ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Данное изобретение относится к системе управления, в частности к системе, которая предназначена для использования с оборудованием, имеющим движущиеся части, таким как гибочные прессы, и которая способна обнаруживать объекты, находящиеся на траектории указанной движущейся части и управлять соответствующим перемещением указанной части.
Обычно гибочный пресс имеет удлиненный штамп с V-образной канавкой, проходящей вдоль ее верхней поверхности, и лезвие с ведущей кромкой, которая входит в канавку штампа. Для изгибания листового металла в большинстве прессов перемещают подающее устройство в положение, обеспечивающее выравнивание материала. Материал помещают на штамп, и при этом он может быть вставлен в направляющие, имеющиеся на фиксаторах подающих устройств.
Затем оператор включает пресс для опускания вниз лезвия, которое входит в контакт с листовым металлом, размещенным над канавкой штампа, и изгибает его.
Контроллер (устройство, управляющее перемещением лезвия) может быть включен механическими средствами или устройством обнаружения присутствия. В качестве механических средств могут быть использованы, например, педальные выключатели, выключатели подачи, которые необходимо включать двумя руками, и т.п. В качестве устройств обнаружения присутствия перед лезвием размещают световые завесы, которые позволяют включить лезвие, когда оператор убирает руки из контролируемой зоны.
Если лезвие не настроено на отведение на достаточное расстояние от заготовки, извлечение материала из штампа после завершения гибки может быть затруднено. По этой причине лезвие пресса часто настраивают на подъем до высоты, позволяющей легко извлечь готовое изделие и поместить на штамп следующее. Однако подъем лезвия на заданную высоту снижает производительность и увеличивает загруженность оператора, поскольку он должен выжидать до тех пор, пока лезвие не будет отведено, а затем при включении выключателя подачи подведено к следующей заготовке, размещенной на штампе.
Относительно большая высота подъема лезвия также повышает опасность травмирования оператора, т.к. в имеющийся зазор могут попасть его руки или пальцы. Для повышения производительности используют различные решения, такие как программирование высоты подъема лезвия на каждом этапе гибки и/или быстрая подача лезвия к материалу.
Было предложено большое количество систем определения наличия под лезвием пальцев или рук оператора и предотвращения травм.
Для решения этой задачи, а также для повышения производительности путем обеспечения относительной безопасности при перемещении лезвия через границу опасной зоны можно использовать, например, лазерную систему, лучи которой направлены вдоль нижней стороны лезвия. В ранней патентной заявке заявителя, опубликованной под номером международной публикации WO 03/104711, раскрыт усовершенствованный способ решения указанной задачи. Указанное изобретение описывает устройство для обеспечения безопасности, способное замедлить лезвие и остановить его при выявлении нарушающего безопасность действия.
В качестве реакции на полученные изображения в данном устройстве предусмотрено только замедление и останов лезвия, возобновление перемещения лезвия возможно только после повторного включения оператором выключателя подачи. Кроме того, известно, что лазерные системы, направляющие лучи вдоль нижней поверхности лезвия, подвержены влиянию вибрации, обусловленной большой длиной лезвия, и поэтому требуют периодической ручной корректировки.
Для повышения безопасности лезвие можно остановить над материалом на заданном расстоянии от места, часто называемого границей опасной зоны, после чего для продолжения гибки требуется повторное выключение и включение выключателя подачи. При этом выравнивание материала, включение выключателя подачи, ожидание подхода лезвия к материалу, выключение и повторное включение выключателя подачи на границе опасной зоны приводит к дополнительным затратам времени и снижению производительности. В другом варианте, описанном в заявке WO 03/104711 и в других патентах, обследуют область перед лезвием, и при соблюдении заданного условия оно может быть перемещено без остановки через границу опасной зоны. Однако данный способ применим, только если известно, что область перед лезвием безопасна, к тому же при этом снижена безопасность оператора и степень его вовлеченности в управление, поскольку лезвие перемещают на относительно большое расстояние до его контакта с материалом. Кроме этого, при использовании данного решения не происходит остановки лезвия непосредственно перед материалом и оператор не может осуществить выравнивание материала по лезвию.
Некоторые современные гибочные прессы связаны с компьютерными системами, позволяющими выводить на экран компьютера графическую информацию о гибке. Компьютер также способен поднимать лезвие на соответствующую высоту для гибки. Однако при неверном расположении материала на штампе гибка все равно будет выполнена, что приведет к браку, или же оператор должен будет остановить оборудование для выравнивания материала на штампе.
Кроме того, в существующих гибочных прессах затруднено изгибание коробок, т.к. сначала нужно загнуть две стороны коробки, а затем повернуть заготовку на 90° и загнуть заднюю стенку коробки. При невыровненном материале или не строго горизонтальном размещении его на штампе возможно повреждение левой или правой кромки лезвия либо смятие материала вследствие попадания под лезвие одной из вертикальных сторон коробки. Такое наиболее вероятно, если при включении выключателя подачи не было осуществлено выравнивание материала.
Для того чтобы этого избежать, применяют лазерные системы, позволяющие остановить лезвие непосредственно над вертикальными сторонами коробки или выполнить такой останов оборудования, который предоставит возможность выравнивания материала относительно лезвия, так чтобы оно прошло между сторонами коробки и не коснулось их. Кроме того, оператор может уменьшить высоту подъема лезвия до высоты, уступающей высоте вертикальных сторон коробки, что, однако, может затруднить вставку и извлечение согнутой заготовки.
Кроме того, вследствие дополнительных затрат времени производительность подобных систем меньше.
Решение указанных выше задач может потребовать использования множества устройств, размещение которых приведет к излишнему усложнению системы при увеличении количества деталей, которые могут быть повреждены или должны быть откалиброваны при установке на оборудование или выровнены и которые могут выйти из строя в ходе эксплуатации или помешать перемещению материала, лезвия, штампа или сгибаемых поверхностей.
В данном изобретении предпринята попытка устранить по меньшей мере некоторые из вышеупомянутых проблем.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Согласно одному аспекту данного изобретения предложена система управления гибочным прессом, имеющим рабочий орган, выполненный с возможностью перемещения по известной траектории, содержащая средства обнаружения объектов, расположенных на траектории рабочего органа или рядом с ней, отличающаяся тем, что она снабжена средствами определения расстояния между указанными объектами и ведущей кромкой рабочего органа, средствами обработки данных и управления, обеспечивающими в первом рабочем режиме, заключающемся в перемещении рабочего органа, расстояние между ведущей кромкой рабочего органа и объектами, расположенными на его траектории или рядом с ней, в диапазоне между минимальным и максимальным значениями.
Согласно еще одному аспекту изобретения средства обнаружения объектов на траектории рабочего органа или рядом с ней содержат светоизлучающие средства, выполненные с возможностью освещения области около указанной траектории, и светоприемные средства, выполненные с возможностью приема света, прошедшего через указанную область, размещенные таким образом, что обнаруженные объекты отбрасывают тени на светоприемные средства, связанные со средствами обработки данных и средствами управления для определения наличия препятствий в упомянутой области на основе изображений, полученных указанными светоприемными средствами.
Согласно еще одному аспекту изобретения средства обработки данных и управления содержат средства запоминания, которые выполнены с возможностью хранения изображений, полученных светоприемными средствами, в качестве известных изображений.
Согласно еще одному аспекту изобретения средства обработки данных и управления содержат средства получения известных изображений от внешнего источника.
Согласно еще одному аспекту изобретения указанное максимальное значение задано таким, что рабочий орган и штамп остаются в зоне, контролируемой светоприемными средствами, а указанное минимальное значение выбрано достаточно большим для свободного размещения материала на штампе и удаления с него.
Согласно еще одному аспекту изобретения величину упомянутых максимального и минимального значения изменяют в зависимости от степени соответствия полученного светоприемными средствами изображения известному изображению, сохраненному в упомянутых средствах запоминания.
Согласно еще одному аспекту изобретения предлагаемая система управления обеспечивает продолжение работы в первом рабочем режиме при несовпадении изображения, полученное средствами обработки данных и управления, ни с одним из известных изображений.
Согласно еще одному аспекту изобретения предлагаемая система управления содержит выключатель подачи, при включении которого осуществляется первый рабочий режим перемещения рабочего органа.
Согласно еще одному аспекту изобретения предлагаемая система управления обеспечивает второй рабочий режим, при котором осуществляется подведение рабочего органа к обрабатываемому материалу на расстояние менее минимального.
Согласно еще одному аспекту изобретения предлагаемая система управления в упомянутом втором рабочем режиме обеспечивает осуществление подведения рабочего органа к материалу на расстояние, при котором оператор не может вставить между ними пальцы.
Согласно еще одному аспекту изобретения предлагаемая система управления обеспечивает переход из первого рабочего режима во второй рабочий режим в случае совпадении части изображения, полученного светоприемными средствами и имеющего форму и ориентацию материала на штампе, с соответствующей частью одного из известных изображений.
Согласно еще одному аспекту изобретения предлагаемая система управления обеспечивает переход из первого рабочего режима во второй рабочий режим в случае, если изображение, полученное светоприемными средствами, является одним из указанных известных изображений.
Согласно еще одному аспекту изобретения предлагаемая система управления обеспечивает переход из первого рабочего режима во второй рабочий режим при выключении и включении оператором указанного выключателя подачи, при этом изображения, полученные средствами обработки данных и управления, используют для создания известного изображения при подводе рабочего органа к штампу во втором рабочем режиме.
Согласно еще одному аспекту изобретения предлагаемая система управления обеспечивает рабочий режим при гибке материала на штампе, в котором перемещение рабочего органа приводит к гибке.
Согласно еще одному аспекту изобретения известное изображение, полученное во втором рабочем режиме, сохранено в средствах запоминания как известное изображение после начала гибки.
Согласно еще одному аспекту изобретения предлагаемая система управления обеспечивает переход из второго рабочего режима в третий рабочий режим при выключении и повторном включении выключателя подачи.
Согласно еще одному аспекту изобретения предлагаемая система управления обеспечивает четвертый режим работы, при котором рабочий орган отведен от штампа.
Согласно еще одному аспекту изобретения предлагаемая система управления имеет выключатель отвода и переходит в четвертый рабочий режим при его включении оператором.
Согласно еще одному аспекту изобретения при первом рабочем режиме средствами обработки данных и управления на основе изображений, полученных светоприемным средством, определены зона отвода, размещенная вокруг рабочего органа, так что при обнаружении в ней ближайших к рабочему органу объектов его от них отводят, зона останова, размещенная вокруг зоны отвода, так что при обнаружении в зоне останова ближайших к рабочему органу объектов прекращают его перемещение, и первая зона подвода, размещенная вокруг зоны останова так, что при обнаружении в первой зоне подвода ближайших к рабочему органу объектов его к ним подводят.
Согласно еще одному аспекту изобретения указанными средствами обработки данных и управления определена вторая зона подвода, размещенная вокруг первой зоны подвода, так что при обнаружении во второй зоне подвода ближайших к рабочему органу объектов его к ним подводят с относительно большой скоростью, превышающей скорость перемещения рабочего органа при обнаружении ближайших к рабочему органу объектов в первой зоне подвода.
Согласно еще одному аспекту изобретения для обеспечения плавного перемещения рабочего органа его скорость изменяют в зависимости от расстояния между ним и границей области, образованной указанными минимальным и максимальным значениями.
Согласно еще одному аспекту изобретения светоизлучающие средства содержат лазерный диод, при этом проходящий через него ток модулируют для получения переменных спекл-структур и улучшения таким образом разрешения полученного изображения.
Согласно еще одному аспекту изобретения указанные светоприемные средства содержат экран, на который падает свет, прошедший через указанную область, и который текстурирован для снижения влияния спекл-структур, созданных при помощи лазерного диода.
Согласно еще одному аспекту изобретения указанные светоизлучающие средства имеют регулировочные средства, содержащие несколько линейных электроприводов, которые соединены со светоизлучающими средствами и выполнены с возможностью перемещения в направлении, параллельном оси излучаемого света, при этом линейное перемещение любого из них изменяет его направление, а их одновременное перемещение увеличивает или уменьшает оптическое расстояние между светоизлучающими и светоприемными средствами.
Согласно еще одному аспекту изобретения средства обработки данных и управления содержат программу, постоянно размещенную в процессоре для цифровой обработки сигналов.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Настоящее изобретение описано со ссылками на примеры, представленные на сопровождающих чертежах, на которых:
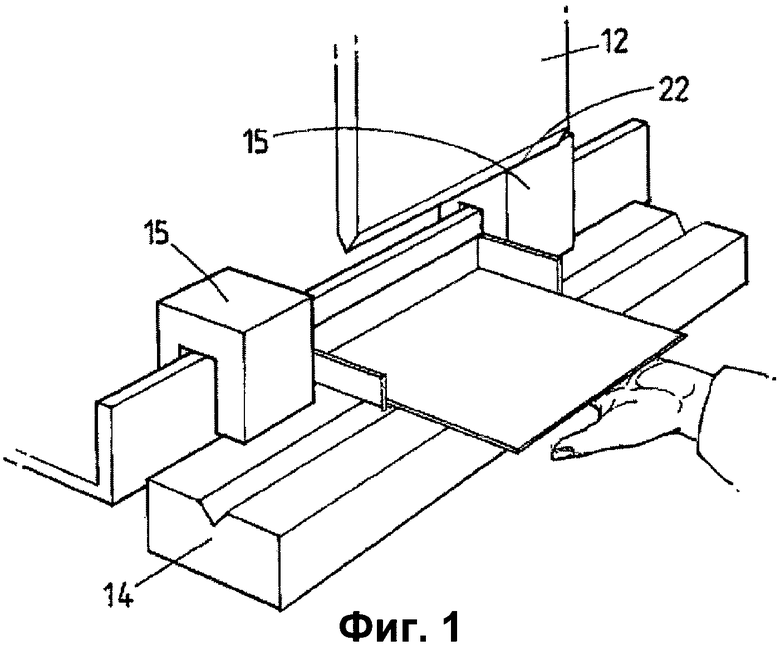
фиг.1 изображает обычный гибочный пресс, с которым может быть использована система управления согласно настоящему изобретению, вместе с боковыми фиксаторами материала, которые можно использовать в данном изобретении;
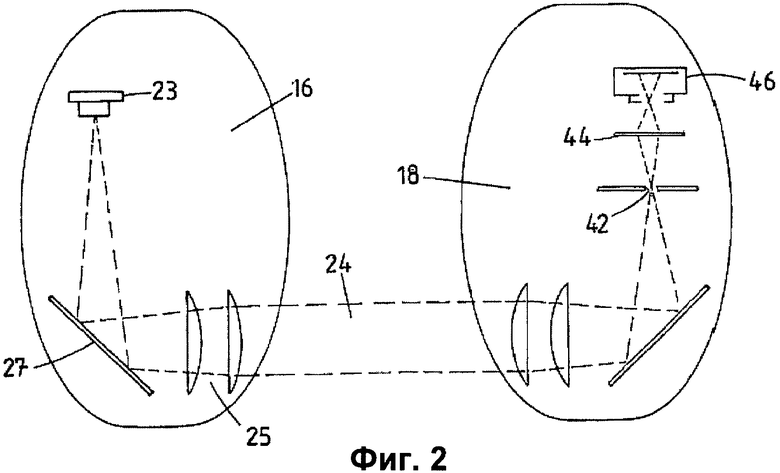
фиг.2 изображает светоизлучающие средства и светоприемные средства системы управления согласно данному изобретению;
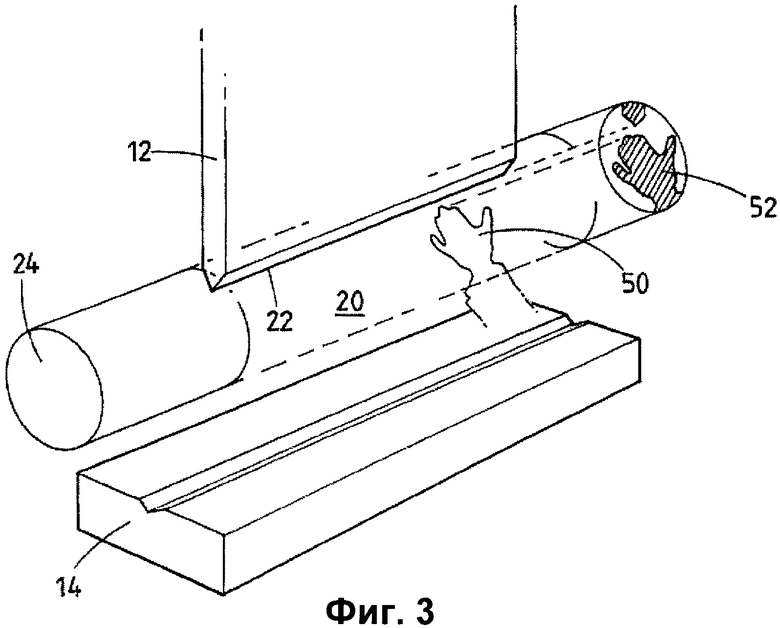
фиг.3 изображает вид в перспективе гибочного пресса с зоной, освещенной в соответствии с настоящим изобретением и размещенной вокруг кромки рабочего органа;
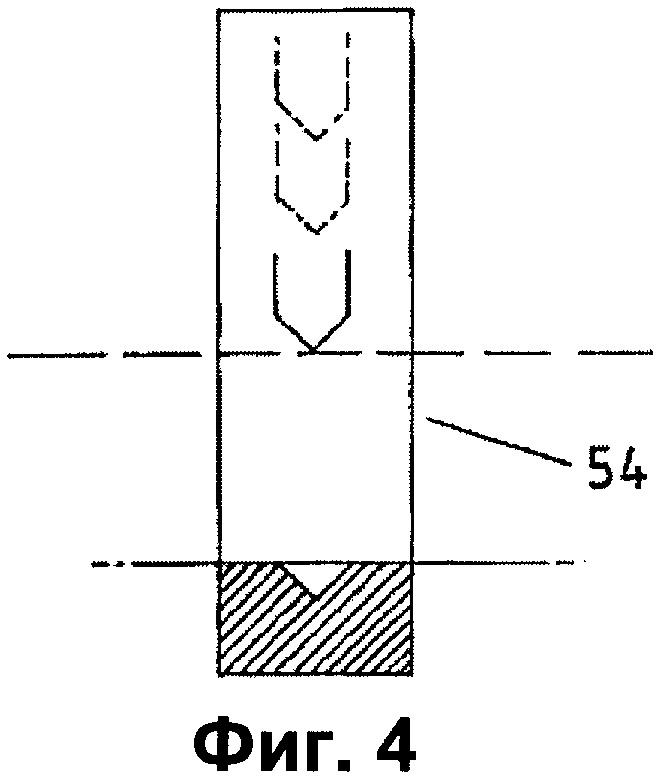
фиг.4 изображает теневую карту, созданную системой управления согласно данному изобретению;
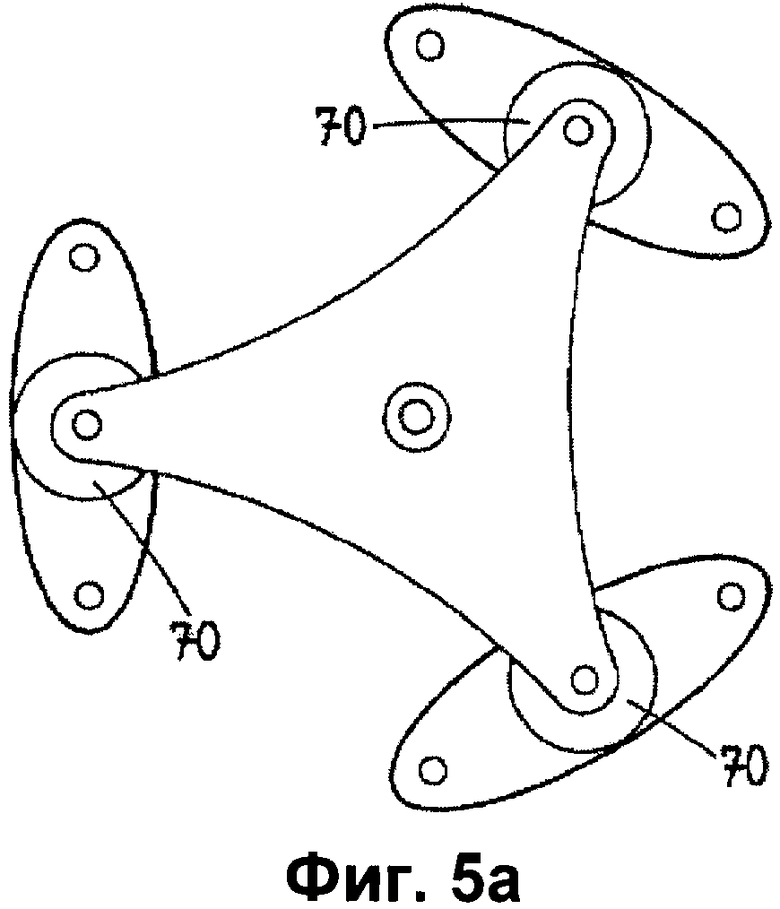
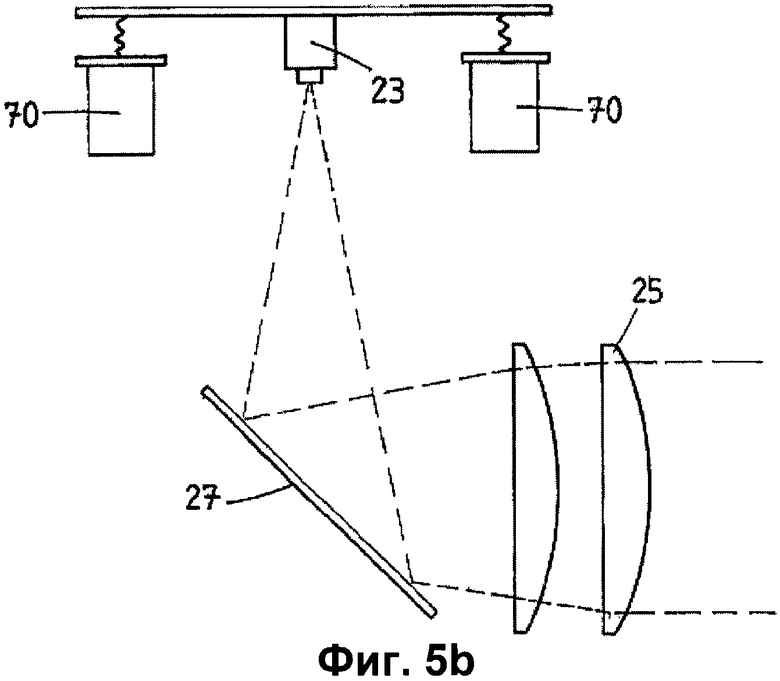
фиг.5а изображает вид сверху системы регулировки светоизлучающих средств, предназначенной для использования с системой управления согласно данному изобретению;
фиг.5b изображает вид сбоку системы регулировки светоизлучающих средств, представленной на фиг.5а;
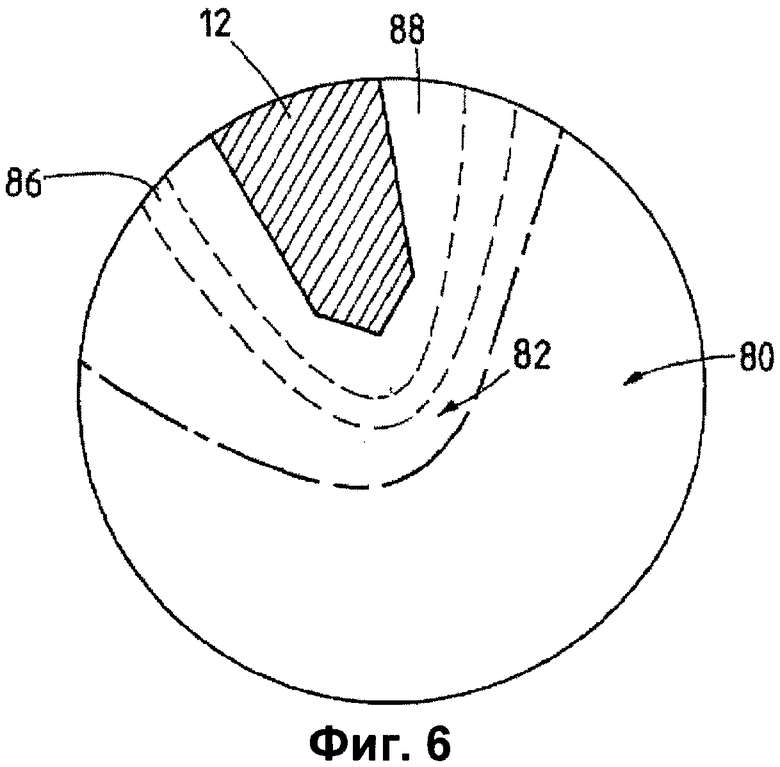
фиг.6 иллюстрирует конфигурацию различных зон вокруг передней кромки рабочего органа в составе системы управления, используемых для управления его перемещением;
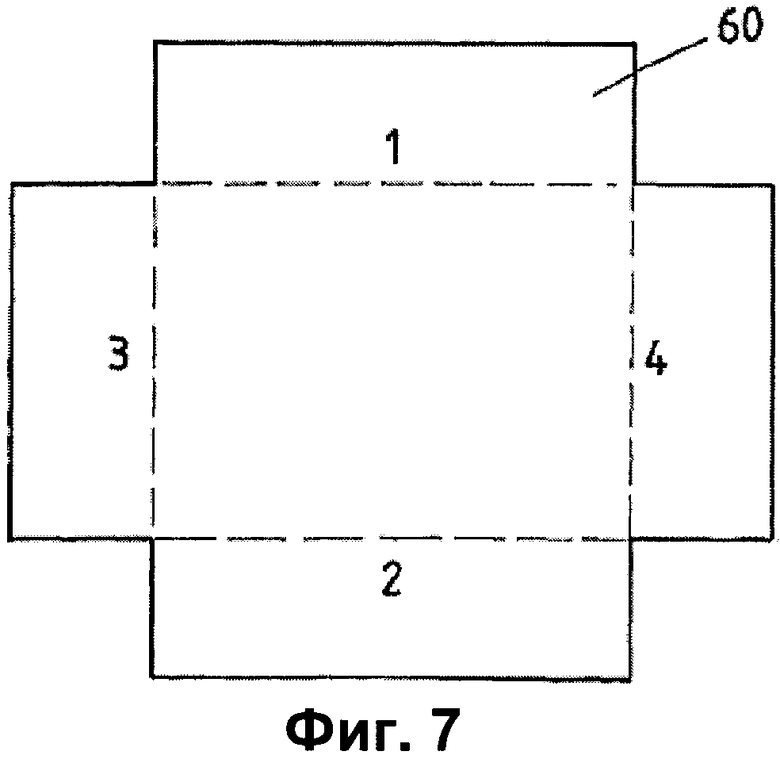
фиг.7 изображает вид сверху листового материала, предназначенного для сгибания в коробку;
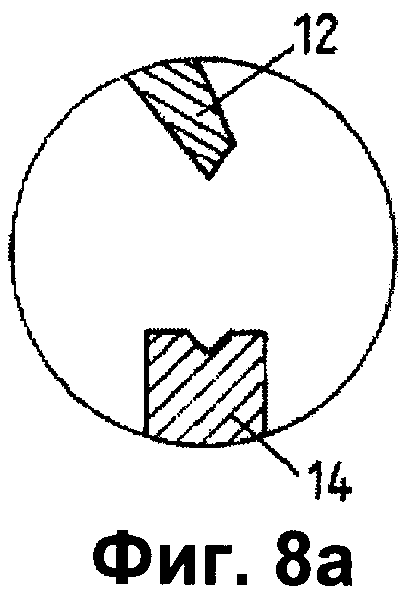
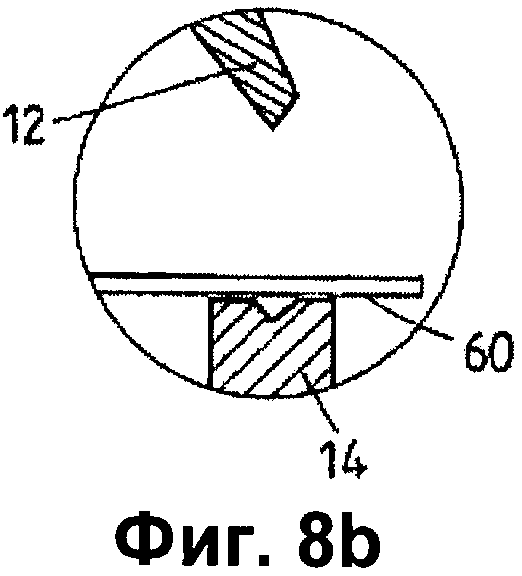
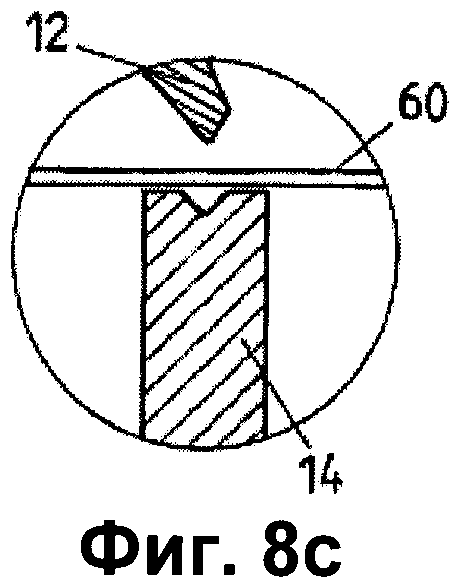
фиг.8а - 8с изображают тени, отбрасываемые на светоприемные средства на первых двух этапах гибки листового материала, представленного на фиг.7;
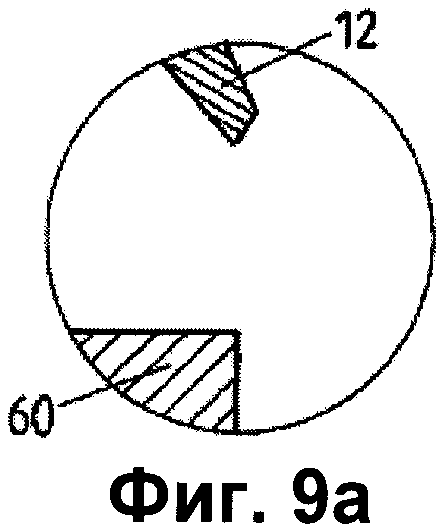
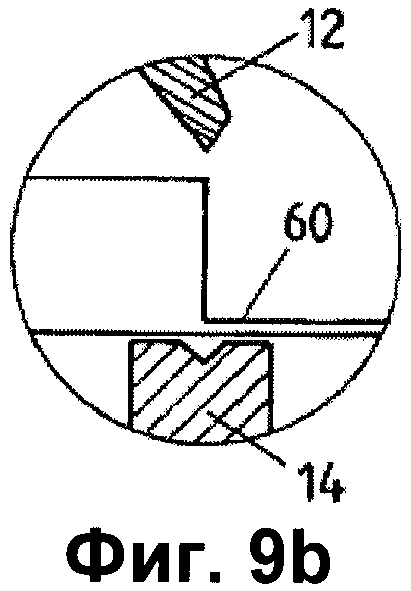
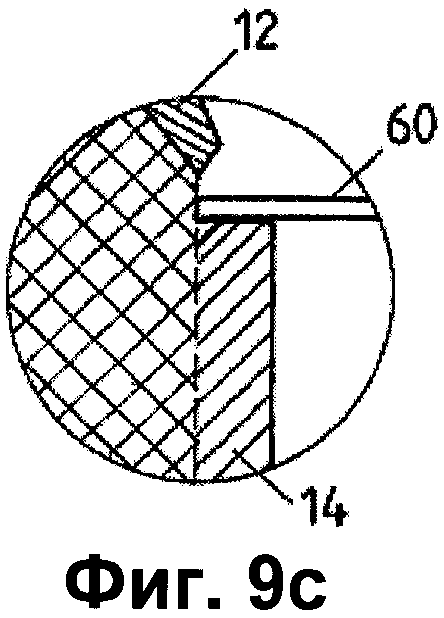
фиг.9а - 9с изображают тени, отбрасываемые на светоприемные средства на третьем и четвертом этапах гибки листового материала, представленного на фиг.7;
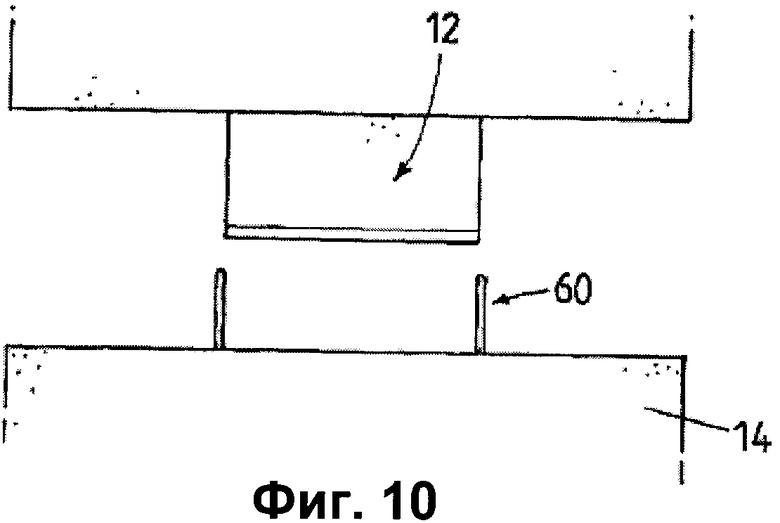
фиг.10 изображает вид спереди гибочного пресса на третьем этапе гибки, приведенном на фиг.9;
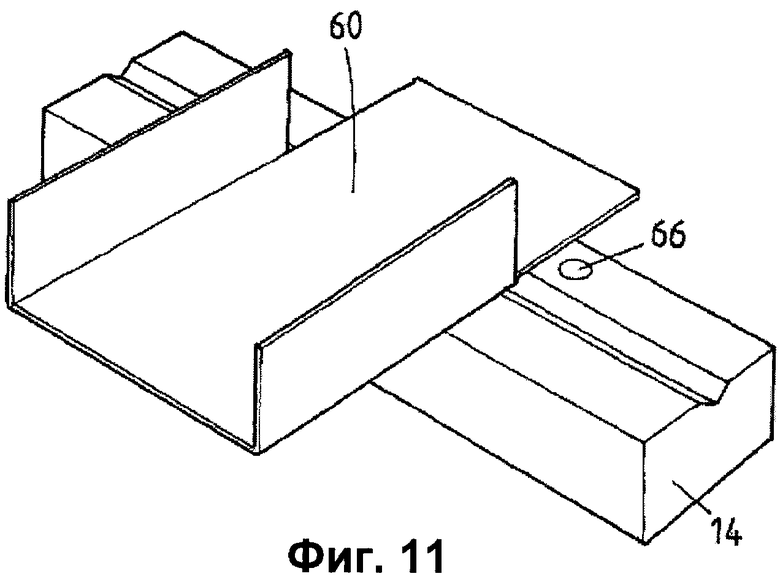
фиг.11 изображает вид в перспективе гибочного пресса с системой управления, содержащей средства определения положения;
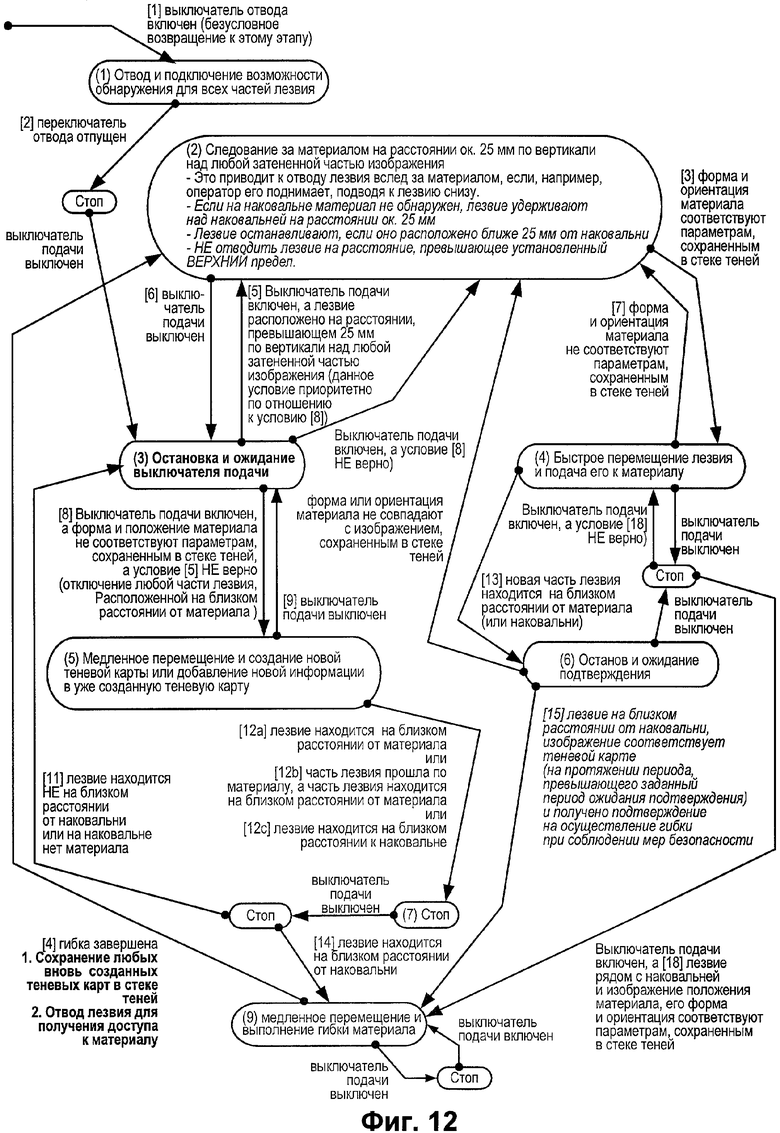
фиг.12 изображает блок-схему перемещения рабочего органа гибочного пресса в составе системы управления согласно данному изобретению;
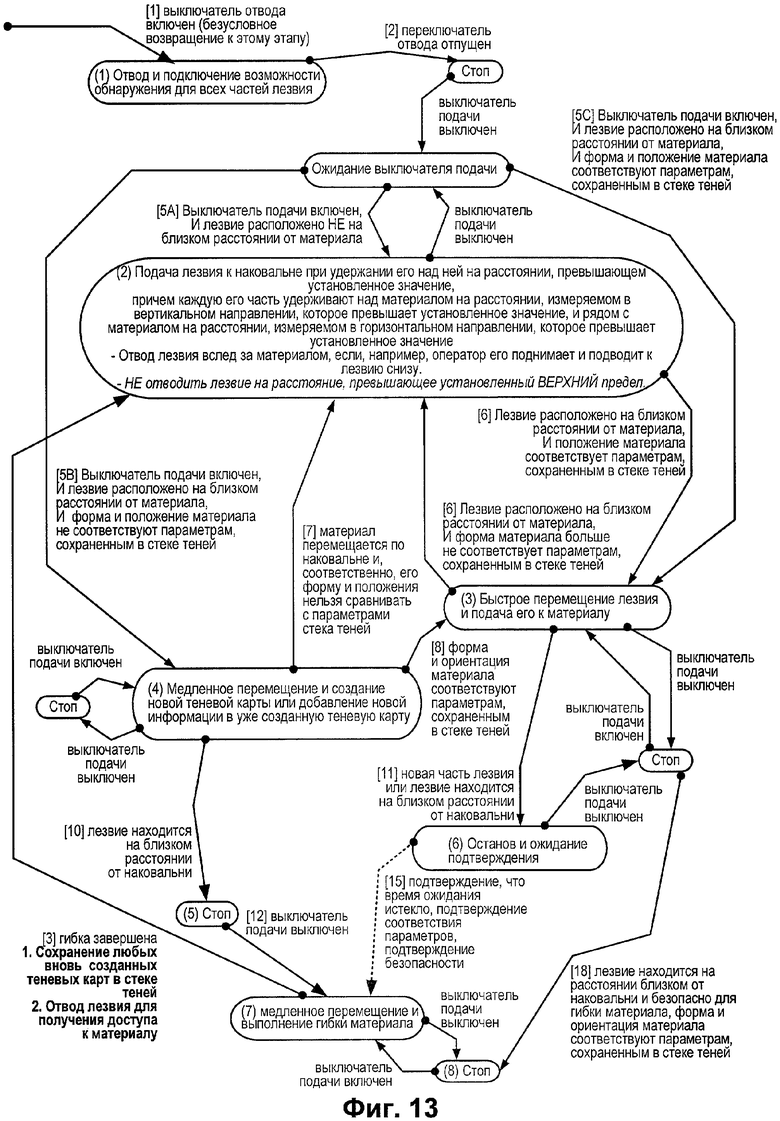
фиг.13 изображает блок-схему перемещения рабочего органа гибочного пресса в составе системы управления согласно второму варианту осуществления данного изобретения;
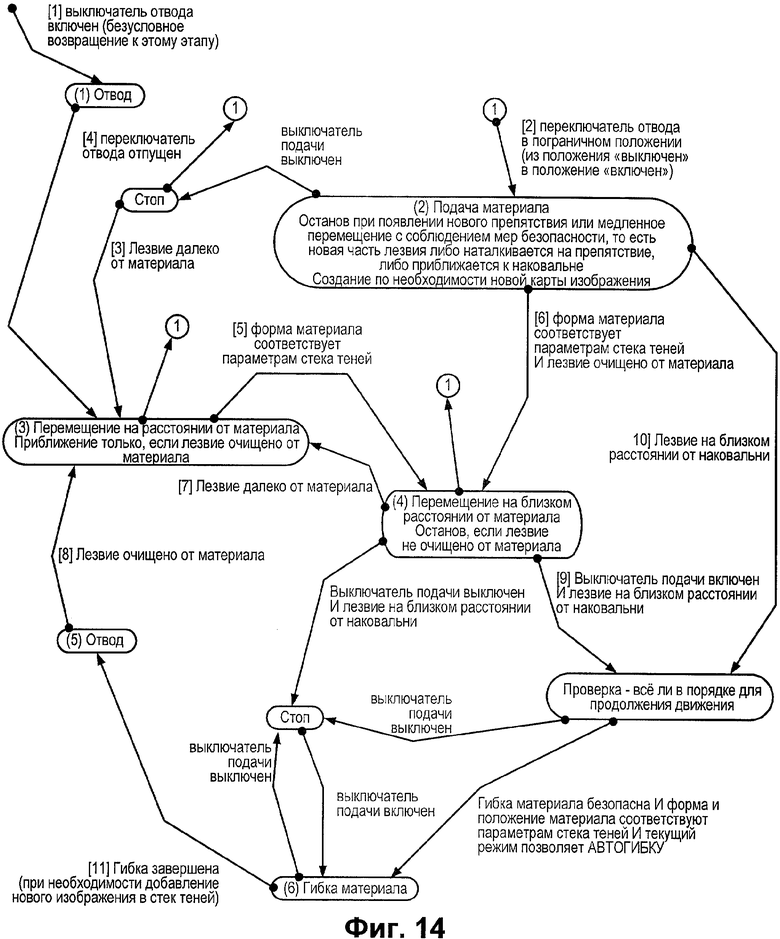
фиг.14 изображает блок-схему перемещения рабочего органа гибочного пресса в составе системы управления согласно третьему варианту осуществления данного изобретения;
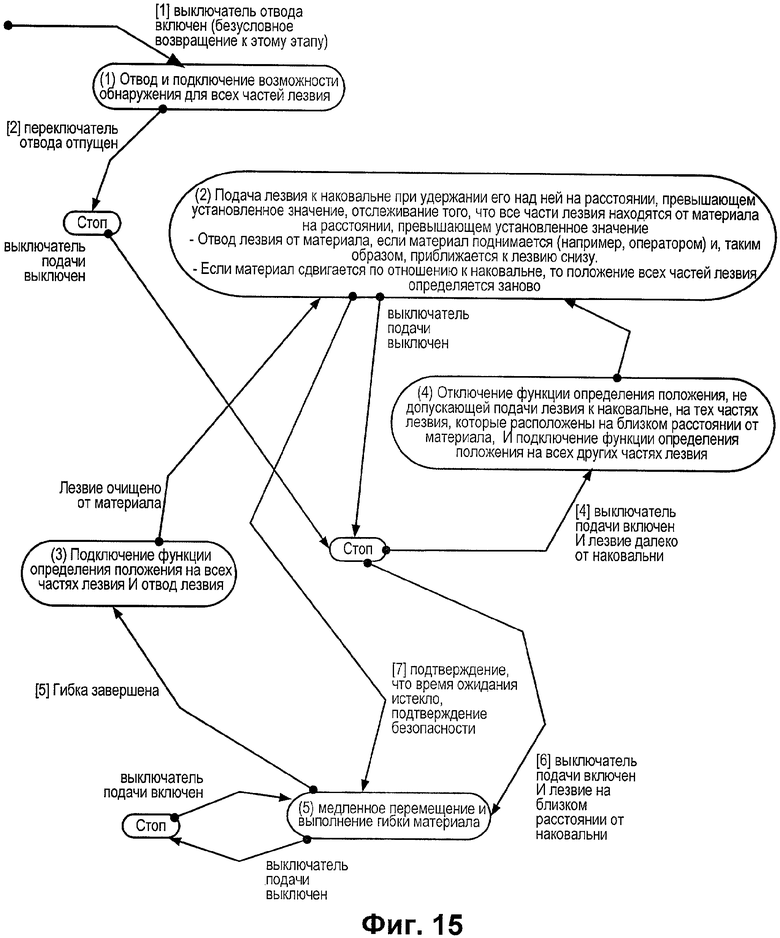
фиг.15 изображает блок-схему перемещения рабочего органа гибочного пресса в составе системы управления согласно четвертому варианту осуществления данного изобретения;
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
На чертежах показана система управления, предназначенная для использования с оборудованием, имеющим движущиеся части, и служащая для обнаружения препятствий на траектории движущейся части. В приведенном варианте осуществления изобретения указанную систему управления применяют на гибочном прессе, который содержит перемещаемый рабочий орган 12, установленный с возможностью нанесения удара по заготовке, помещенной на штамп 14.
На фиг.1-3 показано чувствительное устройство для обнаружения объектов, принцип работы которого описан в международной патентной заявке, опубликованной под номером международной публикации WO 03/104711, и на базе которого может быть реализовано настоящее изобретение. Для работы системы управления необходимы средства определения протяженности объектов, расположенных на траектории рабочего органа 12 или вблизи нее, а также средства обработки данных и управления, выполненные с возможностью определения расстояния между этими объектами и ведущей кромкой 22 рабочего органа 12.
Известная система управления 10 содержит светоизлучающие средства 16 и светоприемные средства 18. Средства 16 расположены так, чтобы освещать зону 20 вокруг части траектории рабочего органа 12 для обнаружения препятствий в этой зоне.
Фиг.2 показывает конфигурацию, в которой для получения широкого параллельного светового луча 24 использованы лазерный диод 23, зеркало 27 и система линз. Средства 18 содержат микроотверстие 42, проекционный экран 44 и камеру, оснащенную прибором 46 с зарядовой связью (ПЗС).
Как показано на фиг.3, средства 16 установлены с одного конца рабочего органа 12 гибочного пресса, так что луч 24 освещает зону 20 вокруг траектории рабочего органа 12 с охватом его кромки 22. Средства 18, установленные с противоположного конца рабочего органа 12, предназначены для приема луча 24. Препятствие 50, например рука оператора, при входе в зону 20 отбрасывает соответствующую тень 52 на прибор 46.
При использовании лазерного диода с фиксированной длиной волны на проекционном экране наблюдают высококонтрастный спекл, который вызывает нежелательное для системы управления уменьшение разрешающей способности. Также отмечено, что длина волны лазерного диода зависит от температуры и выходной мощности, а характер спекл-структур зависит от длины волны лазерного диода. Для получения изображения соответствующего разрешения ток, проходящий через лазерный диод, регулируют так, чтобы длина волны в данном случае изменялась примерно на 0,3%. Высокочастотное изменение тока обусловливает формирование за время выдержки ПЗС-камеры большого числа лучей с различной длиной волны и, соответственно, большого числа принимаемых камерой спекл-структур. Пропускаемый через лазерный диод ток и, следовательно, длина волны при низких мощностях меняются медленнее, нежели при высоких, так что камера на приборах с зарядовой связью за время выдержки всегда принимает одинаковое суммарное количество энергии, поступающей от множества лучей с различной длиной волны, и, следовательно, одинаковое суммарное количество энергии от множества различных спекл-структур. В качестве варианта для дополнительного уменьшения энергии спекла проекционный экран может быть изготовлен из волокнистого материала, такого как бумага.
Средства обработки данных и управления (не показаны) подключены с возможностью приема информации от средств 18 и управления работой гибочного пресса.
Средства обработки данных и управления могут представлять собой программное обеспечение, постоянно размещенное в компьютере или процессоре для цифровой обработки сигналов, на вход которого поступает выходной сигнал от средств 18 и который настроен на получение входных сигналов от других источников, таких как оборудование или оператор, и выдачу выходных сигналов на управление оборудованием.
Как описано в упомянутой выше международной патентной заявке, средства обработки данных и управления захватывают изображения, полученные устройством 46, и хранят их в виде теневой карты 54. Теневые карты могут быть также заранее загружены в систему управления из внешнего источника, которым может быть внешняя база данных, содержащая такую информацию, или система, выполненная с возможностью генерирования такой информации на основе данных гибочных процессов. Несколько известных схем 54 хранят в средствах обработки данных (в так называемом 'стеке теней'). Кроме того, каждому типу гибки, выполняемому оператором, может быть присвоен номер (далее 'номер гибки'), и каждый стек теней, хранимый в части теневой карты, соответствует определенному номеру гибки. Под известными схемами 54 понимают такие, на которых показаны статические объекты и материал, предназначенный для гибки.
В предпочтительном варианте осуществления изобретения (фиг.5а и 5b) система управления содержит средства автоматической регулировки направления испускаемого луча, которое изменяют тремя линейными электроприводами или позиционерами 70. Оптическую длину пути луча до системы линз 25 изменяют смещением диода 23 к зеркалу 27 или от него. Соответственно, одновременная работа всех трех электроприводов 70 приводит к схождению или расхождению лазерного луча. Независимым перемещением электроприводов изменяют его направление. В предпочтительном варианте осуществления изобретения их движением управляют средства обработки данных и управления на основе изображения, полученного средствами 18, благодаря чему происходит автоматическое выравнивание обрабатываемого материала.
В заявках WO 03/104711 и в WO 04/079255 описаны проблемы, вызванные вибрацией лазерного луча, которые решены соответственно цифровой коррекцией изображений или области обнаружения. В предпочтительном варианте осуществления изобретения предложены средства регулирования высоты передатчика и приемника относительно лезвия. Их применение несколько снижает жесткость конструкции, что может привести к усилению вибрирования передаваемого лазерного луча. Для устранения данного недостатка в предпочтительном варианте осуществления изобретения использован уравновешенный передатчик, центр тяжести которого выровнен по вертикали с точкой, в которой наблюдается снижение жесткости регулирующего механизма. Эту равновесную точку находят, перемещая противовес нониусом. Для дополнительного уменьшения вибрации можно уменьшить ускорение лезвия и его замедление, а также не регистрировать поступающие изображения во время резкой остановки лезвия и в течение краткого промежутка после нее. Остаточное смещение фокусировки или искажение полученных изображений, вызванные вибрацией или деформацией лезвия, компенсируют расширением затемненных участков изображений, теневыми картами или иными средствами определения смещения фокусировки.
При использовании удлиненных гибочных прессов изображение в непосредственной близости от лезвия может быть искажено воздушным потоком. В этом случае возможно придется отказаться от использования области непосредственно рядом с лезвием или установить гибочный пресс в таком месте, где исключено негативное воздействие воздушного потока.
Система управления согласно настоящему изобретению имеет несколько рабочих режимов.
Рабочий режим системы управления в любой момент времени зависит от изображений, полученных светоприемными средствами, и команд оператора. Система управления согласно настоящему изобретению имеет по меньшей мере один рабочий режим, в котором средства обработки данных и управления используют изображение, полученное средствами 18, для определения расстояния между кромкой 22 рабочего органа 12 и каким-либо препятствием на траектории рабочего органа 12, так что расстояние между его кромкой 22 и ближайшей точкой препятствия поддерживают в предварительно заданном диапазоне между максимальным и минимальным значениями. Иными словами, рабочий орган 12 выполнен с возможностью следовать за перемещением препятствий, что позволяет оператору перемещать заготовку без помех со стороны рабочего органа 12 и необходимости его полного отвода. Указанные минимальное и максимальное значения могут быть заданы оператором, введены заранее или являться динамически изменяемыми величинами, значение которых зависит от размеров объектов, обнаруженных в контролируемой зоне.
На фиг.6 представлена конфигурация зон вокруг рабочего органа 12, которые предварительно заданы в средствах обработки данных и управления для управления перемещением рабочего органа 12 в описанном выше рабочем режиме. Здесь имеется первая зона 82 подачи, вторая зона 80 подачи, зона 86 останова и зона 88 отвода. Если во время работы средствами обработки данных и управления ближайшее к рабочему органу препятствие обнаружено в зоне 80 или не обнаружено, рабочий орган 12 перемещают к штампу 14. Если ближайшее препятствие обнаружено в зоне 82, рабочий орган 12 перемещают к штампу 14 медленнее, чем когда препятствия обнаружены в зоне 80. Если ближайшее препятствие обнаружено в зоне 88, рабочий орган 12 отводят от штампа, а если оно обнаружено в зоне 86, рабочий орган останавливают. Следует отметить, что хотя в приведенном примере описаны четыре зоны, форма которых представлена на чертеже, возможно использование иного количества зон другой формы. Названия указанных зон также могут быть изменены, в зависимости от особенностей выполняемой гибки.
Система управления может также в целом иметь, по меньшей мере, еще три рабочих режима: во втором рабочем режиме лезвие подают к материалу при помещении его на штамп, в третьем режиме сгибают заготовку, а в четвертом режиме осуществляют безусловный отвод рабочего органа 12.
Изменение рабочих режимов системы управления происходит на основе полученных изображений, команд одного или нескольких операторов или данных от других средств ввода, которыми могут быть выключатель подачи и выключатель отвода. При нажатии выключателя отвода происходит отвод рабочего органа 12 от штампа 14, который прекращают отпусканием выключателя отвода или при достижении рабочим органом 12 определенной высоты (или расстояния от материала или штампа).
Включением выключателя подачи перемещают рабочий орган 12 вслед за заготовкой на расстоянии, дающем оператору возможность осуществить выравнивание материала, подвод рабочего органа к заготовке для последующей гибки или гибку заготовки в зависимости от различных факторов, например от того, является ли полученное светоприемными средствами изображение частью известной карты 54.
Далее использование системы управления описано на примере гибки коробки из листового материала 60, показанного на фиг.7. Блок-схема на фиг.12 представляет собой один из алгоритмов, который может быть использован в средствах обработки данных и управления при гибке коробки.
При работе с прессом, как показано на фиг.12, оператор отводит рабочий орган 12 (состояние 1 на фиг.12) с помощью выключателя отвода, освобождая таким образом пространство для размещения материала на штампе 14. При отпускании выключателя отвода система переходит в состояние 3. На фиг.8а изображены рабочий орган 12 и штамп 14 без материала. Затем оператор размещает на штампе 14 материал 60 и включает выключатель подачи. Средства обработки данных и управления переходят в состояние 2 при выполнении условия 5, согласно которому расстояние от лезвия до материала превышает 25 мм, и управляет перемещением рабочего органа 12 таким образом, что объекты, изображения которых не совпадают с любой из известных безопасных теневых карт, удерживаются на заданном расстоянии (в данном случае приблизительно 25 мм) от рабочего органа (состояние 2 на блок-схеме). Если в средствах обработки данных и управления нет предварительно загруженных изображений, то, поскольку нет исходных теневых карт, рабочий орган 12 перемещают на расстояние приблизительно 25 мм от него до штампа 14 с материалом 60. При удержании выключателя подачи в нажатом положении средства обработки данных и управления сохраняют это состояние, следуя таким образом за перемещением заготовки.
Рабочий орган 12 останавливают при описанном выше условии (состояние 2 в блок-схеме, показанной на фиг.8), при этом оператор должен выключить, а затем вновь включить выключатель подачи для продолжения движения при отсутствии опасности. Далее средства обработки данных и управления регистрируют факт выключения выключателя подачи (переход в состояние 3) и его повторное приведение в состояние, в котором рабочий орган расположен от препятствия на расстоянии, не превышающем предварительно заданное. Поскольку получаемое на этом этапе изображение не является известной безопасной теневой картой, рабочий орган 12 перемещают вниз до достижения им предустановленного расстояния от заготовки или штампа, формируя при этом новую теневую карту (переход в состояние 7 через состояние 5). При этом задают малое расстояние до заготовки, например 3 мм, так чтобы обеспечить возможность продолжения гибки. В предпочтительном варианте осуществления изобретения такое перемещение осуществляют с уменьшенной скоростью до тех пор, пока безопасность не будет обеспечена, после чего скорость подачи может быть увеличена. Изображение, полученное на этом этапе средствами 18, показано на фиг.8с.
В данном состоянии при выключении и повторном включении выключателя подачи рабочий орган 12 изгибает материал (переход из состояния 7 через следующее условие "останова" в состояние 9).
После завершения гибки новую теневую карту сохраняют в стеке теней, а систему управления возвращают в состояние 2 (фиг.12), после чего оператор размещает материал на штампе.
При изгибании второй стороны коробки вертикальная стенка расположена достаточно далеко от освещенной области, чтобы не быть обнаруженной. Если номера гибки не используют, при переходе из состояния 2 средства обработки данных и управления определяют изображение как известную теневую карту, сформированную и сохраненную при гибке первой стороны, и осуществляют переход в состояние 4, при этом рабочий орган с повышенной скоростью подходит к штампу (состояние 6 через условие 13). Также при условии обеспечения безопасности и наличия зазора для перемещения материала (в этом случае такое условие выполняется при отсутствии препятствия рядом с лезвием) перемещение лезвия к материалу может быть пропорционально степени соответствия полученных изображений известному изображению в стеке теней. Это позволяет повысить производительность, поскольку лезвие подводят к материалу до того, как материал полностью выровнен. Гибка может быть выполнена после выключения и повторного нажатия выключателя подачи. Кроме того, гибка может быть начата автоматически (пунктирная линия условия 15) по истечении заданного периода времени и при условии обеспечения безопасности. Если номера гибки используют, вторая сторона должна быть включена в конфигурацию части стека теней, соответствующей второй операции гибки, как изложено выше, если только для гибки второй стороны не используют тот же номер, что и при гибке первой.
Для дальнейшего описания предположим, что оператор отвел рабочий орган 12 на достаточную высоту над материалом. Если расстояние отвода более 25 мм, то, как описано выше, рабочий орган 12 в состоянии 2 удерживают на заданном расстоянии от неизвестных теней. Следовательно, при гибке третьей стороны, если только не были предварительно загружены изображения, вертикальная стенка коробки оказывается не распознанной и, следовательно, между вершиной стенки и рабочим органом 12 сохраняют заданное расстояние (фиг.9а). Однако если рабочий орган отведен на меньшее расстояние, то при включении выключателя подачи система переходит в состояние 5, при этом отпадает необходимость перехода в состояние 2 и следования за материалом.
По готовности оператор выключает и повторно включает выключатель подачи, как описано выше, при этом рабочий орган начинает медленное опускание (при гарантии безопасности возможно быстрое опускание) до достижения предварительно заданного расстояния до заготовки или штампа 14 (состояние 7, как описано выше). В этом случае рабочий орган 12 опускают до тех пор, пока он не окажется на предварительно заданном расстоянии от вертикальной стенки (фиг.9b). При выключении выключателя подачи в данном случае система переходит из состояния 7 в состояние 3 через условие 11, поскольку рабочий орган 12 не находится вблизи штампа 14. При повторном нажатии выключателя подачи рабочий орган 12 медленно опускают, при этом происходит отключение той части изображения, которая будет загораживать рабочий орган 12, что показано на фиг.9 с (снова через состояние 5 в состояние 7). В ходе этого процесса создается теневая карта, которая позднее сохраняется как известная теневая карта.
Поскольку часть изображения, загораживающего рабочий орган 12, отключена, его опускают к заготовке или штампу 14 и размещают на предустановленном расстоянии от них. В этом случае рабочий орган 12 при отсутствии других препятствий размещают на предустановленном расстоянии от плоской части заготовки на штампе 14 (фиг.9с). Затем может быть выполнена гибка, как описано выше, с сохранением в стеке теней известной теневой карты.
После третьего сгибания заготовки рабочий орган 12 отводят, а систему управления возвращают в состояние 2, в котором рабочий орган отслеживает перемещение материала все время, когда выключатель подачи находится во включенном положении. Затем оператор переворачивает материал. Рабочий орган 12 опускают на предустановленное расстояние от верхней точки неизвестного изображения, которым в этом случае являются вертикальные стенки, полученные в ходе первого и второго сгибания заготовки.
Если дважды по очереди выключить и включить выключатель подачи, система управления по очереди будет приведена в состояния 4, 6, 4 и снова 6 для гибки материала. Кроме того, если оператор разместит материал прямо на штампе с удержанием вертикальных стенок перед рабочим органом, это приведет к выполнению условия 3, поскольку полученные в таком положении форма и ориентация совпадут с изображением, сохраненным в стеке теней. При этом не будут нарушены требования к технике безопасности, т.к. на траектории рабочего органа отсутствуют препятствия, так что система управления опускает рабочий орган с высокой скоростью до плоской части материала, а при однократном выключении и повторном включении выключателя подачи система управления проходит состояния 4 и 6 и переходит к гибке материала. Однако если требования к поперечному положению материала и безопасности соблюдены, условие 13 изменяется, в результате чего отпадает необходимость в переходе к состоянию 6 при приближении новой части лезвия к материалу. Вместо перехода к состоянию 6 можно просто замедлить лезвие. Если же выключатель подачи выключен до того, как рабочий орган будет поднят выше вертикальной стенки коробки, или если рабочий орган настроен на подъем на высоту, уступающую высоте вертикальной стенки, то выключение и повторное включение выключателя подачи выполняют только один раз. Однако при использовании номеров гибки четвертая сторона, как описано выше, должна быть включена в конфигурацию части стека теней, соответствующей данной гибке, если только для гибки четвертой стороны не используют номер третьей стороны.
Гибку другой такой же коробки осуществляют быстрее благодаря способности систем распознавать изображения, совпадающие с теневыми картами, сохраненными при работе с первой коробкой. При гибке каждой стороны система распознает получаемое изображение как одну из сохраненных теневых карт и поэтому переходит в состояние 4, при котором рабочий орган быстро подводят к материалу. При этом изготовление всей коробки можно осуществить однократным выключением и повторным включением выключателя подачи для каждой стороны. В предпочтительном варианте осуществления изобретения задают соответствующую максимальную высоту подъема рабочего органа, а также используют режим ожидания подтверждения. Далее согласно условию 15 средства управления подтверждают безопасность проведения гибки и разрешают включить выключатель подачи и удерживать его во включенном положении во время гибки всех сторон следующих коробок. Для обеспечения безопасности оператор может быть обучен удерживать материал определенным образом, а в системе управления можно использовать все упомянутые способы точного выравнивания материала, например уменьшение вибрации, определение положения материала, использование подающих устройств, коррекцию положения и уменьшение интенсивности спеклов.
На фиг.13-15 показаны три других варианта осуществления алгоритмов работы системы в соответствии с настоящим изобретением. Данные варианты являются вариантами системы, описанной на фиг.12, которую можно использовать для их понимания.
Алгоритм работы системы, приведенный на фиг.13, очень похож на алгоритм, приведенный на фиг.12. Основное отличие заключается в том, что по завершении процесса следования за препятствием (состояние 2) при останове рабочего органа (состояние "ожидание команды выключателя подачи") включение выключателя подачи при неизвестной теневой карте и рабочем органе, размещенном на близком расстоянии от материала, приводит к медленному опусканию рабочего органа до тех пор, пока он не окажется на близком расстоянии от штампа, а не к его останову при наличии какого-либо препятствия (т.е. возврату через условие 11 на фиг.12). Можно допустить быстрое перемещение рабочего органа при соблюдении мер безопасности.
На фиг.14 приведен еще один вариант осуществления изобретения, в котором рабочий орган выполнен с возможностью следования за перемещением препятствий без включения выключателя подачи. Система выполнена таким образом, что рабочий орган сопровождает препятствие сначала на первом относительно большом расстоянии, если теневая карта неизвестна (состояние 3), и опускается на относительно близкое расстояние (состояние 4), если теневая карта известна. Если в состоянии 4 включить выключатель подачи и при этом рабочий орган будет размещен на близком расстоянии от штампа, то система позволит выполнить гибку (через условие 9 к условию "Получение подтверждения для выполнения гибки" и к состоянию 6). Если выключатель подачи включить в какое-либо другое время, система переходит в состояние 2, в котором рабочий орган для обеспечения безопасности медленно подводят к материалу (с остановом перед новыми препятствиями и сохранением новых теневых карт) на достаточно близкое расстояние до штампа для начала гибки.
На фиг.15 приведен еще один вариант осуществления изобретения, в котором используют режим следования за препятствием (состояние 2), но не используют сохраненные теневые карты. При этом между рабочим органом и препятствием выдерживают предварительно заданное расстояние. При отсутствии перемещения препятствий рабочий орган останавливают на указанном расстоянии и приводят в состояние 2. В этом состоянии при выключении и повторном включении выключателя подачи осуществляется подача рабочего органа и гибка материала, т.е. переход в состояние 5 (если рабочий орган размещен на близком расстоянии от штампа) или отключение частей рабочего органа, расположенных на близком расстоянии от изображения (состояние 4) с приведением системы в состояние 2 (т.е. следования за препятствиями).
На фиг.1, 10 и 11 представлен еще один аспект данного изобретения. Как описано ранее, гибка стороны коробки, находящейся между двумя вертикальными стенками (фиг.10), несколько затруднена. В предпочтительном варианте осуществления изобретения имеется режим, в котором лезвие может проходить между вертикальными стенками без обязательного подтверждения оператора (условие 13 на фиг.12 лишь приводит к останову новой части рабочего органа на близком расстоянии от материала, если отсутствует подтверждение выравнивания материала или не обеспечена безопасность). Однако, в этом случае, если заготовка не выровнена вдоль штампа 14, рабочий орган 12 может ударить по одной из вертикальных стенок. Согласно еще одному аспекту изобретения гибочный пресс имеет устройство 66 для определения положения материала, так размещенное по отношению к фиксаторам 15 подающего устройства или к точке выравнивания материала, что оно позволяет определить, осуществлено ли поперечное выравнивание заготовки на штампе.
Устройство для определения положения материала может содержать один или несколько индуктивных датчиков, которыми можно определить, закрывает ли заготовка только часть этого устройства или все устройство. Затем по выходному сигналу устройства перед гибкой определяют, выровнена ли заготовка.
В качестве варианта, как описано выше, можно использовать фиксаторы подающего устройства или пазы в подающем устройстве, в которые вставляют материал. В таком случае при неверном размещении материала в пазе направляющей подающего устройства отсутствует точное совпадение изображений, что приводит к фиксированию ошибки размещения материала.
Возможные варианты, очевидные для специалиста, не выходят за пределы объема настоящего изобретения.
Например, как описано в WO 03/1047111, данная система может быть выполнена со светоизлучающими или светоприемными средствами, установленными неподвижно относительно рабочего органа или штампа.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАЩИТНАЯ СИСТЕМА | 2003 |
|
RU2372552C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПАЙКИ ОПЛАВЛЕНИЕМ | 2009 |
|
RU2567963C2 |
| СИСТЕМА ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ | 2012 |
|
RU2670417C1 |
| УСТРОЙСТВО, КОТОРОЕ ПОДВЕРГАЕТСЯ ВОЗДЕЙСТВИЮ ПОТОКА ТЕКУЧЕЙ СРЕДЫ | 2010 |
|
RU2519602C2 |
| СВЯЗЫВАНИЕ АНИМАЦИЙ | 2010 |
|
RU2530708C2 |
| МАНИПУЛИРОВАНИЕ ВИРТУАЛЬНЫМ ОБЪЕКТОМ | 2010 |
|
RU2555228C2 |
| СПОСОБ И УСТРОЙСТВО МЕСТНОГО ИЛИ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПРИБОРОМ В ТЕХНОЛОГИЧЕСКОЙ СИСТЕМЕ | 2013 |
|
RU2640672C2 |
| СЕНСОРНОЕ УСТРОЙСТВО | 2004 |
|
RU2335403C2 |
| СТАНДАРТНЫЕ ЖЕСТЫ | 2010 |
|
RU2534941C2 |
| КАРТА ПРИЗНАКОВ УРОЖАЯ ДЛЯ УПРАВЛЕНИЯ ТРАНСПОРТНЫМИ СРЕДСТВАМИ | 2006 |
|
RU2405299C2 |
Изобретение относится к системам управления гибочным прессом и предназначено для использования с оборудованием, имеющим рабочий орган, выполненный с возможностью перемещения по известной траектории. Система управления содержит средства обработки данных и управления, обеспечивающие в первом рабочем режиме расстояние между ведущей кромкой рабочего органа и объектами в диапазоне между минимальным и максимальным значениями. Технический результат заключается в повышении производительности гибочного пресса при применении данной системы управления. 24 з.п. ф-лы, 15 ил.
1. Система управления гибочным прессом, имеющим рабочий орган, выполненный с возможностью перемещения по известной траектории, содержащая средства обнаружения объектов, расположенных на траектории рабочего органа или рядом с ней, отличающаяся тем, что она снабжена средствами определения расстояния между указанными объектами и ведущей кромкой рабочего органа, средствами обработки данных и управления, обеспечивающими в первом рабочем режиме, заключающемся в перемещении рабочего органа, расстояние между ведущей кромкой рабочего органа и объектами, расположенными на его траектории или рядом с ней, в диапазоне между минимальным и максимальным значениями.
2. Система по п.1, отличающаяся тем, что указанные средства обнаружения объектов на траектории рабочего органа или рядом с ней содержат светоизлучающие средства, выполненные с возможностью освещения области около указанной траектории, и светоприемные средства, выполненные с возможностью приема света, прошедшего через указанную область, размещенные таким образом, что обнаруженные объекты отбрасывают тени на светоприемные средства, связанные со средствами обработки данных и средствами управления для определения наличия препятствий в упомянутой области на основе изображений, полученных указанными светоприемными средствами.
3. Система по п.2, отличающаяся тем, что упомянутые средства обработки данных и управления содержат средства запоминания, которые выполнены с возможностью хранения изображений, полученных светоприемными средствами, в качестве известных изображений.
4. Система по п.3, отличающаяся тем, что упомянутые средства обработки данных и управления содержат средства получения известных изображений от внешнего источника.
5. Система по п.4, отличающаяся тем, что указанное максимальное значение задано таким, что рабочий орган и штамп остаются в зоне, контролируемой светоприемными средствами, а указанное минимальное значение выбрано достаточно большим для свободного размещения материала на штампе и удаления с него.
6. Система по п.5, отличающаяся тем, что величину упомянутых максимального и минимального значения изменяют в зависимости от степени соответствия полученного светоприемными средствами изображения известному изображению, сохраненному в упомянутых средствах запоминания.
7. Система по п.5 или 6, отличающаяся тем, что она обеспечивает продолжение работы в первом рабочем режиме при несовпадении изображения, полученное средствами обработки данных и управления, ни с одним из известных изображений.
8. Система по п.7, отличающаяся тем, что она содержит выключатель подачи, при включении которого осуществляется первый рабочий режим перемещения рабочего органа.
9. Система по п.8, отличающаяся тем, что она обеспечивает второй рабочий режим, при котором осуществляется подведение рабочего органа к обрабатываемому материалу на расстояние, менее минимального.
10. Система по п.9, отличающаяся тем, что в упомянутом втором рабочем режиме обеспечивает осуществление подведения рабочего органа к материалу на расстояние, при котором оператор не может вставить между ними пальцы.
11. Система по п.9 или 10, отличающаяся тем, что она обеспечивает переход из первого рабочего режима во второй рабочий режим в случае совпадении части изображения, полученного светоприемными средствами и имеющего форму и ориентацию материала на штампе, с соответствующей частью одного из известных изображений.
12. Система по п.9 или 10, отличающаяся тем, что она обеспечивает переход из первого рабочего режима во второй рабочий режим в случае, если изображение, полученное светоприемными средствами, является одним из указанных известных изображений.
13. Система по п.12, отличающаяся тем, что она обеспечивает переход из первого рабочего режима во второй рабочий режим при выключении и включении оператором указанного выключателя подачи, при этом изображения, полученные средствами обработки данных и управления, используют для создания известного изображения при подводе рабочего органа к штампу во втором рабочем режиме.
14. Система по любому из пп.6-8, 10-12, отличающаяся тем, что она обеспечивает рабочий режим при гибке материала на штампе, в котором перемещение рабочего органа приводит к гибке.
15. Система по п.14, отличающаяся тем, что известное изображение, полученное во втором рабочем режиме, сохранено в средствах запоминания как известное изображение после начала гибки.
16. Система по п.15, отличающаяся тем, что она обеспечивает переход из второго рабочего режима в третий рабочий режим при выключении и повторном включении выключателя подачи.
17. Система по любому из пп.9, 10, 12-14, 13, отличающаяся тем, что она обеспечивает четвертый режим работы, при котором рабочий орган отведен от штампа.
18. Система по п.17, отличающаяся тем, что она имеет выключатель отвода и переходит в четвертый рабочий режим при его включении оператором.
19. Система по любому из пп.3-5, 9, 10, 12-14, отличающаяся тем, что при первом рабочем режиме средствами обработки данных и управления на основе изображений, полученных светоприемным средством, определены зона отвода, размещенная вокруг рабочего органа, так что при обнаружении в ней ближайших к рабочему органу объектов его от них отводят, зона останова, размещенная вокруг зоны отвода, так что при обнаружении в зоне останова ближайших к рабочему органу объектов прекращают его перемещение, и первая зона подвода, размещенная вокруг зоны останова так, что при обнаружении в первой зоне подвода ближайших к рабочему органу объектов его к ним подводят.
20. Система по п.19, отличающаяся тем, что указанными средствами обработки данных и управления определена вторая зона подвода, размещенная вокруг первой зоны подвода, так что при обнаружении во второй зоне подвода ближайших к рабочему органу объектов его к ним подводят с относительно большой скоростью, превышающей скорость перемещения рабочего органа при обнаружении ближайших к рабочему органу объектов в первой зоне подвода.
21. Система по любому из пп.3-5, 9, 10, 12-14, 13, отличающаяся тем, что для обеспечения плавного перемещения рабочего органа его скорость изменяют в зависимости от расстояния между ним и границей области, образованной указанными минимальным и максимальным значениями.
22. Система по любому из пп.3-5, 9, 10, 12-14, 13, отличающаяся тем, что светоизлучающие средства содержат лазерный диод, при этом проходящий через него ток модулируют для получения переменных спекл-структур и улучшения, таким образом, разрешения полученного изображения.
23. Система по п.22, отличающаяся тем, что указанные светоприемные средства содержат экран, на который падает свет, прошедший через указанную область, и который текстурирован для снижения влияния спекл-структур, созданных при помощи лазерного диода.
24. Система по любому из пп.2-5, 9, 10, 12-14, отличающаяся тем, что указанные светоизлучающие средства имеют регулировочные средства, содержащие несколько линейных электроприводов, которые соединены со светоизлучающими средствами и выполнены с возможностью перемещения в направлении, параллельном оси излучаемого света, при этом линейное перемещение любого из них изменяет его направление, а их одновременное перемещение увеличивает или уменьшает оптическое расстояние между светоизлучающими и светоприемными средствами.
25. Система по любому из пп.2-5, 9, 10, 12-14, отличающаяся тем, что средства обработки данных и управления содержат программу, постоянно размещенную в процессоре для цифровой обработки сигналов.
| US 6644080 В2, 11.11.2003 | |||
| Двоичный сумматор | 1976 |
|
SU638960A1 |
| Устройство управления прессом | 1988 |
|
SU1684090A1 |
| Система управления прессом | 1975 |
|
SU566744A1 |

