Заявленные изобретения относятся к системам сенсорного ввода информации в компьютер и могут быть использованы в составе операторских пультов управления, системах медицинского и военного назначения.
Оптоэлектронная сенсорная панель, устанавливаемая в непосредственной близости от экрана CRT или LCD видеомонитора, является хорошо известным устройством ввода, используемым для управления компьютером. Данная панель формирует в непосредственной близости от экрана видеомонитора сетку инфракрасных лучей, выступающих в качестве детекторных лучей и обеспечивающих получение чувствительной области сенсорной панели. Касание оператором, например, отображаемой на экране видеомонитора «клавиши» приводит к прерыванию одного или более детекторных лучей по каждой из координатных осей, идентификация которых позволяет оценить местоположение касания сенсорной панели и соответственно активировать названную «клавишу».
Эффективное использование сенсорной панели в значительной мере определяется реализованной в ней адаптивностью, например адаптивностью в отношении разрешающей способности, потребления тока и другими ее видами. Важным видом адаптивности сенсорной панели является адаптивность формируемых ею координат. Так, например, совместное использование сенсорной панели и видеомонитора предполагает установку однозначного соответствия между координатами сенсорной панели и дисплейными координатами видеомонитора. Традиционно с этой целью, до начала интерактивного взаимодействия оператора с сенсорной системой, выполняют калибровку сенсорной панели.
Известен способ для автоматизированной калибровки сенсорной панели в соответствии с патентом US 4710758 [1], заключающийся в связывании координат чувствительной области с координатами экрана видеомонитора путем вычисления коэффициентов матрицы преобразования координат касания сенсорного экрана в координаты экрана видеомонитора на основе одного или более касаний сенсорной панели на предварительно определенных позициях экрана видеомонитора.
Наиболее близким по технической сущности к заявляемым способам является способ для калибровки видеомонитора с сенсорной панелью в соответствии с патентом US 5751276 [2], заключающийся в связывании координат чувствительной области с координатами экрана видеомонитора. Связывание координат выполняют путем вычисления коэффициентов матрицы преобразования координат касания сенсорной панели в координаты экрана видеомонитора так же, как и для предыдущего технического решения, на основе одного или более касаний сенсорной панели на предварительно определенных позициях экрана видеомонитора.
Известно устройство ввода с сенсорной панелью в соответствии с патентом US 4689446 [3]. Сенсорная панель включает расположенные по краям множество пар излучателей и приемников, активируемых для формирования сетки детекторных лучей, обеспечивающих получение чувствительной области.
Наиболее близким по совокупности существенных признаков к заявляемой системе является оптоэлектронная сенсорная система в соответствии с патентом US 6429857 [4], которая включает сенсорную панель, содержащую множество излучателей, размещенных по краям сенсорной панели, и множество приемников, размещенных по краям сенсорной панели напротив названных излучателей, и процессор для управляемой активации названного множества излучателей и управляемой активации названного множества приемников для формирования сетки детекторных лучей, обеспечивающих получение чувствительной области.
Недостатком всех известных объектов [1, 2, 3, 4] является высокое время отклика сенсорной системы и высокие требования к ее вычислительным ресурсам, обусловленные необходимостью выполнения, в процессе интерактивного взаимодействия, преобразования координат каждого отдельного касания сенсорной панели в координаты экрана видеомонитора. Данную процедуру выполняют на основе предварительно определяемой матрицы преобразования координат, которая и предполагает выполнение операций умножения, требующих значительных временных затрат и наличия в сенсорной панели соответствующих вычислительных ресурсов. Данный недостаток обусловлен низкой адаптивностью формируемых сенсорной панелью координат касания и возникает вследствие того, что ее чувствительная область жестко связана с формируемой сенсорной панелью сеткой детекторных лучей. В соответствии с чем связывание координат сенсорной панели с координатами экрана видеомонитора, совместно с которым он используется, выполняют на основе процедуры калибровки сенсорной панели.
Целью заявляемых изобретений является снижения времени отклика оптоэлектронной сенсорной панели и снижение требований к ее вычислительным ресурсам за счет обеспечения получения требуемой адаптивности формируемых сенсорной панелью координат касания.
Поставленная цель достигается тем, что в способе получения адаптивной оптоэлектронной сенсорной панели, заключающемся в обеспечении требуемой адаптации координат сенсорной панели,
- предварительно оценивают местоположения N (N=1, 2, …) касаний сенсорной панели соответственно на N (N=1, 2, …) предварительно определяемых позициях экрана видеомонитора на основе формирования первой сетки детекторных лучей, включающей М (М=1, 2, 3, …) наборов детекторных лучей, детекторные лучи каждого из которых упорядочены в соответствии с первым пространственным шаблоном,
- затем конфигурируют вторую сетку детекторных лучей, включающую, по крайней мере, один набор детекторных лучей, упорядоченных в соответствии со вторым пространственным шаблоном на основе оценивания названных местоположений N (N=1, 2, …) касаний сенсорной панели, и
- координаты второй сетки детекторных лучей связывают с координатами названной чувствительной области сенсорной панели.
Причем местоположения касаний сенсорной панели могут быть оценены посредством получения относительных координат названных касаний.
Кроме того, координаты второй сетки детекторных лучей могут связываться с координатами названной чувствительной области сенсорной панели посредством вычисления коэффициентов матрицы преобразования координат названной второй сетки детекторных лучей в координаты названной чувствительной области.
В другом варианте реализации способа получения адаптивной оптоэлектронной сенсорной панели,
- после распознавания касания сенсорной панели на основе формирования сетки детекторных лучей,
- названную сетку детекторных лучей реконфигурируют относительно предварительно определяемой чувствительной области сенсорной панели и
- координаты реконфигурированной сетки детекторных лучей связывают с координатами названной чувствительной области.
Причем координаты реконфигурированной сетки детекторных лучей связывают с координатами названной чувствительной области сенсорной панели на основе предварительно определяемой матрицы преобразования координат.
В еще одном варианте реализации способа получения адаптивной оптоэлектронной сенсорной панели,
- первоначально сетку детекторных лучей сенсорной панели конфигурируют относительно предварительно определяемой чувствительной области сенсорной панели,
- после чего координаты конфигурированной сетки детекторных лучей связывают с координатами названной чувствительной области.
Причем координаты конфигурированной сетки детекторных лучей связывают с координатами названной чувствительной области сенсорной панели на основе предварительно определяемой матрицы преобразования координат.
Поставленная цель также достигается тем, что в оптоэлектронной сенсорной системе, содержащей
- оптоэлектронную сенсорную панель со множеством излучателей, размещенных по краям сенсорной панели, и множеством приемников, размещенных по краям сенсорной панели напротив названных излучателей, и процессор для управляемой активации названного множества излучателей и управляемой активации названного множества приемников для формирования сетки детекторных лучей, обеспечивающих получение чувствительной области сенсорной панели,
- процессор выполнен с возможностью конфигурирования сетки детекторных лучей относительно предварительно определяемой чувствительной области сенсорной панели и связывания координат названной сетки детекторных лучей с координатами названной чувствительной области.
Все заявленные варианты реализации способа для обеспечения получения адаптивной оптоэлектронной сенсорной панели и система для их реализации решают единую задачу - снижение времени отклика сенсорной панели и снижение требований к ее вычислительным ресурсам за счет обеспечения адаптации формируемых сенсорной панелью координат.
Все известные объекты [1, 2, 3, 4] решают задачу адаптации координат сенсорной панели традиционным путем, то есть посредством предварительной, выполняемой до начала интерактивного взаимодействия калибровки сенсорной панели.
Заявленное техническое решение позволяет сократить время отклика оптоэлектронной сенсорной панели за счет реализации ее чувствительной области адаптивной, то есть обеспечения возможности изменения ее пространственного местоположения относительно сенсорной панели. Причем названную адаптацию реализуют на основе двухэтапной схемы. Грубую адаптацию выполняют посредством конфигурирования сетки детекторных лучей относительно предварительно определяемой чувствительной области сенсорной панели. Соответственно уточняющую адаптацию обеспечивают посредством связывания координат конфигурированной сетки детекторных лучей с координатами названной чувствительной области сенсорной панели.
Технических решений с заявленной совокупностью признаков, обеспечивающих получение адаптивной чувствительной панели, в патентной и научно-технической литературе не обнаружено, что позволяет сделать вывод о соответствии заявленных технических решений критерию изобретательский уровень.
На фиг.1 представлена схема адаптации сенсорной панели к экрану видеомонитора;
на фиг.2 - схемотехническая реализация оптоэлектронной сенсорной панели;
на фиг.3 - схема распознавания касания сенсорной панели на основе формирования одной сетки детекторных лучей;
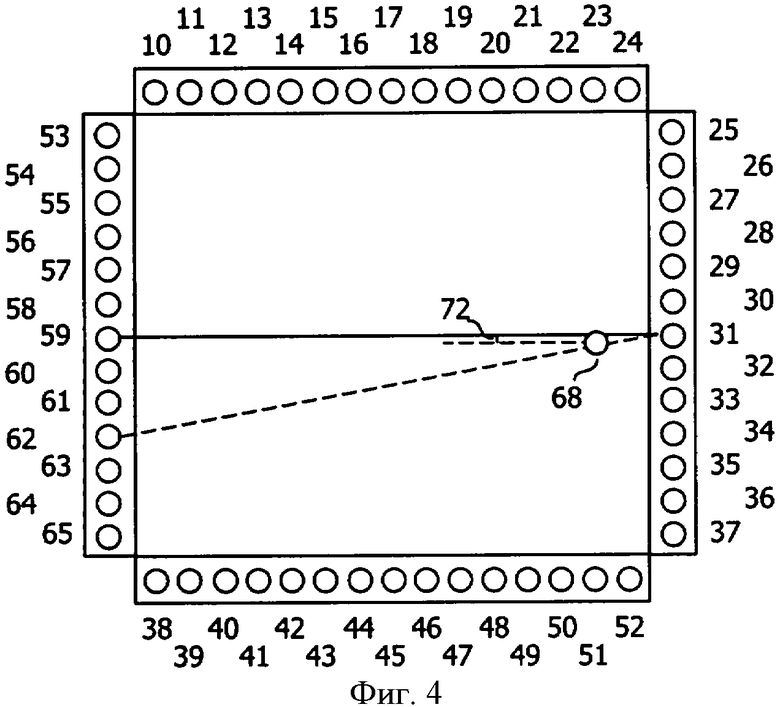
на фиг.4 - схема оценивания местоположения касания сенсорной панели;
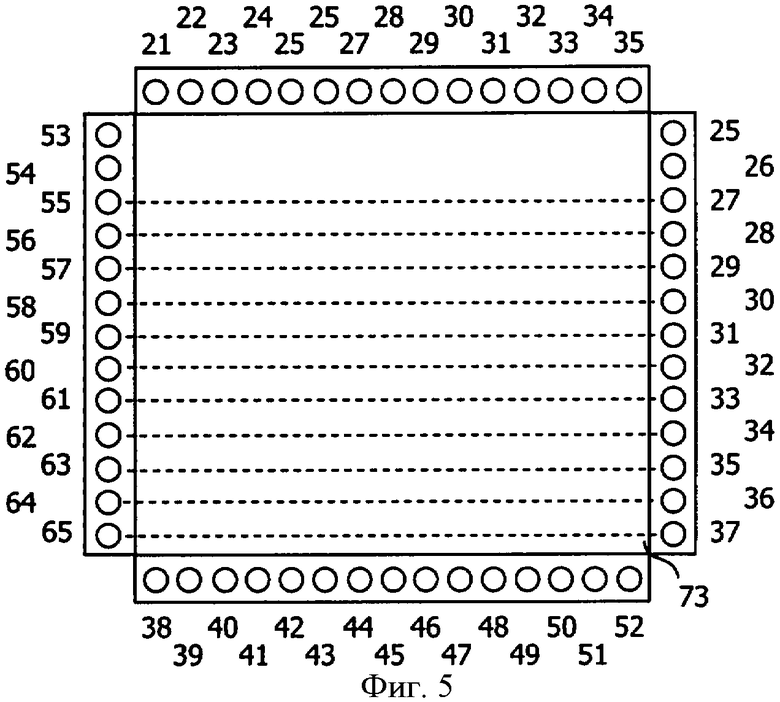
на фиг.5 - пример конфигурирования сетки детекторных лучей сенсорной панели, обеспечивающего смещение ее координатной сетки;
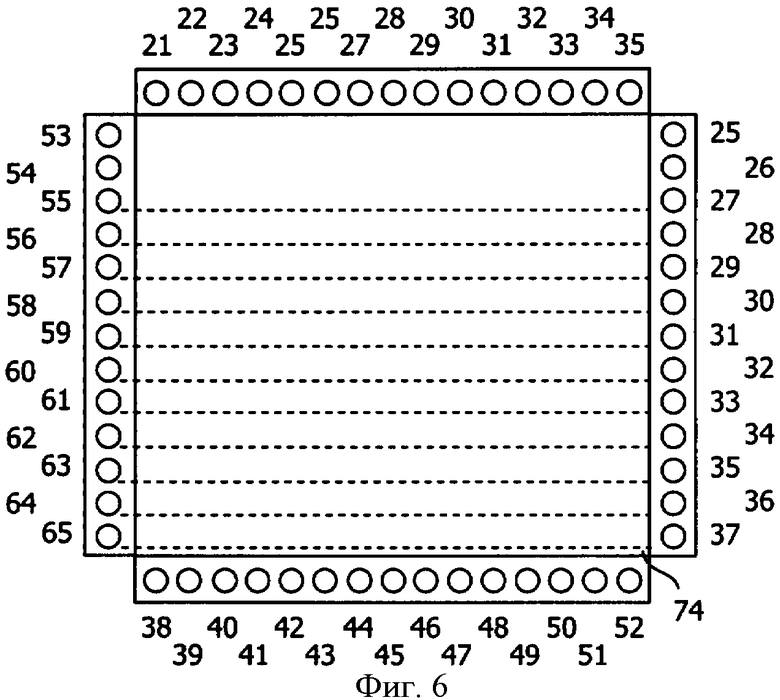
на фиг.6 - пример получения координатной сетки чувствительной области, характеризующейся смещением относительно конфигурированной сетки детекторных лучей;
на фиг.7 - пример получения координатной сетки чувствительной области, характеризующейся поворотом относительно центра сенсорной панели;
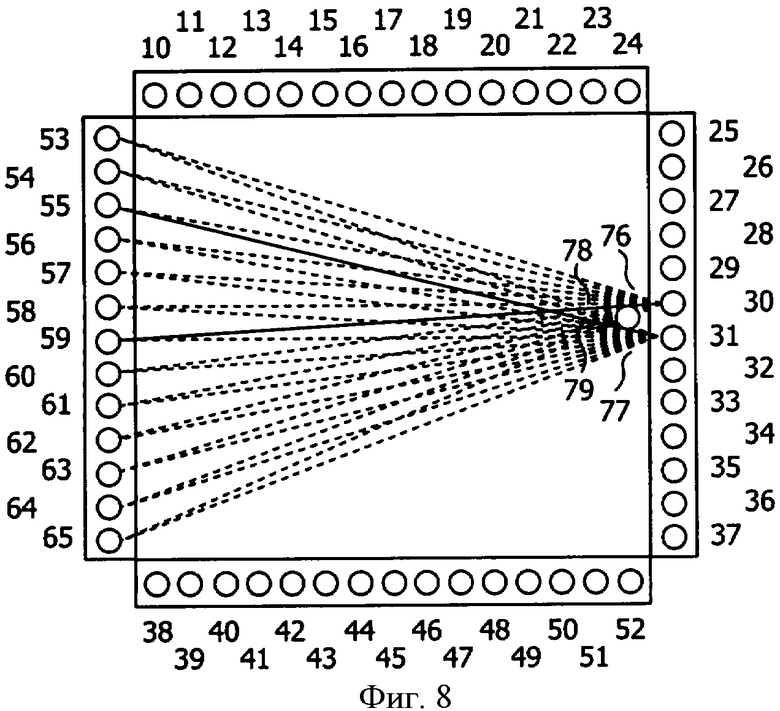
на фиг.8 - схема распознавания касания сенсорной панели на основе формирования двух наборов детекторных лучей.
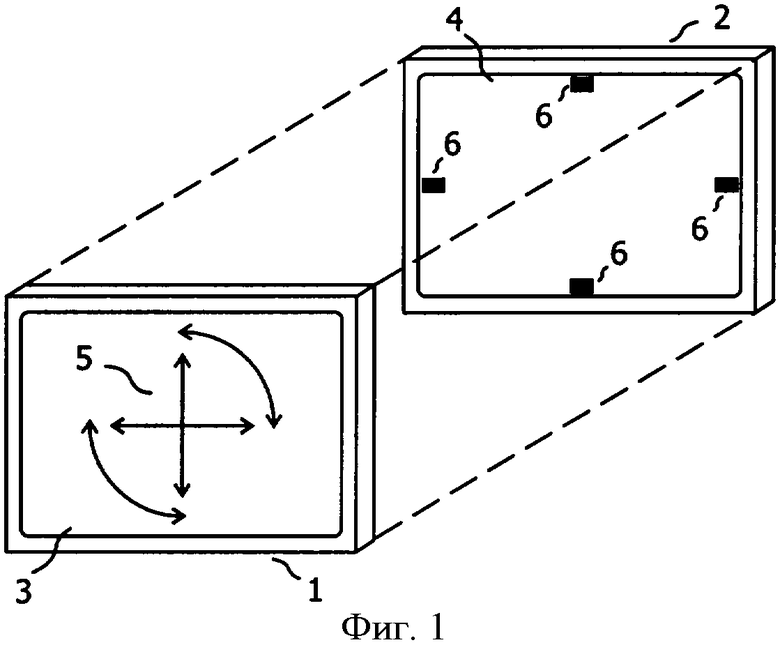
На фиг.1 представлена схема совместного использования сенсорной панели 1 и видеомонитора 2, иллюстрирующая, что при совмещении чувствительной области 3 сенсорной панели 1 с экраном 4 видеомонитора 2 имеют место рассогласования 5, выражающиеся в смещении и повороте их друг относительно друга. Как было отмечено выше, устранение данных рассогласований обеспечивает процедура адаптации сенсорной панели к видеомонитору, заключающаяся в калибровке сенсорной панели на основе одного или более касаний сенсорной панели на предварительно определенных позициях 6 экрана видеомонитора. В результате выполнения процедуры калибровки получают матрицу преобразования координат касаний сенсорной панели в координаты экрана видеомонитора. Выражение, реализующее преобразование координат касаний сенсорной панели в экранные координаты видеомонитора, имеет следующий вид:

где:
XDS и YDS - координаты экрана видеомонитора соответственно по х- и у-координатным осям;
PGX и PGY - координаты касания сенсорной панели соответственно по х- и у-координатным осям;
φ - угол поворота сенсорной панели относительно экрана видеомонитора;
XG и YG - смещение сенсорной панели относительно экрана видеомонитора соответственно по х- и у-координатным осям.
Как следует из выражения (1), отражающего наиболее общий случай, характеризующийся смещением и поворотом сенсорной панели относительно экрана координат видеомонитора, процедура преобразования координат включает четыре операции умножения и четыре операции сложения. Причем, если операция сложения может быть выполнена процессорными средствами сенсорной панели за один или два вычислительных цикла, то операция умножения предполагает выполнение в десятки раз большего, по отношению к операции сложения, количества вычислительных циклов.
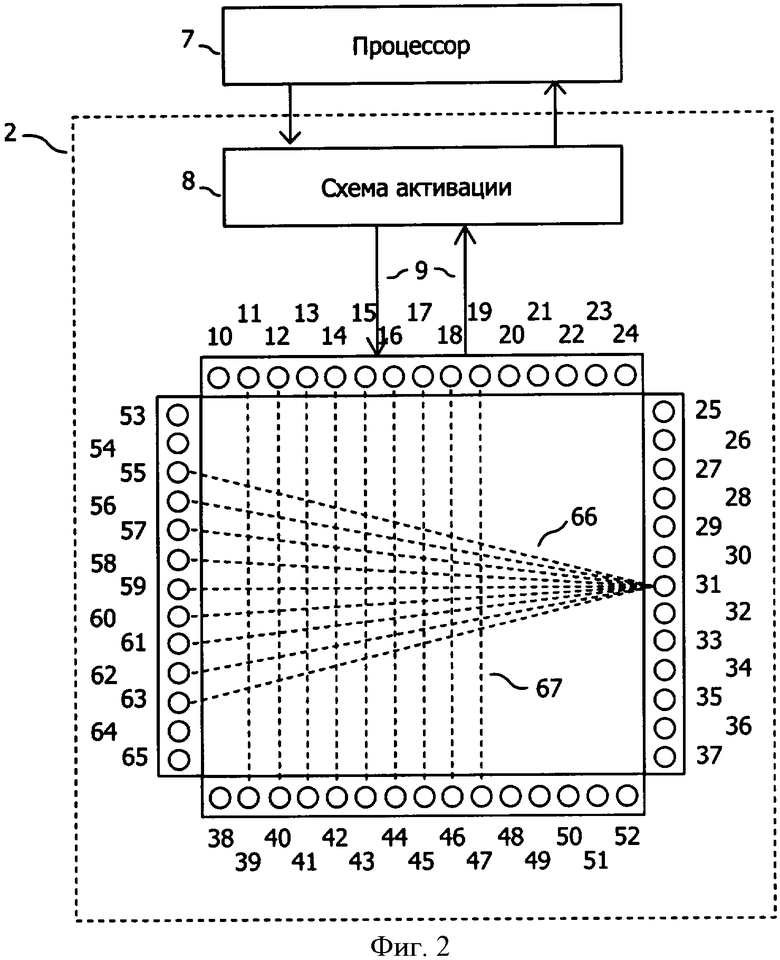
На фиг.2 представлена схемная реализация заявляемой оптоэлектронной сенсорной системы, включающей в себя сенсорную панель 1 и процессор 7. Сенсорная панель 1 включает схему активации 8, связанную посредством интерфейсной шины 9 с размещенным по ее краям множеством излучателей 10, 11, …, 24 и 25, 26 …, 37, в качестве которых могут быть использованы ИК светодиоды, и расположенных напротив них множеством приемников 38, 39, …, 52 и 53, 54, …, 65, в качестве которых могут быть использованы ИК-фототранзисторы. Посредством управляемой активации названного множества излучателей и управляемой активации названного множества приемников процессор 7 обеспечивает формирование наборов детекторных лучей, пространственно упорядоченных в соответствии с одним или более пространственными шаблонами.
Фиг.2 иллюстрирует также два отдельных набора детекторных лучей 66 и 67, каждый из которых формируют в соответствии со своим отдельным пространственным шаблоном. Так, набор детекторных лучей 66 основан на пространственном шаблоне, определяемом полярной системой координат, и может быть определен одним из следующих выражений, устанавливающих набор активируемых пар излучатель-приемник:

или

где:
PEi и PRi - позиции соответственно излучателя и приемника, активируемых при формировании i-го детекторного луча из набора детекторных лучей;
PBE и PBR - отсчетные позиции соответственно излучателя и приемника (для различных наборов детекторных лучей величины PBE и PBR могут различаться);
М - целое число, принимающее значения 1, 2, 3 и т.д.
Соответственно набор детекторных лучей 67 основан на пространственном шаблоне, определяемом декартовой системой координат, и может быть определен следующим выражением, устанавливающим набор активируемых пар излучатель-приемник:

или

Вариант реализации способа получения адаптивной оптоэлектронной сенсорной панели основан на оценивании местоположений N (N=1, 2, 3, …) касаний сенсорной панели. Данная реализация способа включает три шага. Ниже представлен вариант реализации рассматриваемого технического решения для случая смещения чувствительной области сенсорной панели.
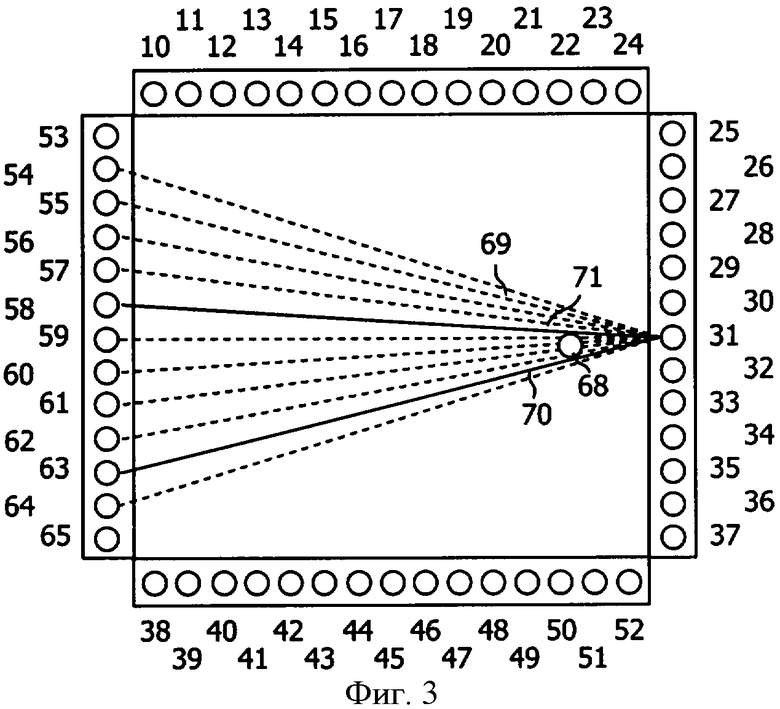
На первом шаге оценивают местоположение касания 68 сенсорной панели, выполняемое на предварительно определенной позиции экрана видеомонитора, на основе формирования первой сетки детекторных лучей 69, иллюстрируемой на фиг.3 и включающей один набор детекторных лучей, упорядоченных в соответствии с первым пространственным шаблоном. В данном наборе детекторные лучи 70 и 71 представляют собой первый и последний блокируемые в результате касания детекторные лучи. Ниже представлено выражение, определяющее активируемые пары излучатель-приемник для формирования названного набора детекторных лучей

где:
PYEi и PYRi - позиции соответственно излучателя и приемника, активируемых при формировании i-го детекторного луча по у-координатной оси;
PYB и PYB - отсчетные позиции соответственно излучателя и приемника по у-координатной оси;
Pmax - максимальная позиция излучателей и приемников по у-координатной оси.
В качестве позиции, на которой выполняют касание, определена позиция экрана видеомонитора, которая примыкает к его правой границе и находится на одинаковом удалении от его верхней и нижней границ, то есть имеет дисплейные координаты Xmax и Ymax/2. В другом варианте реализации рассматриваемого технического решения может быть использована другая позиция. Для большей определенности в действиях оператора касание сенсорной панели может быть выполнено в ответ на приглашение (например, текстовое), отображаемое на экране видеомонитора.
Графическая схема оценивания местоположения названного касания 68 представлена на фиг.4 и заключается в оценивании величины его смещения 72 относительно позиции излучателя 31. Оценивание величины смещения 72 основано на идентификации первого и последнего прерванных касанием детекторных лучей 70 и 71 из набора детекторных лучей 69, вычисления средней величины позиций данных детекторных лучей, выраженных через позиции активируемых при их формировании приемников 58 и 63, и приведения ее к позиции касания, выполняемых в соответствии со следующим выражением:

где:
Yg - относительная координата 72 местоположения касания сенсорной панели по у-координатной оси относительно отсчетной позиции излучателя, активируемого при формировании сетки 69 детекторных лучей;
KY - коэффициент, отражающий соотношение длин двух отрезков прямых, заключенных между излучателем 31 и приемником 59 и между излучателем 31 и позицией касания;
PYm и PYn - позиции излучателей, активируемых при формировании соответственно первого и последнего прерванных детекторных лучей 70 и 71;
Р - шаг следования излучателей и приемников сенсорной панели.
На втором шаге устанавливают грубую чувствительную область сенсорной панели, для чего на основе выполненного на первом шаге оценивания местоположения касания сенсорной панели, конфигурируют вторую сетку детекторных лучей 73, иллюстрируемую на фиг.5 и включающую один набор детекторных лучей, формируемый в соответствии со вторым пространственным шаблоном, основанным на декартовой системе координат, который может быть определен следующим выражением для набора активируемых пар излучатель-приемник:

где:
]А[- функция, представляющая собой целую часть от А;
PmaxY - количество детекторных лучей в наборе детекторных лучей, образующих вторую сетку детекторных лучей.
Иллюстрируемая на фиг.5 конфигурированная сетка детекторных лучей представляет собой координатную сетку грубой чувствительной области. В соответствии с выражением (8), при у-координатном исходном наборе пар излучатель-приемник 25-53, 26-54, 27-55, …, 36-64, 37-65 и величине смещения ]Yg[=2, набор активируемых пар излучатель-приемник при формировании конфигурированной сетки детекторных лучей будет следующим 27-55, 28-56, 29-57, …, 36-64, 37-65.
На третьем шаге получают уточненную чувствительную область сенсорной панели, для чего связывают координаты конфигурированной сетки детекторных лучей с координатами чувствительной области сенсорной панели посредством вычисления коэффициентов матрицы преобразования координат сетки детекторных лучей в координаты чувствительной области сенсорной панели. Применительно к рассмотренной реализации технического решения выражение для преобразования координат имеет следующий вид:
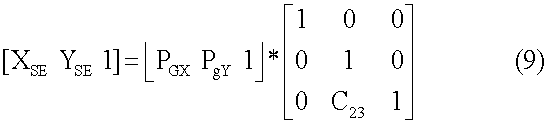
где:
PSE и PSE - координаты чувствительной области сенсорной панели;
PgY - координата касания сенсорной панели по у-координатной оси, получаемая на основе формирования второго набора детекторных лучей.
Единственный коэффициент С23 матрицы в выражении (9) может быть вычислен следующим образом:

На фиг.6 представлен пример координатной сетки 74 чувствительной области сенсорной панели, формируемой применительно к варианту, когда С23=0,25. Другими словами, когда координатная сетка чувствительной области сенсорной панели смещена относительно координатной сетки конфигурированной сетки детекторных лучей на величину 0,25.
Рассмотренная реализация технического решения позволяет получить чувствительную область сенсорной панели, характеризующуюся смещением по одной из координатных осей. Для рассмотренной реализации технического решения смещение имеет место по у-координатной оси. В другом варианте реализации способа смещение может иметь место по х-координатной оси. При этом набор детекторных лучей, формируемый сенсорной панелью по другой координатной оси, может оставаться неизменным.
Выбор позиции касания, примыкающей к правой границе экрана видеомонитора, представляется оправданным и наиболее предпочтительным вариантом с точки зрения выполнения оператором касания сенсорной панели правой рукой. Однако ситуация не изменится, если позиция касания будет выбрана примыкающей к левой границе экрана видеомонитора. В этом случае предпочтительным может рассматриваться касание на отображаемой позиции левой рукой.
Данный вариант реализации способа решает задачу линейного смещения чувствительной области относительно сенсорной панели. В соответствии с чем матрица преобразования координат включает единственный коэффициент С23, и соответственно процедура преобразования координат заключается в выполнении единственной вычислительной операции - сложения. Причем коэффициент С23 представляет собой величину, меньшую 1 и соответственно способную оказать влияние исключительно на младший разряд координаты чувствительной области сенсорной панели. Другими словами разрядность представления данного коэффициента может быть принята ограниченной.
Очевидно, что аналогичным образом может быть реализован способ, обеспечивающий получение смещения чувствительной области по обеим координатным осям. Отличие данного варианта реализации способа от рассмотренного выше заключается в том, что он предполагает выполнение оценивания местоположений двух касаний сенсорной панели соответственно на двух позициях экрана видеомонитора, например на позициях, находящихся у правой и нижней границ экрана видеомонитора, иллюстрируемых на фиг.1. В соответствии с чем должны быть вычислены два коэффициента С13 и С23 матрицы преобразования координат.
Наиболее общий случай реализации рассматриваемого технического решения учитывает как смещение чувствительной панели, так и ее поворот относительно сенсорной панели. Данный вариант способа может быть реализован путем выполнения, например, четырех касаний сенсорной панели соответственно на четырех позициях экрана видеомонитора, иллюстрируемых на фиг.1. В соответствии с чем конфигурирование сетки детекторных лучей выполняют на основе оценивания местоположения названных четырех касаний сенсорной панели. Соответственно связывание координат названной конфигурированной сетки детекторных лучей и координат чувствительной области выполняют путем вычисления четырех коэффициентов С12, С13, С21 и С23 матрицы преобразования координат, иллюстрируемой следующим выражением:

Данные коэффициенты могут быть вычислены в соответствии со следующими выражениями:




где:
PX max и PY max - максимальная позиция излучателя (приемника) соответственно по х- и у-координатным осям сенсорной панели.
На фиг.7 представлен пример координатной сетки 75 чувствительной области, характеризующейся поворотом относительно центра сенсорной панели.
Согласно выражению (11) процедура преобразования координат касания сенсорной панели, для рассматриваемого варианта реализации способа, требует выполнения всего двух операций умножения PgY*С12 и PgX*C21 и четырех операций сложения. Причем детальный анализ выражений (12) и (14) показывает, что представляется возможным существенно оптимизировать формат выполняемых при преобразовании координат вычислительных операций.
Коэффициенты С12 и С21 существенно меньше 1 и в состоянии оказывать влияние исключительно на младшие двоичные разряды координат XSE и YSE чувствительной области, они могут представляться с ограниченной точностью. По этой причине выполняемые в выражении (11) операции умножения с использованием коэффициентов С12 и С21 могут быть выполнены за меньшее время.
Например, для представления коэффициентов С12 и С21 достаточным может рассматриваться 2 двоичных разряда. В соответствии с чем исходя из того, что разрешающая способность сенсорной панели определяется, например, 10 двоичными разрядами, длительность выполнения вычисления выражений PgY*C12 и PgX*C21 может быть сокращена фактически в 5 раз. В соответствии с чем время выполнения преобразования координат, определяемых выражением (11), будет мало отличаться от времени преобразования координат, определяемым выражением (9).
Необходимо отметить, что необходимый уровень адаптивности чувствительной области сенсорной панели обеспечивают за счет оценивания местоположения получаемой чувствительной области сенсорной панели на основе формирования одной сетки детекторных лучей в соответствии с первым пространственным шаблоном, основанном на полярной системе координат и обеспечивающим повышенное разрешение сенсорной панели. Тогда, как при интерактивном взаимодействии с сенсорной системой, оценивание местоположения касания сенсорной панели обеспечивают путем формирования другой сетки детекторных лучей в соответствии со вторым пространственным шаблоном, основанном на декартовой системе координат и обеспечивающим наименьшее время отклика сенсорной системы.
Все рассмотренные выше варианты реализации рассматриваемого способа раскрывались применительно к оцениванию местоположения касания сенсорной панели на основе соотношения «одно касание сенсорной панели - один набор детекторных лучей». В других реализациях может быть использованы другие соотношения, например оценивание местоположения касания сенсорной панели на основе формирования двух наборов детекторных лучей 76 и 77, иллюстрируемых на фиг.8. Данное соотношение позволяет реализовать процедуру калибровки сенсорной панели для больших диапазонов смещения или поворота сенсорной панели относительно экрана видеомонитора, определяемых также на основании позиций распознанных первого и последнего прерванных детекторных лучей 78 и 79.
Другая реализация способа получения адаптивной оптоэлектронной сенсорной панели представлена ниже и основана на предварительном определении чувствительной области для одной сенсорной панели и использовании ее для двух или более сенсорных панелей. Данная реализация способа может иметь место, когда в условиях роботизированного производства, выполняющего монтирование сенсорных панелей на видеомониторы, параметры адаптации чувствительной области определяют для одной отдельной сенсорной панели и одного отдельного видеомонитора и используют для всей партии изготавливаемых видеомониторов с сенсорной панелью. Способ включает три шага.
На первом шаге первоначально распознают касание сенсорной панели, основанное на формировании первой сетки детекторных лучей, включающей, по крайней мере, один набор детекторных лучей, например, по х- или у-координатной оси.
На втором шаге устанавливают грубую чувствительную область сенсорной панели, для чего реконфигурируют названную сетку детекторных лучей относительно предварительно определенной чувствительной области сенсорной панели. Причем чувствительная область может быть определена на основе одной из вышерассмотренных схем.
На третьем шаге получают уточненную чувствительную область сенсорной панели, для чего связывают координаты реконфигурированной сетки детекторных лучей с координатами чувствительной области сенсорной панели путем установки коэффициентов матрицы преобразования координат реконфигурированной сетки детекторных лучей в координаты названной чувствительной области сенсорной панели.
Данная реализация способа позволяет предварительно определить параметры реконфигурирования сетки детекторных лучей и коэффициенты матрицы преобразования координат названной сетки детекторных лучей в координаты чувствительной области сенсорной панели и сохранить их в EEPROM или FLASH памяти процессора сенсорной системы. После чего данные параметры могут быть использованы для получения чувствительной области сенсорной панели в момент начала интерактивного взаимодействия оператора с сенсорной системой. Начало интерактивного взаимодействия определяют по моменту распознавания касания сенсорной панели. В связи с чем до начала интерактивного взаимодействия сенсорная панель может формировать сетку детекторных лучей, характеризующуюся, например, активацией пар излучатель-приемник, излучатели и приемники которых выровнены on-axis (по оптической оси) друг относительно друга. Соответственно во время интерактивного взаимодействия сенсорная панель может формировать реконфигурированную сетку детекторных лучей, формируемую посредством активации пар излучатель-приемник, излучатели и приемники которых выровнены off-axis (не по оптической оси) друг относительно друга, то есть теми парами излучатель-приемник, которые отражают взаимное пространственное положение сенсорной панели относительно экрана видеомонитора.
Еще одна реализация способа получения адаптивной оптоэлектронной сенсорной панели аналогична предыдущей реализации. Отличие заключается в том, что способ включает два шага. На первом шаге конфигурируют сетку детекторных лучей относительно предварительно определенной чувствительной области сенсорной панели. Соответственно на втором шаге связывают координаты конфигурированной сетки детекторных лучей с координатами чувствительной области сенсорной панели. Данная реализация способа представляется актуальной для случая, когда грубая установка чувствительной области и получение уточненной чувствительной области сенсорной панели выполняют, например, при инициализации сенсорной панели по включению питания.
Как следует из представленных выше реализации способа и устройства, рассматриваемые изобретения позволяют сократить время отклика сенсорной системы за счет реализации чувствительной области сенсорной системы адаптивной. Причем процедура адаптации реализована двухэтапной. Грубую адаптацию выполняют посредством конфигурирования сетки детекторных лучей сенсорной панели. Соответственно уточняющую адаптацию обеспечивают посредством связывания координат конфигурированной сетки детекторных лучей с координатами чувствительной области сенсорной панели.
Выполнение чувствительной области сенсорной панели адаптивной позволяет сократить число вычислительных операций, выполняемых при преобразовании координат касания сенсорной панели в координаты чувствительной области, а также сократить разрядность выполняемых вычислительных операций и соответственно время их выполнения. Тем самым сокращается время, затрачиваемое на выполнение процедуры преобразования координат касания сенсорной панели в координаты экрана видеомонитора и соответственно - время отклика сенсорной панели, а также снижаются требования к ее вычислительным ресурсам.
Список используемой литературы
1. Патент US 4710758, Способ для автоматизированной калибровки сенсорной панели, МПК4 G09G 3/00, опубликован 01.12.1987 г.
2. Патент US 5751276, Способ для калибровки дисплея с сенсорной панелью, МПК7 G09G 5/00, опубликован 23.05.1996 г.
3. Патент US 4689446, Устройство ввода с сенсорной панелью, МПК4 G08C 21/00, опубликован 25.08.1987 г.
4. Патент US 6429857, Система и способ для повышения разрешающей способности оптоэлектронных сенсорных систем, МПК7 G09G 5/00, опубликован 06.08.2002 г.
Способ получения адаптивной оптоэлектронной сенсорной панели (варианты) и система для его реализации относятся к информационным системам, использующим сенсорную технологию ввода информации в компьютер. Технический результат - снижение времени отклика оптоэлектронной сенсорной системы и требований к ее вычислительным ресурсам. Способ получения адаптивной сенсорной панели и система для его реализации обеспечивают получение адаптивной сенсорной панели на основе конфигурирования сетки детекторных лучей сенсорной панели относительно предварительно определяемой ее чувствительной области и связывания координат конфигурированной сетки детекторных лучей с координатами названной чувствительной области. 4 н. и 4 з.п. ф-лы, 8 ил.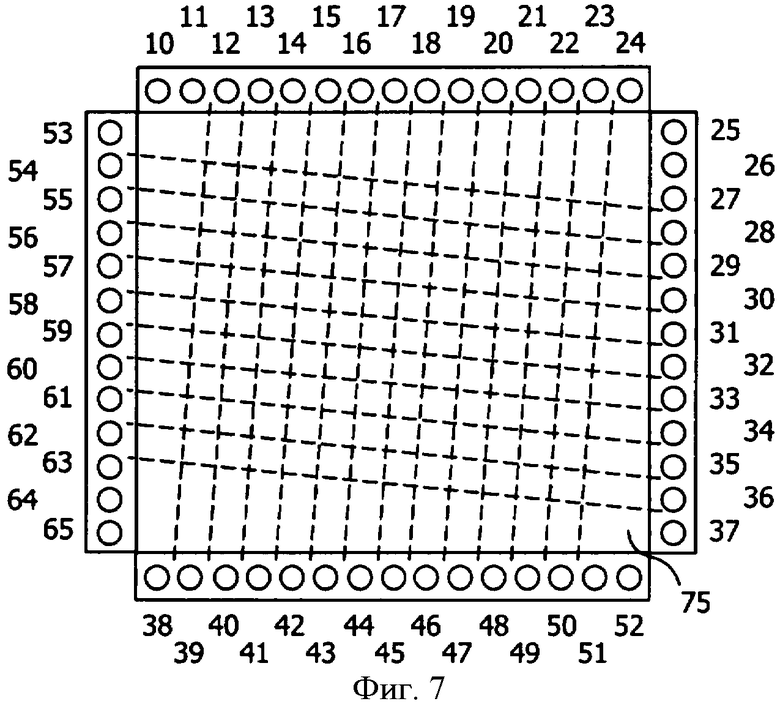
1. Способ получения адаптивной оптоэлектронной сенсорной панели, заключающийся в обеспечении требуемой адаптации координат сенсорной панели, отличающийся тем, что предварительно оценивают местоположения N (N=1, 2, …) касаний сенсорной панели соответственно на N (N=1, 2, …) предварительно определяемых позициях экрана видеомонитора на основе формирования первой сетки детекторных лучей, включающей М (М=1, 2, 3, …) наборов детекторных лучей, детекторные лучи каждого из которых упорядочены в соответствии с первым пространственным шаблоном, затем конфигурируют вторую сетку детекторных лучей, включающую, по крайней мере, один набор детекторных лучей, упорядоченных в соответствии со вторым пространственным шаблоном, на основе оценивания названных местоположений N (N=1, 2, …) касаний сенсорной панели и координаты второй сетки детекторных лучей связывают с координатами названной чувствительной области сенсорной панели.
2. Способ по п.1, отличающийся тем, что местоположения касаний сенсорной панели оценивают посредством получения относительных координат названных касаний.
3. Способ по п.1, отличающийся тем, что координаты второй сетки детекторных лучей связывают с координатами названной чувствительной области сенсорной панели посредством вычисления коэффициентов матрицы преобразования координат второй сетки детекторных лучей в координаты названной чувствительной области.
4. Способ получения адаптивной оптоэлектронной сенсорной панели, заключающийся в обеспечении требуемой адаптации координат сенсорной панели, отличающийся тем, что после распознавания касания сенсорной панели на основе формирования сетки детекторных лучей, названную сетку детекторных лучей реконфигурируют относительно предварительно определяемой чувствительной области сенсорной панели и координаты реконфигурированной сетки детекторных лучей связывают с координатами названной чувствительной области.
5. Способ по п.4, отличающийся тем, что координаты реконфигурированной сетки детекторных лучей связывают с координатами названной чувствительной области на основе предварительно определяемой матрицы преобразования координат.
6. Способ получения адаптивной оптоэлектронной сенсорной панели, заключающийся в обеспечении требуемой адаптации координат сенсорной панели, отличающийся тем, что первоначально сетку детекторных лучей сенсорной панели конфигурируют относительно предварительно определяемой чувствительной области сенсорной панели, после чего координаты конфигурированной сетки детекторных лучей связывают с координатами названной чувствительной области.
7. Способ по п.6, отличающийся тем, что координаты конфигурированной сетки детекторных лучей связывают с координатами названной чувствительной области на основе предварительно определяемой матрицы преобразования координат.
8. Оптоэлектронная сенсорная система, включающая оптоэлектронную сенсорную панель со множеством излучателей, размещенных по краям сенсорной панели, и множеством приемников, размещенных по краям сенсорной панели напротив названных излучателей, и процессор для управляемой активации названного множества излучателей и управляемой активации названного множества приемников для формирования сетки детекторных лучей, обеспечивающих получение чувствительной области сенсорной панели, отличающаяся тем, что процессор выполнен с возможностью конфигурирования сетки детекторных лучей относительно предварительно определяемой чувствительной области сенсорной панели и связывания координат названной сетки детекторных лучей с координатами названной чувствительной области.
| US 6707448 A, 16.04.2004 | |||
| Переносный кухонный очаг | 1918 |
|
SU2456A1 |
| US 6429857 B1, 06.08.2002 | |||
| Датчик для системы автоматического адресования груза по замкнутой трассе | 1972 |
|
SU601661A1 |

