Область техники, к которой относится изобретение
Настоящее изобретение относится к управляющему устройству, обладающему по меньшей мере четырьмя степенями свободы и, в частности, к управляющему устройству, отслеживающему два отклонения угла наклона по осям х и y, один угол поворота вокруг оси z и линейное отклонение по оси z.
Уровень техники
Для разных целей было создано много разных типов управляющих устройств. Наиболее распространенным управляющим устройством является так называемая "мышь", выдающая переменные позиционирования в двух измерениях для использования в операциях управления прикладными программами в компьютере. Другие управляющие устройства интерфейса включают в себя так называемый джойстик, который выдает переменные позиционирования рукоятки также в двух измерениях; однако, используя в сочетании с рукояткой дополнительные кнопки, можно увеличить количество "переменных позиционирования". Однако следует понимать, что такое устройство физически измеряет переменные позиционирования только в двух измерениях. Шаровой манипулятор "трекбол" также выдает данные для двух измерений; в игровом планшете "геймпад" часто используют небольшую, напоминающую джойстик рукоятку для измерения переменных позиционирования, и может расширить диапазон функциональности контроллера для управления большим количеством данных, используя дополнительные кнопки. Руль (для компьютерных игр) выдает данные по одному измерению.
Во многих разработанных решениях управляющее устройство выдает только исходные измерения, а не абсолютные измерения, а это значит, что для того, чтобы прикладная программа, основанная на абсолютных координатах управляющего устройства, работала правильно, необходимо проводить сложные вычисления, чтобы непрерывно отслеживать положение управляющего устройства. И все же такие устройства требуют регулярной калибровки, или они постоянно накапливают ошибку, которая быстро может стать критической, в зависимости от прикладной программы.
Для прикладных программ для промышленного или профессионального применения двух измерений часто бывает недостаточно и имеется потребность в измерении большего количества физических переменных позиционирования. Для этой цели в литературе можно найти несколько решений, например WO 8805942, где показано устройство джойстика, имеющее шесть степеней свободы, в US 5854622, где показан джойстик для измерения движения по шести степеням свободы, или в US 5565891, где показан ручной контролер с шестью степенями свободы. Однако во многих из этих случаев решения являются сложными в использовании и дорогими в производстве, и/или они могут быть трудны в реализации в некоторых прикладных областях, в зависимости от их геометрических размеров и конструкции.
Все вышеупомянутые приложения рассчитаны на ручное управляющее устройство для управления некоторым внешним процессом, таким как компьютерная игра, или для управления оборудованием, транспортным средством или другими машинами. В некоторых областях желательно иметь устройство, которое может измерять положение и перемещение объекта, вставленного в устройство или прикрепленного к нему. Например, при имитации хирургических процедур и т.п. Однако устройства для этой цели часто бывают громоздки, сложны и дороги, а это значит, что имеется потребность в экономически эффективном и надежном решении для таких приложений.
Сущность изобретения
Целью настоящего изобретения является создание управляющего устройства, измеряющего переменные положения в четырех измерениях и с дополнительной возможностью выдавать дополнительные данные для управления, используя в сочетании с измерениями позиционирования отдельные управляющие кнопки.
Согласно первому аспекту настоящего изобретения предлагается управляющее устройство для определения положения объекта с по меньшей мере четырьмя параметрами положения, содержащее:
поворотную структуру;
по меньшей мере один датчик для измерения положения поворотной структуры;
смещающее устройство, осуществляющее линейное смещение и выдающее сигнал, пропорциональный этому линейному смещению,
где по меньшей мере один датчик находится в воспринимающем контакте с поворотной структурой для определения положения поворотной структуры по первому, второму и третьему параметрам положения, при этом смещающее устройство установлено в механическом соединении с поворотной структурой и обеспечивает измерение по четвертому параметру положения, при этом управляющее устройство выполнено с дополнительной возможностью выдачи сигнала, представляющего четыре параметра положения.
Датчик может быть бесконтактным датчиком. Бесконтактный датчик может быть оптическим датчиком или магнитным датчиком, измеряющим магнитные свойства.
Оптический датчик может быть выполнен с возможностью распознавать оптический рисунок на поворотной структуре. Оптический рисунок является заранее сконфигурированном рисунком, повышающим разрешающую способность при определении первого, второго и третьего параметров положения.
Датчик для измерения магнитных свойств может быть выполнен с возможностью измерения магнитного рисунка на поворотной структуре.
Датчик может быть датчиком, измеряющим импеданс, в котором используются токосъемники.
Часть смещающего устройства может быть установлена в отверстии, проходящем по меньшей мере частично сквозь поворотную структуру.
Отверстие сквозь поворотную структуру может проходить, по существу, через центральную часть поворотной структуры.
Первый объект может находиться в механическом соединении со смещающим устройством.
Первый объект, установленный в механическом соединении со смещающим устройством, может быть рукояткой, приводимой в действие пользователем.
Рукоятка может содержать по меньшей мере одно устройство интерфейса, выдающее функциональные сигналы.
Первый объект может быть приемным устройством для приема второго объекта и может содержать зажимное устройство, удерживающее второй объект.
Первый объект, находящийся в механическом соединении со смещающим устройством, может быть медицинским имитационным устройством, выполненным с возможностью принимать медицинский прибор или имитацию медицинского прибора для использования внутри тела млекопитающего.
Медицинским прибором или имитацией медицинского прибора может быть по меньшей мере один из ряда, включающего эндоскоп, лапароскоп, ректоскоп, катетер, стент и ларингоскоп.
Управляющее устройство может дополнительно содержать по меньшей мере один пружинный механизм, прикрепленный к поворотной структуре, обеспечивающий линейное перемещение поворотной структуры в плоскости, перпендикулярной смещающему устройству.
По меньшей мере один датчик и/или смещающее устройство измеряют абсолютные положения первого объекта, прикрепленного к смещающему узлу.
Четыре параметра включают в себя угловые отклонения в двух измерениях, угол поворота вокруг оси, перпендикулярной этим двум измерениям, и параметр линейного смещения в направлении оси, перпендикулярной этим двум измерениям.
Управляющее устройство может дополнительно содержать систему силовой обратной связи, применяемую по меньшей мере к одной поворотной структуре и/или к смещающему устройству.
Эти и другие аспекты изобретения будут очевидны из нижеследующего подробного описания вариантов осуществления настоящего изобретения.
Краткое описание чертежей
Далее следует неограничивающее подробное описание со ссылкой на примерные варианты осуществления настоящего изобретения, иллюстрированные в приложенных чертежах.
Фиг. 1а иллюстрирует вид сбоку управляющего устройства по настоящему изобретению.
Фиг. 1b иллюстрирует вид сверху управляющего устройства по настоящему изобретению.
Фиг. 2 - схематическое изображение обрабатывающего устройства по настоящему изобретению.
Фиг. 3 иллюстрирует подробный вид управляющего устройства по фиг. 1а.
Фиг. 4 иллюстрирует устройство для линейного смещения по настоящему изобретению.
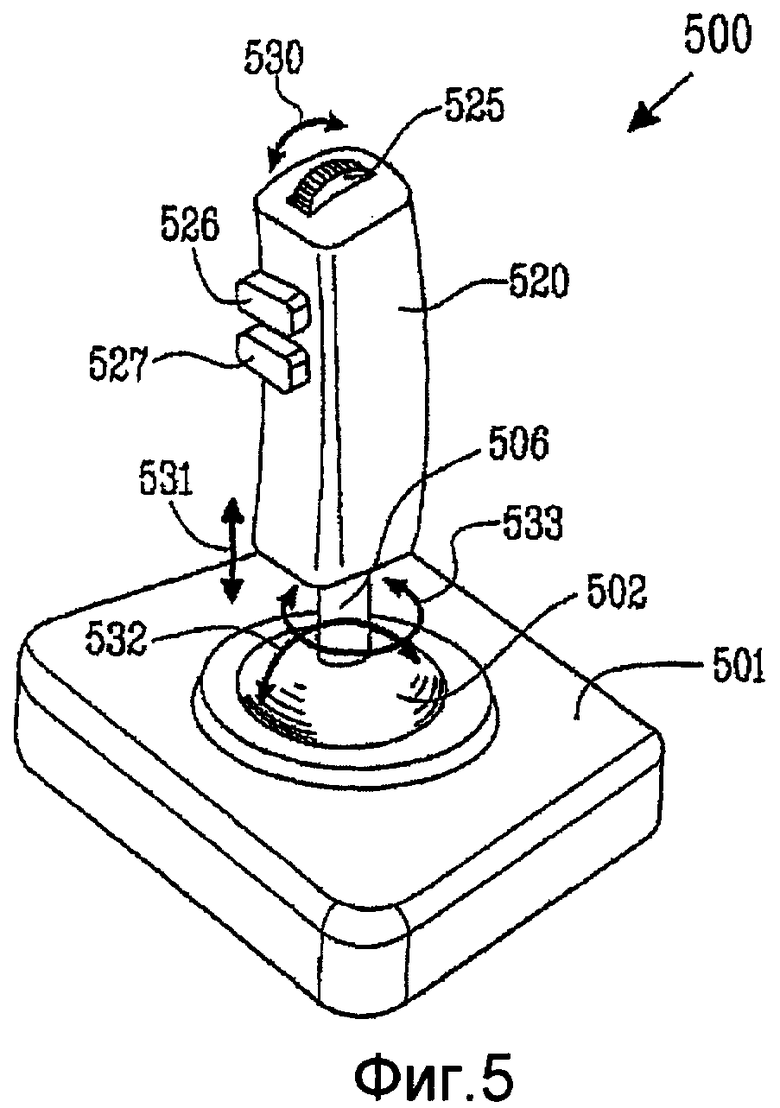
Фиг. 5 иллюстрирует управляющее устройство с рукояткой по настоящему изобретению.
Осуществление изобретения
Согласно настоящему изобретению предлагается управляющее устройство 1, показанное на фиг. 1а и 1b, содержащее поворотную структуру 2 (например, структуру в форме шара), по меньшей мере один датчик 3, 4 и 5, смещающее устройство 6, к которому может быть прикреплен объект 7, и корпус 8, охватывающий некоторые компоненты. Управляющее устройство 1 дополнительно содержит электрические соединители 9 и факультативные кнопки 10, 11 и 12. На фиг. 1а показан схематический вид сбоку устройства 1 по линии 1а на фиг. 1b, а на фиг. 1b показан схематический вид сверху по линии 1b на фиг. 1а.
Поворотная структура 2 может быть прикреплена к корпусу 8 или другим удерживающим структурам пружинами (не показаны) или может свободно вращаться в опоре, имеющей достаточно тугую механическую конструкцию, чтобы удерживать поворотную структуру на месте. Колеса или другие опорные механизмы (не показаны) могут удерживать поворотную структуру 2 в правильном и стабильном положении, чтобы датчики 3, 4 и 5 могли считывать положение поворотной структуры 2. В одном варианте осуществления поворотная структура 2 является шарообразной структурой, однако, поскольку она не должна совершать полный оборот во всех направлениях, она может иметь отклонения от сферической формы, например, она может быть усечена сверху и/или снизу, где выходит смещающее устройство 6.
Смещающее устройство 6 может крепиться в отверстии 13 в поворотной структуре 2, при этом отверстие обеспечивает возможность перемещения смещающего устройства 6 или объекта 7, прикрепленного к смещающему устройству 6, в шаре 2.
Смещающее устройство 6 может быть узлом, измеряющим линейное смещение, в котором одна деталь остается неподвижной, а другая деталь выполнена с возможностью перемещения относительно первой детали, например, внешняя деталь 15 закреплена относительно поворотной структуры 2, а внутренняя деталь 14 выполнена подвижной в одном направлении относительно неподвижной внешней детали 15. В линейное смещающее устройство 6 встроено некоторое воспринимающее средство, измеряющее относительное положение внутренней детали 14 относительно внешней детали 15. Специалистам в данной области техники должно быть понятно, что функции внешней детали 15 и внутренней детали 14 можно поменять местами в отношении как расположения воспринимающего средства, так и в отношении закрепления детали относительно поворотной структуры 2. Под термином "линейный" в отношении линейного смещающего устройства 6 понимается механическая функция; однако электрический сигнал, генерируемый в результате перемещения, не обязательно должен быть линейным, а может быть любой калиброванной функцией, как понятно специалистам в данной области техники. В зависимости от варианта применения управляющего устройства 1 для линейного смещения могут использоваться разные решения. В некоторых случаях смещающее устройство 6 может проходить сквозь поворотную структуру 2 и даже выступать снизу поворотной структуры 2 или даже из корпуса 8. В таких ситуациях смещающее устройство 6 может содержать длинный вал или подобную структуру, подвижную относительно неподвижной детали устройства 6. Однако, если смещающее устройство 6 не проходит сквозь и/или под поворотную структуру, та деталь смещающего устройства 6, которая выполнена подвижной относительно фиксированной детали, может быть телескопической. В том случае, когда смещающее устройство 6 не проходит сквозь поворотную структуру, в нем может быть установлена пружина, для того чтобы возвращать подвижную деталь в исходное положение, при этом пружина может быть расположена внутри поворотной структуры 2 в нижней части отверстия 13, при этом отверстие 13 не проходит насквозь поворотную структуру 2.
К корпусу 8 прикреплен по меньшей мере один датчик 3, 4 и 5, измеряющий одну или множество переменных, зависящих от положения. Они используются для определения абсолютного положения поворотной структуры по трем угловым положениям. Датчики 3, 4 и 5 могут быть оптическими датчиками, считывающими рисунок на поверхности поворотной структуры 2. Оптический датчик может быть камерой, получающей изображение рисунка и по соответствующему изображению рассчитывающей положение поворотной структуры 2 по трем угловым переменным. Используя заранее сконфигурированный рисунок, известный системе обработки изображений, можно получить повышенное разрешение этих переменных. Такими тремя углами могут быть угол наклона в направлениях x и y и угол поворота вокруг оси, проходящей в направлении z, перпендикулярно плоскости, определенной направлениями x и y. Смещающее устройство 6 и отверстие 13 могут быть расположены так, чтобы их продольное направление совпадало с направлением z.
Датчики могут быть расположены с соответствующими углами вокруг периферии поворотной структуры 2, как понятно специалистам в данной области техники, например, при использовании трех датчиков 3, 4 и 5 они могут располагаться с интервалом 120о вокруг поворотной структуры 2. Они также могут быть расположены в разных плоскостях, например, два датчика 3 и 4 в одной плоскости, перпендикулярной оси линейного смещающего устройства 6 в отпущенном (нейтральном) положении, а один датчик 5 может быть расположен в другом положении, отнесенном от этой плоскости (например, непосредственно под поворотной структурой 2, под нижним концом поворотной структуры 2 или в положении между нижним концом и плоскостью, определенной выше).
Кнопки 10, 11 и 12 можно использовать для разных функций, например включения/выключения, сброса, или для дополнительной функциональности в комбинации с движением поворотной структуры 2 и/или смещающего устройства 6. Управляющее устройство 1 может включать в себя кнопки или другие устройства интерфейса на рукоятке и т.п., прикрепленной к смещающему устройству 6 для удобной реализации дополнительных функций, позволяя одной рукой манипулировать оборудованием, управляемым управляющим устройством 1. Примеры такой дополнительной функциональности и интерфейсных решений приведены ниже в разделе, где описываются различные варианты применения.
Все движущиеся детали управляющего устройства, включая функциональные кнопки или другие устройства пользовательского интерфейса, могут быть снабжены пружинными механизмами для их возврата в исходное положение.
В предпочтительном варианте осуществления для определения углового положения поворотной структуры 2 используются два оптических датчика 3 и 4, расположенные под углом 90° или 120° между ними, однако настоящее изобретение не ограничивается таким количеством датчиков. Можно использовать большее или меньшее количество датчиков. Оптические датчики могут быть, например, КМОП-структурами (комплементарный металло-оксидный полупроводник), ПЗС-структурами (прибор с зарядовой связью), получающими изображение рисунка поверхности поворотной структуры 2. Для отслеживания характеристик рисунка и определения относительного перемещения от изображения к изображению используется обработка изображений. Путем предварительного нанесения известного рисунка, содержащего уникальные признаки, на поверхность можно измерять абсолютное положение поворотной структуры. При наличии одного оптического датчика и путем обработки изображения, не имеющего заранее сконфигурированного рисунка, можно получить систему, определяющую относительное положение. При наличии одного датчика 3 и заранее сконфигурированного рисунка возможно абсолютное позиционирование поворотной структуры, используя отслеживание изображений. В другом варианте осуществления для обнаружения и определения абсолютного или относительного положения поворотной структуры 2 можно использовать один или несколько магнитных датчиков 3, 4 и 5, которые измеряют магнитный рисунок и осуществляют отслеживание похожего магнитного рисунка так же, как и оптическая система.
Рисунок должен иметь подходящие размеры и тип в зависимости от используемого воспринимающего элемента, например при использовании оптического датчика размер должен быть согласован с разрешающей способностью и размером области изображения.
Сигналы от датчиков 3, 4 и 5 и от смещающего устройства 6 передаются на обрабатывающее устройство 200, показанное на фиг. 2, через соединитель 207 для обработки изображения и формирования сигнала для получения сигнала или сигналов, указывающих на положение поворотной структуры 2 и смещающего устройства 6 для некоторого внешнего устройства, соединенного с обрабатывающим устройством через соединитель 203. Обрабатывающее устройство может включать в себя процессор 201, запоминающее устройство (или устройства) 202, устройство 204 обработки изображений и другие устройства 205 и 206 в зависимости от варианта применения управляющего устройства. Обрабатывающий узел может иметь коммуникационный интерфейс для связи с внешними устройствами или дополнительными устройствами, прикрепленными к управляющему устройству 1. К таким дополнительным устройствам, помимо прочих, могут относиться устройство силовой обратной связи, зажимные устройства или подобные взаимодействующие устройства для взаимодействия с пользователем управляющего устройства. Интерфейс для связи с внешними устройствами или входы внутренних датчиков могут быть реализованы с помощью любого подходящего соединителя или соединителей, как понятно специалистам в данной области техники, включая, помимо прочего, USB (универсальная последовательная шина), Firewire, RS232, RS485, Ethernet, параллельный порт Centronics, GPIB (универсальная интерфейсная шина), различные беспроводные интерфейсы (например, Bluetooth и WLAN) и т.д. Все перечисленные интерфейсы соответствуют существующим стандартным интерфейсам, однако следует понимать, что применяемые интерфейсы могут быть созданы по стандартам, которые появятся в будущем, или даже быть нестандартными интерфейсами.
Преимущественно можно использовать средство бесконтактного датчика, поскольку поворотная структура 2 заключена в корпус 8 управляющего устройства 1, однако датчики такого типа можно использовать даже без такого охвата кожухом. Следовательно, имеется небольшое количество помех, которые могут влиять на считывание, таких как грязь, свет или блуждающие магнитные поля. В одном варианте осуществления корпус 8 выполнен из электропроводного материала со свойствами магнитного экрана, чтобы уменьшить риск наводок на магнитный датчик, измеряющий положение поворотной структуры 2.
Однако настоящее изобретение не ограничивается бесконтактными измерениями положения поворотной структуры 2, можно использовать и контактные датчики, включая, помимо прочего, токосъемники, измерители импеданса, делители напряжения, цифровые датчики положения и емкостные датчики.
На фиг. 3 подробно показано управляющее устройство 1 по настоящему изобретению. В этом случае смещающее устройство 6 может проходить сквозь поворотную структуру 2 и далее под нее в нижнюю часть корпуса или даже дальше, если это применимо в зависимости от варианта применения и способа монтажа. Удерживающая структура 17 для удержания поворотной структуры снабжена отверстием 18, которое имеет размер, превышающий размер подвижной детали 14 смещающего устройства 6. Это необходимо, чтобы обеспечить возможность наклона в направлениях х и y. Например, допустимый диапазон наклона в направлениях х и y может определять корпус 8 или для той же цели может использоваться удерживающая структура 17. Датчики 3 и 5 для определения положения поворотной структуры 2 могут быть размещены в удерживающей структуре 17 или на ней. Сигналы от датчиков 3 и 5 проходят по сигнальным линиям 21 и 22 на обрабатывающее устройство 200 для обработки. Сигналы от смещающего устройства 6 также могут проходить на обрабатывающее устройство 200 по соответствующей сигнальной линии или линиям (не показаны). Число датчиков и сигнальных линий не ограничено показанным количеством и их может быть больше или меньше в зависимости от варианта применения и типа и количества применяемых датчиков. Таким же образом сигналы от функциональных кнопок 10, 11 и 12 или любого другого интерфейсного функционального устройства подаются по соответствующим сигнальным линиям на обрабатывающее устройство 200.
На фиг. 4 показано линейное смещающее устройство 6, используемое в настоящем изобретении. Однако, как понятно специалистам в данной области техники, можно использовать и другие типы смещающих устройств. На фиг. 4 внешняя часть 15 и внутренняя часть 14 выполнены с возможностью перемещения относительно друг друга и электрические соединители для измерения положения этих двух деталей относительно друг друга могут быть расположены на внешней детали 15 или на внутренней детали 14. Объект 7 может быть расположен, прикреплен или находиться в механическом соединении либо с внутренней деталью 14, либо с внешней деталью 15. На фиг. 4 он прикреплен к внутренней детали 14. Объект 7 может быть, например, рукояткой, возможно содержащей дополнительные устройства управляющего интерфейса (кнопки, переключатели или реле), приемным устройством для приема другого позиционируемого объекта (например, для имитации или эмуляции хирургического инструмента) или выравнивающего устройства, используемого для выравнивания удаленных объектов. Дополнительные примеры могут быть найдены ниже в разделе, описывающем варианты применения настоящего изобретения.
Управляющее устройство с четырьмя параметрами положения может быть использовано как устройство для определения угла благодаря высокой точности измерения углов, которая достигается при использовании заранее сконфигурированного рисунка на поверхности поворотной структуры 2. Система для такого типа применения должна иметь рисунок, настроенный под выбранный датчик, т.е. размеры частей рисунка должны быть достаточно малы, чтобы каждый раз в поле зрения датчика попадала соответствующая часть рисунка. Например, для оптического датчика, считывающего изображение, должны быть видимы несколько частей рисунка. Однако рисунок не должен быть слишком мал, поскольку существует риск, что датчик изображения потеряет детали из-за ограниченной разрешающей способности элемента датчика изображения, что приведет к ошибке считывания.
Многомерное управляющее устройство может найти применение в компьютерных играх, в управлении транспортными средствами (рулевое управление легковых и грузовых автомобилей, самолетов, вертолетов, автобусов), в управлении машинами, например, в тяжелом строительном оборудовании (экскаваторы, погрузчики, шахтное оборудование и пр.) и в кранах, а также для имитаторов. Имитаторы применяются в различных областях, например, для подготовки пилотов, операторов станков, врачей и т.д. На фиг. 5 показан вид в перспективе управляющего устройства 500 для использования в играх и для профессионального применения. Управляющее устройство 500 содержит плиту 501 основания, поворотную структуру 502, смещающее устройство 506, рукоятку 520, колесико 252 прокрутки и функциональные кнопки 526 и 527. Плита 501 основания может быть предназначена для автономного применения, когда управляющее устройство 500 используется, например, для игр и должно стоять на столе, или для ношения или монтажа, например, в профессиональном применении (например, как управляющее устройство для оборудования), для постоянного или съемного крепления управляющего устройства в соответствующем месте на оборудовании, которым управляют, или рядом с ним. Управляющее устройство 501 далее содержит рукоятку 520, обеспечивающую возможность захвата рукой, и факультативные кнопки 526 и 527 и/или колесико 525 прокрутки для создания дополнительной функциональности и сигналов управления движением для оборудования, которым осуществляется управление. Колесико 525 прокрутки может также выполнять функцию двухпозиционного переключателя, который выдает сигналы, представляющие два направления (например, вперед и назад) движения. Рукоятка 520 механически соединена со смещающим устройством 506, и когда оператор перемещает ее вверх или вниз, она соответственно перемещается, и смещающее устройство 506 генерирует сигналы, представляющие такое перемещение. В то же время смещающее устройство 506 находится в механическом соединении с поворотной структурой 502, обеспечивающей возможность наклона в направлениях x и y и поворота вокруг оси z, как описано выше. Датчики, измеряющие движение поворотной структуры 502, генерируют сигналы, представляющие такие смещения. Внутри управляющего устройства 501 расположено обрабатывающее устройство для обработки сигналов от различных датчиков и функциональных интерфейсов (кнопок, переключателей и реле) и выдачи сигналов на оборудование, находящееся под управлением, например на компьютер, управляющий компьютерной игрой, или на обрабатывающее устройство, управляющее оборудованием. Такие сигналы, как понятно специалистам в данной области техники, могут передаваться через любой подходящий соединитель (не показан), включая, помимо прочего, USB (универсальная последовательная шина), Firewire, RS232, RS485, Ethernet, параллельный порт Centronics, GPIB (универсальная интерфейсная шина), различные беспроводные интерфейсы (например, Bluetooth и WLAN) и т.д. Стрелки 531, 532 и 533 показывают некоторые из возможных направлений смещения управляющего устройства 500, стрелка 530 показывает направление смещения колесика 525 прокрутки. Стрелка 532 показывает одно направление наклона управляющего устройства 500, однако, могут существовать и другие направления наклона на всех 360о периферии рукоятки 520 шара 502.
Управляющее устройство 1 по настоящему изобретению может использоваться как интерфейсное устройство для компьютера при использовании в компьютерных играх и т.п. или как интерфейсное устройство в имитаторе (например, в имитаторе полета). В одном варианте осуществления множество управляющих устройств 1 соединены с единым интерфейсным устройством (не показано), например два управляющих устройства 1 по настоящему изобретению, где одно управляющее устройство используется для управления одним процессом, а другое управляющее устройство используется для управления другим процессом. Например, в игровых применениях (в компьютерных играх) одно устройство может использоваться для управления перемещениями видимого персонажа, а второе управляющее устройство используется для управления устройством, которое несет этот персонаж (например, оружие и т.п.). Таким образом, пользователь может одновременно управлять несколькими функциями или действиями одновременно. Такое сдвоенное управляющее устройство может использоваться для управления и другим оборудованием, как понятно специалистам в данной области.
Управляющее устройство 1 по настоящему изобретению можно использовать при эксплуатации, обучении и/или программировании роботов. Оператор может управлять роботом, используя управляющее устройство 1 при эксплуатации робота или при программировании робота на автоматическое выполнение задач. Роботом в этом случае может быть устройство, используемое в автоматизированных производственных процессах, например на сборочных линиях на заводах и т.п.
При обучении профессионалов в области медицины, например врачей, хирургов или специалистов в области ветеринарии для инвазивной или неинвазивной хирургии тела млекопитающего, используются имитационные и/или эмулирующие устройства. Они позволяют вводить через проколы в имитационное или эмулирующее устройство (далее именуемое имитационное устройство) хирургические инструменты или диагностические приборы, такие как лапароскопические и другие инструменты, для минимальной инвазивной хирургической операции или диагностики, такие как лапароскопы, катетеры, стенты, ларингоскопы или эндоскопы, чтобы человек, использующий такое имитационное устройство, имел ощущение реальной среды. Могут представлять интерес и другие области медицины, например ректоскопия, гинекологические исследования и стоматология. На экране компьютера обучающийся видит имитируемый прибор и его движения в соответствии с сигналами датчика, измеряющими движение хирургического инструмента, введенного в имитационное устройство. В таких случаях найдет применение управляющее устройство 1 по настоящему изобретению. Хирургическое устройство вводится в отверстие в корпусе 8 управляющего устройства 1, и приемный механизм 7 принимает хирургическое устройство и удерживает его во время имитации. Приемный механизм может быть встроен в смещающее устройство 6 и, таким образом, иметь возможность перемещаться в направлении z и наклоняться в направлениях х и y, а также поворачиваться вокруг оси z. Управляющее устройство измеряет смещение хирургического устройства в направлении z, поворот вокруг оси z и наклон в направлениях х и y. Обрабатывающее устройство измеряет положение хирургического инструмента и передает данные, представляющие это положение, на обрабатывающую систему имитационного устройства, которое использует эти данные для обновления на экране компьютера изображения инструмента относительно имитируемого устройства.
Одновременно с управляющим устройством 1 можно использовать более чем один имитационный хирургический инструмент, например, прикрепив несколько приемных механизмов 7 параллельно или последовательно друг с другом или к смещающему устройству 6.
В вариантах использования, относящихся к такому типу, предпочтительно использовать механическую интерактивную обратную связь, а также визуальную обратную связь, которую обеспечивает экран компьютера. В такой механической интерактивной обратной связи применяется силовая обратная связь, дающая пользователю ощущение усилий, которые могут встречаться в реальной ситуации. Зажимные или фрикционные устройства могут при обучении создавать реалистические силы трения для определенных ситуаций, например при имитации проникновения инструмента сквозь стенку сосуда, поворотов или изгибов сосудов, встречи с костью или взаимодействия с другими частями тела. Например, удерживающее устройство, принимающее инструмент, может быть выполнено с возможностью удерживать инструмент с определенной силой и позволять смещать инструмент или требовать приложения усилия к линейному смещающему устройству 6 и/или к поворотной структуре 2.
В другом варианте применения настоящего изобретения может использоваться прибор для измерения наклона или нивелир. Прицельное устройство может размещаться на смещающем устройстве, и оператор удерживает рукоятку, прикрепленную к смещающему устройству, и нацеливает прицельное устройство на объект, выравниваемый с помощью прибора для измерения наклона. Когда объект будет выровнен надлежащим образом, в прицельном устройстве, можно считать соответствующие параметры наклона и положения по оси z с дисплея устройства для измерения наклона или передать их на отдельное считывающее устройство, например компьютер. Эта процедура может применяться для выравнивания или для измерения положения удаленного объекта.
В еще одном варианте применения настоящего изобретения может использоваться цифровой планшет. Цифровой планшет используется для определения физической структуры объекта путем определения множества внешних ограничивающих точек на объекте. Это делается путем подведения щупа (прикрепленного к смещающему устройству 6) к объекту и считывания параметров положения, связанных с этой точкой, используя четыре параметра положения, даваемые управляющим устройством по настоящему изобретению, теперь действующему как считывающее устройство. Для увеличения гибкости смещения (т.е. количества степеней свободы) считывающего устройства могут потребоваться один или несколько рычажных механизмов.
Следует отметить, что слово "содержащий" не исключает наличия других элементов или шагов, помимо перечисленных, а также не исключается наличие множества таких элементов. Далее следует отметить, что позиции не ограничивают объем формулы, и изобретение может быть реализовано и программными, и аппаратными средствами, и несколько "средств" могут быть представлены одним и тем же аппаратным средством.
Вышеописанные варианты приведены лишь для примера и не ограничивают настоящее изобретение. Специалистам очевидны другие решения, варианты применения, цели и функции, входящие в объем настоящего изобретения, определенный в прилагаемой формуле изобретения.




Изобретение относится к области приборостроения. Техническим результатом является упрощение и снижение стоимости производства. Управляющее устройство (1) предназначено для определения четырех параметров положения объекта (7), прикрепленного к смещающему устройству (6) и содержащего, по меньшей мере, один датчик, поворотную структуру (2) с тремя определяемыми параметрами положения: наклон в направлениях х и у и угол поворота вокруг оси z; четвертым параметром является положение смещающего устройства (6) на оси z. Смещающее устройство (6) обеспечивает линейное смещение и сигнал, пропорциональный этому линейному смещению. Устройство (1) выполнено с возможностью выдачи сигнала, представляющего эти четыре параметра. 19 з.п. ф-лы, 6 ил.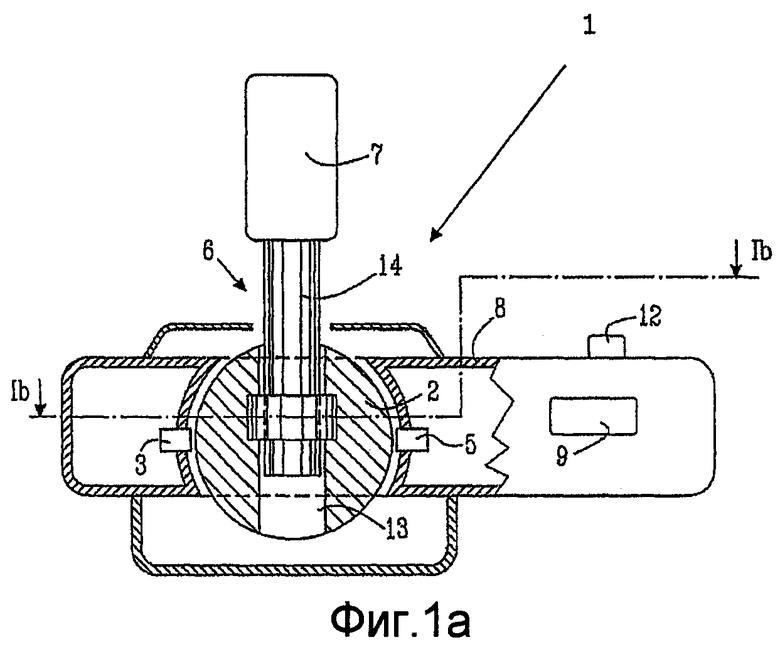
1. Управляющее устройство (1) для обеспечения, по меньшей мере, четырех параметров положения, содержащее:
поворотную структуру (2);
по меньшей мере, один датчик (3, 4, 5) для измерения положения упомянутой поворотной структуры;
смещающее устройство (6), обеспечивающее линейное смещение и сигнал, пропорциональный этому линейному смещению;
при этом, по меньшей мере, один датчик (3, 4, 5) находится в воспринимающем контакте с поворотной структурой (2) для определения положения поворотной структуры (2) по первому, второму и третьему параметрам положения, при этом смещающее устройство (6) находится в механическом соединении с поворотной структурой (2) и обеспечивает измерение по четвертому параметру положения, при этом управляющее устройство выполнено с дополнительной возможностью выдавать сигнал, представляющий эти четыре параметра положения.
2. Устройство по п.1, в котором датчик (3, 4, 5) является бесконтактным датчиком.
3. Устройство по п.2, в котором бесконтактный датчик (3, 4, 5) является оптическим датчиком.
4. Устройство по п.3, в котором оптический датчик (3, 4, 5) выполнен с возможностью определять оптический рисунок на поворотной структуре (2).
5. Устройство по п.4, в котором оптический рисунок является заранее сконфигурированным рисунком, повышающим разрешающую способность при определении первого, второго и третьего параметров положения.
6. Устройство по п.2, в котором датчик (3, 4, 5) является датчиком для измерения магнитных свойств.
7. Устройство по п.6, в котором датчик (3, 4, 5) для измерения магнитных свойств выполнен с возможностью измерения магнитного рисунка на поворотной структуре (2).
8. Устройство по п.1, в котором датчик (3, 4, 5) является датчиком для измерения импеданса, использующим токосъемники.
9. Устройство по п.1, в котором часть смещающего устройства (6) установлена в отверстии, проходящем, по меньшей мере, частично сквозь поворотную структуру (2).
10. Устройство по п.9, в котором отверстие в поворотной структуре проходит, по существу, через центральную часть поворотной структуры (2).
11. Устройство по п.1, в котором первый объект (7) находится в механическом соединении со смещающим устройством (6).
12. Устройство по п.11, в котором первый объект (7), находящийся в механическом соединении со смещающим устройством, является рукояткой, приводимой в действие пользователем.
13. Устройство по п.12, в котором рукоятка содержит, по меньшей мере, одно устройство (525, 526, 527) интерфейса, выдающее функциональные сигналы.
14. Устройство по п.11, в котором первый объект (7) является приемным устройством для приема второго объекта и содержит зажимное устройство, удерживающее второй объект.
15. Устройство по п.11, где первый объект (7), находящийся в механическом соединении со смещающим узлом, является медицинским имитационным устройством, выполненным с возможностью принимать медицинский прибор или имитацию медицинского прибора для использования внутри тела млекопитающего.
16. Устройство по п.15, в котором медицинский прибор или имитация медицинского прибора является, по меньшей мере, одним из ряда, содержащего эндоскоп, лапароскоп, ректоскоп, катетер, стент и ларингоскоп.
17. Устройство по п.1, дополнительно содержащее, по меньшей мере, один пружинный механизм, прикрепленный к поворотной структуре (2), обеспечивающий возможность линейного перемещения этой поворотной структуры (2) в плоскости, перпендикулярной смещающему устройству (6).
18. Устройство по п.11, в котором, по меньшей мере, один датчик (3, 4, 5) и смещающее устройство (6) измеряют абсолютное положение первого объекта (7), прикрепленного к смещающему узлу (6).
19. Устройство по п.1, в котором четыре параметра включают в себя угловые отклонения в двух измерениях, угол поворота вокруг оси, перпендикулярной этим двум измерениям, и параметр линейного смещения в направлении оси, перпендикулярной этим двум измерениям.
20. Устройство по п.1, дополнительно содержащее систему силовой обратной связи, применяемую, по меньшей мере, к одной поворотной структуре (2) и/или к смещающему устройству (6).
| US 20040003985 A1, 08.01.2004 | |||
| ПЕРЕКЛЮЧАТЕЛЬ ДЛЯ КОММУТАЦИИ ЭЛЕКТРИЧЕСКИХ ЦЕПЕЙ | 1991 |
|
RU2016439C1 |
| RU 99125231 A1, 20.01.2002 | |||
| RU 99107230 A1, 10.03.2001 | |||
| DE 10012436 A1, 11.10.2001 | |||
| Устройство для изготовления запоминающих матриц на биаксах | 1985 |
|
SU1293756A1 |
| US 5559432 A, 24.09.1996. | |||

