Это устройство является наиболее близким к изобретению по технической сущности и получаемому эффекту.
Указанное устройство отличается слож ностыр и недостаточной надежностью, обуо позленными трудностями изготовления и сборки регулятора. Установка датчика требует дополнительных точных механических работ при изготовлении и монтаже машины, что удорожает устройство в целом. Необходимость выполнения допооиитепрьных выводе сквозь герметизированную обшивку ком пенсатора понижает надежность. Кроме того,отсутствуют средства обеспечения статической устойчивости положения ротора аа критическим углом, без которых как показал опыт внедрения, невозможно непрерьданое изменение величины реактивной мощ ности в зоне искусственной устойчивости ротора компенсатора от критического угла до угла опрокидьтания. При этом невозможно установить точное значение реактивной мощности в пределах между значениями, соответствующими критическому углу и углу опрокидьтания,
. Цепью изобретения является упрощение конструкции регулятора путем замены электромеханического датчика угда поворота ротора на электрический и повышение точноо ти регулирования за счет обеспечения статической устойчивости за критическим угпо
Это достигается тем, что в известном автоматическом регуляторе реверсивного компенсатора с возбуждением по одной .оси, содержащем задатчюс управлякидего сигнала и бпок, реагирующий на положение ротора относительно поля статора, связанные через сумматор с исполнительным блоком, блок, реагирующий на положение ротора, вьшопнен в виде датчика реактивного тока со входами по току и напряжению, регулятор снабжен ограничителем минималь кого уровня и вторым сумматором. Выход датчика реактивного тока связан с первым сумматором через соеданенные послодовательно второй сумматс и ограничитель минимапьного уровня, а ко второму вход; вто рого сумматора подключзн вход по напряжению датчика реактивного тока. При этом регулятор снабжен инерционным звеном, включенным между ограничителем минималь ноге уровня и выходом второго сумматора, и элементом с характеристикой насыщения, включенным между за датчиком управляющего сигнала и первым сумматором.
Так как датчик реактивного тока не требует связи с ротором компенсатора, то отпадает необходимость в работах по установке на роторе внутри компенсатора эпектромеханического устройства, выполнения
вьгоодов сквозь герметизированную обшивку и прокладка кабеля от компенсатора, находящегося на улице, в помещение с регулятором.
Ограничитель минимального уровня введен в связи, с тем, что датчик реактивного тока выдает сигнал как при отрицательном, так и при положительном возбуждении. Ограничитель минимального уровня бпокируё
сигнал датчика реактивного тока при положительном воз ждении. В известном регуляторе такой элемент можно было не устанавтшвать, так как при положительном возбуждении угол поворота ротора неизменен. Что
бы сигнал обратной связи по реактивному току сделать зависящим в основном только от положения ротора, а не от напряжения статора и тем самым повысить точность компенсации, на входе ограничителя минимального уровня целесообразно включить второй сумматор, один вход которого подключен к выходу датчика реактивного тока, а аругоб - ко входу этого датчика по напряжению,
Инерционное звено дает возможность установить ротор в любое положение меж ду критическим углом и углом опрокидывания без нарушения статической устойчивости. Таким образом обеспечивается точность
регулирования реактивной мощности в энергосистеме,
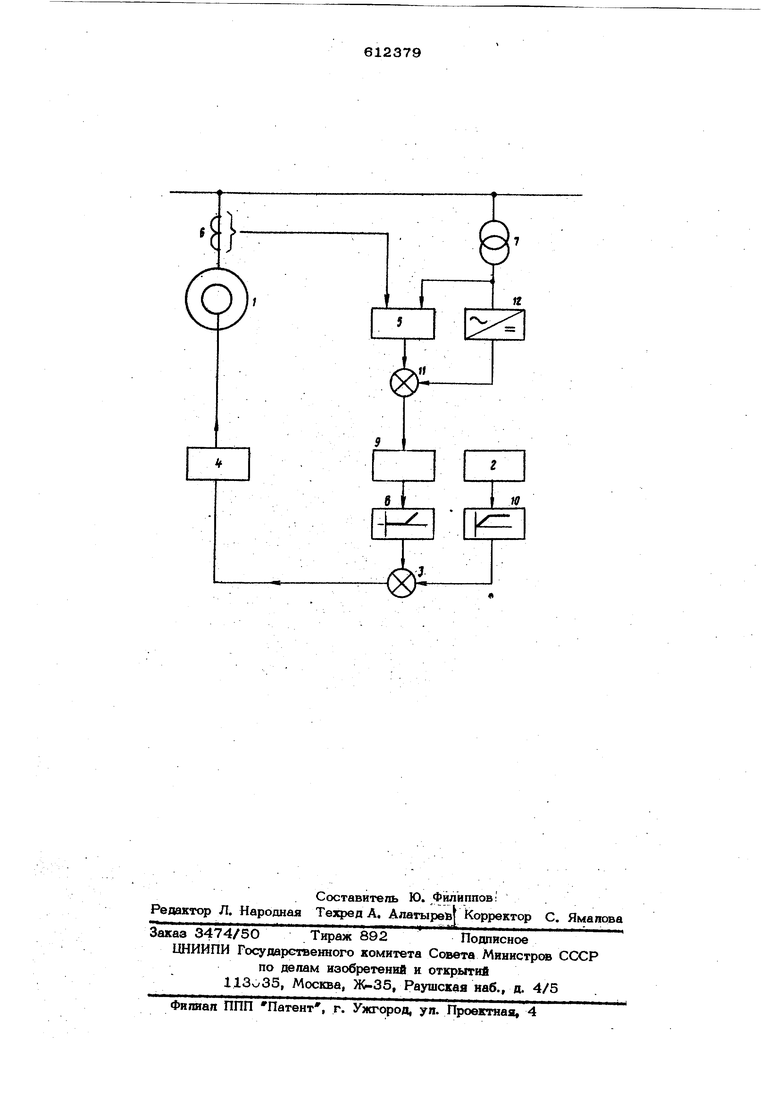
На чертеже представлена структурная схема предлагаемого регулятора, Регулятор реверсивного синхронного Компенсатора 1 содержит задатчик 2, управляющего сигнала,выход которого сЬединен с одним из входов сумматора 3, Вькод сумматора 3 связан со входом реверсивного возбудителя 4, питающего обмотку возбуждения компенсатора 1 ,
В цепь статора компенсатора датчик реактивного тока 5, токовым входом через согласукяций трансформатор тока 6j и входом по напряжению через согласующий трансформатор напряжения 7. Выход датчика реактивного тока 5 соеднне} со входом ограничителя 8 минимального уровня 8, выход которого связан с сумматором 3,
Непосредственно перед входом ограничив теля 8 может быть включено инерционное звено 9, а между сумматором 3 и задат. чшсом 2 - элемент 10с характеристикой насыщения. На выходе датчика возможно включение второго сумматора 11, второй вход которого соединяется с выходом ; прямителя 12, подключенного ко входу 5 по напряжению. Выход сумматора 11 вклю чается на вход инерционного звена 9,
При изменении аадатчиком 2 режима возбуждения от попожитепьного до отрицатепьного цепь обратной связи по реактивному току не действует, покр реактивный ток статора компенсатора 1 не достигнет уровня, установпенного элементом 8. При дальнейшем увеличении потребляемого реактивного тока статора элемент 8 пропускает сигнал от датчика 5 на вход сумматора 3 обратная связь замыкается и обеспечиваетч, ся устойчивость ротора компенсатора за критическим углом. Это объясняется тем, что сигнад реактивного тока пропорционапе отклонениям тока возбужоения, нaпpsIжeния статора и угла поворота ротора компенсатора. Возникакхпая обратная связь по току возбуждения влияет только на коэффициент усиления цепи передачи сигнала от задатчика 2 до возбудителя 4, что может быть легко учтено в коэффициенте усилиния возбудителя или задзтчика.
Составпякяцая сигнала датчика реактивного тока, пропорциональная углу, обеспечивает устойчивость ротора лишь в небопыших преоепах изменения сигнала, находлщияся вьпие уровня ограничения элемента 8 Введение инерционного звена 9 в цепь этой обратной связи обеспечивает ее устойчивость вплоть до угю опрокипьюания ротора.
Для обеспечения ротора в пределах угла опрокидьгаания сигнал за датчика ограничен элементом насыщения 1О. При достижении сигнала выхода элемента 2 порога насьпцения в элементе 10 задающее воздействие перестает изменяться и ротор не переходит за предельно допустимый угол Чтобы устранить в этом режиме щзугое возмущение, а именно составГляюшую сигнала датчика реактивного тока, пропорцнональкую напряжению статора, введена компенсирующая цепь по этому напряжению на апвментах 12 в 11.
Замена в предлагаемом регуляторе электромеханического- датчика чисто aiieKiw рическйм устраняет трудоемкие работы по установке датчика на ротсфе, обеспечивает
транспортировку и сборкуротора, ycTpaHaet необходимость выполнять проводку в герме тизированной обшивке корпуса компенсатор позволяет протпе контролировать исправность измерительных цепей и существенно повьпиает надежность работы компенсатсфа Введение инерционного элемента пoзвoляet плавно изменять загрузку компенсатора, облегчая работу диспетчера энергосистемы,
Формула язобретення
1.Автоматический регулятор реверсивного синхронного компенсатора с возбгуждениё по одной оси, содержащий задатчик управляющего сигнала и блок, реагирующий на положение ротора относительно поля стато15а связанные через сумматор с. исполнитель1 ь ным блоком, отличающийся
тем, что, с целью упрощения, блок, реагирующий на положение ротора, выполнен в виде реактквного тока со входами по току и напряжению, регулятор снабжен ограничителем минимального уровня и вторым сумматс юм, причем выход датчика реактивного тока свяааи с первым сумматором через соедянеиныа лостдовательно вторсА сумматор я ограничитель минимального уровне, а ко второму входу второго сумматора подключен вход ло напряжению датчика реактивного тока.
2.Регуяятср по п. 1, о т л я ч а lo щ и и с я тем, что, с целью повыцюиия точности регулирования, ов скабмсен ине1 ционным юном, включенным между ограничвтепем миннмат ного урсивня и выходом BTqporo сумматора, и аяемектом с характеристикой нас ышения, вкяшочеииым между задатчиком управл5оатего свгнала и пб{ вым сумматором.
Источники информации, принятые во внимание при экспертизе:
1.Важное А. И. Электрические маш вы а, Энергия, 1969, с. 452-454.
2.Авторское свилвтельство СССР N 154931, кп. Н 02 Р 9/14, 1962.
3.Авторское свидвтвлылво СССР М173297, кп, Н 02 Р 9/14, 1964.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического регулирования возбуждения реверсивного синхронного компенсатора | 1985 |
|
SU1309253A1 |
| Способ управления бесщеточной синхронной машиной | 1985 |
|
SU1305821A1 |
| Способ управления бесщеточной синхронной машиной | 1988 |
|
SU1624657A2 |
| Устройство для ограничения минимального уровня возбуждения синхронной машины | 1977 |
|
SU663059A1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| Электропривод с синхронным двигателем | 1975 |
|
SU809460A2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
| СПОСОБ УПРАВЛЕНИЯ ТОКОМ ВОЗБУЖДЕНИЯ СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2002 |
|
RU2239936C2 |
| Устройство для регулирования возбуждения синхронного генератора | 1986 |
|
SU1376211A1 |