небольшой мошностиХ; мв фиг. 4 - график аввисимости тока дебаланса моста от рас cTOHHitfl достаакн и эквивалентная схема датчика (при использовании привода большов мощности). Датчик содержит кольцевой реохорд, состоящий из сопротивлений 1.1-1.15, образующих два плеча моега, задакяцего перереключателя, имеющего неподвижные контакты 2-16, подключенные к клеммам сое динения резисторов реохорда, роторы 17 и 18, подключенные к источнику питания, и ротор 19, включенный в диагональ моста, два других плеча ;моста образованы сопро тивлениями 20, 21, сопротивление 22 вкл чено в измерительную диагональ моста. о . -в
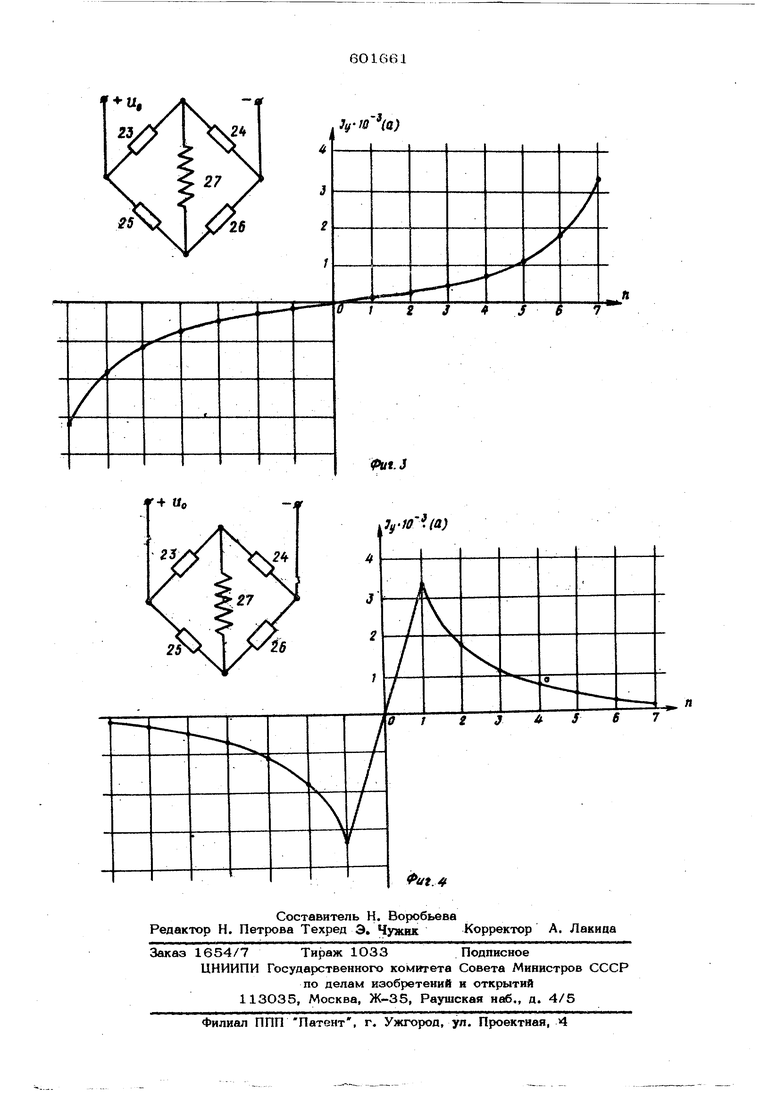
,24 2б г5 23-Т 24 2б « 1 2бЬ5 г -ТОК в измерительной диаго- 20 нали {а); -величина сопротивления измерительной диагонали (ом -напряжение питания моста ( b ) гб величины сопротивления ре зисторов 23-26. Зависимость справедлива для близких к нулю1 значений сопротивления диагонали питания моста, что имеет место. Учитывая, 4TQ все резисторы кольца равны между собой, также положив Т (для уп рощения выкладок), где го 2-« 22 величины сопротивления резисторов 2О, 2 22, и принимая UQ 1 b , получим: .,,Эквивалентная схема датчика, и вычисленные значения приведены в таблице на фиг. 3 и по ним построен график Зо- f где Y - расстояние доставки. Ток дебаланса монотонно возрастает в зависимости от увеличения расстояния до выбранной позиции труза. Если в измерительную диагональ моста включить, например, обмотку управления магнитного усилителя, «Нагрузкой которого является якорь электродвигателя постоянного тока, то окажется возможным осуществлять доставку груза до выбранной п зиции со скоростью, тем большей, чем дальше путь доставки. Необходимая коррекция (приведение за висимости к наиболее целесообразному дп каждого конкретного устрой твй виду, не
.4 Датчик работает с 1едусмиим обиалом. При перемещении ючюров 17 и 18 задаяцего переключателя по неподвижным конактам 2-16 ток дебаланса изменяется в ависимости от увеличения расстояния до выбранной позиции груза. При этом при управлении приводами небольшой мощности ток дебаланса монотонно возрасте (см. график фиг. 3), а при управлении приводами большой мощности тонoтoннo убывает (см. график фиг. 4). Для расчета тока в из мерительной, диагонали моста при различном взаимном положении роторов использована зависимость: 24 нарушая, разумеется, общего характера кривой) может осуществляться диодным функциональным преобразователем, выход которого соединен с дополнительной обмоткой управления магнитного усилителя. К)бласть применения такого рюда устройства ограничивается приводами небольшой мощности. Для управления приводами большей мощности целесообразно регулирование скорости двигателя производить по обмотке возбуждения. При этом необходимо иметь обратную зависимость тока дебаланса моста от расстояния доставки. Такая зависимость может быть получена с помощью схемы, приведенной на фиг. 2. Ток дебаланса здесь монотонно убывает в зависимости от увеутичения расстояния до выбранной позиции груза. Скорость двигателя постоянного тока тем больше, чем меньше ток возбуждения, т.е. достигается прежний эффект при управлении большими мощностями. Задача программирования цикла работы .приводного двигателя состоит из этапов разго га, движения с заданной скоростью и торможения с целью достижения безопасной для передачи груза скорости или точной остановки. Предлагаемый датчик обеспечивает определение оптимальной скорости движения рабочего органа подъемно-транспортного устройства в зависимости от расстояния доставки груза. Разгон двигателя может быть осуществлен любым известным способом (например, в функции тока). Точно так же решается вопрос торможения (например в функции пути - начиная с позиции, предшествующей разгрузочной). Формула изобретения Датчик для системы автоматического адресования груза по замкнутой трассе, содержащий электрический мост, состоящий иэ постояниой ветви, образованной двумя равными по сопротивлению плечами, и ветви, два плеча которой образованы кольцевым реохордом на резисторах, задающего переключателя, содержащего неподвижные контакты, подключенные к клеммам сое динения резисторов реохорда, роторы, два иэ которых подключены к источнику питания, а третий - включен в диагональ моста, содержашую измерительный резистор, о т л и чаюшийсю тем, что, с целью обеспечения выбора оптимальной скорости доставки груза в зависимости от дельности расстояния доставки, роторы задающего переключателя, подключенные к источнику питания, жестко соединены между соб.й под острым углом, длина дуги которого расстоянию между смежными клеммами по меньшей мере одного резистора кольцевого реохорда. Источники информации, принятые во внимание при Экспертизе: 1.Авторское свидетельство СССР ЗО4207, кл, В 65 G 63/ОО, О9.01.7О, 2.Авторское свидетельство СССР N 264504, кл. В 65 U6O/OO, 19G7.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления механизированным стеллажом | 1987 |
|
SU1452774A1 |
| КОНВЕЙЕРНЫЙ СТЕЛЛАЖ (СКЛАД) С АВТОМАТИЧЕСКИМ АДРЕСОВАНИЕМ ПОДВЕСОК | 1970 |
|
SU264506A1 |
| МНОГОТОЧЕЧНОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ ВРАЩАЮЩИХСЯ ОБЪЕКТОВ | 1970 |
|
SU265494A1 |
| Цифровой измеритель температуры | 1982 |
|
SU1070433A1 |
| Цифровой измеритель температуры | 1980 |
|
SU987415A1 |
| Устройство для измерения температуры | 1979 |
|
SU857740A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МОЩНОСТИ ТЕПЛОВЫХ ПОТЕРЬ С ОТХОДЯЩИМИ ГАЗАМИ | 1972 |
|
SU430291A1 |
| Дистационный влагомер | 1976 |
|
SU721727A1 |
| Автоматический компенсатор | 1980 |
|
SU949511A1 |
| СПОСОБ ИЗМЕРЕНИЯ ОБЪЕМНОЙ ПЛОТНОСТИ ГОРНОЙ ПОРОДЫ В СОСТАВЕ ГОРНОЙ МАССЫ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2492454C1 |
А/г. г
