Уровень техники
Многие медицинские процедуры, например, такие как ангиопластические операции, могут представлять трудности даже для опытных специалистов. При выполнении ангиопластических процедур, таких как процедура баллонной ангиопластики, служащая для ликвидации закупорок кровеносных сосудов, врач может вводить и манипулировать несколькими операционными инструментами, например, проволочными проводниками, катетерами и интродьюсерами, в артериальной сети пациента, пока не достигнет точки закупорки. В процессе хирургической навигации в артериальной сети пациента врач может вводить в артериальную сеть контрастную жидкость, чтобы обеспечить возможность визуального осмотра местонахождения инструментов в артериальной сети с помощью дисплея (напр., на флуороскопическом экране под непрерывным рентгеновским излучением). Операционный инструмент (инструменты) включают проволочный проводник, коаксиально расположенный внутри катетера, который, в свою очередь, коаксиально расположен внутри интродьюсера. При достижении точки закупорки катетер заменяют ангиопластическим катетером, содержащим баллон, который наполняют воздухом, чтобы открыть закупоренный сосуд. После этого в зону закупорки помещают стент, а баллон убирают.
Медицинские процедуры, такие как процедура баллонной ангиопластики, включающие точные, координированные движения рук, пространственно не связанные с изображением дистанционно управляемых операционных инструментов на видеомониторе, могут представлять ряд трудностей. Глубина проникновения на плоском видеодисплее не показана, поэтому нелегко научиться управлять инструментами, субъективно устанавливая пространственные связи. Ошибка, допущенная в этой сложной среде, может оказаться опасной. Поэтому от врача требуется высокий уровень мастерства, и практическая подготовка таких специалистов представляет собой сложную задачу. Например, преподаватель или инструктор может руководить действиями врача-практиканта, манипулирующего операционными инструментами внутри артериальной сети пациента, возможно, страдающего болезнью сердца или испытывающего сердечный приступ.
Процедуры с визуализационным контролем, такие как сосудистая катетеризация, ангиопластика и установка стента, специально приспособлены для имитации, поскольку, как правило, при их выполнении врач находится на расстоянии от места проведения операции, манипулируя операционными инструментами и наблюдая за процедурами на видеомониторах. Для обучения врачей ангиопластическим процедурам разработаны несколько систем. Эти системы имитируют реальные тактильные ощущения, которые испытывает пользователь, когда со стороны артериальной сети прикладывается сила к каждому инструменту, и отображают для пользователя имитирующее изображение (напр., рентгеновское изображение) операционного инструмента внутри артериальной сети.
Длина операционных инструментов, используемых в эндоваскулярных процедурах, требует, чтобы имитатор был длинным, делая существующие имитирующие системы длинными, тяжелыми и затрудняя их перемещение, например, для презентаций или учебных занятий в различные медицинские учреждения или даже в другое подразделение того же медицинского учреждения. Кроме того, усложняется техническое обслуживание таких систем. Например, каждый раз при обнаружении неисправности в одном из компонентов системы (таком как датчик) всю систему приходится отправлять обратно к производителю. Поскольку для контроля и управления различными операционными инструментами (например, каждая система имеет три различных датчика) используются различные компоненты, необходимо, чтобы замену и калибровку этих датчиков выполнял производитель.
Сложные системы для имитации, которые содержат один или несколько датчиков, могут утратить текущую калибровку из-за перемещения системы или вследствие постоянного взаимодействия с инструментами, при этом для приведения имитатора в рабочее состояние может потребоваться повторная калибровка, выполняемая техническим специалистом. В связи с необходимостью имитации различных перемещаемых каналов инструментов в соответствии со способом выполнения эндоваскулярных процедур, при наличии нескольких мест введения инструментов в тело пациента, дополнительно требуется, чтобы имитаторы имели несколько каналов, дистальные концы которых также можно объединить.
Краткое описание чертежей
Рассматриваемый объект изобретения конкретно обозначен и четко сформулирован в заключительной части заявки. Однако настоящее изобретение, как в отношении организации операций, так и способа их выполнения, наряду с его объектами, признаками и преимуществами, можно лучше понять из следующего подробного описания, рассматриваемого со ссылкой на прилагаемые чертежи.
На фиг.1 изображен пример складывающейся системы для имитации медицинской процедуры с визуализационным контролем согласно некоторым вариантам настоящего изобретения.
На фиг.2A и 2B изображены примеры съемного рабочего блока согласно некоторым вариантам настоящего изобретения.
На фиг.2C изображен пример операционного инструмента внутри камеры для инструментов согласно некоторым вариантам настоящего изобретения.
На фиг.3A и 3B изображены примеры складывающегося основания согласно некоторым вариантам настоящего изобретения.
На фиг.3C изображен пример складывающегося основания в сложенном положении согласно некоторым вариантам настоящего изобретения.
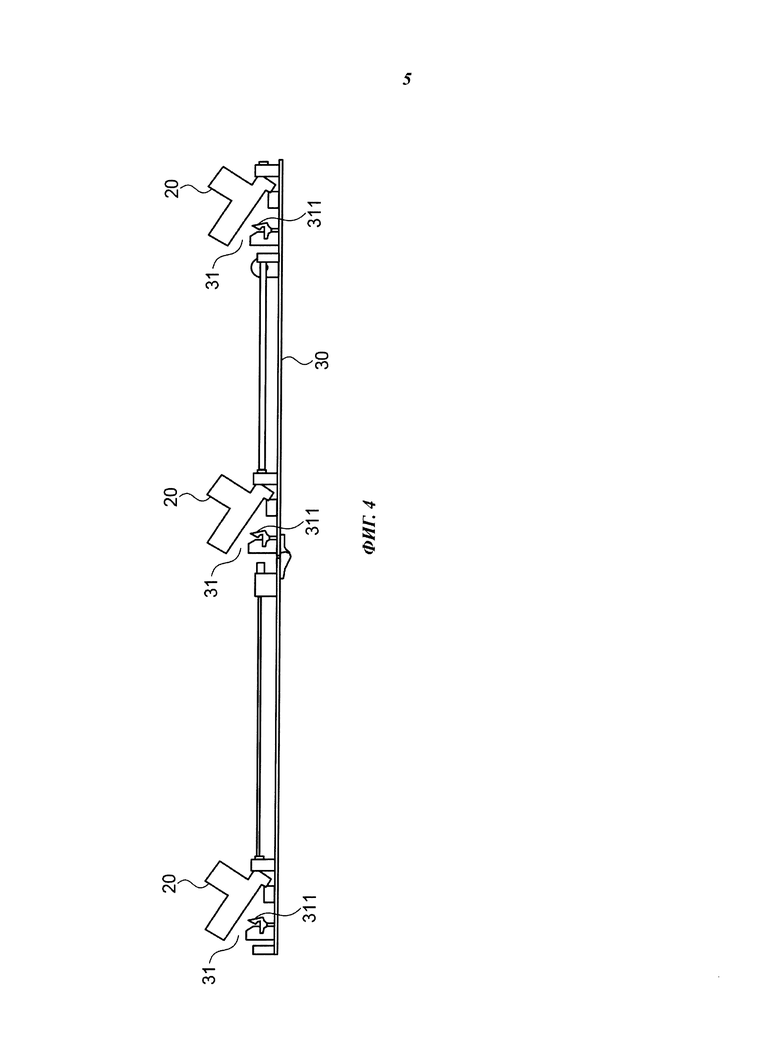
На фиг.4 показано детальное изображение установки рабочих блоков на основании согласно некоторым вариантам настоящего изобретения.
На фиг.5 показана высокоуровневая структурная схема примера имитирующей системы согласно некоторым вариантам настоящего изобретения.
На фиг.6 показана блок-схема, иллюстрирующая способ сборки переносной складывающейся медицинской имитирующей системы согласно некоторым вариантам настоящего изобретения.
На фиг.7 показана блок-схема, иллюстрирующая способ управления складывающейся медицинской имитирующей системой согласно некоторым вариантам настоящего изобретения.
На фиг.8 показана блок-схема, иллюстрирующая способ определения диаметра инструмента согласно некоторым вариантам настоящего изобретения.
Следует понимать, что в целях простоты и ясности изображения элементы, показанные на рисунках, необязательно выполнены в масштабе. Например, размеры некоторых элементов могут быть преувеличены по отношению к другим элементам для наглядности. Кроме того, там, где это представляется целесообразным, номера позиций на чертежах могут повторяться, указывая подобные или аналогичные элементы.
Осуществление изобретения
В следующем подробном описании многочисленные конкретные детали приведены для того, чтобы обеспечить полное понимание изобретения. Однако специалистам в данной области понятно, что настоящее изобретение можно осуществить и без этих конкретных деталей. В других случаях хорошо известные способы, процедуры, компоненты, модули, блоки и/или схемы не были подробно описаны, чтобы не загромождать раскрытие изобретения. Некоторые признаки или элементы, описанные применительно к одному варианту осуществления, могут комбинироваться с признаками или элементами, описанными применительно к другим вариантам осуществления. Для ясности обсуждение одинаковых или сходных признаков или элементов может не повторяться.
Хотя варианты настоящего изобретения в этом отношении не ограничены, обсуждение, в котором используются такие термины, как «обработка», «вычисление», «расчет», «определение», «установление», «анализ», «проверка», «задание», «прием» и им подобные, может относится к операции (-ям) или процессу (-ам), выполняемым контроллером, компьютером, вычислительной платформой, вычислительной системой, или другим электронным вычислительным устройством, которое манипулирует и/или преобразует данные, представляемые в качестве физических (например, электронных) величин в регистрах и/или блоках памяти компьютера, в другие данные, аналогичным образом представляемые в качестве физических величин в регистрах и/или блоках памяти компьютера или других носителях информации, которые могут хранить команды на выполнение операций и/или процессов.
Хотя варианты осуществления настоящего изобретения в этом отношении не ограничены, термины «множество» или «группа», используемые в настоящем описании, могут включать в себя, например, «несколько» или «два или больше». Термины «множество» или «группа» могут использоваться в данном описании изобретения, чтобы охарактеризовать два или большее количество компонентов, устройств, элементов, блоков, параметров и т.п. Если это прямо не предусмотрено, варианты осуществления описанного здесь способа не ограничены каким-либо конкретным порядком или последовательностью. Кроме того, некоторые из описанных вариантов осуществления способа или их элементов могут возникать или выполняться одновременно, в один и тот же момент времени или параллельно.
Некоторые варианты настоящего изобретения относятся к переносной медицинской имитирующей системе для имитации медицинских процедур с визуализационным контролем на основе компьютеризированной анатомической структуры, например, процедур ангиопластики. Система может включать два основных компонента: компьютер, который выполняет программы имитационного моделирования, и пользовательскую систему манипулирования, которая позволяет пользователю (напр., врачу или преподавателю) физически манипулировать операционными инструментами. Пользователь может выбрать тип медицинской процедуры и/или тип операционного инструмента при помощи пользовательского интерфейса, входящего в состав компьютера, при этом компьютер может управлять различными компонентами, входящими в состав пользовательской системы манипулирования, таким образом, чтобы в процессе манипулирования операционным инструментом пользователь мог получать тактильное ощущение реальной силы, приложенной к операционному инструменту, имитирующее усилие, которое было бы приложено к этому инструменту в соответствии с выбранным типом медицинской процедуры. Программное обеспечение имитационного моделирования может включать компьютеризированную анатомическую структуру, имитирующую орган, в котором должна выполняться медицинская процедура, например, артериальную сеть, при этом компьютер может отображать для пользователя имитирующее изображение компьютеризированной анатомической структуры, которое имитирует реалистичное изображение органа, появившегося бы на реальном дисплее во время реальной медицинской процедуры. Например, рентгеновское изображение артериальной сети.
В некоторых вариантах осуществления система согласно настоящему изобретению может быть упакована в обычный небольшой чемодан, например, размерами 56 см × 36 см × 23 см, который пассажир может перевозить в самолете в качестве ручной клади. Несколько компонентов можно легко демонтировать и извлечь из пользовательской системы манипулирования, при этом система может складываться. Повторная сборка имитирующей системы может быть выполнена одним человеком, причем каждый элемент системы может быть смонтирован с использованием механизма «подсоединяй и работай», например, при помощи одного или двух действий. Пользовательская система манипулирования может включать складывающееся основание, которое можно сложить и упаковать в чемодан. Пользовательская система манипулирования может также включать различные компоненты, выполненные с возможностью отслеживания движений различных операционных инструментов и приложения силы к одному или нескольким инструментам. Набор компонентов, выполненных с возможностью отслеживания движений и приложения силы к одному инструменту, может быть собран в единый рабочий блок. Два или несколько рабочих блоков, установленных в пользовательской системе манипулирования, могут быть по существу идентичными друг другу, поэтому любой рабочий блок может быть установлен на основании в любом положении. После стыковки с основанием каждый компонент рабочего блока можно разместить в правильном положении и выполнить автоматическую калибровку для отслеживания движений и приложения силы к различным инструментам. Рабочие блоки могут быть съемными (для удобства установки на основании и демонтажа).
В некоторых вариантах осуществления система может включать складывающееся основание (входящее в состав пользовательской системы манипулирования) и один или несколько съемных рабочих блоков, каждый из которых выполнен с возможностью отслеживания движений и приложения силы к различным инструментам. Рабочие блоки могут быть по существу идентичными. Рабочие блоки согласно некоторым вариантам настоящего изобретения могут быть установлены в любой медицинской имитирующей системе.
В некоторых вариантах осуществления система может включать складывающееся основание, а каждый из компонентов, выполненных с возможностью отслеживания движений и приложения силы к инструментам, может быть смонтирован непосредственно на этом основании. Такая система не включает съемные рабочие блоки.
В некоторых вариантах осуществления система может включать нескладывающееся основание и один или несколько съемных рабочих блоков, каждый из которых служит для отслеживания движений и приложения силы к другому инструменту. Рабочие блоки могут быть по существу идентичными.
Обратимся к фиг.1, на котором представлен пример системы для имитации медицинской процедуры с визуализационным контролем согласно некоторым вариантам настоящего изобретения. Как показано на рисунке, система 10 может включать два или несколько съемных рабочих блоков 20, собранных и состыкованных с одной или несколькими складывающимися основаниями 30. Инструмент 5, предназначенный для манипуляции, выполняемой пользователем, можно вставить в отверстие в основании 30. Инструмент 5 может включать два или несколько коаксиальных инструментов, вставленных один в другой. Управление системой может осуществляться при помощи контроллера 40, который может управлять различными компонентами, входящими в состав каждого из рабочих блоков 20, для отслеживания движения операционного инструмента 5 и приложения силы к инструменту на основе имитирующей программы, выбранной пользователем. В некоторых вариантах осуществления система может включать также имитационную систему введения (не показана), предназначенную, например, для имитации введения контрастной жидкости. В некоторых вариантах осуществления контроллер 40 может быть встроенным в основание 30.
Инструмент 5 может включать два или несколько коаксиальных инструментов, вставленных один в другой, как показано на фиг.1. Например, инструмент 5 может включать интродьюсер, содержащий катетер (такой как баллонный катетер). Еще в одном варианте инструмент 5 может включать проволочный проводник, вставляемый в катетер. В некоторых вариантах осуществления катетер, содержащий проволочный проводник, может вставляться в интродьюсер, образуя трехкоаксиальное расположение инструментов. В некоторых вариантах осуществления инструмент 5 может включать единственный инструмент, например, баллонный катетер.
В системе, изображенной на фиг.1, на каждом из двух складывающихся оснований 30 установлены по три рабочих блока 20. Рабочий блок 20, установленный в положении A, может прикладывать силу и отслеживать движение интродьюсера, имеющего диаметр приблизительно 2-5 мм, рабочий блок 20, установленный в положении B, может прикладывать силу и отслеживать движение катетера, имеющего диаметр приблизительно 0,5 мм, а рабочий блок 20, установленный в положении C, может прикладывать силу и отслеживать движение проволочного проводника, имеющего диаметр 0,1 мм. Все рабочие блоки 20 могут быть по существу идентичными и выполненными с возможностью манипулирования операционным инструментом, имеющим любой диаметр.
Контроллер 40 может быть выполнен с возможностью управления процедурой с визуализационным контролем путем отслеживания движения инструмента (т.е. при помощи данных слежения) в ответ на манипулирование инструментами пользователем, прикладывая к инструменту силу, имитирующую силу, которую к инструменту приложил бы орган, и предоставляя пользователю имитацию реалистичного изображения (например, рентгеновского изображения) органа пациента (например, артериальной сети) и местоположение каждого операционного инструмента в имитационной модели.
В некоторых вариантах осуществления система 10 может также включать один или несколько шприцев и ножную педаль (не показаны) для имитации реальной медицинской процедуры. В ходе реальной медицинской процедуры, для получения изображения операционного инструмента внутри органа, такого как рентгеновское изображение, врач должен ввести контрастную жидкость в кровеносную систему пациента при помощи шприца, а затем привести в действие рентгеновский аппарат при помощи ножной педали. Система 10 может включать первый шприц, обеспечивающий реалистичную имитацию введения контрастной жидкости пациенту, и ножную педаль для загрузки реалистичного изображения моделируемого операционного инструмента внутри компьютеризированной анатомической структуры. Первый шприц может содержать измеритель, а ножная педаль может содержать переключатель, при этом педаль и шприц могут осуществлять связь с контроллером 40 таким образом, чтобы, когда пользователь нажимает на первый шприц и наступает на педаль, на дисплее 50 отображалось имитирующее рентгеновское изображение (или другое изображение). В некоторых вариантах осуществления система 10 может включать второй шприц для имитации надувания баллона при установке стента в рамках имитируемой процедуры ангиопластики. Второй шприц может включать измеритель и осуществлять связь с контроллером 40 таким образом, чтобы, когда пользователь нажимает на второй шприц, программа имитационного моделирования отображала на дисплее 50 имитирующее изображение надутого баллона, при этом имитация установки стента может осуществляться с использованием всех элементов, входящих в систему 10.
Контроллер 40 может включать пользовательский интерфейс, позволяющий пользователю выбирать различные параметры, относящиеся к имитации. Например, тип выполняемой операции (напр., открытие закупорки в определенном месте кровеносного сосуда), тип используемого инструмента (напр., проволочный проводник, баллонный катетер, катетер для доставки стента и т.д.), графическое изображение (напр., флуороскопический экран, трехмерная имитация компьютеризированной анатомической структуры и т.д.), которое может отображаться на дисплее 50, или любой другой параметр, доступный для пользователя. В конце имитируемой операции контроллер может дополнительно определить показатель качества выполнения исходя из эффективности действий пользователя и отобразить этот показатель на дисплее 50. Контроллер 40 может представлять собой или включать в себя компьютер общего назначения, такой как персональный или портативный компьютер, планшетный компьютер или любой другой тип вычислительной платформы, который может быть снабжен запоминающим устройством, центральным процессорным устройством (ЦПУ) или микропроцессорным устройством и несколькими портами ввода-вывода.
Обратимся к фиг.2A и 2B, на которых изображены изометрический вид и вид спереди съемного рабочего блока согласно некоторым вариантам настоящего изобретения. Рабочий блок 20 может включать камеру 21 для инструментов, предназначенную для вмещения операционного инструмента, такого как один из коаксиальных инструментов, входящих в инструмент 5, блок 22 силовой обратной связи, который может прикладывать, вызывать или создавать физическую силу или сопротивление, прикладываемые к операционному инструменту, блок 23 слежения, выполненный с возможностью определения данных слежения, относящихся к операционному инструменту (т.е., отслеживания поступательных и вращательных движений операционного инструмента), и датчик 24 диаметра для получения информации о диаметре, относящейся к операционному инструменту (т.е. о диаметре операционного инструмента). Рабочий блок может быть выполнен с возможностью работы с несколькими инструментами, входящими в инструмент 5 и имеющими различные диаметры (в отличие от традиционных рабочих блоков, которые ограничены конкретным диаметром). Соответственно, все рабочие инструменты системы, показанной на фиг.1, могут быть по существу идентичными и использоваться с различными операционными инструментами, имеющими разные диаметры (напр., интродьюсерами, катетерами или проволочными проводниками. Рабочий блок 20 может также включать рычаг 25 для перемещения операционного инструмента к внутренней поверхности (напр., верхней поверхности) камеры 21 для инструментов (фиг.2C). В состав рабочего блока 20 могут быть включены один или несколько стыковочных компонентов 26 для стыковки рабочего блока со стыковочной станцией на основании 30.
Камера 21 для инструментов может иметь вход 100 и выход 200 для любого коаксиального инструмента, входящего в состав инструмента 5. Вход и выход могут быть выполнены с возможностью поддержки любого диаметра инструмента. Блок 22 силовой обратной связи может крепиться к камере 21 так, чтобы силу, создаваемую блоком 22 силовой обратной связи, можно было прикладывать к части операционного инструмента, расположенного в камере 21, когда пользователь манипулирует операционным инструментом. Управление блоком 22 силовой обратной связи можно осуществлять таким образом, чтобы он прикладывал силу, имитирующую силу, которая могла бы быть приложена к любому инструменту 5 тем или иным человеческим органом (напр., кровеносным сосудом) в соответствии с процедурой имитации, выбранной пользователем при помощи пользовательского интерфейса, входящего в состав контроллера 40. Например, контроллер 40 может управлять блоком 22 силовой обратной связи, прикладывая к части катетера, расположенного внутри камеры 21 в блоке 20, силу, имитирующую силу, которая могла бы быть приложена к катетеру при задевании стенок левой коронарной артерии. Блок 22 силовой обратной связи может включать любой электродвигатель, например, звуковую катушку, серводвигатель, электромагнит, шаговый двигатель и т.д. для приложения силы в ответ на сигнал обратной связи.
Данные слежения, например, данные о поступательных и вращательных движениях любого операционного инструмента внутри камеры 21, могут определяться блоком 23 слежения. Блок 23 слежения может представлять собой оптический блок, выполненный с возможностью отслеживания поступательных и вращательных движений продольного объекта (напр., операционного инструмента). Например, оптический блок 23 слежения может содержать источник света и экран для получения изображений шаблона инструмента, когда инструментом манипулирует пользователь, и обработки изменения шаблона во времени. Оптический блок 23 слежения может использовать те же способы и компоненты, которые применяются для оптической мыши. Полученные данные о поступательных и вращательных движениях инструмента, отслеживаемых оптическим блоком 23 слежения, можно передавать контроллеру 40, позволяя ему определять величину силы, которая должна быть приложена к инструменту блоком 22 силовой обратной связи, на основе полученных величин движений. Например, если движение инструмента показывает, что в результате манипулирования инструмент вышел из коронарной артерии и вошел в более узкую артерию, величина силы, которую необходимо приложить к инструменту, может возрасти. В некоторых вариантах осуществления оптический блок 23 слежения можно заменить механическим или оптико-механическим блоком слежения, например, используя те же механизмы, которые применяются в трекбол-мыши или другой механической мыши.
Датчик 24 диаметра может быть прикреплен к камере 21 для получения информации о диаметре, относящейся к инструменту, например, чтобы определять, какой инструмент вставлен в камеру 21 для инструментов. Датчик 24 диаметра может входить в состав камеры 21 или представлять собой отдельный компонент. Датчик 24 диаметра может определять диаметр инструмента 5 внутри камеры 21 или снаружи камеры 21, например, перед входом 100 или за выходом 200. Датчик 24 диаметра может представлять собой датчик, выполненный с возможностью определения диаметра поперечного сечения объекта круглой формы, вытянутого в продольном направлении. Например, датчик 24 может представлять собой механический или оптический датчик. Оптический датчик может включать источник света и экран, который распознает тень инструмента на экране и определяет (при помощи процессора, например процессора 62, изображенного на фиг.5) диаметр инструмента на основе размера тени, расстояния от источника света до экрана и т.д. Точность такого способа определения обусловлена разрешением экрана, при этом чем выше разрешение, тем выше точность. Контроллер 40 может принять полученное значение диаметра и идентифицировать тип инструмента, затем применить предварительно введенные в память данные, касающиеся свойств инструмента, в ходе имитации, а также инициировать приложение силы блоком 22 силовой обратной связи к инструменту 5 с учетом определенного диаметра и типа инструмента.
В некоторых вариантах осуществления датчик 24 диаметра и оптический блок 23 слежения могут быть объединены в единственный датчик (напр., оптический датчик). Этот единственный датчик может быть выполнен с возможностью оптического и/или механического измерения поступательных и вращательных движений операционного инструмента, а также определения диаметра инструмента. Единственный датчик может передавать данные и/или управляться контроллером 40. В некоторых вариантах осуществления рабочий блок 20 может быть сконструирован таким образом, чтобы поступательные и вращательные движения и диаметр операционного инструмента определялись единственным датчиком. Примером единственного датчика согласно некоторым вариантам настоящего изобретения может служить лазерный датчик, работающий на основе доплеровского эффекта.
В некоторых примерах осуществления рабочий блок 20 может включать рычаг 25 для автоматического перемещения операционного инструмента по направлению к внутренней поверхности камеры 21 для инструментов. Рычаг 25 может подталкивать операционный инструмент по направлению к поверхности, например, верхней внутренней поверхности камеры 21 таким образом, чтобы, независимо от диаметра инструмента, часть внешней поверхности инструмента могла коснуться внутренней поверхности камеры 21 для инструментов (см. фиг.2C). Если часть внешней поверхности инструмента 5 касается внутренней поверхности камеры 21 для инструментов в месте, известном датчику, входящему в состав блока 23 слежения, датчик может отслеживать движения инструмента 5 независимо от диаметра инструмента. Датчик может воспринимать движение внешней поверхности, касающейся внутренней поверхности камеры 21 для инструментов. Местоположение датчика и блока 23 слежения может фиксироваться для каждого рабочего блока 20, при этом рычажный механизм позволяет использовать по существу идентичные блоки слежения для отслеживания движений инструментов, имеющих различные диаметры. Следует понимать, что рычаг 25 приведен лишь в качестве примера механизма, который позволяет по существу идентичным блокам слежения распознавать и отслеживать движение инструментов, имеющих различные диаметры, и что объем изобретения не ограничивается этим рычажным механизмом. В изобретении также может использоваться любой другой механизм, который позволяет по существу идентичным блокам слежения распознавать и отслеживать движение инструментов, имеющих различные диаметры.
Рабочий блок 20 может включать один или несколько стыковочных компонентов 26 для стыковки рабочего блока со стыковочной станцией при помощи механизма «подсоединяй и работай». В данном контексте механизм «подсоединяй и работай» относится к любому механизму стыковки или сборки, который позволяет пользователю собрать систему за счет нескольких простых действий, например, зажимания, нажатия, ввода и т.д. Механизм «подсоединяй и работай» позволяет пользователю присоединить какой-либо компонент к системе за счет, чаще всего, трех действий, двух действий или даже одного действия. Стыковочные компоненты 26 могут представлять собой такие компоненты, как штифты, зажимы, скобы, крепежные элементы и другие детали, обеспечивающие возможность легкой сборки и разборки компонента в составе системы (напр., механической системы).
В некоторых вариантах осуществления съемный рабочий блок 20 может быть собран в составе медицинской имитирующей системы, в которой возможность складывания не предусмотрена. Унифицированный характер съемного рабочего блока 20 делает его пригодным для сборки в составе любой медицинской имитирующей системы, которая требует определения поступательных и вращательных движений любого продольного операционного инструмента и приложения силы к этому инструменту. В рабочем блоке 20 можно учесть потребность в простом техническом обслуживании и легкой замене запасных частей в составе как складывающихся, так и нескладывающихся медицинских имитирующих систем. Чтобы система могла использовать рабочий блок 20, ей может потребоваться основание (складывающееся или нескладывающееся), содержащее стыковочную станцию(-и) для стыковки по меньшей мере с одним съемным рабочим блоком 20.
Обратимся к фиг.3A-3B, на которых изображен пример складывающегося основания согласно некоторым вариантам изобретения. На фиг.3A представлен изометрический вид основания, а на фиг.3B - вид основания спереди. Изображенное на фиг.3A-3B складывающееся основание может служить детализированным примером основания 30, изображенного на фиг.1. Складывающееся основание 30 может включать по меньшей мере одну стыковочную станцию 31 для подстыковки рабочего блока, например, рабочего блока 20. Основание 30 может также включать по меньшей мере две части 32 и 33, соединяемые шарнирным соединителем 38, каждая из которых содержит направляющие трубки 34 или 35, монтируемые на основаниях 30 при помощи опор 36 и 37 соответственно. Основание 30 может также включать два или несколько переходников 39 (напр., переходников 39A, 39B и 39C) для согласования инструментов различного типа, имеющих разные диаметры, с по существу идентичными съемными рабочими блоками 20. В некоторых вариантах осуществления основание 30 может включать только одну часть 32 и может быть не складывающимся. Все различные компоненты (стыковочные станции 31, направляющие трубки 34 и 35, опоры 36 и 37 и переходники 39A-39C) могут устанавливаться на основании, состоящем только из одной части.
Пример стыковочной станции 31 может включать один или несколько элементов 311 крепления и раму 312 для подстыковки рабочего блока 20. Элементы 311 крепления могут представлять собой любой элемент, выполненный с возможностью фиксации, зажимания, сочленения, присоединения и т.д. какого-либо компонента, такого как рабочий блок 20, в системе (напр., механической системе) такой как основание 30. Элементы 311 крепления могут обеспечить легкую сборку и разборку рабочего блока 20 при помощи механизма «подсоединяй и работай». Элементы 311 крепления могут включать штифты, зажимы, скобки, крепежные изделия и другие детали. Рама 312 может поддерживать рабочий блок 20 при стыковке со стыковочной станцией 31. Зажимной механизм рабочего блока 20 для крепления в стыковочной станции 31 может быть вертикальным (как показано на фиг.4), горизонтальным, расположенным с любой стороны основания 30 или имеющим любое другое расположение, которое обеспечивает легкую установку или демонтаж рабочего блока 20 в стыковочной станции 31. Элемент(ы) 311 крепления могут включать любой элемент, обеспечивающий стыковку рабочего блока 20 со стыковочной станцией 31 в вертикальном или горизонтальном положении, или с любой стороны основания 30.
В некоторых вариантах осуществления, чтобы блок 22 силовой обратной связи прикладывал силу к инструменту, вставленному в блок 20, состыкованный со станциями 31, переходник 39 может размещаться в стыковочной станции 31 напротив блока 22 силовой обратной связи. Переходник 39 может иметь форму скоса, поддерживая инструмент 5 таким образом, чтобы в ответ на силу, прикладываемую к инструменту блоком 22 силовой обратной связи, нормальная (противодействующая) сила была приложена к инструменту переходником 39. Стыковочные станции 31 могут отличаться друг от друга размером переходников. Для согласования различных операционных инструментов в разных стыковочных станциях 31 могут устанавливаться различные переходники, например, переходник 39A может быть относительно коротким, чтобы обеспечить ввод интродьюсера, имеющего диаметр около 4 мм, переходник 39B может иметь среднюю высоту, чтобы обеспечить ввод катетера, имеющего диаметр около 1 мм, а переходник 39C может иметь наибольшую высоту, чтобы обеспечить ввод проволочного проводника, имеющего диаметр около 0,14 мм. Разные высоты различных переходников могут быть связаны с разными радиусами различных операционных инструментов.
В некоторых вариантах осуществления один или несколько блоков 22 силовой обратной связи и/или блоков 23 слежения могут быть собраны непосредственно на складывающемся основании 30 или при помощи механизма «подсоединяй и работай», или в качестве постоянного компонента (напр., компонента, который не выполнен с возможностью периодической разборки). Складывающаяся медицинская имитирующая система может включать два или несколько блоков силовой обратной связи, например, два или несколько блоков 22 силовой обратной связи, каждый из которых можно установить на основании 30, например, в положениях A, B или C. Два или несколько блоков 22 силовой обратной связи могут быть идентичными или различаться, так что каждый из них предназначен для приложения силы к отличающемуся операционному инструменту (напр., интродьюсеру, катетеру или проволочному проводнику) или для другого диапазона диаметров инструментов. Медицинская имитирующая система может также включать два или несколько блоков слежения, например, блоков 23 слежения, установленных на основании 30 в положениях A, B и C. Два или несколько блоков 23 слежения могут быть идентичными или различаться, так что каждый из блоков слежения может быть предназначен для определения поступательных и вращательных движений отличающегося операционного инструмента или другого диапазона диаметров инструментов. В некоторых вариантах осуществления каждая из двух частей 32 и 33 складывающегося основания может содержать по меньшей мере один блок силовой обратной связи.
В некоторых вариантах осуществления медицинская имитирующая система 10 может содержать два или несколько блоков 22 силовой обратной связи, постоянно установленных на основании 30 (напр., по меньшей мере один на каждой из частей 32 и 33, когда основание является складывающимся). Блоки 22 силовой обратной связи могут быть установлены в положениях A, B и/или C и быть при этом одинаковыми или различными. В этих системах блоки 23 слежения могут быть съемными (например, устанавливаемыми при помощи механизма «подсоединяй и работай») и по существу идентичными, при этом каждый из блоков 23 слежения может быть установлен в любом из местоположений A, B или C. Аналогично, некоторые медицинские имитирующие системы могут включать два или несколько по существу идентичных съемных датчиков 24 диаметра, выполненных с возможностью установки в любом из местоположений A, B или C. В некоторых вариантах осуществления система 10 может включать два или несколько блоков 23 слежения, постоянно установленных на основании 30, при этом блоки 22 силовой обратной связи могут быть съемными и устанавливаемыми в положениях A, B и/или C при помощи механизма «подсоединяй и работай».
В некоторых вариантах осуществления блоки слежения (напр., блоки 23 слежения), установленные на складывающемся основании, могут быть самокалибрующимися, при этом каждый блок может выполнять программу самокалибровки в ответ на раскладывание системы. Самокалибрующиеся блоки слежения могут входить в состав съемного рабочего блока, например, съемного рабочего блока 20, или могут непосредственно устанавливаться на основании 30. Самокалибровка может включать, например, определение для каждого оптического блока слежения одного или нескольких параметров калибровки в процессе изготовления оптического блока слежения и/или в процессе изготовления рабочего блока, содержащего блоки слежения, и использовать эти параметры в ходе отслеживания. Параметр(ы) калибровки могут храниться в памяти, связанной с блоком слежения или в памяти, связанной со складывающейся медицинской имитирующей системой, или в контроллере 40.
В некоторых примерах изобретения параметры калибровки могут быть получены при помощи специального калибровочного устройства и способа. Калибровочное устройство, управление которым может осуществлять процессор, может включать канал инструмента, механизированный инструмент с известным радиусом (напр., катетер), двигатель, управляемый контроллером, который обменивается данными с процессором. Калибровочное устройство может манипулировать инструментом по перемещению и скорости (движение назад, вперед и вращение), имеющим известные значения. Процессор может принимать известные значения от контроллера двигателя, а затем сравнивать эти известные значения со значениями, полученными от блоков 23 слежения и/или датчика 24 диаметра. Процессор может вычислить набор калибровочных параметров на основе указанного сравнения (используя, например, интерполирующий полином). Этот процесс может осуществляться при изготовлении каждого рабочего блока, поскольку каждому диаметру инструмента соответствует массив калибровочных параметров, содержащий множество наборов параметров (для каждого диаметра инструмента), подлежащих сохранению в памяти, связанной с данным рабочим блоком, например, в памяти 64 (см. фиг.5). Параметр калибровки может включать параметры, предназначенные для калибровки блоков 23 слежения или датчика 24 диаметра, либо обоих этих устройств.
Запуск программы калибровки может инициироваться раскладыванием системы, включением питания системы, а также при установке оптического блока слежения или съемного рабочего блока, когда блок еще не установлен в складывающейся системе, или в любой момент во время работы медицинской имитирующей системы. Программа калибровки может выполнять калибровку оптических блоков слежения относительно нескладывающегося основания. Программа калибровки может выполняться, например, контроллером, позволяющим оптическому блоку слежения производить по существу точные измерения поступательных и вращательных движений (т.е., данные слежения) любого операционного инструмента, отслеживаемого оптическими блоками слежения. В некоторых вариантах осуществления в медицинской имитирующей системе 10 могут устанавливаться механические или оптико-механические блоки слежения, при этом программа калибровки может выполняться механическими или оптико-механическими блоками слежения.
Пример программы калибровки может включать определение диаметра инструмента при помощи датчика 24 диаметра и выбора набора параметров калибровки из множества наборов параметров калибровки, сохраняемых в памяти 64, на основе определенного диаметра. Программа может также включать применение выбранного набора параметров к значениям, измеряемым блоком 23 слежения. Процессор 62, входящий в состав рабочего блока 20 (см. фиг.5) может корректировать измеренные значения, используя параметры калибровки, и посылать скорректированные значения контроллеру 40 для использования в имитационной модели. В некоторых вариантах осуществления параметры калибровки и измеренные значения может принимать контроллер 40, при этом контроллер 40 может выполнять программу калибровки.
Каждая из частей 32 и 33 складывающегося основания может включать направляющую трубку, например, направляющую трубку 34, расположенную на части 32. Направляющие трубки 34 и 35 могут направлять операционный инструмент вдоль частей 32 и 33. В некоторых вариантах осуществления направляющая трубка 34 может иметь больший диаметр, чем направляющая трубка 35. Каждая направляющая трубка может поддерживаться по меньшей мере одной опорой (36, 37) на одном конце и стыковочной станцией 31A или 31B на другом конце, как показано на фиг.3A и 3B. Каждая стыковочная станция может иметь окошко или отверстие, позволяющее вводить в станцию только инструменты заданного диапазона. Станция в положении A может иметь отверстие, приспособленное для ввода в станцию интродьюсера (или инструмента такого же диаметра), станция в положении B может иметь отверстие, выполненное с возможностью ввода в станцию только катетера (или инструмента такого же диаметра), а станция в положении C может иметь отверстие, выполненное с возможностью ввода в станцию только проволочного проводника.
Соединитель 38 может содержать ось или шарнир, позволяющие частям 32 и 33 складываться, что дает возможность приводить основание 30 в сложенное положение, как показано на фиг.3C. В некоторых вариантах осуществления полная длина основания 30 в сложенном положении может не превышать 55 см, что позволяет упаковать основание в небольшой чемодан. В некоторых вариантах осуществления части 32 и 33 можно рассоединять таким образом, чтобы каждую часть можно было упаковать по отдельности, а соединитель 38 может включать механизм для соединения и разъединения частей 32 и 33.
В некоторых вариантах осуществления система может включать две отдельные пары складывающихся оснований 30, например, как показано на фиг.1. В некоторых вариантах осуществления два складывающихся основания 30 соединены механически. Однако специалисту следует понимать, что два основания необязательно должны быть соединены механически. Применение системы с двойным основанием согласно настоящему описанию может быть предназначено для имитации эндоваскулярной процедуры, в которой используются одновременно два катетера, или инструменты вводятся в тело пациента более чем через одно место введения, когда закупорка кровеносной системы возникает в месте пересечения двух кровеносных сосудов.
В некоторых вариантах изобретения складывающееся основание может иметь Y-образную форму (не показана). Y-образные основания могут включать три части, например, одну ножку и два рычага, присоединенные к ножке, например, Y-образным соединителем. Эти три части можно собирать, например, параллельно друг другу. Y-образный переходник может быть присоединен к ножке на одном ее конце и к двум рычагам на двух других концах. Y-образное основание может быть складывающимся или содержать единственный элемент основания, имеющий Y-образную форму.
Пример Y-образной медицинской имитирующей системы может включать 4 стыковочные станции (напр., стыковочных станций 31), две из которых расположены на ножке основания, а две другие - на конце каждого из рычагов. В эти четыре стыковочные станции могут быть установлены четыре рабочих блока (напр., блоки 20). В первый рабочий блок, расположенный на ножке, могут быть вставлены два интродьюсера, каждый из которых содержит катетер и проволочный проводник. В альтернативном случае один интродьюсер, содержащий два катетера, каждый из которых содержит проволочный проводник, может быть вставлен в первый рабочий блок. Два катетера могут быть вставлены во вторую стыковочную станцию на указанной ножке. После выхода из второго рабочего блока два катетера можно разделять на две ветви путем введения проволочных проводников или катетеров в каждый из указанных рычагов. Согласно некоторым вариантам изобретения, проволочный проводник, помещенный в каждый катетер, может вводить дополнительные рабочие блоки на конце каждого рычага.
В некоторых вариантах осуществления Y-образная медицинская имитирующая система может не иметь съемные рабочие блоки, при этом по меньшей мере некоторые компоненты, входящие в состав рабочих блоков, могут быть собраны непосредственно на Y-образном основании тем же способом, который описан выше применительно к основанию 30. Аналогичным образом, механизм управления (напр., контроллер 40) и измерительные компоненты (напр., датчик 24 диаметра и блок 23 слежения) могут быть идентичными раскрытым выше, а каждая характеристика, способ, компонент, элемент, часть и т.д., раскрытые в связи с прямолинейной медицинской имитирующей системой (напр., система 10, блок 20 и основание 30, изображенные на фиг.1-4), могут быть реализованы также в отношении Y-образной медицинской имитирующей системы.
На фиг.4 проиллюстрирована установка рабочих блоков на основании согласно некоторым вариантам настоящего изобретения. Три рабочих блока 20 показаны в положении стыковки со стыковочными станциями 31 перед окончательной стыковкой. Блоки 20 могут быть состыкованы или установлены на складывающемся основании 30 при помощи механизма «подсоединяй и работай». Блоки могут стыковаться со станциями 31 путем присоединения блока 20 к элементу 311 крепления и нажатия на элемент 311 крепления для его приведения в положение стыковки. После того, как блок 20 состыкован со стыковочной станцией 31, все компоненты, входящие в состав съемного блока 20, оказываются в нужном положении.
На фиг.5 изображена высокоуровневая структурная схема системы для имитации медицинской процедуры с визуализационным контролем согласно некоторым вариантам настоящего изобретения. Система 10 может содержать: контроллер 40 и узлы 60 для каждой из трех рабочих станций (напр., 60A, 60B и 60C), обменивающихся данными с контроллером 40 при помощи коммуникационного интерфейса 70. Контроллер 40 может включать процессор 42, выполненный с возможностью исполнения команд, хранящихся в памяти 43, и обмена данными с пользователем при помощи пользовательского интерфейса 45. В памяти 43 может храниться программа для выполнения медицинской процедуры с визуализационным контролем. Процессор 42 может выполнять шаги, раскрытые в способе 700. Контроллер 40 может представлять собой компьютер общего назначения, такой как персональный или портативный компьютер, планшетный компьютер или любой другой тип вычислительной платформы. Процессор 42 может быть снабжен ЦПУ или микропроцессорным устройством и несколькими портами ввода-вывода. Память 43 может включать носитель информации, на котором могут храниться команды выполнения операций и/или способов, например, различных имитирующих программ для операционных процедур, моделируемых системой 10. Пользовательский интерфейс 45 может включать любое устройство, обеспечивающее для пользователя (напр., врача или преподавателя) возможность обмена данными (входными и выходными) с контроллером 40, например, пользовательский интерфейс 45 может включать: клавиатуру, мышь, громкоговоритель(-и), микрофон и дисплей 50. Дисплей 50 может представлять собой: экран, сенсорный экран, трехмерные (3D) очки, графический интерфейс пользователя (ГИП) или любой другой дисплей.
В памяти 43 могут храниться команды для имитации медицинской процедуры с визуализационным контролем. Команды могут включать получение трехмерного (3D) медицинского изображения органа пациента, формирование компьютеризированной анатомической 3D-модели органа в соответствии с 3D-медицинским изображением и имитацию процедуры с визуализационным контролем для пациента в соответствии с 3D-моделью. Команда, относящаяся к имитации процедуры с визуализационным контролем, может также включать прием входных данных от датчиков, например, прием данных слежения, относящихся к движениям различных операционных инструментов, от блоков 22 слежения и/или прием данных, относящихся к типу операционного инструмента, от датчиков 24 диаметра. Процессор 42 может использовать принятую информацию для имитации продвижения и местоположения моделируемого операционного инструмента (и типа инструмента) внутри компьютеризированной анатомической структуры. Процессор может также отображать для пользователя имитирующее изображение моделируемого операционного инструмента внутри компьютеризированной анатомической структуры, например, после получения входных данных о том, что пользователь применяет шприц с контрастной жидкостью и ножную педаль. Команды могут также включать периодическое обновление местоположения каждого операционного инструмента и идентичности каждого инструмента в имитационной модели на основе информации, принятой от датчиков, и дальнейшее представление для пользователя имитирующего изображения нового местоположения по запросу (напр., нажатию ножной педали).
Контроллер 40 может принимать от пользователя при помощи пользовательского интерфейса 45 команды, исполняемые процессором 42; так, пользователь может выбрать тип операционной процедуры (напр., баллонную ангиопластику) и место закупорки в артериальной сети, при этом процессор может определить величину силы, которую блоки силовой обратной связи могут прикладывать к операционным инструментам согласно выбору пользователя. Контроллер может воспроизводить для пользователя на дисплее 50 имитирующее изображение (напр., имитирующее рентгеновское изображение) местоположения операционного (-ых) инструмента (-ов) внутри артериальной сети.
Узел 60 на каждом рабочем блоке может содержать процессор 62 и память 64, поддерживающие связь со следующими устройствами: блоком 22 силовой обратной связи, оптическим блоком 23 слежения и датчиком 24 диаметра. Все узлы 60 могут быть по существу идентичными. В некоторых вариантах осуществления единственный процессор 62 и/или единственная память 64 могут осуществлять связь с двумя или несколькими: блоками 22 силовой обратной связи, оптическими блоками 23 слежения и/или датчиками 24 диаметра, входящими в состав, например, двух или нескольких рабочих блоков. Единственный процессор и/или единственная память могут быть установлены на основании, входящем в систему для имитации медицинской процедуры с визуализационным контролем, например, на основании 30. Процессор 62 может представлять собой любую вычислительную платформу, выполненную с возможностью установки в рабочем блоке или на основании. Память 64 может представлять собой носитель информации, на котором могут храниться команды, выполняемые процессором 62, и который также может быть выполнен с возможностью установки в рабочем блоке 20 и/или на основании 30. Процессор 62 может посылать команду блоку 22 силовой обратной связи на приложение силы, определяемой контроллером 40. Процессор 62 может также принимать данные слежения от блока 23 слежения и информацию о диаметре от датчика 24 диаметра. Каждый из процессоров 62, размещаемых в различных положениях A, B или C в системе 10, в рабочем блоке 20 или на основании 30, может принимать от соответствующего датчика 24 диаметра измеренный диаметр инструмента, вставляемого в рабочий блок в соответствующем положении. В альтернативном случае процессор 62 может принимать информацию о диаметре от единственного датчика (напр., оптического датчика), выполненного с возможностью определения как диаметра, так и движений операционного инструмента.
Каждый из процессоров 62 может передавать принятую информацию о диаметре и данные слежения контроллеру 40 (процессору 42) для использования любым программным обеспечением имитационного моделирования, хранящимся в памяти 43. Контроллер 40 может отображать на дисплее 50 имитирующее изображение компьютеризированной анатомической структуры, которое содержит моделируемый операционный инструмент. Тип моделируемого инструмента можно определить с помощью пользовательского интерфейса 45 или на основе информации о диаметре, принятой датчиком 24 при помощи процессора 62, а местоположение инструмента в компьютеризированной анатомической структуре можно определить на основе данных слежения, принятых от блока 23 слежения при помощи процессора 62.
Контроллер 40 может определять силу, которая должна быть приложена каждым из блоков 22 силовой обратной связи, также в соответствии с входными данными, принятыми от каждого из процессоров 62 (или от единственного процессора 62). Например, контроллер 40 может получить от процессора 62 информацию о том, что диаметр инструмента в положении A равен 4 мм. На основе полученного диаметра контроллер 40 может определить, что в положении A был вставлен интродьюсер. Контроллер может также получить данные о поступательных и вращательных движениях интродьюсера, свидетельствующие о том, что инструмент был введен в кровеносный сосуд еще на 5 см, и вычислить новое местоположение интродьюсера в артериальной сети. Контроллер может также определить силу, которая приложена блоком 22 силовой обратной связи в положении A к интродьюсеру, исходя из: нового местоположения интродьюсера в артериальной сети; имитирующей процедуры, выбранной пользователем; и манипуляций операционным инструментом, совершаемых пользователем во время имитации, которые были определены оптическим блоком 23 слежения (или единственным датчиком) в положении A.
Процессоры 62 могут осуществлять связь с контроллером 40 (процессором 42) через коммуникационный интерфейс 70. Коммуникационный интерфейс 70 может осуществлять связь с контроллером 40 с помощью проводной или беспроводной связи. Коммуникационный интерфейс 70 может включать любой порт для проводной связи, например, порт USB, порт LAN RJ или последовательный порт; или компоненты беспроводной связи, например, антенну WiFi. Коммуникационный интерфейс 70 может быть установлен на основании 30 так, чтобы связь между процессором (-ами) 62 и интерфейсом 70 могла быть установлена, когда каждый рабочий блок 20 стыкуется со стыковочной станцией 31. Рабочий блок 20 и стыковочная станция 31 могут включать компоненты для подключения, выполненные с возможностью установления связи между рабочими станциями и интерфейсом 70.
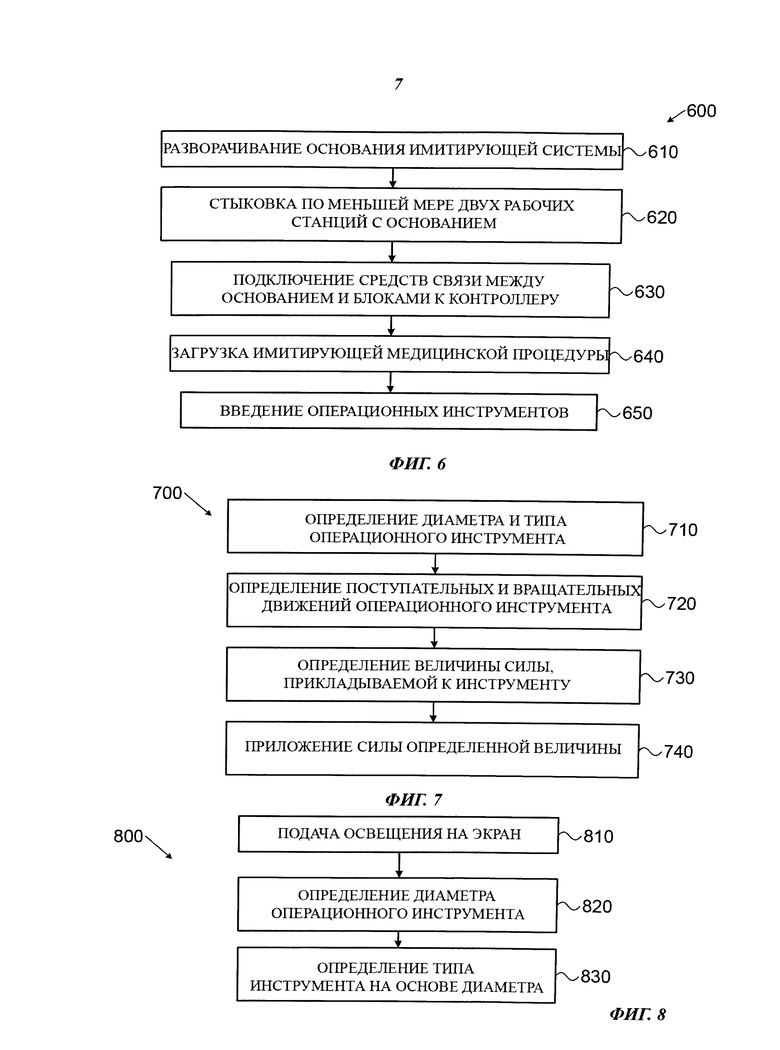
Обратимся к фиг.6, которая иллюстрирует способ сборки системы для имитации медицинской процедуры с визуализационным контролем согласно некоторым вариантам настоящего изобретения. Систему, например, систему 10, можно упаковать внутрь небольшого чемодана или коробки так, чтобы основные компоненты системы были упакованы по отдельности. Основание системы (напр., складывающееся основание 30, Y-образное основание или двойное основание) можно упаковать в сложенном положении (см. фиг.3C) так, чтобы две части основания (напр., части 32 и 33) были обращены обратными сторонами друг к другу или помещались отдельно друг от друга. Операция 610 данного способа может включать разворачивание (или сборку) основания системы имитации в рабочее положение. Альтернативно, основание может представлять собой единственную деталь, поэтому для приведения в рабочее положение его можно просто достать из упаковки. Операция 620 способа может включать стыковку по меньшей мере двух рабочих блоков (напр., рабочих блоков 20) со стыковочной станцией при помощи механизма «подсоединяй и работай». Все рабочие блоки могут быть по существу идентичными и могут включать по существу идентичные компоненты так, чтобы любой рабочий блок можно было установить в любом из положений A, B или C.
После сборки всех механических компонентов (напр., оснований и рабочих блоков) операция 630 данного способа может содержать подключение собранной механической системы к контроллеру при помощи коммуникационного интерфейса 70. Операция 640 данного способа может включать загрузку пользователем имитирующей программы, сохраненной в связанной с контроллером 40 памяти, напр., в памяти 43. Пользователь может также выбрать операционную процедуру из группы операционных процедур, сохраняемых в памяти, для имитационного моделирования медицинской имитирующей системой.
Операция 650 данного способа включает введение пользователем операционного (-ых) инструмента (-ов) (напр., инструмента 5) в переносную складывающуюся медицинскую имитирующую систему. После введения инструмента (-ов) начинается имитируемая медицинская процедура с визуализационным контролем. Например, когда три операционных инструмента, вставленных один в другой, введены в первую рабочую станцию (блок) 20, состыкованную со стыковочной станцией 31, находящейся в положении A (как показано на фиг.1 и 3A-3B), блок слежения и датчик диаметра в положении A могут начать посылать сигналы контроллеру 40 (при помощи процессора 62 и интерфейса 70). При этом контроллер 40 может отображать для пользователя имитирующее изображение операционного инструмента и органа (компьютеризированной анатомической структуры), в который введен инструмент, в соответствии с имитируемой процедурой, выбранной пользователем при выполнении операции 640. Контроллер 40 может управлять блоком силовой обратной связи, входящей в состав рабочего блока, состыкованного в положении A, с целью приложения силы к инструменту. Такая же методика может использоваться, когда другие операционные инструменты вводятся в положения B и C.
Контроллер 40 может реализовывать различные способы управления имитируемой медицинской процедурой с визуализационным контролем, например, способ, изображенный на фиг.7. Команды реализации способа 700 могут храниться в памяти 43 для исполнения процессором 42. Эти команды могут храниться в любой другой памяти и/или исполняться любым другим процессором. Контроллер 40 может быть выполнен с возможностью приема информации и управления всеми управляемыми компонентами, входящими в систему, например, компонентами, входящими в каждый рабочий блок (напр., блок 20), установленный на основании (напр., основании 30, Y-образном основании или двойном основании). Операция 710 данного способа может включать определение информации о диаметре, относящейся к операционному инструменту, введенному в рабочий блок, например, путем определения типа операционного инструмента (напр., интродьюсера, катетера или проволочного проводника), введенного в каждый рабочий блок, на основе информации, полученной от датчиков (напр., датчиков 24 или единственного датчика, выполненного с возможностью определения как диаметра, так и движений операционного инструмента).
Операция 720 данного способа может включать получение данных слежения, относящихся к операционному инструменту, например, путем определения поступательных и вращательных движений операционного инструмента внутри рабочего блока. Контроллер может также принимать данные слежения, относящиеся к поступательным и вращательным движениям каждого из операционных инструментов, введенных в каждый рабочий блок, от оптических блоков слежения (или единственного датчика, выполненного с возможностью определения как диаметра, так и движений операционного инструмента) на каждом рабочем блоке. Операция 730 данного способа может включать определение для каждого рабочего блока величины силы, которая должна быть приложена к инструменту блоком силовой обратной связи, на основе полученной информации о диаметре и измеренных поступательных и вращательных движений (т.е. данных слежения). Контроллер может определять величину силы на основе информации, относящейся к типу медицинской процедуры, выбранной пользователем, местоположению операционных инструментов в компьютеризированной анатомической структуре в соответствии с выбранной медицинской процедурой, отслеживаемыми движениями инструмента и в соответствии с типом инструмента. Определенная сила, которую может прикладывать конкретный блок силовой обратной связи, имитирует силу, которую была бы приложена со стороны человеческой ткани, в соответствии с имитационной моделью, к конкретному инструменту, например, сила, которая была бы приложена к катетеру со стороны коронарной артерии. Операция 740 данного способа может включать управление блоком силовой обратной связи с целью приложения силы определенной величины.
В некоторых вариантах осуществления способ 700 может также включать отображение имитирующего изображения операционного инструмента в компьютеризированной анатомической структуре во время имитации медицинской процедуры с визуализационным контролем на основе информации о диаметре и данных слежения. Имитирующее изображение может содержать компьютеризированную анатомическую структуру, например, имитацию артериальной сети и моделируемого операционного инструмента. Тип моделируемого инструмента может определяться на основе информации о диаметре, принятой при выполнении операции 710 или при помощи пользовательского интерфейса 45, а местоположение инструмента в компьютеризированной анатомической структуре может быть определено на основе данных слежения, принятых при выполнении операции 720.
Обратимся к фиг.8, которая иллюстрирует способ определения диаметра и типа операционного инструмента согласно некоторым вариантам настоящего изобретения. Операция 810 данного способа может включать введение операционного инструмента 5 (напр., интродьюсера, катетера или проволочного проводника) в датчик диаметра, входящий в состав рабочего блока. Свет может поступать от источника света. Источник света может иметь по существу параллельный луч (напр., лазерный луч) известного диаметра или луч с известным углом раскрытия. Источник света может располагаться на известном расстоянии от светочувствительного экрана. Операционный инструмент, проходящий в световой луч (по существу перпендикулярно световому лучу), может создавать тень на экране. Операция 820 данного способа может включать определение ширины тени и определение диаметра инструмента путем определения длины тени. Например, для параллельного луча (или по существу параллельного луча) длина тени может быть по существу идентична диаметру инструмента или пропорциональна диаметру операционного инструмента. Операция 830 данного способа может включать определение типа инструмента, введенного в рабочую станцию, исходя из определенного диаметра.
Хотя в данном описании были проиллюстрированы и описаны определенные признаки настоящего изобретения, специалисты в данной области могут предложить много модификаций, изменений, вариантов замены или эквивалентов. В связи с этим следует понимать, что прилагаемая формула изобретения распространяется и на указанные модификации и изменения, отвечающие технической сущности настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ЭЛЕКТРОМАГНИТНОГО СЛЕЖЕНИЯ В МЕДИЦИНСКОЙ ПРОЦЕДУРЕ | 2009 |
|
RU2519300C2 |
| ГОЛОГРАФИЧЕСКИЕ ПОЛЬЗОВАТЕЛЬСКИЕ ИНТЕРФЕЙСЫ ДЛЯ МЕДИЦИНСКИХ ПРОЦЕДУР | 2012 |
|
RU2608322C2 |
| СИСТЕМА И СПОСОБ КАРТОГРАФИРОВАНИЯ ДЛЯ МЕДИЦИНСКИХ ПРОЦЕДУР | 2011 |
|
RU2577760C2 |
| ЧУВСТВИТЕЛЬНЫЙ К ФОРМЕ УЛЬТРАЗВУКОВОЙ ЗОНД | 2014 |
|
RU2699331C2 |
| СИСТЕМА ОБУЧЕНИЯ И ОЦЕНКИ ВЫПОЛНЕНИЯ МЕДИЦИНСКИМ ПЕРСОНАЛОМ ИНЪЕКЦИОННЫХ И ХИРУРГИЧЕСКИХ МИНИМАЛЬНО-ИНВАЗИВНЫХ ПРОЦЕДУР | 2019 |
|
RU2687564C1 |
| ПЕРИФЕРИЙНОЕ КОНТРОЛЬНОЕ УСТРОЙСТВО ДЛЯ ИМИТАЦИИ ЭНДОСКОПИЧЕСКИХ ПРОЦЕДУР | 2018 |
|
RU2768474C2 |
| МЕДИЦИНСКАЯ СИСТЕМА | 2014 |
|
RU2676459C2 |
| Роботизированная хирургическая система транскатетерного протезирования клапана аорты | 2022 |
|
RU2789707C1 |
| МЕДИЦИНСКИЕ СИСТЕМЫ ВЗВЕШИВАНИЯ | 2017 |
|
RU2740082C2 |
| СПОСОБ И СИСТЕМА ДЛЯ МЕДИЦИНСКОГО МОДЕЛИРОВАНИЯ В ОПЕРАЦИОННОЙ КОМНАТЕ В СРЕДЕ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ ИЛИ ДОПОЛНЕННОЙ РЕАЛЬНОСТИ | 2017 |
|
RU2769419C2 |






Группа изобретений относится к медицинской технике, а именно к средствам для имитации сосудистой процедуры с визуализационным контролем. Система содержит складывающееся основание из двух частей, соединенных шарнирным соединением, где каждая часть включает одну или несколько стыковочных станций, две направляющие трубки для операционных инструментов, при этом каждая поддерживается одной из стыковочных станций, и два рабочих блока, выполненных с возможностью соединения с одной из стыковочных станций, содержит камеру для приема в себя операционного инструмента, датчик диаметра инструмента и блок слежения за инструментом. Данные слежения и информация о диаметре предоставляются программе, хранящейся в памяти. Способ содержит этапы, на которых определяют информацию о диаметре инструмента, введенном в рабочий блок, определяют данные слежения за инструментом, причем при касании инструмента поверхности камеры данных слежения определяются независимо от определения информации о диаметре, и отображают имитирующее изображение инструмента на основе информации о диаметре и данных слежения. Рабочий блок содержит камеру для инструментов, датчик диаметра инструмента, введенного в камеру, блок слежения за инструментом, где блок слежения и датчик диаметра предоставляют информацию для ее использования программным обеспечением, и рабочий блок соединен со стыковочной станцией, поддерживающей направляющую трубку для инструментов. Использование изобретений позволяет упростить транспортировку, сборку и калибровку средств для имитации сосудистой процедуры с визуализационным контролем. 3 н. и 17 з.п. ф-лы, 8 ил.
1. Система имитации сосудистой процедуры с визуализационным контролем, содержащая:
складывающееся основание, имеющее две части, соединенные шарнирным соединителем, при этом каждая часть включает одну или несколько стыковочных станций;
по меньшей мере две направляющие трубки для направления операционных инструментов, причем каждая из указанных по меньшей мере двух направляющих трубок поддерживается одной из указанных стыковочных станций; и
по меньшей мере два рабочих блока, каждый из которых выполнен с возможностью соединения с одной из указанных стыковочных станций и содержит камеру, выполненную с возможностью приема в себя операционного инструмента, датчик диаметра для получения информации о диаметре, относящейся к этому операционному инструменту, и блок слежения, выполненный с возможностью получения данных слежения, относящихся к операционному инструменту,
причем указанные данные слежения и информация о диаметре предоставляются программе, хранящейся в памяти.
2. Система по п. 1, также содержащая:
контроллер для выполнения указанной программы;
дисплей для отображения имитирующего изображения операционного инструмента в компьютеризированной анатомической структуре.
3. Система по п. 1, в которой указанные датчик диаметра и блок слежения по существу идентичны для различных операционных инструментов, имеющих разные диаметры.
4. Система по п. 1, в которой блок слежения представляет собой оптический блок слежения, а датчик диаметра входит в состав этого оптического блока слежения.
5. Система по п. 1, в которой каждый из рабочих блоков содержит блок силовой обратной связи для приложения силы к операционному инструменту.
6. Система по п. 1, в которой указанное складывающееся основание содержит третью часть и имеет Y-образную форму.
7. Система по п. 1, в которой каждая из двух указанных частей, входящих в состав основания, содержит направляющую трубку, выполненную с возможностью приема в себя операционного инструмента.
8. Система по п. 1, в которой датчик диаметра расположен внутри указанной камеры.
9. Система по п. 1, в которой каждая из указанных стыковочных станций содержит переходник для адаптации операционного инструмента внутри рабочего блока, причем каждый переходник имеет отличающийся размер для согласования с соответствующим операционным инструментом.
10. Система по п. 2, в которой контроллер определяет тип операционного инструмента, введенного в каждый рабочий блок, на основе информации о его диаметре.
11. Система по п. 1, в которой стыковочные станции выполнены с возможностью пристыковки каждого из указанных по меньшей мере двух съемных рабочих блоков за счет не более чем двух действий.
12. Способ управления системой имитации сосудистой процедуры с визуализационным контролем, включающий:
определение информации о диаметре, относящейся к операционному инструменту, введенному в рабочий блок;
определение данных слежения, относящихся к операционному инструменту, причем при касании частью внешней поверхности операционного инструмента внутренней поверхности камеры для инструментов определение данных слежения выполняется независимо от определения информации о диаметре; и
отображение имитирующего изображения операционного инструмента в компьютеризированной анатомической структуре во время имитации сосудистой процедуры с визуализационным контролем на основе указанной информации о диаметре и данных слежения.
13. Способ по п. 12, включающий также:
определение величины силы, которая должна быть приложена к инструменту блоком силовой обратной связи, на основе информации о диаметре и данных слежения;
управление блоком силовой обратной связи для приложения силы указанной определенной величины.
14. Рабочий блок системы имитации сосудистой процедуры с визуализационным контролем, содержащий:
камеру для инструментов, предназначенную для вмещения по меньшей мере одного операционного инструмента;
датчик диаметра для получения информации о диаметре, относящейся к указанному по меньшей мере одному операционному инструменту, введенному в камеру для инструментов;
блок слежения, выполненный с возможностью определения данных слежения, относящихся к указанному по меньшей мере одному операционному инструменту,
причем блок слежения выполнен с возможностью предоставления данных слежения, а датчик диаметра выполнен с возможностью предоставления информации о диаметре для их использования программным обеспечением для имитации сосудистой процедуры с визуализационным контролем на основе компьютеризированной анатомической структуры; и
причем рабочий блок соединен со стыковочной станцией, поддерживающей направляющую трубку для направления операционных инструментов.
15. Рабочий блок по п. 14, содержащий также блок силовой обратной связи.
16. Рабочий блок по п. 14, в котором указанные датчик диаметра и оптический блок слежения по существу идентичны для различных операционных инструментов, имеющих разные диаметры.
17. Рабочий блок по п. 14, в котором указанный блок слежения представляет собой оптический блок слежения, а указанный датчик диаметра входит в состав этого оптического блока слежения.
18. Рабочий блок по п. 14, в котором указанный по меньшей мере один операционный инструмент представляет собой проволочный проводник, катетер или интродьюсер.
19. Рабочий блок по п. 14, содержащий также рычаг для перемещения указанного по меньшей мере одного операционного инструмента к внутренней поверхности камеры для инструментов.
20. Рабочий блок по п. 14, содержащий также по меньшей мере один стыковочный компонент для стыковки этого рабочего блока со стыковочной станцией за счет одного действия.
| US 2008126041 A1, 29.05.2008 | |||
| US 2006194180 A1, 31.08.2006 | |||
| US 2010021875 A1, 28.01.2010 | |||
| US 2010041005 A1, 18.02.2010 | |||
| Устройство для самовозбуждения синхронных машин | 1957 |
|
SU114208A1 |

