Изобретение относится к области вычислительной техники и электроники, в частности к способам ввода информации в компьютеры, игровые приставки, POS терминалы, информационные табло и т.п. и может быть использовано в приборостроении.
В настоящее время существует восемь основных способов определения координат на сенсорных панелях, отличающихся по принципу действия. Это:
- Резистивный;
- Емкостной;
- Проекционно-емкостной;
- Поверхностных акустических волн (ПАВ);
- Распознавания акустических импульсов (APR);
- Электромагнитный (индукционный);
- Сканирование инфракрасными лазерными лучами;
- Создание решетки инфракрасных лазерных лучей.
Резистивный способ заключается в создании двух тонких, оптически прозрачных (светопропускание до 75%) электропроводящих слоев (например, на основе окиси индия - In2O3), разделенных тонким воздушным зазором шириной 25-90 мкм. Зазор задается сеткой точечных полимерных изоляторов, наносимых на одну из поверхностей. Вдоль краев панели наносятся электрические дорожки с низким электрическим сопротивлением. При приложении к панели определенного усилия нажатия происходит замыкание слоев. Соответственно образуется резистивный четырехполюсник и по соотношению сопротивлений можно вычислить координату точки замыкания (http://www.touchgames.ru/rus/products/sensor_panels/resistive touch/Resistive touch - резитивные сенсорные панели).
Недостатком вышеуказанного способа является влияние старения резистивного слоя на точность определения координаты касания.
Емкостной способ заключается в создании электропроводящего слоя на стеклянной панели. Электроды, расположенные по углам экрана, подают на проводящий слой переменное напряжение. При касании экрана пальцем или другим проводящим предметом появляется утечка тока. Ток во всех четырех углах регистрируется датчиками и передается в контроллер, вычисляющий координаты точки касания (http://ru.wikipedia.org/wiki Сенсорные экраны. Емкостные сенсорные экраны).
Недостатком вышеуказанного способа является снижение работоспособности при использовании стилуса или перчаток.
Проекционно-емкостной способ заключается в создании системы электродов - электропроводящих микрополосок на изоляторе. Обычно они выполняются в виде двух взаимно перпендикулярных гребенок. Осуществляется контроль емкости электродов. При приближении пальца к поверхности панели изменяется емкость электродов, что регистрируется, и вычисляется точка прикосновения (http://ru.wikipedia.org/wiki Сенсорные экраны. Проекционно-емкостные сенсорные экраны).
Недостатком вышеуказанного способа является снижение работоспособности при использовании стилуса или перчаток.
Способ на основе ПАВ заключается в создании пьезоэлектрическим излучателем акустического импульса вдоль кромки стеклянного экрана, где создается система отражателей в виде насечек на стекле, расположенных под углом 45°. При этом исходный импульс поверхностной акустической волны распадается на ряд импульсов, последовательно пересекающих поверхность экрана. На противоположной стороне стеклянного экрана также имеются отражатели в виде насечек, отражающих акустические импульсы в приемник ультразвука. Прикосновение к поверхности экрана пальца гасит амплитуду импульса, что позволяет определить, по времени прихода импульсов с пониженной амплитудой, координату прикосновения. Вторая координата точки контакта определяется аналогично (http://www.touchgames.ru/rus/products/sensor_panels/saw touch SAW touch - сенсорные ПАВ-панели).
Недостатком вышеуказанного способа является необходимость использования стекол достаточно большой толщины для предотвращения затухания ультразвука.
Способ распознавания акустических импульсов заключается в регистрации звука, генерируемого в точке касания стеклянной панели несколькими приемниками, и вычислении, по времени прихода импульсов, координат источника звука (http://blogwar.ru/article Сенсорный экран. Сенсорные экраны APR (распознавание акустического импульса).
Недостатком вышеуказанного способа является необходимость обеспечения высокой помехозащищенности системы регистрации акустических импульсов.
В электромагнитном или индукционном способе используется стилус, содержащий антенну и резонансный контур. Под сенсорной панелью располагают приемопередающие катушки индуктивности. Они создают электромагнитное поле на резонансной частоте контура стилуса, в цепи стилуса генерируется переменный электрический ток, приводящий к излучению антенной стилуса соответствующего электромагнитного поля, которое улавливается катушками сенсорной панели. По амплитуде сигналов на катушках восстанавливаются координаты стилуса (http://ru.wikipedia.org/wiki Сенсорные экраны. Индукционные сенсорные экраны).
Недостатком вышеуказанного способа является обязательное использование специального стилуса, содержащего резонансный контур.
Известен способ сканирования поверхности лазерными лучами ИК-диапазона, предложенный компанией Microsoft (TOUCHWALL: МУЛЬТИСЕНСОРНАЯ СТЕНА ОТ MICROSOFT. Деловая пресса. Электронное издание, №58 (431) - 59 (431) от 23.05.08).
Способ заключается в сканировании поверхности панели тремя лазерными лучами и в фиксировании фотоприемником отражения этих лучей от манипулятора. Зная закон изменения во времени углов наклона сканирующих лучей и фиксируя по сигналу фотоприемника моменты пересечения лучей с манипулятором, можно вычислить координату манипулятора.
Недостатком вышеуказанного способа является необходимость использования подвижных элементов конструкции для обеспечения сканирования лучей. Использование подвижных элементов приводит, как правило, к увеличению стоимости устройств и снижению их надежности.
По технической сущности наиболее близким к предлагаемому способу является способ указания координат сенсорной панели, основанный на создании решетки инфракрасных лазерных лучей (Patent №CN20071073148 20070130, Inventors:YALIN GUO [CN]; JIAN MA [CN]; XIAODONG XIE [CN]; CHUNSHENG ZUO [CN], Applicant: BEIJING HITEVISION DIGITAL MED [CN] Infrared touch screen based input method and system. Publication date: 2008-08-06).
Способ заключается в том, что используются две пары линеек излучателей и приемников ИК-диапазона, расположенные взаимно-перпендикулярно и образующие решетку лучей над панелью. Приближение к поверхности панели пальца или стилуса приводит к оптическому перекрытию ряда вертикальных и горизонтальных лучей, что позволяет судить о точке контакта.
Недостатками прототипа являются:
- Необходимость использования линеек с большим количеством излучателей и приемников, что ведет к высокой стоимости изделия и снижает его надежность;
- Относительно высокая погрешность определения координаты контакта, соответствующая шагу расположения излучателей и приемников на линейках.
Техническим результатом заявляемого способа является расширение функциональных возможностей и области применения сенсорной панели путем создания способа определения координат сенсорной панели для введения данных в компьютеры, игровые приставки, POS терминалы, информационные табло и т.п. с небольшим количеством излучателей и приемников ИК-диапазона, обладающего высокой точностью определения координат точки контакта.
Для достижения технического результата в способе определения координат манипулятора на сенсорной панели для введения данных, согласно изобретению, над поверхностью сенсорной панели с помощью, по крайней мере, одного излучателя создают поток модулированного излучения электромагнитных волн ИК-диапазона, покрывающий поверхность сенсорной панели, осуществляют прием отраженных от манипулятора, находящегося в потоке модулированного излучения, электромагнитных волн с помощью, по меньшей мере, двух пространственно разнесенных приемников, измеряют разности фаз модулированных сигналов на излучателе (излучателях) и приемниках, после чего по соотношениям разностей фаз вычисляют координаты манипулятора на сенсорной панели. Кроме того, прием отраженных от манипулятора, находящегося в потоке модулированного излучения, электромагнитных волн осуществляют с помощью, по меньшей мере, трех пространственно разнесенных приемников, после чего дополнительно вычисляют радиус манипулятора, а также поток модулированного излучения электромагнитных волн ИК-диапазона создают с помощью, по меньшей мере, двух излучателей, включаемых поочередно, а координаты манипулятора на сенсорной панели получают путем усреднения координат, вычисляемых по результатам измерений разностей фаз модулированных сигналов при работе каждого излучателя.
Сравнение предлагаемого способа с ближайшим аналогом позволяет утверждать о соответствии критерию «новизна», а отсутствие в аналогах отличительных признаков позволяет судить о соответствии критерию «изобретательский уровень».
Предварительные испытания подтверждают возможность широкого промышленного использования.
На Фиг.1 представлена схема устройства реализации заявляемого способа, на Фиг.2 представлена схема для расчета координаты, на Фиг.3 представлены графики зависимости фазы от смещения точки контакта для кратных частот модуляции. На Фиг.4 представлен пример функциональной блок-схемы устройства, реализующего заявляемый способ.
На Фиг.1 - вариант схемы устройства по заявляемому способу, содержащего четыре излучателя и четыре приемника: первый излучатель - 1; первый приемник - 2; второй приемник - 3; второй излучатель - 4; третий излучатель - 5; третий приемник - 6; четвертый излучатель - 7; четвертый приемник - 8; отпечаток манипулятора (пальца) - 9.
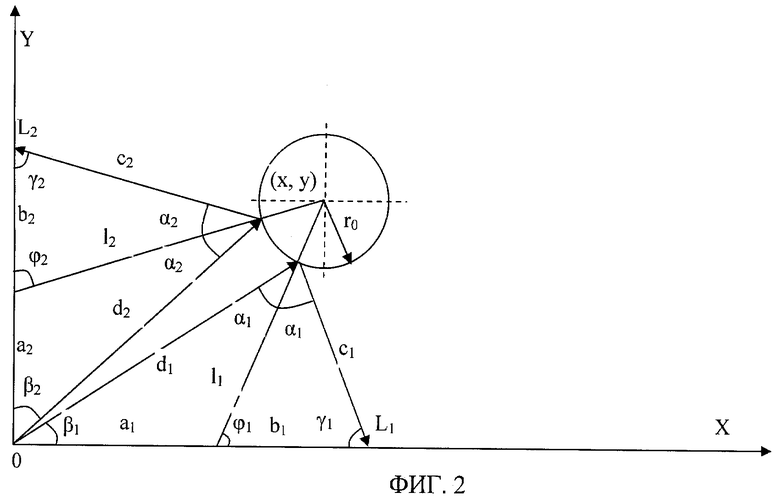
На Фиг.2 - схема для расчета координаты. Первый излучатель находится в точке 0 (одном из углов прямоугольного экрана). Первый приемник находится в точке L1, второй приемник находится в точке L2. Отпечаток манипулятора (пальца) находится в точке с координатами (х, у) и имеет радиус r0.
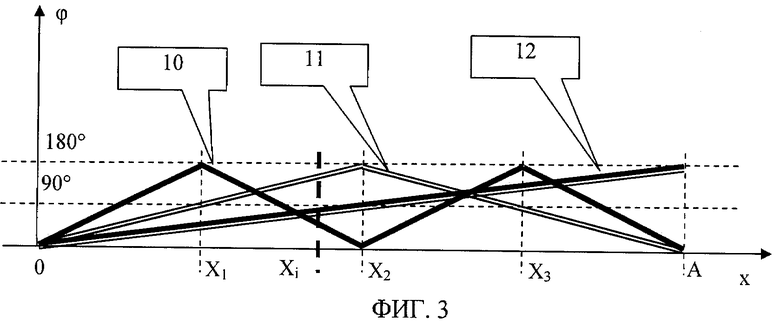
На Фиг.3 - графики зависимости фазы от смещения точки контакта для кратных частот модуляции. Кривая 10 - зависимость фазы от смещения для частоты v. Кривая 11 - зависимость фазы от смещения для частоты ν1=1/2ν. Кривая 12 - зависимость фазы от смещения для частоты ν2=1/2ν1.
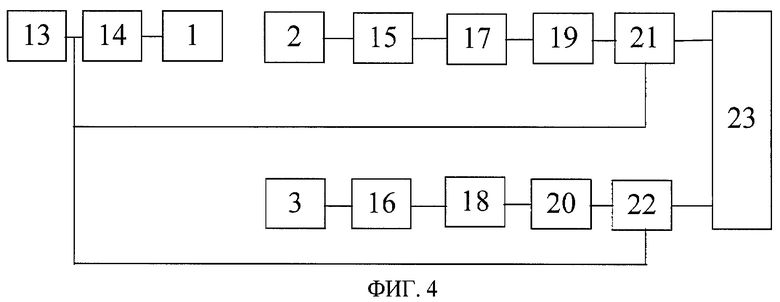
На Фиг.4 - пример функциональной блок-схемы устройства по заявляемому способу содержит один излучатель и два приемника: генератор - 13; модулятор - 14; первый излучатель (лазерный светодиод) - 1; первый приемник (фотодиод) - 2, второй приемник (фотодиод) - 3; предварительные усилители - 15, 16; полосовые фильтры - 17, 18; усилители с автоматической регулировкой усиления - 19, 20; фазовые детекторы - 21, 22; микропроцессорное устройство - 23.
Способ реализуется следующим образом.
Излучатели создают поток модулированного инфракрасного излучения в широком угле по горизонтали и в узком - по вертикали (см. Фиг.1). Существующие маломощные полупроводниковые лазеры это позволяют. Частота модуляции ν выбирается исходя из размеров панели. Предпочтительно, чтобы максимальный размер панели не превышал 1/4, от длины волны модуляции λ=c/ν, где с - скорость света. Это необходимо для однозначного определения разности фаз и, следовательно, для расчета координат манипулятора (стилуса, пальца и т.д.) на всей поверхности панели. Излучение отражается от поверхности манипулятора и попадает в приемники. Т.к. излучение промодулировано, то по разностям фаз можно определить точки отражения и по ним, например, вычислить «центр тяжести». Если контур точек отражения расширяется, то это можно интерпретировать как нажатие. Сенсорная панель может представлять собой прозрачную поверхность, за которой располагается, например, жидкокристаллический экран, или непрозрачную поверхность, на которую проецируется изображение.
Рассмотрим геометрию отражения от цилиндрического объекта (манипулятора, см. Фиг.2). Первый излучатель находится в начале координат - точке 0 (одном из углов прямоугольного экрана). Первый приемник находится в точке L1, второй приемник находится в точке L2. Отпечаток манипулятора (пальца) находится в точке с координатами (x, y) и имеет радиус r0.
Из равенства углов падения и отражения:




Из теоремы о сумме внутренних углов треугольника:


Из теоремы синусов:
Геометрия расположения излучателя и приемников известна, т.к. конструкция устройства должна быть определена:

Из фазовых измерений пути от излучателя до отражающего объекта и далее до приемников имеем:

Подставляя (5, 6, 11, 12) в (7-10), получаем совместно с (1-4) систему с меньшим числом неизвестных и уравнений.




Подставляя (16) в (14), получаем:

Если r0 - известен, то для определения x и y достаточно двух измерений. При этом выражения (1-4; 13, 15, 17, для i=1, 2), образуют систему из 10 уравнений для 10 неизвестных: x, y, a1, a2, l1, l2, φ1, φ2, γ1, γ2. Вполне возможно аналитическими методами еще несколько упростить данную систему, но, тем не менее, оказывается необходимым численное решение системы трансцендентных нелинейных уравнений. К настоящему времени хорошо разработаны различные итерационные методы решения таких систем, позволяющие получить решение с заданной точностью. Это, например, градиентные методы (метод наискорейшего спуска и метод спуска с вычислением координат градиента); метод Ньютона и т.д. /Г.Корн, Т.Корн. Справочник по математике. СПб, «Лань», 2003/. Современные микропроцессоры (например, типа PIC18F4550) позволяют реализовать решение подобных систем уравнений в реальном режиме времени.
Если r0 заранее не известен, то необходимо, по крайней мере, еще одно измерение. При этом система уравнений соответствующим образом увеличивается. Для повышения точности определения центра тяжести объекта касания может быть выбрана аппроксимирующая форма в виде эллипса. В этом случае система уравнений и, соответственно, число необходимых измерений далее пропорционально возрастут.
Т.е., иными словами, путем фазовых измерений определяются три точки отражения, через них проводится окружность и определяется ее центр. Возможно определить 4 точки отражения, провести через них эллипс и определить его центр тяжести. И так далее. С другой стороны возможно разбить измерения на несколько групп, вычислить по ним ряд центров тяжести полученных фигур и результаты усреднить. Следует отметить, что одно измерение может занимать время порядка единиц или долей микросекунд. Манипулятор в этом временном масштабе можно считать неподвижным.
Повышение точности определения координат и повышение надежности работы устройства, реализующего заявляемый способ, возможно путем увеличения числа излучателей и приемников. Для ряда приложений оптимальными могут быть устройства по заявляемому способу, содержащие, по меньшей мере, два излучателя и три приемника. В данном случае за счет минимального технического усложнения устройства достигается существенное расширение его функциональных возможностей.
Пусть имеется четыре излучателя и четыре приемника (см. Фиг.1). Излучатели могут работать последовательно, в узком спектральном диапазоне, чтобы уменьшить влияние внешних помех. Т.е. сначала включается первый излучатель. При этом первый и второй приемники регистрируют отраженное (непрямое) излучение. Сигналы с приемников и сигнал с излучателя через отрезок кабеля заданной длины поступают на входы фазовых детекторов, на которых определяются величины пути излучения через отражающий объект к приемнику. Затем (через время порядка микросекунды) включается второй излучатель и процесс измерения повторяется. И так далее циклическим образом.
Как видно из Фиг.1, в среднем можно получить N=8 измерений пути Si от излучателя к приемнику через отражающий объект (палец). Для определения 3 неизвестных (x, y, r0) требуется 3 измерения. Число комбинаций систем уравнений определяется выражением:
Легко видеть, что число комбинаций систем уравнений при N=8 составляет 56. Решая системы уравнений и усредняя полученные результаты, можно повысить точность определения точки касания.
ИК-излучение может быть промодулировано кратными частотами. Хорошо освоенная промышленностью кремниевая технология хорошо работает до частот ν~3 ГГц. Это длина волны λ=10 см. Соответственно размер рабочей площади составляет 1/4 от λ, т.е. 2.5 см. Достаточно просто определить фазу с точностью до 1 градуса. Таким образом, возможно с использованием достаточно простой техники определять на размерах порядка единиц сантиметров координату с погрешностью в пределах 100 мкм. Если размер рабочей площади превышает единицы сантиметров, а требование субмиллиметрового разрешения сохраняется, то возможно несущее ИК-излучение промодулировать кратными частотами, например ν1=1.5 ГГц, ν2=750 МГц и т.д. Тогда фазовый анализ на нижних частотах укажет часть области, где находится источник, а измерение на самой верхней частоте даст точную координату. На Фиг.3 представлена характерная (периодическая) зависимость сдвига фазы φ от координаты на кратных частотах.
Пусть манипулятор находится в точке Xi. Тогда по сдвигу фаз на частоте ν2 (меньше 90°) определяем, что стилус находится на интервале (0-Х2). По сдвигу фаз на частоте ν1 (больше 90°) определяем, что стилус находится на интервале (X1-Х2). И, наконец, по сдвигу фаз на частоте ν определяем точную координату Xi. Высокая точность обычно требуется для профессиональных конструкторских приложений.
Ввиду того, что способы указания (определения) координат на сенсорной панели, в которых достаточно одного-двух неподвижных излучателей и приемников ИК-излучения, до заявляемого изобретения отсутствуют, оно соответствует критерию "новизна".
Ввиду того, что использование фазочувствительной электроники неочевидно для построения инфракрасных сенсорных панелей, заявляемое изобретение соответствует критерию "изобретательский уровень".
Областью применения устройств на основе заявляемого способа может быть промышленность (CAD - проектирование, 2D - моделирование), индустрия развлечений (компьютерные игры, игровые консоли, игровые автоматы) и т.д. Заявляемое изобретение относительно несложно в реализации. Стоимость электронных компонентов для реализации данного устройства относительно невелика и может быть еще более снижена при выпуске специализированных микросхем в серийном производстве, что обеспечит конкурентоспособность с имеющимися аналогами. Соответственно заявляемое изобретение соответствует критерию "промышленная применимость".
Сведения, подтверждающие возможность осуществления изобретения.
Функциональная схема устройства, реализующего данный способ, представлена на Фиг.4.
Генератор 13 создает периодический сигнал, который подается на модулятор 14. Модулятор изменяет ток через первый излучатель 1 (лазерный светодиод) по закону модулирующего сигнала.
Таким образом, инфракрасное излучение лазерного диода оказывается модулировано по амплитуде. Инфракрасное излучение, отраженное от манипулятора поступает на первый приемник 2 и второй приемник 3 (фотодиоды), нагрузкой которых являются предварительные усилители 15, 16.
Так как излучение лазерного светодиода модулировано, то на нагрузках фотодиодов выделяется исходный модулирующий сигнал, который усиливается предварительными усилителями 15, 16 приемных устройств и поступает на полосовые фильтры 17, 18. Полосовые фильтры выделяют полосу частот 20 кГц÷1 МГц с центральной частотой, равной частоте модулирующего сигнала. Это позволяет избавиться от помех, вызванных другими источниками инфракрасного излучения. После фильтрации сигналы усиливаются усилителями с автоматической регулировкой усиления 19, 20 и поступают на сигнальные входы фазовых детекторов 21, 22. На опорные входы фазовых детекторов подается сигнал с генератора 13, при этом на выходах фазовых детекторов 21, 22 выделяется сигнал, пропорциональный разности фаз излучаемого и принимаемого сигналов. Эти сигналы позволяют определить параметры S1 и S2 (см. выражение (12)). С выходов фазовых детекторов сигналы поступают на микропроцессорное устройство 23 для последующей обработки - решения указанной выше системы уравнений и определения координат манипулятора на панели.
В схеме устройства могут быть использованы следующие радиоэлементы (микросхемы):
Генератор 74АС00; модулятор AD831; предварительные усилители AD8099; усилители с АРУ AD8367; фазовые детекторы AD8302; микропроцессорное устройство PIC18F4550; лазерный диод HFE 4084-322; фотодиоды BPW 24R.
Все элементы, необходимые для реализации заявляемого способа, - ИК-излучатели, ИК-приемники, фазовые детекторы, усилители, процессоры и т.д., существуют и выпускаются серийно. Нет принципиальных затруднений для разработки и выпуска специализированных микросхем.
Таким образом, данное изобретение может быть осуществлено.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МАНИПУЛЯТОРА ТИПА "МЫШЬ" ИЛИ "ЭЛЕКТРОННОЕ ПЕРО" И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2368941C1 |
| ОПТИЧЕСКОЕ СЕНСОРНОЕ УСТРОЙСТВО | 2013 |
|
RU2542947C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ | 2013 |
|
RU2548923C2 |
| Интерферометр для определения показателя преломления инфракрасной поверхностной электромагнитной волны | 2017 |
|
RU2653590C1 |
| Способ измерения коэффициента температуропроводности твердых тел | 1990 |
|
SU1786411A1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ КОМПЬЮТЕРОМ ДЛЯ ПРЕЗЕНТАЦИЙ, КОМПЬЮТЕРНЫХ ИГР И ТРЕНАЖЕРОВ | 2006 |
|
RU2322686C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ОБЪЕКТА | 2016 |
|
RU2629651C1 |
| ОПТИЧЕСКОЕ СЕНСОРНОЕ УСТРОЙСТВО С ИЗМЕРЕНИЕМ СКОРОСТИ | 2014 |
|
RU2575388C1 |
| СЕНСОРНАЯ ПАНЕЛЬ НА ОСНОВЕ СВЕТОВОДОВ | 2013 |
|
RU2541849C2 |
| БЕСКОНТАКТНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЙ ДО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2267743C1 |
Изобретение относится к способам ввода информации в компьютеры, игровые приставки, POS терминалы, информационные табло и т.п. и может быть использовано в вычислительной технике и электронике. Техническим результатом является расширение функциональных возможностей и области применения сенсорной панели, обеспечение высокой точности определения координат точки контакта с помощью небольшого количества излучателей и приемников ИК-диапазона. Способ определения координат на сенсорной панели для введения данных в компьютеры, игровые приставки, POS терминалы, информационные характеризуется тем, что над поверхностью сенсорной панели с помощью, по крайней мере, одного излучателя создают поток модулированного излучения электромагнитных волн ИК-диапазона, покрывающий поверхность сенсорной панели, осуществляют прием отраженных от манипулятора, находящегося вблизи поверхности сенсорной панели, электромагнитных волн с помощью, по меньшей мере, двух пространственно разнесенных приемников, измеряют разности фаз модулированных сигналов на излучателях (излучателе) и приемниках, по соотношениям разностей фаз вычисляют координаты манипулятора на сенсорной панели. 2 з.п. ф-лы, 4 ил.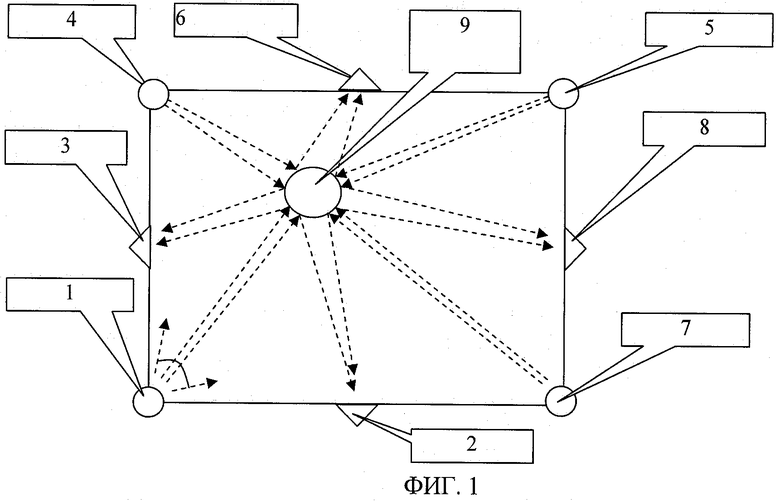
1. Способ определения координат манипулятора на сенсорной панели для введения данных в компьютеры, игровые приставки, POS-терминалы, информационные табло, характеризующийся тем, что над поверхностью сенсорной панели с помощью, по меньшей мере, одного излучателя создают поток модулированного излучения электромагнитных волн ИК-диапазона, покрывающий поверхность сенсорной панели, осуществляют прием отраженных от манипулятора, находящегося в потоке модулированного излучения, электромагнитных волн с помощью, по меньшей мере, двух пространственно разнесенных приемников, измеряют разности фаз модулированных сигналов на излучателе (излучателях) и приемниках, после чего по соотношениям разностей фаз вычисляют координаты манипулятора на сенсорной панели.
2. Способ по п.1, отличающийся тем, что прием отраженных от манипулятора, находящегося в потоке модулированного излучения, электромагнитных волн осуществляют с помощью, по меньшей мере, трех пространственно разнесенных приемников, после чего дополнительно вычисляют радиус манипулятора.
3. Способ по п.1, отличающийся тем, что поток модулированного излучения электромагнитных волн ИК-диапазона создают с помощью, по меньшей мере, двух излучателей, включаемых поочередно, а координаты манипулятора на сенсорной панели получают путем усреднения координат, вычисляемых по результатам измерений разностей фаз модулированных сигналов при работе каждого излучателя.
| RU 2007112048 А, 10.10.2008 | |||
| ПРЕОБРАЗОВАТЕЛЬ ГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 1999 |
|
RU2165102C1 |
| US 5179369 A, 12.01.1993 | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |

