Настоящее изобретение относится к конструкции, которая при использовании подвергается воздействию потока текучей среды. Более конкретно, но не исключительно, настоящее изобретение относится к устройству аэродинамического профиля, главным образом, летательного аппарата, например, лопасти несущего винта винтокрылого летательного аппарата, например вертолета, или крыла летательного аппарата с неповоротным (жестким) крылом.
Однако настоящее изобретение применимо к другим устройствам аэродинамического профиля, например, воздушным винтам и лопаткам турбин, а в еще в более общем случае - к любому устройству, которое подвергается воздействию потока текучей среды, и требуется изменение геометрии, по меньшей мере, части устройства при использовании для оказания воздействия потока текучей среды.
Например, лопасти несущего винта вертолета имеют основное тело с внешней поверхностью, включающей в себя верхнюю выпуклую поверхность и нижнюю выпуклую поверхность, и переднюю кромку и заднюю кромку, законцовку лопасти и конец комеля. Задняя кромка, в частности, лопасти может иметь присоединенную к ней поверхность управления, например закрылок, положение которой является переменным для воздействия потока текучей среды поверх устройства, например, для улучшения летно-технических характеристик лопасти, во время перехода между зависанием и полетом в направлении вперед. Например, закрылок может быть опущен из его обычного повышенного положения, когда вертолет находится в полете в направлении вперед, в пониженное положение для улучшения летно-технических характеристик в зависании.
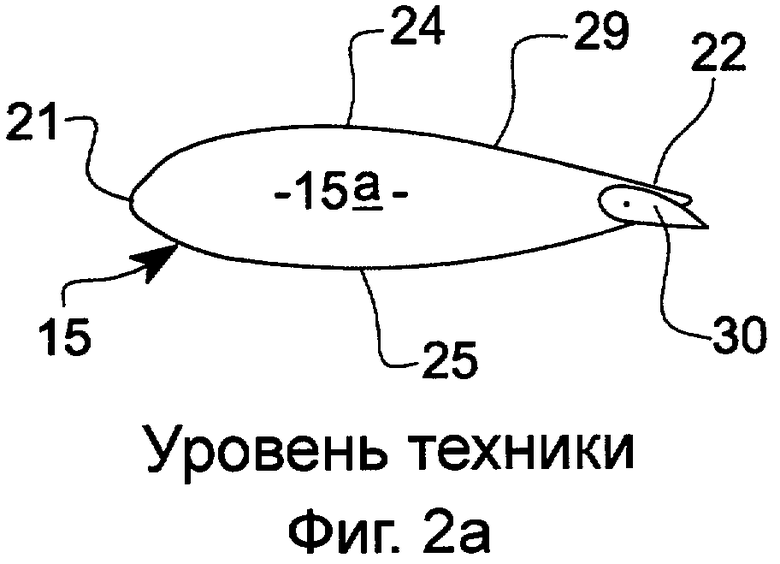
Известны устройства аэродинамического профиля, которые имеют элероны, триммеры и закрылки у задней кромки основного тела аэродинамического профиля, которые обеспечивают поверхности управления воздушным потоком для изменения эффективной выпуклости аэродинамического профиля. Как правило, такие поверхности управления отделены от основного тела аэродинамической поверхности и являются подвижными относительно основного тела аэродинамической поверхности посредством одного или более приводов, которые при движении поверхности управления к требуемому положению относительно основной конструкции аэродинамической поверхности служат для поддержания поверхности управления в этом положении. Пример такой аэродинамической поверхности, соответствующей предшествующему уровню техники, иллюстрируется на фиг.2а. Основное устройство аэродинамической поверхности, указанное ссылочным номером 15, имеет его заднюю кромку 22, поверхность управления, то есть закрылок 30, который является поворотным относительно основного тела 15а конструкции 15 аэродинамической поверхности и подвижным вверх и вниз для изменения эффективной выпуклости аэродинамической поверхности для различных условий полета. Поверхность 30 является поворотной благодаря приводу, который также служит для поддержания положения поверхности 30 управления и, следовательно, эффективной выпуклости в выбранном положении.
Было предложено использовать для аэродинамической поверхности управления устройства бистабильный композитный материал для внешней поверхностной части этого устройства. Геометрия такого материала может быть изменена между одной стабильной геометрией и другой посредством привода. Однако до настоящего времени такие предложения испытывали практические трудности в достижении надежных изменений между бистабильными геометриями, гарантируя в то же самое время, что материал бистабильной внешней поверхностной части способен обеспечить достаточную жесткость (устойчивость) конструкции для противодействия геометрическим искажениям вследствие динамических нагрузок текучей среды, испытываемых при использовании, когда поток текучей среды проходит поверх внешней поверхностной части.
В соответствии с первым аспектом настоящего изобретения обеспечивают устройство, которое при использовании подвергается воздействию потока текучей среды, причем устройство включает в себя внешнюю поверхностную часть, геометрия которой поддается изменению для воздействия потока текучей среды, устройство включает в себя опорную конструкцию, которая поддерживает внешнюю поверхностную часть, опорная конструкция включает в себя рабочий орган из композитного материала, геометрия которой поддается изменению посредством привода между первой стабильной геометрией и второй стабильной геометрией для выполнения изменения в геометрии внешней поверхностной части.
Настоящее изобретение, благодаря использованию композиционного материала с бистабильной геометрией для поддержания рабочего органа внутренней опорной конструкции, а не внешней поверхностной части устройства, обеспечивает более высокую гибкость конструкции обоих для гарантирования надежных изменений в геометрии между первой и второй стабильной геометрией рабочего органа из композитного материала и, следовательно, более надежного выполнения изменения в геометрии внешней поверхностной части, обеспечивая в то же самое время достаточную жесткость для внешней поверхностной части для противодействия геометрическим искажениям вследствие динамических нагрузок текучей среды, испытываемых при использовании, когда поток текучей среды проходит поверх внешней поверхностной части.
Однако настоящее изобретение дает преимущество в том отношении, что рабочий орган из композитного материала устройства поддерживает первую и вторую геометрию без какого-либо влияния от привода и когда геометрия переходит (изменяется) во вторую или первую стабильную геометрию, соответственно.
Так как привод, используемый в настоящем изобретении, не требуется для поддержания геометрии, для поддержания геометрии не требуется мощность и может быть предусмотрен более легкий аппарат, который может требовать меньше компонентов, чем стандартные приводы.
Это имеет контраст со стандартными аэродинамическими поверхностями, например, иллюстрируемыми на фиг.2а, в которых привод служит не только для изменения геометрии аэродинамической поверхности путем перемещения поверхности управления, но для поддержания геометрии аэродинамической поверхности посредством удерживания поверхности управления в выбранном положении.
Хотя может быть использован любой привод, который способен изменять геометрию рабочего органа из композитного материала, например механический привод, пьезоэлектрически возбуждаемый привод или, например, электрический привод, в каждом случае предпочтительно, чтобы привод выполнял изменения между первой и второй стабильными геометриями посредством приложения механической силы к части рабочего органа из композитного материала.
Для гарантирования того, что опорная конструкция обеспечивает достаточную жесткость конструкции для внешней поверхностной части для противодействия геометрическим искажениям вследствие динамических нагрузок текучей среды, испытываемых при использовании, когда поток текучей среды проходит поверх внешней поверхностной части, опорная конструкция предпочтительно находится внутри устройства и включает в себя множество опорных рабочих органов из композитного материала.
В одном примере композитный материал каждого опорного рабочего органа является ламинированным композиционным материалом, включающим в себя множество слоев слоистой структуры из волокон, внедренных в отвержденный материал матрицы, причем, по меньшей мере, один из слоев слоистой структуры включает в себя область из волокон, которые были напряжены до отверждения материала матрицы. Волокна слоев слоистой структуры одного или каждого из рабочих органов из композитного материала, предпочтительно, по существу, совмещены в слое, а любые волокна, которые являются предварительно напряженными волокнами в одном или каждом рабочем органе из композитного материала, предпочтительно проходят в общем направлении для установления поля однонаправленных напряжений во внутренней опорной конструкции.
Благодаря установлению поля однонаправленных напряжений, рабочий орган из композитного материала или рабочие органы из композитного материала будут при изменении от одной стабильной геометрии к другой стабильной геометрии выгибаться, а не искривляться (перекашиваться) так, чтобы достигать максимального изменения в геометрии внешней поверхностной части, поддерживаемой опорной конструкцией.
Таким образом, имеется множество рабочих органов из композитного материала, причем геометрия каждого из рабочих органов может быть изменена силой привода, действующей в одном направлении, а множество рабочих органов вместе могут обеспечивать требуемую жесткость внешней поверхностной части.
Волокна композиционного материала могут быть стекловолокнами или углеродными волокнами, или другими пригодными волокнами, которые может даже еще не разработаны, тогда как материал матрицы предпочтительно является материалом, который не подвержен гигротермальным изменениям, которые могут иметь место при использовании, например, эпоксидной смолы. Опорная конструкция для внешней поверхностной части может включать в себя анкер, в котором захватывается один конец каждого рабочего органа из композитного материала. Анкер для одного или для каждого рабочего органа из композитного материала может быть предусмотрен посредством соответствующего паза в лонжероне устройства и один конец рабочего органа или рабочих органов из композитного материала может быть закреплен в одном или соответствующих пазах посредством требуемого крепежного средства, например клеящего вещества.
В тех случаях, когда внутренняя опорная конструкция включает в себя множество рабочих органов из композитного материала, концы каждого рабочего органа, противоположные первым концам, удерживаемым анкером, могут удерживаться таким образом, чтобы разрешать дифференциальное движение рабочих органов на противоположных концах. Когда противоположные концы не являются жестко закрепленными относительно друг друга (подобно первым концам), рабочие органы из композитного материала не будет оказывать противодействия изменению в геометрии других из рабочих органов из композитного материала.
Где один или каждый рабочий орган из композитного материала включает в себя волокна, которые все, по существу, совмещены с полем однонаправленных напряжений, один или каждый рабочий орган из композитного материала может проходить из анкера в направлении поля направленных напряжений.
Настоящее изобретение, в частности, но не исключительно было разработано для устройства аэродинамической поверхности, которое включает в себя основное тело, которое имеет верхнюю выпуклую поверхность и нижнюю выпуклую поверхность, и переднюю кромку и заднюю кромку. Верхняя и нижняя выпуклые поверхности могут быть обеспечены, по меньшей мере, в части, соответствующими верхней и нижней поверхностными обшивками, причем, по меньшей мере, верхняя поверхностная обшивка или нижняя поверхностная обшивка проходит непрерывно за основное тело для обеспечения, по меньшей мере, части внешней поверхностной части устройства.
Когда внешняя поверхностная часть поддерживается внутренней опорной конструкцией с одной геометрией, соответствующая выходящая верхняя и/или нижняя поверхность устройства аэродинамической поверхности таким образом может иметь первую эффективную выпуклость, а когда внешняя поверхностная часть поддерживается с другой геометрией, соответствующая верхняя и/или нижняя поверхность устройства аэродинамической поверхности может иметь вторую альтернативную эффективную выпуклость.
В отличие от стандартного устройства аэродинамической поверхности, в котором поверхность управления, например, закрылок, поворачивается относительно основного тела аэродинамической поверхности и является, таким образом, отдельным компонентом, соединенным с основным телом, при использовании настоящего изобретения верхняя и/или нижняя поверхностная обшивка основного тела является интегральной частью поверхности управления.
Обшивке необходимо быть достаточно гибкой для разрешения изменений в геометрии внешней поверхностной части.
Желательно, чтобы как верхняя, так и нижняя поверхностные обшивки проходили непрерывно за основное тело, причем каждая обеспечивала соответственно верхнюю внешнюю поверхностную часть и нижнюю внешнюю поверхностную часть устройства, а опорная конструкция была размещена, по меньшей мере, в части, между верхней внешней поверхностной частью, обеспечиваемой верхней поверхностной обшивкой, и нижней поверхностной частью, обеспечиваемой нижней поверхностной обшивкой.
В одном предложении одна или каждая внешняя поверхностная часть, которая поддерживается опорной конструкцией, находится у задней кромки устройства аэродинамической поверхности. Устройство аэродинамической поверхности может быть крылом летательного аппарата или лопастью несущего винта (вертолета), которое проходит вдоль ее размаха, а внешняя поверхностная часть или вместе верхняя и нижняя внешние поверхностные части могут обеспечивать поверхность управления, являющуюся элероном, триммером или закрылком.
Внешняя поверхностная часть или вместе верхняя и нижняя внешние поверхностные части могут, таким образом, проходить вдоль размаха аэродинамической поверхности.
В другом примере устройство аэродинамической поверхности может быть лопаткой турбины или воздушным винтом, который включает скручивание вдоль его размаха.
В соответствии со вторым аспектом настоящего изобретения обеспечивают способ работы летательного аппарата, который обеспечивает устройство первого аспекта настоящего изобретения, которое является устройством аэродинамической поверхности, являясь крылом летательного аппарата или лопастью несущего винта (вертолета), которое проходит, по существу, прямолинейно вдоль его размаха, причем аэродинамическая поверхность включает в себя основное тело, которое имеет верхнюю выпуклую поверхность и нижнюю выпуклую поверхность, и переднюю кромку и заднюю кромку, и в которой верхняя и нижняя выпуклые поверхности обеспечены, по меньшей мере, в части, соответствующими верхней и нижней поверхностными обшивками, причем, по меньшей мере, верхняя поверхностная обшивка или нижняя поверхностная обшивка проходит непрерывно за основное тело для обеспечения, по меньшей мере, части внешней поверхностной части устройства, при этом в полете способ предусматривает выполнение изменения в геометрии верхней и нижней внешних поверхностных частей устройства аэродинамической поверхности для осуществления воздействия воздушного потока поверх устройства аэродинамической поверхности, благодаря работе привода, для изменения (перехода) в соответствии с этим геометрии рабочего органа или рабочих органов из композитного материала внутренней опорной конструкции, которая поддерживает верхнюю и нижнюю внешние поверхностные части, из первой стабильной геометрии во вторую стабильную геометрию.
Если устройство аэродинамической поверхности является лопастью несущего винта винтокрылого летательного аппарата, то изменение в геометрии верхней и нижней внешних поверхностных частей может быть выполнено для разных условий полета; например, одна геометрия может быть адаптирована для зависания (вертолета), а другая - для полета в направлении вперед; например, во время перехода между зависанием и полетом в направлении вперед.
В соответствии с третьим аспектом настоящего изобретения обеспечивают летательный аппарат, имеющий устройство, соответствующее первому аспекту настоящего изобретения, причем это устройство является крылом или лопастью несущего винта, которое проходит, по существу, прямолинейно вдоль его размаха.
Теперь варианты осуществления настоящего изобретения будут описаны со ссылкой на сопроводительные чертежи, где
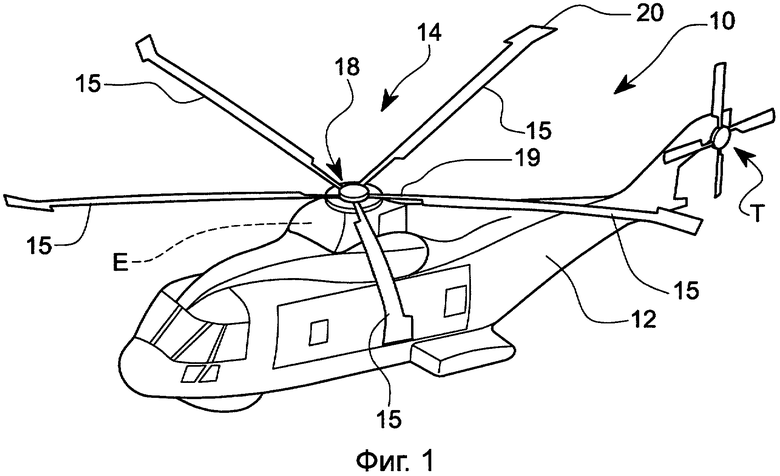
Фиг.1 - иллюстративное изометрическое изображение винтокрылого летательного аппарата, имеющего устройство лопасти несущего винта, соответствующее настоящему изобретению;
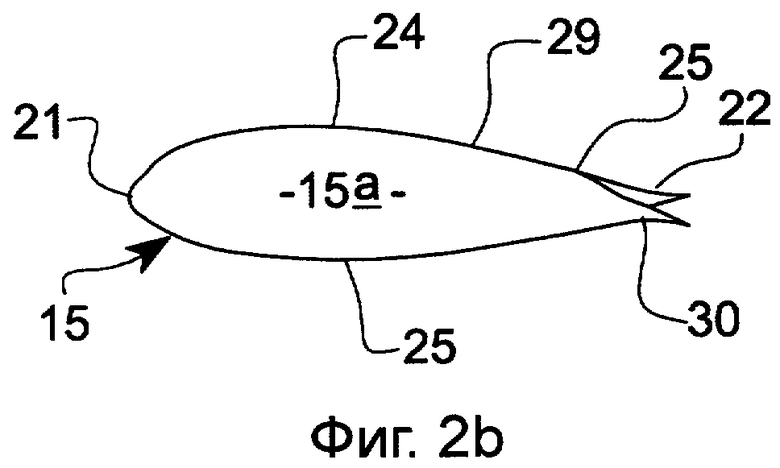
Фиг.2а и фиг.2b - иллюстративные поперечные сечения, соответственно, устройства лопасти несущего винта, соответствующего предшествующему уровню техники, и устройства лопасти несущего винта, соответствующего настоящему изобретению;
Фиг.3а и фиг.3b - иллюстрации альтернативных положений поверхности управления у задней кромки конструкции, иллюстрируемой на фиг.2, достигаемых посредством внутренней опорной конструкции с бистабильными рабочими органами;
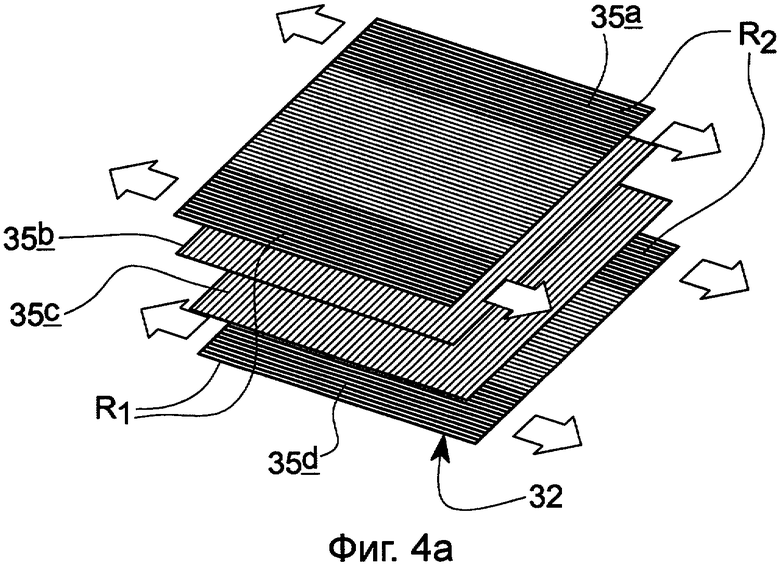
Фиг.4а - иллюстрация этапа в способе предварительного напряжения композиционного материала;
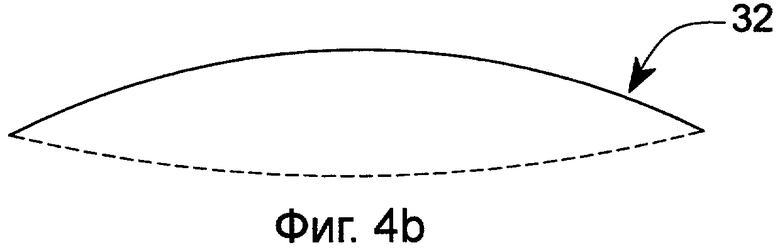
Фиг.4b - иллюстративный вид сбоку бистабильного рабочего органа в двух альтернативных стабильных состояниях;
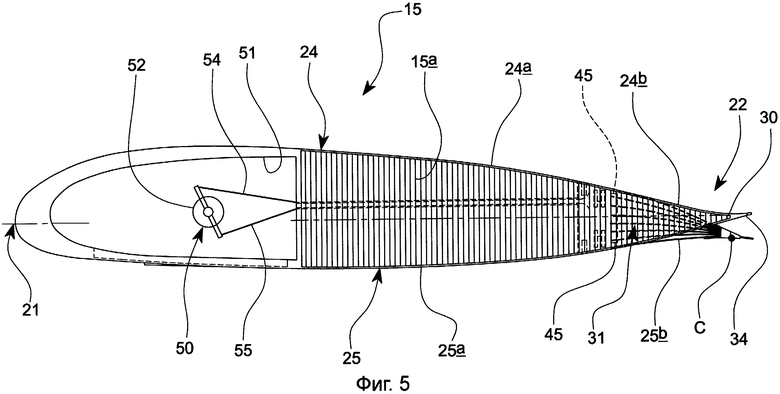
Фиг.5 - более детальное поперечное сечение, подобное поперечному сечению, иллюстрируемому на фиг.2b;
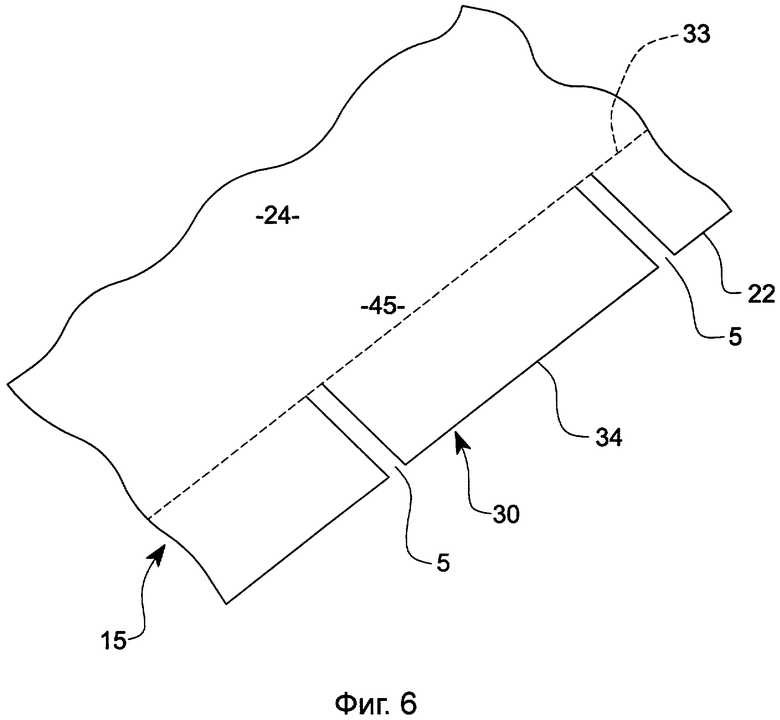
Фиг.6 - иллюстративный вид сверху части лопасти несущего винта, иллюстрируемой на фиг.5.
Как иллюстрируется на фиг.1, винтокрылый летательный аппарат, то есть вертолет 10, включает в себя фюзеляж 12, вмещающий источник мощности, например, двигатель Е для вращения системы 14 основного несущего винта вертолета вокруг, в общем, вертикальной оси А, для генерирования аэродинамической подъемной силы, и как требуется для движения летательного аппарата 10 в воздухе, или для обеспечения возможности зависания летательного аппарата 10. Вертолет этого примера также включает в себя систему Т рулевого винта.
Система 14 основного несущего винта в этом примере включает в себя пять вращающихся крыльев или лопастей 15, одна из которых иллюстрируется в поперечном сечении на фиг.2b. Каждая лопасть 15 несущего винта является, по существу, устройством аэродинамического профиля, которое, по существу, прямолинейно вдоль ее размаха от конца 19 комеля, где лопасть 15 соединена с вращательной шестеренкой 18, которая вращается через коробку передач посредством двигателя Е летательного аппарата, до законцовки 20 лопасти.
Каждая лопасть 15 является устройством аэродинамического профиля, включающим в себя переднюю кромку 21 и заднюю кромку 22, и лопасть 15 генерирует подъемную аэродинамическую силу, когда воздушный поток проходит поверх верхней выпуклой поверхности 24 и нижней выпуклой поверхности 25 между передней и задней кромками 21, 22, как хорошо известно из предшествующего уровня техники.
Обычно, такие устройства 15 аэродинамического профиля включают в себя поверхности управления, которые являются подвижными относительно тела 15а лопасти основного несущего винта для изменения геометрии устройства 15 аэродинамического профиля и, таким образом, воздействия воздушного потока на устройство 15 аэродинамического профиля. На фиг.2а иллюстрируется такая стандартная конструкция, в которой у задней кромки 22 лопасти 15 несущего винта отдельно от тела 15а лопасти основного несущего винта предусмотрена поверхность управления, указанная ссылочным номером 30. Поверхность 30 управления является подвижной между повышенным и пониженным положениями посредством привода, например, двигателя, линейного или роторного гидропривода, или даже пьезоэлектрического типа привода, который предусмотрен внутри тела 15а лопасти основного несущего винта. Таким образом, геометрию или эффективную выпуклость лопасти 15 изменяют путем движения поверхности 30 управления, хотя фактические геометрии тела 15а основного несущего винта и поверхности 30 управления сами не изменяются, а только относительное положение поверхности 30 управления относительно тела 15а основного несущего винта.
Такие поверхности 30 управления являются подвижными для физического воздействия на воздушный поток поверх устройства 15 аэродинамического профиля для соответствия различным условиям полета, таким образом, для оптимизации, например, аэродинамической подъемной силы или скорости, как требуется. Настоящее изобретение было в частности разработано для облегчения изменения геометрии несущего винта 15 при переходе (трансформации), когда вертолет 10 переключается между зависанием (когда поверхность 30 управления может быть понижена для обеспечения максимальной подъемной аэродинамической силы) и полетом в направлении вперед (когда поверхность 30 управления может подниматься для минимизации аэродинамического сопротивления).
Устройство 15 аэродинамического профиля, соответствующее настоящему изобретению, иллюстрируется на фиг.2b. В соответствии с фиг.2b можно видеть, что поверхность 30 управления имеет первое пониженное положение и второе повышенное положение. Однако поверхность 30 управления не отделяется от тела 15а лопасти основного несущего винта. Скорее геометрия верхней и нижней внешних поверхностных частей поверхности 30 управления между показанными пониженным и повышенным положениями.
На фиг.5 можно видеть более подробное изображение устройства 15 аэродинамического профиля. Верхняя выпуклая поверхность 24 устройства 15 аэродинамического профиля обеспечивается посредством верхней поверхностной обшивки 24а, которая в этом примере проходит непрерывно от передней кромки 21 или смежно передней кромке 21 устройства 15 аэродинамического профиля к задней кромке 22 для обеспечения верхней внешней поверхностной части 24b поверхности 30 управления. Нижняя выпуклая поверхность 25 устройства 15 аэродинамического профиля обеспечивается посредством нижней поверхностной обшивки 25а, которая в этом примере проходит непрерывно от передней кромки 21 или смежно передней кромке 21 устройства 15 аэродинамического профиля к задней кромке 22 для обеспечения нижней внешней поверхностной части 25b поверхности 30 управления.
Безусловно, для обеспечения возможности движения поверхности 30 управления между ее повышенным и пониженным положениями, верхняя и нижняя внешние поверхностные части 24b, 25b будет необходимо отделить от смежной поверхности управления вдоль задней кромки 22 или внешней и нижней обшивок 24, 25, которые покрывают смежную основную конструкцию 15b, в направлении хорды, как предлагается на фиг.6 в позиции S (не показано).
Между верхней и нижней внешними поверхностными частями 24b и 25b имеется внутренняя опорная конструкция 31, которая поддерживает верхнюю и нижнюю внешние поверхностные части 24b, 25b поверхности 30 управления, внутренняя опорная конструкция 31 которой осуществляет изменение геометрии верхней и нижней внешних поверхностных частей 24b, 25b между повышенным и пониженным положениями поверхности 30 управления.
Со ссылкой также на фиг.3а и 3b можно видеть, что внутри в поверхности 30 управления внутренняя опорная конструкция 31 включает в себя множество опорных рабочих органов 32. Каждый из этих опорных рабочих органов 32 получен из интеллектуального чувствительного композиционного материала, причем в этом примере внутренняя опорная конструкция 31, включает в себя, по меньшей мере, шесть таких опорных рабочих органов 32, каждый из которых проходит из одного конца, где каждый из опорных рабочих органов 32 соединен с анкером опорной конструкции 31, обеспеченным, благодаря соответствующему пазу 33а в лонжероне 33 тела 15а лопасти основного несущего винта, к противоположному концу, указанному ссылочным номером 32b. Лонжерон 33 предпочтительно проходит во всю длину пролета лопасти 15, но может быть локальным только для поверхности 30 управления, как требуется.
Одни концы опорных рабочих органов 32 могут удерживаться в их соответствующих пазах 33а лонжерона 33 посредством желательного зажимного приспособления, или как в этом примере, одни концы могут быть соединены в пазах 33а посредством соответствующего соединительного вещества, например.
Поверхность 30 управления включает в себя в этом примере рабочий орган 34 задней кромки, который принимает противоположные концы 32b каждого из опорных рабочих органов 32 лонжерону 33 так, как это описано ниже.
Бистабильный (с двумя устойчивыми состояниями) композитный материал опорных рабочих органов 32, естественно и соответственно, принимают одно из двух бистабильных состояний, причем одно из них иллюстрируется на фиг.3а, а другое - на фиг.3b.
Такие композиционные материалы сами по себе, в общем, являются известными.
В настоящем примере рабочие органы 32 получены из множества ламинированных слоев (см.фиг.4а) 35а, 35b, 35с, 35d, которые соединены вместе. Каждый слой 35а, 35b, 35 с, 35d включает в себя волокна, как правило, стекловолокна или углеродного волокна, внедренные в материал матрицы фиксации, который в настоящем примере является эпоксидной смолой, но может быть другим соответствующим поддающимся отверждению материалом, на который не оказывают воздействие гигротермальные изменения, испытываемые при использовании.
Можно видеть, что волокна в каждом из слоев 35а, 35b, 35с, 35d проходят в одном направлении в каждом слое. В этом примере волокна в средних двух слоях 35b, 35с проходят, в общем, ортогонально волокнам в других двух слоях 35а, 35d. Кроме того, волокна в областях внешних двух слоев 35а, 35d в примере, иллюстрируемом в иллюстративных целях на фиг.4а, противоположных краевых областей R1 и R2 являются предварительно напряженными, то есть волокна в этих областях R1 и R2 были напряжены в продольном направлении до внедрения в материал матрицы фиксации.
Благодаря предварительному напряжению волокон во внешних слоях 35а и 35d, которые проходят в общем направлении, этот способ получения устанавливает в материале поле однонаправленных напряжений. Это поле однонаправленных напряжений, когда напряжение высвобождают, как только материал матрицы затвердел, приводит в результате к получению рабочего органа 32 из композитного материала, выбирающего выпуклую конфигурацию, например, как показано сплошными линиями на фиг.4b. Однако конфигурация рабочего органа 32 из композитного материала может быть изменена на выпуклую конфигурацию, показанную на фиг.4b пунктирными линиями, благодаря приложению исполнительной (механической) силы к рабочему органу 32 из композитного материала для побуждения выгибания этого рабочего органа. Поле однонаправленных напряжений гарантирует, что рабочий орган 32 из композитного материала выгибается, как описано, вдоль его длины, а не искривляется, например, с перегибом.
Каждый из шести опорных рабочих органов 32 расположен один поверх другого между внешней и нижней внешними поверхностями 24b, 25b поверхности 30 управления, так что рабочие органы 32 проходят от лонжерона 33 или другого анкера, на котором закреплены их одни концы, причем их соответствующие поля однонаправленных напряжений совмещаются, то есть совмещается направление предварительно напряженных волокон, к рабочему органу 34 задней кромки.
Концевые части верхней и нижней внешних поверхностных частей 24b, 25b, обеспечиваемые верхней и нижней поверхностными обшивками 24, 25 устройства 15 аэродинамического профиля, и противоположные концы рабочих органов 32 из композитного материала принимаются каналом рабочего органа 34 задней кромки. Рабочий орган 34 задней кромки может быть соединен с концевыми частями каждой из верхней и нижней внешних поверхностных частей 24b, 25b, например, посредством соединительного (клеящего) вещества. Противоположные концы 32b каждого из рабочих органов 32 из композитного материала могут удерживаться друг с другом там, где приняты рабочим органом 34 задней кромки, или могут просто удерживаться, будучи захватываемым между верхней и нижней внешними поверхностными частями 24b, 25b. Если противоположные концы рабочих органов 32 из композитного материала удерживают друг друга, то дифференциальное движение или скольжение между противоположными концами 32b рабочих органов 32 в направлениях их удлинения (вытягивания) должно быть разрешено, когда рабочие органы 32 из композитного материала изменяют геометрию между бистабильными конфигурациями, то есть между стабильными геометриями, иллюстрируемыми на фиг.3а и фиг.3b.
Это может быть достигнуто при использовании эластичного соединительного вещества или подобного другого удерживающего средства, которое разрешает такое дифференциальное движение.
Очевидно, что при рабочих органах 32 из композитного материала, изменяющих их геометрии, это будет осуществлять изменение геометрии в каждой из верхней и нижней внешних поверхностных частей 24b, 25b, таким образом, для изменения эффективной выпуклости устройства 15 аэродинамического профиля.
Поверхности 30 управления необходимо двигаться, то есть рабочим органам 32 из композитного материала необходимо двигаться между их бистабильными геометриями, посредством привода, но когда первая и вторая геометрии рабочих органов 32 из композитного материала являются стабильными, то есть материал выгибается между одной геометрией и другой и сохраняет такую геометрию до тех пор, пока не принуждается к выгибанию в противоположном направлении, привод не требуется для поддержания поверхности 30 управления в ее повышенном положении или пониженном положении.
Так как поверхность 30 управления не отделяется от основной конструкции 19, но поверхности 30 управления требуется движение между ее повышенным положением и ее пониженным положением, когда рабочие органы 32 из композитного материала выгибаются между их бистабильными состояниями, верхняя и нижняя поверхностные обшивки 24, 25, по меньшей мере, в области, где поверхность 30 управления является смежной основному телу 15 устройства 15 аэродинамического профиля, то есть области, указанной ссылочным номером 45, нуждаются в согласовании изменений в геометрии и, таким образом, верхняя и нижняя поверхностные обшивки 24, 25 в области 45 должны быть сконструированными для разрешения движения поверхности 30 управления между ее верхним и нижним положениями.
В другом примере материал одной или другой из верхней и нижней внешних поверхностных частей 24b, 25b может быть композиционным материалом с бистабильными характеристиками, подобными опорным рабочим органам 32, но он является обеспечением опорной конструкции рабочих органов 32 из композитного материала, внутри поверхности 30 управления, которая обеспечивает надежность изменения геометрии верхней/нижней внешних поверхностных частей 24b, 25b, и которая обеспечивает необходимую жесткость верхней/нижней внешних поверхностных частей 24b, 25b для противодействия искажению геометрии, когда при использовании поверхность 30 управления испытывает динамические нагрузки текучей среды.
Пример пригодного привода, который может быть предусмотрен для изменения геометрии поверхности 30 управления, теперь будет описан со ссылкой на фиг.5.
Основное тело 15а устройства 15 аэродинамического профиля (которое в этом примере является лопастью 15 несущего винта вертолета) включает в себя внутреннюю сотовую структуру в большей части его объема между передней кромкой 21 и задней кромкой 22. В другом устройстве аэродинамического профиля, например, неподвижном крыле летательного аппарата, крыло может вмещать резервуары для хранения топлива и/или другое оборудование.
В случае лопасти 15 несущего винта, тем не менее, желательно, чтобы лопасть 15 несущего винта была сбалансирована в положении приблизительно 25% длины хорды. В соответствии с этим описываемый и иллюстрируемый привод 50 или, по меньшей мере, компоненты аппарата 50, которые имеют наибольшую массу, вмещаются по направлению к передней кромке 21 лопасти 15 несущего винта в соответствующей полости удаленной по хорде от поверхности 30 управления в таком положении, чтобы не подвергать риску баланс лопасти 15.
Привод 50 может включать в себя двигательный блок 52, например, электродвигатель, гидравлический или пневмогидравлический двигатель или привод, или пьезоэлектрическое устройство, и пару тяговых элементов, например, соединительных гибких кабелей 54, 55. Каждый из гибких кабелей 54, 55 соединен на одном конце с двигательным блоком 52 так, чтобы каждый кабель 54, 55 мог избирательно прикладывать тяговое усилие, благодаря соответствующей работе двигательного блока 52. В другом примере тяговые элементы могут быть жесткими или полужесткими элементами или могут быть частично жесткими и частично гибкими вдоль их длин. Если тяговые элементы являются жесткими, то необходимая сила для перехода рабочих органов 32 из одного стабильного состояния в другое, может быть приложена путем толкания вместо тяги.
Один из кабелей 54, верхний кабель, проходит через первый тракт приведения в действие по направлению к задней кромке 22 устройства 15 аэродинамического профиля, и в таком случае верхний кабель 54 направляется близко под верхней внешней поверхностной частью 24b поверхности 30 управления. Другой кабель 55, нижний кабель, аналогичным образом проходит через второй тракт приведения в действие по направлению к задней кромке 22 устройства 15 аэродинамического профиля, и в таком случае нижний кабель 55 направляется близко над нижней внешней поверхностной частью 25b поверхности 30 управления.
Каждый из кабелей 54, 55 соединен с рабочим органом 34 задней кромки, как показано ссылочным символом С.
Очевидно, что когда двигательный блок 52 работает для приложения тягового усилия к верхнему кабелю 54, механическая сила будет приложена к каждому из рабочих органов 32 из композитного материала, и будет достигнута (получена) стабильная геометрия, иллюстрируемая на фиг.3а, с поверхностью управления в повышенном положении. Благодаря работе двигательного блока 52 для приложения тягового усилия к нижнему кабелю 55, механическая сила будет приложена к каждому из рабочих органов 32 из композитного материала и будет достигнута другая стабильная геометрия, иллюстрируемая на фиг.3b, с поверхностью 30 управления в пониженном положении. Безусловно, в том случае, если прикладывают тяговое усилие двигательного блока 52 к кабелю 54 или к кабелю 55, то другому кабелю 55 или кабелю 54 должно быть разрешено двигаться так, чтобы не противодействовать изменению геометрии опорных рабочих органов 32.
Привод 50 может управляться контроллером, который может быть автоматически чувствительным к условиям работы вертолета 12 и/или органу управления пилота/оператора для управления приводом 50 для выполнения изменения положения в поверхности 30 управления между повышенным и пониженным положениями, благодаря движению опорных рабочих органов 32 между их первой и второй стабильными геометриями.
Многие модификации могут быть сделаны без отклонения от объема настоящего изобретения. Например, конфигурация внутренней опорной конструкции 31, как показано на фиг.3а, 3b и 5, являются исключительно иллюстративной и характерной. Может быть предусмотрено любое число опорных рабочих органов 32, необходимое для выполнения изменения в геометрии верхней и нижней внешних поверхностных частей 24b, 25b поверхности 30 управления, и они могут быть разной длины и конфигурации для иллюстрированных и описанных рабочих органов 32. Соответствующее число рабочих органов 32 может также быть выбрано для достижения необходимой жесткости верхней и нижней внешних поверхностных частей 24b, 25b для противодействия геометрическому искривлению при воздействии динамических нагрузок текучей среды, которые могут в противном случае привести к нежелательному изменению геометрии опорных рабочих органов 32 другому, чем под управлением пилота или контроллера.
Как можно видеть из фиг.6, поверхность 30 управления проходит вдоль части размаха лопасти 15. Где величина размаха поверхности 30 управления велика, привод 50 может иметь более одного верхнего и нижнего кабеля 54, 55 или других тяговых рабочих органов вдоль размаха для приложения необходимых усилий к опорной конструкции для выполнения изменения в геометрии верхней и нижней внешних поверхностных частей 24b, 25b поверхности 30 управления вдоль всей ее длины.
Где величина размаха поверхности 30 управления не велика, так что поверхность управления является триммером, например, как предлагается на фиг.6, может быть использовано множество независимо приводимых в действие триммеров вдоль длины размаха, причем каждый в соответствии с настоящим изобретением имеет переменную геометрию.
Настоящее изобретение было описано, в частности, в отношении изменения геометрии верхней и нижней внешних поверхностных частей 24b, 25b поверхности 30 управления у задней кромки 22 лопасти 15 несущего винта вертолета, но, как будет очевидно из введения к этому описанию, настоящее изобретение имеет намного более широкое применение, включающее в себя поверхности управления у передней кромки устройства 15 аэродинамического профиля, и, в общем, относится к крылу устройства аэродинамического профиля летательного аппарата с невращающимся крылом, например неподвижным (жестким) крылом. Летательный аппарат может управляться пилотом или может быть беспилотным летательным аппаратом.
Устройство аэродинамического профиля не обязательно является крылом 15, но может быть лопастью винта системы Т рулевого винта вертолета 15, или может быть любым другим аэродинамическим или другим устройством, поверх которого при использовании проходит текучая среда, например воздушным винтом или лопаткой турбины.
Вместо или помимо обеспечения рабочего органа 34 задней кромки, при необходимости, аэродинамическая внешняя поверхностная обшивка 24, 25 может проходить вокруг опорной конструкции 31, или противоположные концы 32b опорных рабочих органов 32 из композитного материала могут быть не охвачены у задней кромки 22 устройства 15 аэродинамического профиля какой-либо обшивкой или рабочим органом 34 задней кромки.
Для дополнительного примера настоящее изобретение может быть использовано для изменения конфигурации поверхностной части воздухозаборника или выхлопа, или обтекателя воздушного потока. Настоящее изобретение может быть использовано для устройства, которое является обтекателем транспортного средства, например автотягача, для изменения геометрии внешней поверхностной части обтекателя, при использовании опорной конструкции, имеющей один или более рабочих органов из композитного материала, геометрия которых может изменяться между бистабильными состояниями для оптимальных рабочих характеристик, в зависимости от того, буксирует ли тягач трейлер или нет.
Таким образом, в описанном примере, в котором настоящее изобретение использовано для поверхности 30 управления, имеющей верхнюю внешнюю поверхностную часть 24b и нижнюю внешнюю поверхностную часть 25b, настоящее изобретение может быть использовано для устройства, которое имеет только одну внешнюю поверхностную часть.
Настоящее изобретение применимо не только для вертолетов с одним основным несущим винтом, показанных, например, на фиг.1, но также к вертолетам со спаренными несущими винтами.
Элементы, описанные в вышеприведенном описании или в следующей формуле изобретения или в сопроводительных чертежах, выраженные в их характерных формах или в терминах значений для выполнения описанной функции, или способ или процесс для достижения описанного результата, соответственно, могут отдельно или в любой комбинации таких элементов быть использованы для реализации настоящего изобретения в его различных конфигурациях.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛОПАСТЬ ВОЗДУШНОГО ВИНТА С УПРАВЛЯЕМОЙ ГЕОМЕТРИЕЙ ПРОФИЛЯ | 2018 |
|
RU2701416C1 |
| ЛОПАСТЬ ВОЗДУШНОГО ВИНТА С УПРАВЛЯЕМОЙ ГЕОМЕТРИЕЙ АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ | 2024 |
|
RU2841110C1 |
| УСТРОЙСТВО И СПОСОБ ИЗГОТОВЛЕНИЯ ЛОПАСТИ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА (ВАРИАНТЫ) | 1995 |
|
RU2132288C1 |
| ЛОПАСТЬ ВОЗДУШНОГО ВИНТА С УПРАВЛЯЕМОЙ ГЕОМЕТРИЕЙ ПРОФИЛЯ | 2018 |
|
RU2697168C1 |
| ЛОПАСТЬ АЭРОДИНАМИЧЕСКОЙ МОДЕЛИ ВОЗДУШНОГО ВИНТА И СПОСОБ ЕЕ ИЗГОТОВЛЕНИЯ | 2010 |
|
RU2444716C1 |
| ЛОПАСТЬ ВОЗДУШНОГО ВИНТА С УПРАВЛЯЕМОЙ ГЕОМЕТРИЕЙ ПРОФИЛЯ | 2019 |
|
RU2723567C1 |
| ЛОПАСТЬ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА И СПОСОБ ИЗГОТОВЛЕНИЯ ЛОПАСТИ ИЗ КОМПОЗИЦИОННОГО МАТЕРИАЛА | 2013 |
|
RU2541574C1 |
| ЛОПАСТЬ АЭРОДИНАМИЧЕСКОЙ МОДЕЛИ ВОЗДУШНОГО ВИНТА И СПОСОБ ЕЕ ИЗГОТОВЛЕНИЯ | 2013 |
|
RU2537753C1 |
| УСТРОЙСТВО (ВАРИАНТЫ) И СПОСОБ РАЗМЕТКИ КРОМОК | 1995 |
|
RU2132765C1 |
| ЛОПАСТЬ ВРАЩАЮЩЕГОСЯ КРЫЛА, ВИНТ, СОДЕРЖАЩИЙ, ПО МЕНЬШЕЙ МЕРЕ, ДВЕ ТАКИХ ЛОПАСТИ, И СПОСОБ ВЫПОЛНЕНИЯ ТАКОГО ВИНТА | 2012 |
|
RU2499738C1 |
Изобретение относится к области авиации, в частности к устройствам изменения кривизны аэродинамических поверхностей. Летательный аппарат содержит устройство (15), представляющее аэродинамическую поверхность, подвергающуюся при использовании воздействию потока текучей среды. Устройство (15) включает в себя внешнюю поверхностную часть (24b, 25b), геометрия которой поддается изменению для воздействия потока текучей среды, опорную конструкцию (31), которая поддерживает внешнюю поверхностную часть. Опорная конструкция (31) размещена внутри устройства (15) и включает в себя множество опорных рабочих органов (32) из композитного материала. Геометрия опорной конструкции (31) поддается изменению посредством привода (50) между первой стабильной геометрией и второй стабильной геометрией для выполнения изменения в геометрии внешней поверхностной части (24b, 25b), при этом опорные рабочие органы (32) обеспечивают жесткость конструкции внешней поверхностной части (24b, 25b). Композитный материал конструкции (31) поддерживает первую или вторую стабильные геометрии без влияния от привода (50). Привод (50) выполняет изменения между первым и вторым стабильными геометриями посредством приложения механической силы к части рабочего органа. Обеспечивается достаточная жесткость внешней поверхностной части устройства для противодействия динамическим нагрузкам текучей среды. 3 н. и 12 з.п. ф-лы, 6 ил.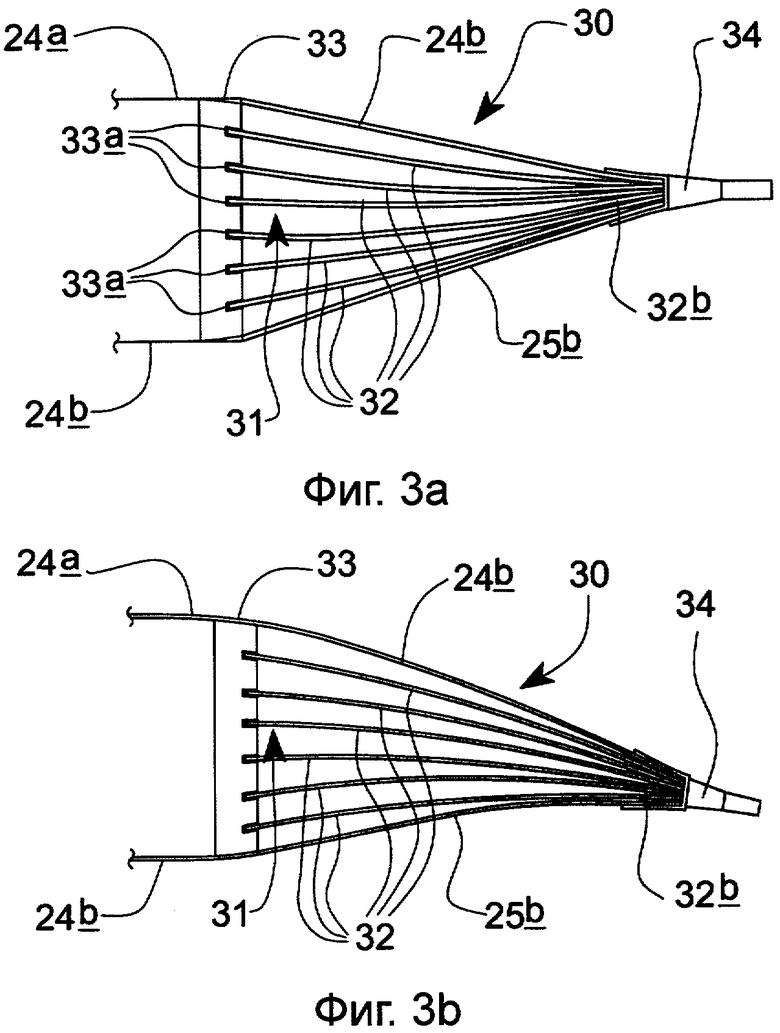
1. Устройство (15), которое при использовании подвергается воздействию потока текучей среды, причем устройство (15) включает в себя внешнюю поверхностную часть (24b, 25b), геометрия которой поддается изменению для воздействия потока текучей среды, опорную конструкцию (31), которая поддерживает внешнюю поверхностную часть, опорная конструкция (31) размещена внутри устройства (15) и включает в себя множество опорных рабочих органов (32) из композитного материала, геометрия опорной конструкции (31) выполнена с возможностью изменения посредством привода (50) между первой стабильной геометрией и второй стабильной геометрией для выполнения изменения в геометрии внешней поверхностной части (24b, 25b), при этом опорные рабочие органы (32) обеспечивают жесткость конструкции внешней поверхностной части (24b, 25b).
2. Устройство по п.1, отличающееся тем, что композитный материал конструкции (31) поддерживает первую или вторую стабильную геометрию без какого-либо влияния от привода (50), когда геометрия изменена во вторую или первую стабильную геометрию соответственно.
3. Устройство по п.1 или п.2, отличающееся тем, что привод (50) выполняет изменения между первым и вторым стабильными геометриями посредством приложения механической силы к части рабочего органа из композитного материала.
4. Устройство по п.1, отличающееся тем, что композитный материал каждого опорного рабочего органа (32) является ламинированным композитным материалом, включающим множество слоев (35а-35d) слоистой структуры из волокон, включенных в отвержденный материал матрицы, причем, по меньшей мере, один из слоев (35а-35d) слоистой структуры включает в себя область (R1, R2) из волокон (35b, 35d), которые были напряжены до отверждения материала матрицы, при этом волокна слоев слоистого материала каждого из опорных рабочих органов (32) из композитного материала, по существу, совмещены в слое, и какие-либо волокна (35b, 35d), которые являются предварительно напряженными волокнами в одном или каждом рабочем органе (32), проходят в общем направлении и устанавливают поле однонаправленных напряжений во внутренней опорной конструкции.
5. Устройство по п.4, отличающееся тем, что волокна являются стекловолокнами или углеродными волокнами, а материалом матрицы является материал, который не подвержен гидротермальным изменениям, такой как эпоксидная смола.
6. Устройство по п.1, отличающееся тем, что композитный материал каждого опорного рабочего органа (32) является ламинированным композитным материалом, включающим множество слоев (35а-35d) слоистой структуры из волокон, включенных в отвержденный материал матрицы, причем, по меньшей мере, один из слоев (35а-35d) слоистой структуры включает в себя область (R1, R2) из волокон (35b, 35d), которые были напряжены до отверждения материала матрицы, при этом волокна слоев слоистого материала каждого из опорных рабочих органов (32) из композитного материала, по существу, совмещены в слое, и какие-либо волокна (35b, 35d), которые являются предварительно напряженными волокнами в одном или каждом рабочем органе (32), проходят в общем направлении и устанавливают поле однонаправленных напряжений во внутренней опорной конструкции, при этом опорная конструкция (31) внешней поверхностной части (24b, 25b) включает в себя анкер (33 а), в котором удерживается один конец каждого рабочего органа (32) из композитного материала, причем противоположные концы каждого опорного рабочего органа удерживаются вместе так, чтобы разрешать дифференциальное движение рабочих органов (32) на противоположных концах.
7. Устройство по п.6, отличающееся тем, что каждый опорный рабочий орган (32) проходит из анкера (33а) в направлении поля однонаправленных напряжений.
8. Устройство по п.1, отличающееся тем, что устройство (15) является устройством аэродинамической поверхности, включающим основное тело (15а), которое имеет верхнюю выпуклую поверхность (24) и нижнюю выпуклую поверхность (25), и переднюю кромку (21) и заднюю кромку (22), причем верхняя и нижняя выпуклые поверхности (24, 25) обеспечены, по меньшей мере, в части, соответствующими верхней и нижней поверхностными обшивками, причем, по меньшей мере, верхняя поверхностная обшивка или нижняя поверхностная обшивка проходит непрерывно за основное тело (15а) для обеспечения, по меньшей мере, части внешней поверхностной части (24b, 25b) устройства (15).
9. Устройство по п.8, отличающееся тем, что как верхняя, так и нижняя поверхностные обшивки (24, 25) проходят непрерывно за основное тело (15а), причем каждая обеспечивает соответственно верхнюю внешнюю поверхностную часть (24b) и нижнюю внешнюю поверхностную часть (25b) устройства (15), а опорная конструкция (31) размещена, по меньшей мере, в части между верхней внешней поверхностной частью (24b), обеспечиваемой верхней поверхностной обшивкой, и нижней поверхностной частью (25b), обеспечиваемой нижней поверхностной обшивкой.
10. Устройство по п.8 или п.9, отличающееся тем, что одна или каждая внешняя поверхностная часть (24b, 25b), которая поддерживается опорной конструкцией (31), находится у задней кромки (22) устройства (15) аэродинамической поверхности.
11. Устройство по п.8, отличающееся тем, что является крылом летательного аппарата или лопастью (15) несущего винта (вертолета), которое проходит, по существу, прямолинейно вдоль ее размаха, а внешняя поверхностная часть или вместе верхняя и нижняя внешние поверхностные части обеспечивают поверхность управления, являющуюся элероном, триммером или закрылком, который проходит вдоль части размаха аэродинамической поверхности.
12. Устройство по п.1, отличающееся тем, что является лопаткой турбины или воздушным винтом, который включает скручивание вдоль его размаха.
13. Способ работы летательного аппарата (10), который включает в себя устройство (15) аэродинамической поверхности по п.11, включающий выполнение в полете изменения в геометрии верхней и нижней внешних поверхностных частей (24b, 25b) устройства (15) аэродинамической поверхности для осуществления воздействия воздушного потока поверх устройства (15) аэродинамической поверхности, благодаря работе привода (50), для изменения (перехода) в соответствии с этим геометрии рабочих органов (32) из композитного материала внутренней опорной конструкции (31), которая поддерживает верхнюю и нижнюю внешние поверхностные части (24b, 25b), из первой стабильной геометрии во вторую стабильную геометрию.
14. Способ по п.13, отличающееся тем, что устройство аэродинамической поверхности является лопастью (15) несущего винта винтокрылого летательного аппарата (10), а изменение в геометрии верхней и нижней внешних поверхностных частей (24b, 25b) выполняют так, чтобы одна геометрия была адаптирована для зависания (вертолета), а другая - для полета в направлении вперед.
15. Летательный аппарат (10), включающий устройство (15) по любому из пп.1-12, отличающийся тем, что устройство (15) является крылом или лопастью несущего винта, которое проходит, по существу, прямолинейно вдоль его размаха.
| US 6220550 B1, 24.04.2001 | |||
| US 7384016 B2, 10.06.2008 | |||
| СПОСОБ ИЗМЕНЕНИЯ ФОРМЫ ПРОФИЛЯ НЕСУЩЕЙ ПОВЕРХНОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 1998 |
|
RU2156207C2 |
| US 7321185 B2, 22.01.2008 | |||

