Предложение относится к способам работы акустоэлектронных приборов, предназначенным для преобразования угловой скорости вращения объектов в электрический сигнал. Может быть использовано в системах навигации, ориентации и управления подвижными объектами.
Известные волоконно-оптические гироскопы и лазерные гироскопы широко используются в инерциальной навигации и в системах наведения. Преимуществом таких гироскопов является достаточно высокая точность, а их недостатками являются достаточно высокая стоимость и относительно большие габаритные размеры. Потребности в применении менее дорогих и меньшего размера гироскопов появились при создании и модернизации систем автомобильной безопасности, потребительских товаров (видеокамер, GPS, спортивного оборудования), промышленных товаров (роботов, управления оборудованием), медицинских изделий (хирургических инструментов) [2] - (Сарапулов С.Л., Скрипновский Г.Н., Рим Д.В. Инерциальные эффекты в поверхностных и объемных упругих волнах и возможности их использования в твердотельных микрогироскопах // XII Санкт-Петербургская международная конференция по интегрированным навигационным системам. 23-25 мая 2005: Тез. докл. с.275-283).
В тоже время известны микромеханические гироскопы и способы их работы на основе кремния [2] - (Сарапулов С.Л., Скрипновский Г.Н., Рим Д.В. Инерциальные эффекты в поверхностных и объемных упругих волнах и возможности их использования в твердотельных микрогироскопах // XII Санкт-Петербургская международная конференция по интегрированным навигационным системам. 23-25 мая 2005: Тез. докл. с.275-283). Такие гироскопы представляют собой пластину, закрепленную на торсионах и совершающую вынужденные колебания на собственной резонансной частоте. Эти гироскопы приводятся в колебательное движение путем подачи сигнала на драйвер (как правило, электростатический). При внешнем вращении микромеханического гироскопа возникает сила Кориолиса, создающая колебания относительно измерительной оси. При этом зазор между подвижной массой микромеханического гироскопа и основанием изменяется, что приводит к изменению расстояния между электродами и соответствующей величины емкости. Измеряя изменение величины емкости, можно определить изменение угловой скорости вращения микромеханического гироскопа. Однако вышеуказанные гироскопы имеют низкую точность и низкую механическую прочность.
Известен также «Виброгироскоп» и способ его работы по [3] - (Патент РФ №2123219, H01L 41/08, 1998.12.10), содержащий твердотельный элемент из сегнетоэлектрической керамики с размытым фазовым переходом, в виде монолитного стержня с крестообразным поперечным сечением, с двумя парами сплошных и двумя парами встречно-штыревых электродов. Сплошные электроды соединены параллельно и подключены к выходу первого генератора. Встречно-штыревые электроды подключены к частотно-задающим цепям второго и третьего генераторов. Выходы второго и третьего генераторов подключены к входам смесителя, выход которого подключен к входу детектора, а выход детектора подключен к входу индикатора. Стабильность и помехоустойчивость позволяет применять виброгироскоп в компактных системах навигации и автоматического управления подвижными объектами. Однако этот гироскоп имеет ограничения по рабочим характеристикам из-за принципа действия, который основан на вибрации подвешенных механических структур. Кроме того, эта подвешенная механическая структура очень чувствительна к внешним ударам и вибрации, т.к. она не может быть жестко присоединена к подложке из-за резонансной вибрации. Это ограничивает диапазон его применения.
Известно устройство и способ его работы по «Гироскопу на поверхностных акустических волнах» [4] - (Патент РФ №2310165, G01C 19/56, G01P 9/04, 2007.11.10). Устройство содержит пластину пьезоэлектрика, на которую нанесены встречно-штыревые преобразователи (ВШП) поверхностно-акустических волн (ПАВ) и ВШП чувствительного элемента колебаний ПАВ, отражающие структуры расположены за пределами ВШП, параллельно пластине пьезоэлектрика на расстоянии не более 10 мкм и без соприкосновения с ней установлена полупроводниковая пластина, к которой подключен источник напряжения, а между ВШП чувствительного элемента колебаний ПАВ подключено не менее одного диода, при этом пластина пьезоэлектрика может быть выполнена в виде мембраны. В устройстве используется эффект усиления ультразвуковой резонансной частоты. Наличие тока в полупроводнике, расположенном в непосредственной близости от пластины пьезоэлектрика, приводит к увеличению амплитуды колебаний [5], а диоды выделяют удвоенную частоту. Однако выделение диодами при работе вышеприведенного устройства удвоенной частоты с практической точки зрения малоэффективно. Кроме того, затруднительно размещение полупроводниковой пластины на расстоянии 10 мкм, тем более мембраны при напряжении на ней 100 и более вольт. Из-за высокого напряжения будут существенно увеличены электромагнитные паразитные сигналы (наводки) на ВШП чувствительного элемента колебаний ПАВ, что также будет увеличивать уровень нулевого сигнала (шума). Поэтому данное устройство будет обладать низкой чувствительностью, надежностью и точностью при существенных трудностях в технологии его изготовления.
Известно устройство и способ его работы по «Чувствительному элементу гироскопа на поверхностных акустических волнах» [6] - (Патент РФ №2335739, G01C 19/56, G01P 9/04, 2008.10.10). Устройство содержит пластину пьезоэлектрика, на одной стороне которой сформированы ВШП драйвера ПАВ и отражающие структуры для первичной ПАВ, расположенные за пределами ВШП драйвера ПАВ, а также ВШП чувствительного элемента колебании ПАВ, которые расположены в области наибольшей чувствительности к угловой скорости вращения пластины пьезоэлектрика, на одной из сторон пластины пьезоэлектрика между ВШП драйвера ПАВ на пути распространения ПАВ, формируемых ВШП драйвера ПАВ, образованы дополнительные структуры в виде канавок, которые могут иметь сквозные отверстия в пластине пьезоэлектрика, при этом ВШП чувствительного элемента колебаний ПАВ и канавки могут быть расположены как на одной, так и по разным сторонам пластины пьезоэлектрика, расположение ВШП ПАВ и ВШП чувствительного элемента колебаний ПАВ может быть или параллельным или перпендикулярным друг другу. Увеличение амплитуды колебаний ПАВ достигается формированием канавок на поверхности одной из сторон пластины пьезоэлектрика. Наличие канавок позволяет уменьшить жесткость в направлении распространения вторичной волны. Однако многовариантность возможного выполнения известного устройства, заявленная в формуле изобретения, не позволяет в полной мере применить известный математический аппарат расчета устройства (для его изготовления и применения), и как следствие, практическое его внедрение затруднительно и проблематично. Кроме того, для изготовления канавок необходимо сложное оборудование, что существенно повышает стоимость и сложность изготовления устройства. Канавки и сквозные отверстия в пластине пьезоэлектрика будут являться концентраторами механических напряжений, что в свою очередь приведет к снижению надежности, возникновению паразитных эффектов (возбуждению объемных волн) и сокращению сроков эксплуатации устройства.
В качества прототипа заявляемого устройства выбран способ работы устройства под названием: "Микроэлектромеханический гироскоп" [7] - (Патент US №6984332 В2, H01L 21/00, G01P 3/00, 2006.01.10, V.K.Varadan, Pascal В. Xavier, William D. Suh, Jose A. Kollakompil, Vasundara V.Varadan), как наиболее близкий по совокупности ограничительных признаков.
Способ работы устройства-прототипа [7] состоит в том, что нанесенную на пластину пьезоэлектрика регулярную структуру инерционных масс, расположенных в шахматном порядке, возбуждают в одном направлении стоячей ПАВ активными ВШП с отражающими структурами так, что инерционные массы находятся в ее пучностях, а суммарное поле ПАВ от регулярной структуры инерционных масс, состоящее из дифракционных и сигнальных от сил Кориолиса полей ПАВ, регистрируют в перпендикулярном стоячей ПАВ направлении измерительными ВШП. Дифракционное поле ПАВ на измерительных ВШП регистрируют всегда (без вращения устройства и при его вращении), а сигнальное поле - только при вращении устройства.
Устройство-прототип [7] содержит пластину пьезоэлектрика, на одной стороне которой регулярная структура инерционных масс нанесена в шахматном порядке и в пучностях стоячей ПАВ, возбуждаемой в одном направлении активными ВШП с отражающими структурами, и расположенные в перпендикулярном направлении измерительные ВШП суммарного поля ПАВ от регулярной структуры инерционных масс, состоящего из дифракционных и сигнальных от сил Кориолиса полей ПАВ. Дифракционное поле ПАВ на измерительных ВШП регистрируется всегда (без вращения устройства и при его вращении), а сигнальное поле - только при вращении устройства.
В прототипе [7] регулярная структура масс колеблется под воздействием стоячих ПАВ, которые возбуждаются активными ВШП, при этом возбуждается дифракционное поле ПАВ и на измерительных ВШП этот сигнал регистрируется всегда (без вращения устройства и при его вращении). При повороте гироскопа под воздействием силы Кориолиса регулярная структура инерционных масс возбуждает вторичную ПАВ, принимаемую измерительными ВШП в перпендикулярном направлении. Граница применимости такого гироскопа по воздействию на него линейного ускорения лежит за 1000g. Однако данному гироскопу-прототипу, теоретически реализуемому, присущ один недостаток - он малочувствителен, так как величина К, равная отношению амплитуды сигнала на измерительных ВШП при изменении параметров колебаний регулярной структуры инерционных масс от вращения гироскопа к амплитуде сигнала на измерительных ВШП без вращения, имеет значение порядка 0,00001, что препятствует использованию этого устройства на практике:

ξк - амплитуда сигнала на измерительных ВШП при изменении параметров колебаний регулярной структуры инерционных масс от вращения гироскопа;
ξ - амплитуда сигнала на измерительных ВШП без вращения;
Ω - угловая скорость вращения гироскопа;
ω - круговая частота колебаний регулярной структуры инерционных масс;
ƒ - циклическая частота колебаний регулярной структуры инерционных масс.
Отношение величины полезного сигнал к величине сигнала на измерительных ВШП без вращения устройства является величиной крайне малой и требует очень чувствительной регистрирующей аппаратуры.
Для устранения основного недостатка - повышения чувствительности гироскопа и его практического использования необходимо обеспечить уровень полезного сигнала на измерительных ВШП от вращения объекта, сравнимый с уровнем сигнала при отсутствии вращения объекта, т.е. обеспечить значения величины К, введенной ранее, порядка единицы.
Указанная задача решается тем, что в способе работы микроакустоэлектромеханического гироскопа, состоящем в том, что нанесенную на пластину пьезоэлектрика регулярную структуру инерционных масс возбуждают в одном направлении стоячей ПАВ при помощи активных ВШП с отражающими структурами так, что инерционные массы находятся в ее пучностях, а суммарное поле ПАВ от регулярной структуры инерционных масс, состоящее из дифракционных и сигнальных от сил Кориолиса полей ПАВ, регистрируют в перпендикулярном стоячей ПАВ направлении измерительными ВШП, вводят вторую, идентичную первой, пластину пьезоэлектрика, которую устанавливают вместе с первой пластиной пьезоэлектрика их свободными поверхностями симметрично по разные стороны несущего диэлектрического основания, измерительные ВШП пластин электрически соединяют между собой и суммируют сигналы с двух пластин, а активные ВШП обеих пластин возбуждают в противофазе, чем вычитают шумовую составляющую принимаемого сигнала и увеличивают полезный сигнал, пропорциональный силе Кориолиса.
Вышеизложенная задача в устройстве для осуществления способа работы микроакустоэлектромеханического гироскопа решается тем, что в микроакустоэлектромеханическом гироскопе, содержащем пластину пьезоэлектрика, на одной из сторон которой регулярная структура инерционных масс нанесена в пучностях стоячей ПАВ, возбуждаемой в одном направлении активными ВШП с отражающими структурами, и расположенные в перпендикулярном направлении измерительные ВШП суммарного поля ПАВ от регулярной структуры инерционных масс, состоящего из дифракционных и сигнальных от сил Кориолиса полей ПАВ, дополнительно содержит вторую, идентичную первой, пластину пьезоэлектрика с регулярной структурой инерционных масс, активными ВШП с отражающими структурами и измерительными ВШП, первая и вторая пластины свободными поверхностями симметрично установлены по разные стороны несущего диэлектрического основания, измерительные ВШП, расположенные симметрично по разные стороны несущего диэлектрического основания, электрически соединены между собой, а активные ВШП, расположенные симметрично по разные стороны несущего диэлектрического основания, возбуждаются в противофазе.
Введение дополнительной «второй, идентичной первой, пластины пьезоэлектрика с регулярной структурой инерционных масс, активными ВШП с отражающими структурами и измерительными ВШП при том, что их симметрично расположенные относительно несущего диэлектрического основания измерительные ВШП пластин электрически соединены между собой, а их активные ВШП возбуждаются электрически в противофазе» необходимо для уменьшения уровня сигнала на измерительных ВШП без вращения и увеличения в разы уровня появляющегося при вращении полезного сигнала.
Так, известен способ улучшения соотношения сигнал/шум, вытекающий из устройства [8] - (патент Канады № СА 824223, 30.09.1969 г., автор Dolby Ray М), в котором полезный сигнал отделяется от уровня шума, а сигнал шума разделяется на два идентичных сигнала, один из которых инвертируется, складывается с первым и подавляется.
Однако для реализации известного способа шумоподавления по устройству [8] необходимо использование множества дополнительных устройств (разделители сигналов, фазовращатели, инверторы, сумматоры), что существенно усложняет конструкцию устройства для реализации способа, увеличивает его стоимость и снижает надежность. Причем применение таких дополнительных устройств для микроакустоэлектромеханических гироскопов не известно. Кроме того, способ шумоподавления по устройству [8] не позволяет увеличить в разы уровень (появляющегося при вращении гироскопа) полезного сигнала, без его усиления дополнительными устройствами, что имеет место в предложенном способе.
Введение «несущего диэлектрического основания» необходимо для конструктивного исполнения гироскопа - симметричной установки на нем свободными поверхностями двух идентичных пластин пьезоэлектрика с регулярной структурой инерционных масс, активными ВШП с отражающими структурами и измерительными ВШП. Также при помощи несущего диэлектрического основания происходит крепление (монтаж) гироскопа. Несущее диэлектрическое основание позволяет исключить взаимные наводки от обеих пластин пьезоэлектрика друг на друга, укреплять на нем дополнительные и вспомогательные элементы гироскопа, а также существенно повысить надежность устройства в целом.
Использование двух идентичных друг другу пластин в микроакустоэлектромеханической системе гироскопов и возбуждение их активных ВШП в противофазе, а также электрическое соединение симметрично расположенных измерительных ВШП позволяет уменьшить уровень сигнала на измерительных ВШП без вращения и увеличить в разы уровень появляющегося при вращении полезного сигнала не известно из уровня техники, что позволяет утверждать соответствие предложения критерию «изобретательский уровень».
Новым в заявляемом техническом решении является использование двух симметрично расположенных идентичных пластин гироскопов, у которых измерительные ВШП симметрично расположены по разные стороны несущего диэлектрического основания и электрически соединены между собой для суммирования сигналов с двух пластин. Возбуждение активных ВШП двух пластин происходит в противофазе, для обеспечения вычитания шумовой составляющей принимаемого сигнала и увеличения в разы полезного сигнала, пропорционального силе Кориолиса  , определяемой угловой скоростью вращения объекта.
, определяемой угловой скоростью вращения объекта.

m - масса элемента регулярной инерционной структуры масс;
 - вектор угловой скорости;
- вектор угловой скорости;
 - вектор колебательной скорости элемента регулярной инерционной структуры масс.
- вектор колебательной скорости элемента регулярной инерционной структуры масс.
В целом это позволяет увеличить отношение сигнал/шум на выходе устройства и приблизит его к единице (К≈1).
Устройство технологично в изготовлении, просто в эксплуатации и применимо в датчиках угловой скорости любого назначения, особенно при эксплуатации в условиях больших ускорений, что доказывает соответствие технического решения критерию «промышленная применимость».
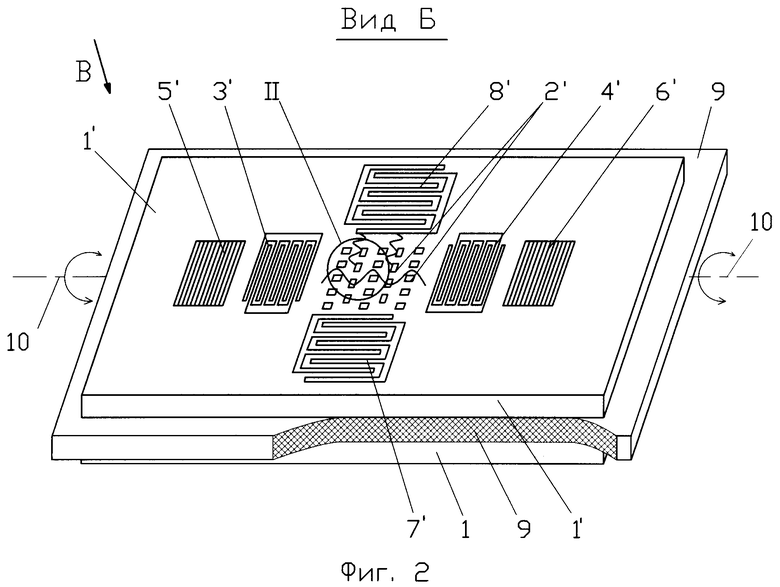
Сущность предложения поясняется чертежами, где на фиг.1 представлен внешний вид гироскопа (вид В); на фиг.2 обратная сторона гироскопа (вид Б);
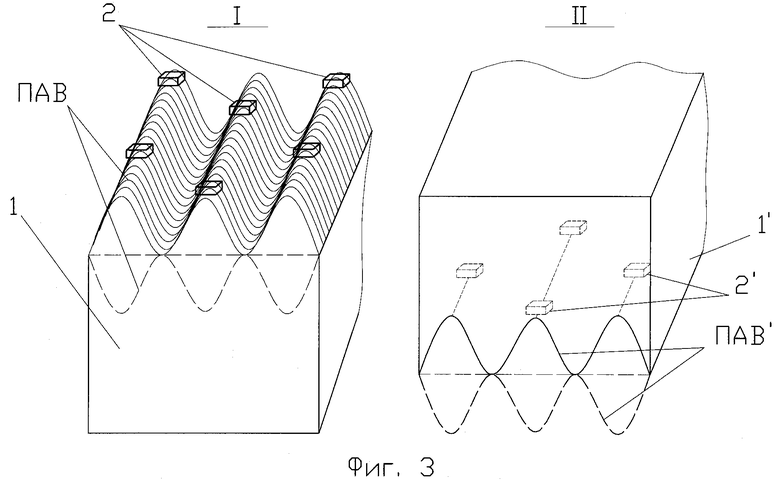
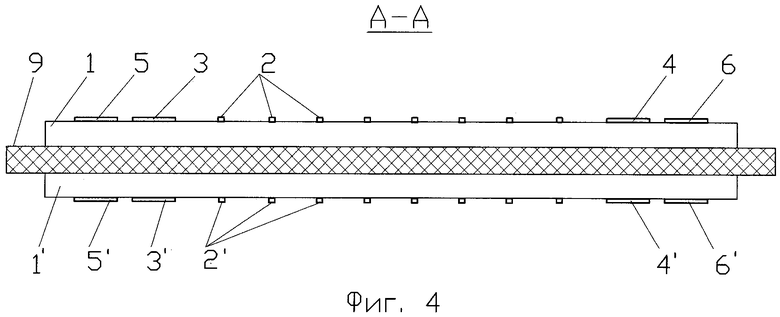
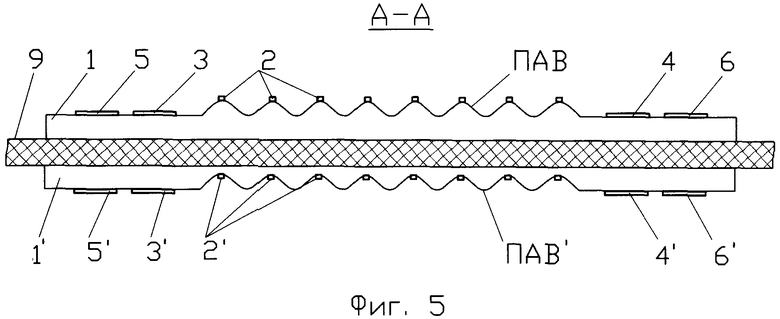
на фиг.3 - схематичное изображение стоячей ПАВ с расположенными на нем элементами регулярной структуры масс на обеих пластинах по фиг.1; на фиг.4 - разрез А-А по фиг.1 без возбуждения стоячей ПАВ; на фиг.5 - разрез А-А по фиг.1 при возбуждения стоячей ПАВ.
Гироскоп содержит две идентичные пластины 1 и 1I пьезоэлектрика, на одной стороне которых нанесены регулярные структуры 2 и 2I инерционных масс в пучностях стоячей ПАВ, которая возбуждается в одном направлении активными ВШП 3, 4 и 3I и 4I с отражающими структурами 5, 6 и 5I, 6I, и расположенные в перпендикулярном направлении измерительные ВШП 7, 8 и 7I, 8I суммарного поля ПАВ от соответственно регулярных структур 2 и 2I инерционных масс, состоящего из дифракционных и сигнальных от сил Кориолиса полей ПАВ. Первая и вторая пластины 1 и 1I пьезоэлектрика свободными поверхностями симметрично установлены по разные стороны несущего диэлектрического основания 9, измерительные ВШП 7, 7I и 8, 8I пластин соединены соответственно между собой, а их активные ВШП 3, 4 и 3I, 4I возбуждаются в противофазе. Вращение гироскопа осуществляется вокруг оси чувствительности 10 (вращения).
Гироскоп работает следующим образом: активные ВШП 3, 4 и 3I и 4I возбуждают на поверхности пластин пьезоэлектрика 1 и I1 стоячие ПАВ, которые приводят в движение регулярные структуры 2 и 2I инерционных масс, расположенных на поверхностях обеих пластин 1 и 1. На активные ВШП 3, 4 и 3I и 4I, находящиеся по разные стороны от несущего диэлектрического основания 9, подаются возбуждающие электрические сигналы в противофазе для обеспечения антисимметричных колебаний поверхностей пластин с регулярными структурами 2 и 2I инерционных масс и для обеспечения взаимной компенсации шумовых сигналов на измерительных ВШП 7, 8 и 7I, 8I. При наличии угловой скорости объекта, на котором размещен гироскоп (при его вращении вокруг оси 10), происходят дополнительные возмущения регулярных структур 2 и 2I инерционных масс за счет воздействия на них силы Кориолиса в направлении, перпендикулярном оси 10 чувствительности (вращения) гироскопа, в котором расположены измерительные ВШП 7, 8 и 7I 8I. Таким образом, полезные сигналы на измерительных ВШП 7, 8 и 7I, 8I двух пластин 1 и 1I пьезоэлектрика синфазно складываются (увеличиваясь в разы). То есть, за счет однонаправленного движения регулярных структур 2 и 2I инерционных масс на обеих пластинах 1 и 1I происходит взаимное суммирование полезных сигналов на измерительных ВШП 7, 8 и 7I, 8I, а за счет противофазного возбуждения регулярных структур 2 и 2I инерционных масс шумовые составляющие обеих пластин 1 и 1I на измерительных ВШП 7, 8 и 7I, 8I взаимно компенсируются.
Таким образом, возбуждение активных ВШП 3, 4 и 3I, 4I в противофазе, а также электрическое соединение симметрично расположенных измерительных ВШП 7, 7I и 8, 8I позволяет уменьшить уровень шумового сигнала на измерительных ВШП 7, 7I и 8, 8I при отсутствии вращения объекта и в разы увеличить уровень полезного сигнала на этих ВШП при вращении гироскопа вокруг оси 10.
Литература:
1. Морган Д. Устройства обработки сигналов на поверхностных акустических волнах / Пер. с англ. М.: Радио и связь, 1990.
2. Сарапулов С.Л., Скрипновский Г.И., Рим Д.В. Инерциальные эффекты в поверхностных и объемных упругих волнах и возможности их использования в твердотельных микрогироскопах // XII Санкт-Петербургская международная конференция по интегрированным навигационным системам. 23-25 мая 2005: Тез. докл. с.275-283.
3. Патент РФ №2123219, H01L 41/08, 1998.12.10.
4. Патент РФ №2310165, G01C 19/56, G01P 9/04, 2007.11.10.
5. Морган Д. Устройства обработки сигналов на поверхностных акустических волнах. / Пер. с англ. М.: Радио и связь, 1990.
6. Патент РФ №2335739, G01C 19/56, G01P 9/04, 2008.10.10.
7. Патент США №6984332 В2, H01L 21/00, G01P 3/00, 2006.01.10, V.K.Varadan, Pascal В. Xavier, William D. Suh, Jose A. Kollakompil, Vasundara V.Varadan. / "Микроэлектромеханический гироскоп") - прототип.
8. Патент Канады № СА 824223, 30.09.1969 г., автор Dolby Ray M.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОДИФИЦИРОВАННЫЙ МИКРОАКУСТОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2015 |
|
RU2582483C1 |
| ГИРОСКОП НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 2009 |
|
RU2390727C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ГИРОСКОП | 2009 |
|
RU2387951C1 |
| МИКРОАКУСТОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2013 |
|
RU2543706C1 |
| ГИРОСКОП НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 2006 |
|
RU2310165C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ (ВАРИАНТЫ) | 2007 |
|
RU2359275C1 |
| ЭЛЕКТРОННЫЙ ГИРОСКОП | 2007 |
|
RU2357212C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2392626C1 |
| ВИБРАЦИОННЫЙ ГИРОСКОП НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 2007 |
|
RU2348902C1 |
| РЕЗОНАНСНЫЙ ГИРОСКОП НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ С РАЗДЕЛЕНИЕМ ЧАСТОТ | 2007 |
|
RU2347189C1 |
Изобретение относится к акустоэлектронным приборам, предназначенным для преобразования угловой скорости вращения объектов в электрический сигнал, и может быть использовано в системах навигации, ориентации и управления подвижными объектами. Гироскоп содержит две идентичные пластины 1 и 1I пьезоэлектрика, на одной стороне которых нанесены регулярные структуры инерционных масс в пучностях стоячей поверхностной акустической волны (ПАВ), которая возбуждается в одном направлении активными встречно-штыревыми преобразователями (ВШП) с отражающими структурами, и расположенные в перпендикулярном направлении измерительные ВШП суммарного поля ПАВ регулярных структур инерционных масс, состоящего из дифракционных и сигнальных от сил Кориолиса полей ПАВ. Изобретение позволяет уменьшить уровень шумового сигнала на измерительных ВШП при отсутствии вращения объекта и в разы увеличить уровень полезного сигнала на этих ВШП при вращении гироскопа вокруг оси 10. 1 з.п. ф-лы, 5 ил.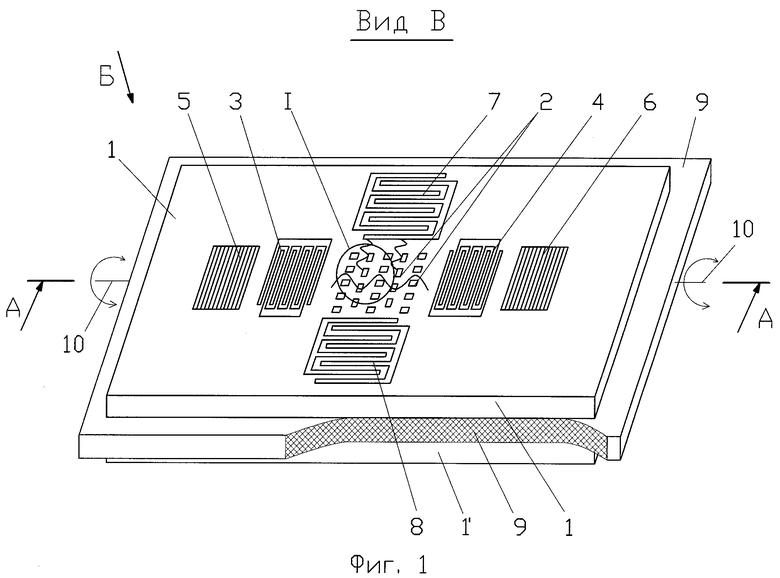
1. Микроакустоэлектромеханический гироскоп, содержащий пластину пьезоэлектрика, на одной стороне которой регулярная структура инерционных масс нанесена в пучностях стоячей поверхностной акустической волны (ПАВ), возбуждаемой в одном направлении активными встречно-штыревыми преобразователями (ВШП) с отражающими структурами, и расположенные в перпендикулярном направлении измерительные ВШП суммарного поля ПАВ от регулярной структуры инерционных масс, состоящего из дифракционных и сигнальных от сил Кориолиса полей ПАВ, отличающийся тем, что он содержит вторую, идентичную первой, пластину пьезоэлектрика с регулярной структурой инерционных масс, активными ВШП с отражающими структурами и измерительными ВШП, первая и вторая пластины свободными поверхностями симметрично установлены по разные стороны несущего диэлектрического основания, измерительные ВШП пластин, расположенные симметрично по разные стороны несущего диэлектрического основания, электрически соединены между собой, а активные ВШП, расположенные симметрично по разные стороны несущего диэлектрического основания, возбуждаются в противофазе.
2. Способ работы микроакустоэлектромеханического гироскопа по п.1, состоящий в том, что нанесенную на пластину пьезоэлектрика регулярную структуру инерционных масс возбуждают в одном направлении стоячей поверхностной акустической волной (ПАВ) при помощи активных встречно-штыревых преобразователей (ВШП) с отражающими структурами так, что инерционные массы находятся в ее пучностях, а суммарное поле ПАВ от регулярной структуры инерционных масс, состоящего из дифракционных и сигнальных от сил Кориолиса полей ПАВ регистрируют в перпендикулярном стоячей ПАВ направлении измерительными ВШП, отличающийся тем, что вводят вторую, идентичную первой, пластину пьезоэлектрика, которую устанавливают вместе с первой пластиной пьезоэлектрика их свободными поверхностями симметрично по разные стороны несущего диэлектрического основания, измерительные ВШП пластин электрически соединяют между собой и суммируют сигналы с двух пластин, а активные ВШП обеих пластин возбуждают в противофазе, чем вычитают шумовую составляющую принимаемого сигнала и увеличивают полезный сигнал, пропорциональный силе Кориолиса.
| US 6984332 В2, 10.01.2006 | |||
| РЕЗОНАНСНЫЙ ГИРОСКОП НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ С РАЗДЕЛЕНИЕМ ЧАСТОТ | 2007 |
|
RU2347189C1 |
| ГИРОСКОП НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 2006 |
|
RU2310165C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ГИРОСКОПА НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 2007 |
|
RU2335739C1 |
| ВИБРОГИРОСКОП | 1997 |
|
RU2123219C1 |
| ГИРОСКОП НА ПОВЕРНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 2006 |
|
RU2329466C1 |

