Предлагаемые технические решения относятся к радиолокации и могут быть использованы для определения местоположения и движения источников излучения сложных сигналов.
Известны способы пеленгации и пеленгаторы для их осуществления (патенты РФ №№2.003.131, 2.006.872, 2.010.258, 2.012.010, 2.134.429, 2.155.352, 2.175.770; Космические траекторные измерения. Под общей редакцией П.А.Агаджанова и др. М.: Сов. радио, 1969, с.244-245; Кинкулькин И.Е. и др. Фазовый метод определения координат. М.: Сов. радио, 1979; Космические радиотехнические комплексы. Под редакцией С.И.Бычкова. М.: Сов. радио, 1967, с.134-137, рис.2.3.9,б, и другие).
Из известных способов и устройств наиболее близкими к предлагаемым являются способ и устройство фазовой пеленгации (Космические радиотехнические комплексы. Под редакцией С.И.Бычкова. М.: Сов. радио, 1967, с.134-137, рис.2.3.9,б), которые и выбраны в качестве базовых объектов.
Согласно известному способу прием сигналов осуществляют на две антенны, удаленные друг от друга на расстояние d. Принятые колебания усиливают и ограничивают, после чего в фазовом различителе (детекторе) производят сравнение фаз колебаний, прошедших два канала. Фазовый сдвиг определяют соотношением
Δϕ=2πd/λ*Cosα,
где α - угол между измерительной базой и направлением на источник излучения сигналов;
d - расстояние между антеннами (измерительная база);
λ - длина волны.
В фазовом пеленгаторе с подвижной (вращающей) базой (рис.2.3.9,б) напряжение рассогласования используется для формирования напряжения, управляющего мотором, связанным через редуктор с антенной системой.
Известные технические решения не обеспечивают достоверного приема и пеленгации сигналов с априорно известной несущей частотой. Это объясняется тем, что в полосу пропускания приемника-пеленгатора попадает большое количество ложных сигналов (помех), не представляющих интереса для радиоконтроля и приходящих с других направлений.
Кроме того, известным техническим решением свойственно противоречие между точностью и однозначностью пеленгации источника излучения сигналов. Действительно, согласно приведенной формуле для повышения точности пеленгации необходимо увеличивать относительный размер измерительной базы d/λ. Однако с увеличением d/λ фазовый сдвиг Δϕ превосходит значение 2π, т.е. наступает неоднозначность отсчета угловой координаты α.
Технической задачей изобретения является повышение достоверности приема и пеленгации полезных сигналов с априорно известной несущей частотой и устранение неоднозначности пеленгации путем подавления ложных сигналов (помех), не представляющих интереса для радиоконтроля и приходящих с других направлений.
Поставленная задача решается тем, что способ пеленгации, основанный, в соответствии с ближайщим аналогом, на приеме сигналов на две антенны и их усилении, при этом одну из антенн вращают, отличается от ближайшего аналога тем, что диаграмму направленности вращающейся антенны выбирают в виде кардиоиды, вращают антенну с кардиоидной диаграммой направленности до совпадения направления нулевого приема с направлением на источник излучения полезных сигналов с априорно известной несущей частотой, делят продетектированное приемной аппаратурой с круговой диаграммой направленности напряжение на продетектированное приемной аппаратурой с кардиоидной диаграммой направленности напряжение, сравнивают напряжение, пропорциональное частному от деления, с пороговым напряжением, при превышении порогового напряжения, что соответствует совпадению направления нулевого приема с направлением на источник излучения полезных сигналов с априорно известной частотой, формируют управляющий импульс, который разрешает измерение несущей частоты принимаемых сигналов, сравнивают код измеренной несущей частоты с кодом априорно известной частоты и при их равенстве прекращают вращение антенны с кардиоидной диаграммой направленности, и фиксируют истинный пеленг на источник излучения полезных сигналов с априорно известной частотой.
Поставленная задача решается тем, что пеленгатор, содержащий, в соответствии с ближайшим аналогом, два приемника с антеннами, одна из которых выполнена вращающейся и связана через блок управления диаграммой направленности с мотором, отличается от ближайшего аналога тем, что он снабжен блоком деления, пороговым блоком, формирователем управляющего импульса, двумя ключами, измерителем частоты, блоком памяти, блоком сравнения кодов и блоком регистрации, причем к выходу вращающейся антенны последовательно подключены блок управления диаграммой направленности, второй приемник, блок деления, второй вход которого через первый приемник соединен с выходом неподвижной антенны, пороговый блок, формирователь управляющего импульса, первый ключ, второй вход которого соединен с вторым выходом первого приемника, измеритель частоты и блок сравнения кодов, второй вход которого соединен с выходом блока памяти, а выход подключен к управляющему входу мотора, к второму выходу блока управления диаграммой направленности последовательно подключены второй ключ, второй вход которого соединен с выходом блока сравнения кодов, и блок регистрации.
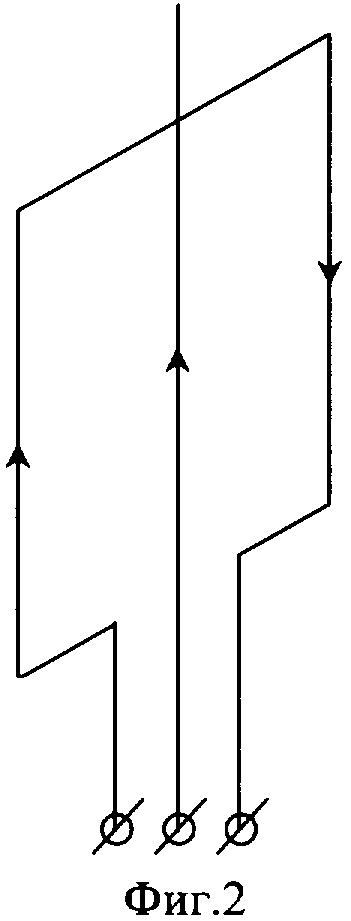
Устройство, реализующее предлагаемый способ, содержит (фиг.1) последовательно включенные приемную антенну 2 с кардиоидной диаграммой направленности, блок 3 управления диаграммой направленности, второй приемник 5, блок 6 деления, второй вход которого через первый приемник 4 соединен с выходом приемной антенны 1 с круговой диаграммой направленности, пороговый блок 7, формирователь 8 управляющего импульса, первый ключ 9, второй вход которого соединен с вторым выходом первого приемника 4, измеритель 10 частоты, блок 12 сравнения кодов, второй вход которого соединен с выходом блока 11 памяти, и мотор 13, выход которого соединен с вторым входом блока, блока 3 управления диаграммой направленности, последовательно подключенные к второму выходу блока 3 управления диаграммой направленности второй ключ 14, второй вход которого соединен с выходом блока 12 сравнения кодов, и блок 15 регистрации.
Предлагаемый способ реализуется следующим образом.
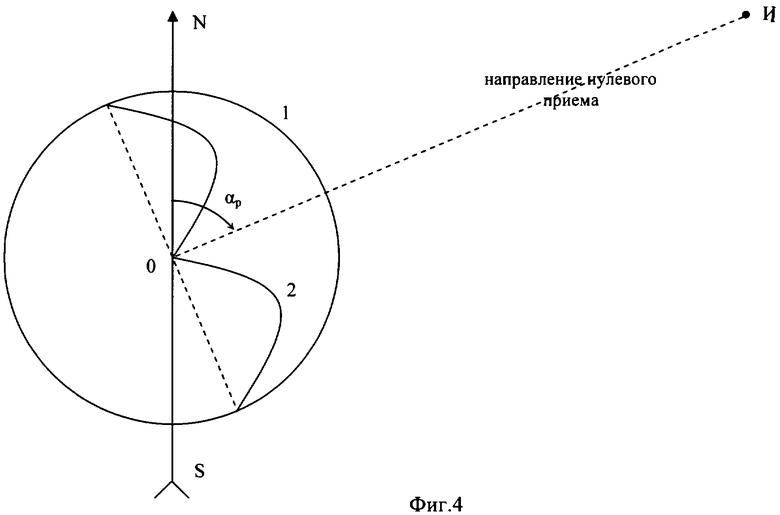
Приемная антенна 1 неподвижна и имеет круговую диаграмму направленности, приемная антенна 2 вращается, связана через блок 3 управления диаграммой направленности (редуктор) с мотором 12 и имеет кардиоидную диаграмму направленности, которая образуется с помощью рамки и вертикального вибратора (фиг.2).
Каждый приемник 4 (5) состоит из последовательно включенных усилителя высокой частоты и амплитудного детектора. Амплитуда принимаемых сигналов на выходе приемника 4 не зависит от направления их прихода из-за круговой диаграммы направленности первой приемной антенны 1 (фиг.4). Амплитуда принимаемых сигналов на выходе приемника 5 зависит от направления их прихода из-за кардиоидной диаграммы направленности второй приемной антенны 2. Огибающие входных сигналов с выходов амплитудных детекторов (первых выходов приемников 4 и 5) поступают на два входа блока 6 деления соответственно.
Для осуществления селекции полезных сигналов по направлению при помощи мотора 12 и блока 3 управления диаграммой направленности кардиоидную диаграмму направленности приемной антенны 2 вращают до совмещения нулевого провала с направлением прихода сигналов (фиг.4). Амплитуда сигналов с этого направления на выходе приемника 5 близка к нулю, поэтому на выходе блока 6 деления, осуществляющего деление амплитуды сигнала с выхода приемника 4 на амплитуду сигнала с выхода приемника 5, в этот момент времени напряжение будет максимальным.
Величину порога выставляют так, чтобы пороговый блок 7 срабатывал только от сигналов, приходящих с нулевого направления.
При срабатывании порогового блока 7 формирователь 8 вырабатывает импульс, который поступает на управляющий вход ключа 9, открывая его. В исходном состоянии ключи 9 и 14 всегда закрыты.
Высокочастотный сигнал со второго выхода первого приемника 4 (с выхода усилителя высокой частоты) через открытый ключ 9 поступает на вход измерителя 10 частоты. Код измеренной несущей частоты принимаемых сигналов поступает на первый вход блока 12 сравнения кодов, на второй вход которого поступает код априорно известной частоты, предварительно записанный в блок 11 памяти.
Если коды указанных частот равны, то блок 12 сравнения кодов формирует управляющий импульс, который поступает на управляющий вход мотора 13, останавливая его, и на управляющий вход ключа 14, открывая его.
При этом значение угловой координаты αp, определяющее направление на источник излучения полезных сигналов (истинный пеленг), через открытый ключ 14 поступает на вход блока 15 регистрации, где и фиксируется.
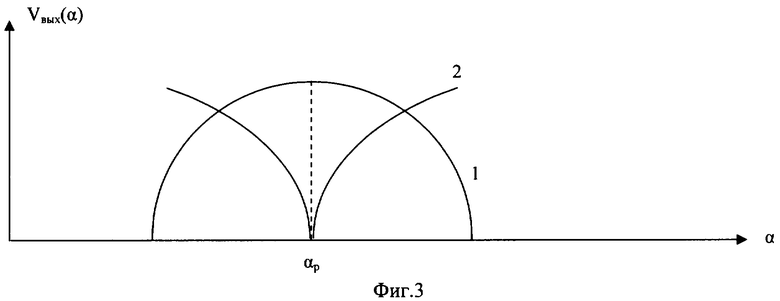
Зависимость выходных напряжений Uвых(α) приемников 4 и 5 от направления прихода электромагнитных волн представляет собой пеленгационные характеристики (фиг.3).
Приемная антенна 2 обладает высокой пеленгационной чувствительностью, которая представляет собой крутизну пеленгационной характеристики в направлении нулевого приема

но низким отношением сигнал/шум.
Совместное использование двух антенн 1 и 2 с круговой и кардиоидной диаграммами направленности устраняют этот недостаток, сохраняя достоинство.
Таким образом, предлагаемые технические решения по сравнению с базовыми объектами обеспечивают повышение достоверности приема и пеленгации полезных сигналов с априорно известной несущей частотой и устранение неоднозначности пеленгации. Это достигается повышением отношения сигнал/шум при использовании антенны с кардиоидной диаграммой направленности, обладающей высокой пеленгационной чувствительностью, подавлением ложных сигналов (помех), не представляющих интереса для радиоконтроля и приходящих с других направлений, и измерением несущей частоты принимаемых сигналов при максимальном отношении сигнал/шум.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАССЫ И ГЛУБИНЫ ПРОКЛАДКИ ПОДВОДНОГО КАБЕЛЯ | 2006 |
|
RU2330310C1 |
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ И ФАЗОВЫЙ ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2290658C1 |
| ПЕЛЕНГАТОР | 2001 |
|
RU2190235C1 |
| СПОСОБ ПЕЛЕНГАЦИИ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2386977C1 |
| ПРОТИВОУГОННАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2001 |
|
RU2186698C1 |
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ И ФАЗОВЫЙ ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2435171C1 |
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ | 2010 |
|
RU2429500C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЭПИЦЕНТРА ОЖИДАЕМОГО ЗЕМЛЕТРЯСЕНИЯ | 2009 |
|
RU2423730C2 |
| КОДОВЫЙ ЗАМОК ДЛЯ КОНТЕЙНЕРОВ | 2001 |
|
RU2186919C1 |
| ПРОТИВОУГОННАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2243912C1 |
Предлагаемое изобретение относится к радиолокации и может быть использовано для определения местоположения и движения источников излучения сложных сигналов. Достигаемым техническим результатом изобретения является повышение достоверности приема и пеленгации полезных сигналов с априорно известной несущей частотой и устранение неоднозначности пеленгации путем подавления ложных сигналов (помех), не представляющих интереса для радиоконтроля и приходящих с других направлений, при этом заявленное устройство содержит приемную антенну с круговой диаграммой направленности, приемную антенну с кардиоидной диаграммой направленности, блок управления диаграммой направленности, первый и второй приемники, блок деления, пороговый блок, формирователь управляющего импульса, первый и второй ключи, измеритель частоты, блок памяти, блок сравнения кодов, мотор и блок регистрации. 4 ил.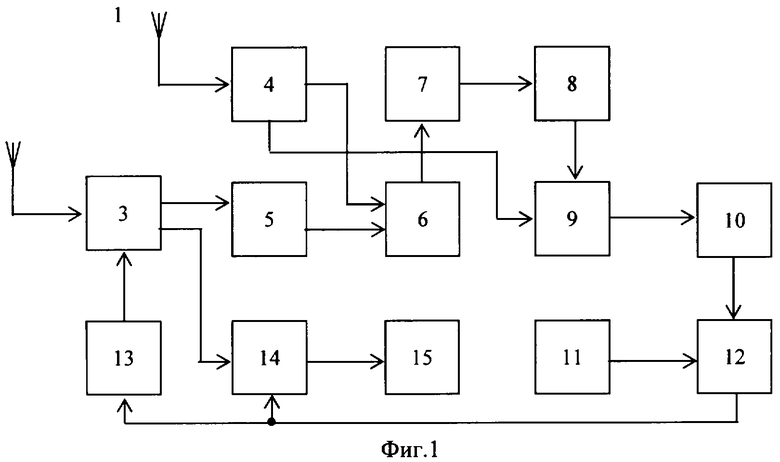
Пеленгатор, содержащий два приемника с антеннами, одна из которых выполнена вращающейся и связана через блок управления диаграммой направленности с мотором, отличающийся тем, что он снабжен блоком деления, пороговым блоком, формирователем управляющего импульса, двумя ключами, измерителем частоты, блоком памяти, блоком сравнения кодов и блоком регистрации, причем к выходу вращающейся антенны последовательно подключены блок управления диаграммой направленности, второй приемник, блок деления, второй вход которого через первый приемник соединен с выходом неподвижной антенны с круговой диаграммой направленности, пороговый блок, формирователь управляющего импульса, первый ключ, второй вход которого соединен с вторым выходом первого приемника, измеритель частоты и блок сравнения кодов, второй вход которого соединен с выходом блока памяти, а выход подключен к управляющему входу мотора, к второму выходу блока управления диаграммой направленности последовательно подключены второй ключ, второй вход которого соединен с выходом блока сравнения кодов, и блок регистрации.
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РАБОТЫ РАДИОСТАНЦИЙ С ПСЕВДОСЛУЧАЙНОЙ ПЕРЕСТРОЙКОЙ РАБОЧЕЙ ЧАСТОТЫ | 1998 |
|
RU2161863C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РАБОТЫ РАДИОСТАНЦИЙ С ПСЕВДОСЛУЧАЙНОЙ ПЕРЕСТРОЙКОЙ РАБОЧЕЙ ЧАСТОТЫ | 2004 |
|
RU2275744C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ МЕСТА РАЗРЫВА ТРУБОПРОВОДА | 2003 |
|
RU2244869C1 |
| АППАРАТ ДЛЯ ВЫКЛАДКИ ОТПЕЧАТАННЫХ ЛИСТОВ В ПЛОСКИХ СКОРОПЕЧАТНЫХ МАШИНАХ | 1929 |
|
SU19230A1 |
| УСТРОЙСТВО ДЛЯ ПРИВЕДЕНИЯ СУДНА В ДВИЖЕНИЕ | 1934 |
|
SU39601A1 |
| US 6903685 В1, 07.06.2005. | |||

