Изобретение относится к акустоэлектронным приборам, предназначенным для преобразования угловой скорости вращения основания в электрический сигнал, и может быть использовано в системах навигации, ориентации и управления различными подвижными объектами.
Известны аналоги микроакустомеханического гироскопа, предложенные, например, в [1] (Патент Российской Федерации №2387951 «Пьезоэлектрический гироскоп» / В.А. Калинин, В.Д. Лукьянов, В.А. Шубарев, В.А. Мельников, заявка №2009109735/28 от 17.03.2009; опубликовано 27.04.2010. Бюл. №12), [2] (Патент Российской Федерации №2390727 «Гироскоп на поверхностных акустических волнах» / В.А. Калинин, В.Д. Лукьянов, В.А. Шубарев, В.А. Мельников, заявка №2009109734/28 от 17.03.2009; опубликовано 27.05.2010. Бюл. №15), содержащие несущее диэлектрическое основание с установленной на нем пластиной пьезоэлектрика, на одной стороне которой нанесены регулярная структура инерционных масс, активный встречно-штыревой преобразователь (ВШП) с отражающей структурой, возбуждающие поверхностные акустические волны (ПАВ) в одном направлении и расположенные в перпендикулярном направлении измерительные ВШП суммарного поля ПАВ от регулярной структуры инерционных масс, состоящего из дифракционных и сигнальных от сил Кориолиса полей ПАВ, при этом по [1] напротив активного ВШП после регулярной структуры инерционных масс на пластину нанесен поглощающий ВШП, выходы которого электрически соединены проводниками с комплексным и регулируемым сопротивлением нагрузки либо по [2] напротив активного ВШП после регулярной структуры инерционных масс на пластину пьезоэлектрика нанесен поглощающий ПАВ слой с коэффициентом отражения, близким к нулю, и выполненный в виде клина, острием, направленным к регулярной структуре инерционных масс.
Существенным недостатком отмеченных аналогов, сдерживающим практическое применение гироскопа, является ограничение его функциональных возможностей, обусловленное тем, что данное устройство обеспечивает регистрацию угловой скорости вращения несущего основания только относительно одного направления его вращения. Для регистрации угловых скоростей относительно двух направлений вращения несущего основания необходимо на нем дополнительно установить второй аналогичный гироскоп, что приводит к усложнению конструкции и увеличению ее стоимости.
По совокупности признаков наиболее близким аналогом предлагаемого устройства, принимаемым за прототип, является микроэлектромеханический гироскоп, описанный в [3] (Патент US №6984332 В2, H01L 21/00, G01P 3/00, 2006.01.10, V.K Varadan, Pascal B. Xavier, William D. Suh, Jose A. Kollakompil, Vasundara V. Varadan / «MICRO-ELECTRO-MECHANICAL GYROSCOPE»), который содержит пластину пьезоэлектрика, на одной стороне которой в шахматном порядке и в пучностях стоячей ПАВ нанесена регулярная структура инерционных масс, активные ВШП с отражающими структурами, возбуждающие ПАВ в одном направлении, и расположенные в перпендикулярном направлении измерительные ВШП суммарного поля ПАВ от регулярной структуры инерционных масс, состоящего из дифракционных и сигнальных от сил Кориолиса полей ПАВ. Принцип действия устройства-прототипа состоит в том, что нанесенную на пластину пьеэоэлектрика регулярную структуру инерционных масс, расположенных в шахматном порядке, возбуждают в одном направлении стоячей ПАВ активными ВШП с отражающими структурами так, что инерционные массы находятся в ее пучностях, а суммарное поле ПАВ от регулярной структуры инерционных масс, состоящее из дифракционных и сигнальных от сил Кориолиса полей ПАВ, регистрируют в перпендикулярном стоячей ПАВ направлении измерительными ВШП, при этом дифракционное поле ПАВ на измерительных ВШП регистрируют как без вращения устройства, так и при его вращении, а сигнальное поле - только при вращении устройства.
Существенным недостатком прототипа, сдерживающим его практическое применение, является ограничение его функциональных возможностей, обусловленное тем, что данное устройство обеспечивает регистрацию угловой скорости вращения несущего основания только относительно одного направления его вращения. Для регистрации угловых скоростей относительно двух направлений вращения несущего основания необходимо на нем дополнительно установить второй аналогичный гироскоп, что приводит к усложнению конструкции и увеличению ее стоимости.
Целью создания предлагаемого технического решения является расширения функциональных возможностей за счет преобразования угловых скоростей вращения несущего основания в электрические сигналы одновременно относительно двух осей его вращения.
Для достижения указанной цели предлагается микроакустомеханический гироскоп, содержащий несущее основание, регулярную структуру инерционных масс, размещенных в шахматном порядке, активные пьезоэлектрические преобразователи и измерительные ВШП суммарного поля ПАВ от регулярной структуры инерционных масс, состоящего из дифракционных и сигнальных от сил Кориолиса полей ПАВ.
Согласно изобретению в предлагаемом микроакустомеханическом гироскопе несущее основание выполнено из изотропного материала, на внешней поверхности несущего основания нанесена тонкая пленка из пьезоэлектрика с установленными на ней регулярной структурой инерционных масс и измерительными ВШП для каждого из направлений вращения несущего основания, при этом измерительные ВШП размещены симметрично относительно положения регулярной структуры инерционных масс и перпендикулярно осям вращения несущего основания, на внутренней поверхности несущего основания выполнен трапецеидальный выступ, большее основание которого обращено в сторону внешней поверхности несущего основания, активные пьезоэлектрические преобразователи установлены симметрично друг другу на боковых поверхностях трапецеидального выступа и обеспечивают возбуждение продольных акустических волн в материале несущего основания в направлениях, определяемых углом Q.
При этом
SINQ=VL/VR,
где VL - скорость продольных волн в материале несущего основания;
VR - скорость ПАВ,
а угол Q задан положением боковых поверхностей трапецеидального выступа относительно внешней поверхности несущего основания.
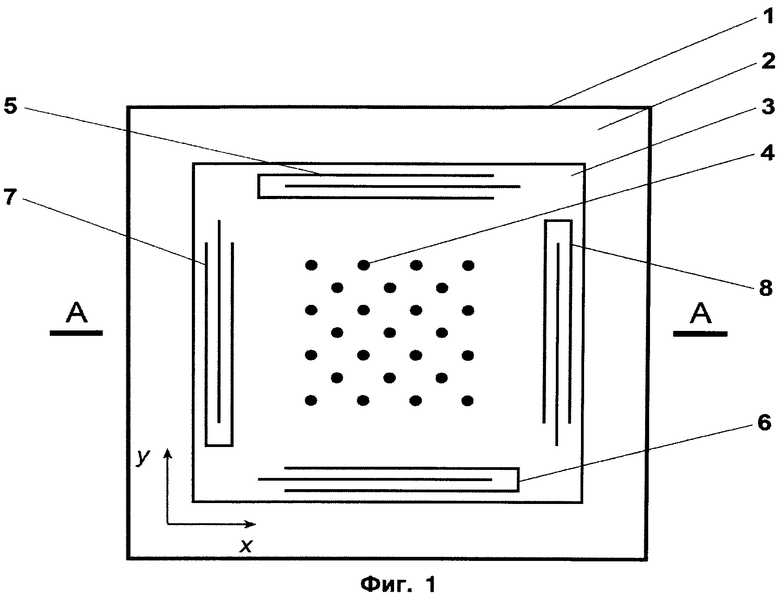
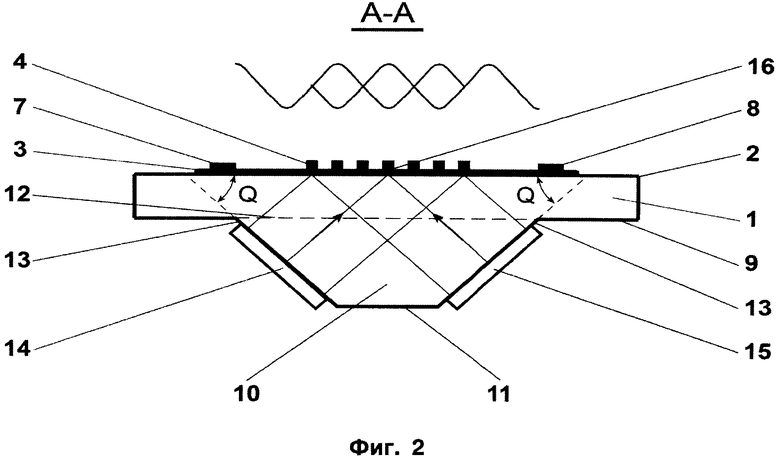
На фиг.1 схематически представлен предлагаемый микроакустомеханический гироскоп (вид сверху), на фиг.2 - разрез А-А.
Предлагаемый микроакустомеханический гироскоп (фиг.1) содержит несущее основание 1, выполненное из изотропного материала, на внешней поверхности 2 которого нанесена тонкая пленка 3 из пьезоэлектрика с установленными на ней регулярной структурой инерционных масс 4 и измерительными ВШП 5, 6 (относительно оси X) и 7, 8 (относительно оси Y) соответственно суммарного поля ПАВ от регулярной структуры инерционных масс 4, состоящего из дифракционных и сигнальных от сил Кориолиса полей ПАВ.
На внутренней поверхности 9 (фиг.2) несущего основания 1 выполнен трапецеидальный выступ 10, имеющий малое основание 11, большее основание 12 и боковые поверхности 13, при этом большее основание 12 обращено в сторону внешней поверхности 2 несущего основания 1.
Боковые поверхности 13 трапецеидального выступа 10 образуют с внешней поверхностью 2 несущего основания 1 угол Q, который выбирается из условия оптимального возбуждения ПАВ на внешней поверхности 2 несущего основания 1:
SINQ=VL/VR,
где VL - скорость продольных волн в материале несущего основания 1,
VR - скорость ПАВ.
Угол Q задан положением боковых поверхностей 13 трапецеидального выступа 10 относительно внешней поверхности 2 несущего основания 1.
На боковых поверхностях 13 трапецеидального выступа 10 симметрично друг другу установлены активные пьезоэлектрические преобразователи 14 и 15, которые обеспечивают возбуждение продольных акустических волн в материале несущего основания 1 в направлениях, определяемых углом Q.
Измерительные ВШП 5, 6 (относительно оси X) и 7, 8 (относительно оси Y) установлены на пленке 3 симметрично относительно положения регулярной структуры инерционных масс 4 и перпендикулярно осям вращения несущего основания 1.
Инерционные массы в регулярной структуре инерционных масс 4 размещены в шахматном порядке с расстояниями между ними, обеспечивающими преимущественное излучение в направлениях к измерительным ВШП 5, 6 и 7, 8.
Предлагаемый микроакустомеханический гироскоп работает следующим образом.
Активные пьезоэлектрические преобразователи 14 и 15 возбуждают в несущем основании 1 продольные волны, которые при взаимодействии с внешней поверхностью 2 несущего основания 1 возбуждают ПАВ, бегущие в разные стороны по оси X.
В области 16 (фиг.2) интерференции пучков продольных волн на внешней поверхности 2 несущего основания 1 по месту размещения регулярной структуры инерционных масс 4 образуется стоячая волна с расстояниями между пучностями, равными:
λR/2,
где λR=VR/f - частота возбуждения.
Под воздействием стоячих волн массы регулярной структуры инерционных масс 4 совершают вертикальные (вдоль оси Z) (на фиг.2 не показаны) колебания и, в свою очередь, являются источниками ПАВ, которые распространяются вдоль осей Х и Y. Таким образом, из области 16 интерференции пучков продольных волн в стороны измерительных ВШП 5, 6 и 7, 8 распространяются бегущие волны, которые детектируются данными ВШП. В результате на выходах измерительных ВШП 5, 6 и 7, 8 возникают соответствующие сигналы.
При вращении несущего основания 1 относительно оси Х на движущиеся вдоль оси Z массы воздействует сила Кориолиса, направленная вдоль оси Y:
F=2m(Ω×V),
где m - масса колеблющейся структуры;
Ω - угловая скорость вращения гироскопа;
V - колебательная скорость массы.
Под воздействием этой силы генерируется дополнительная ПАВ, которая изменяет электрические сигналы на выходах ВШП 7 и 8. Это изменение пропорционально угловой скорости Ω, направленной вдоль оси Х, и фиксируется соответствующим измерителем (не показан). На выходе ВШП 5 и 6 сигналы остаются практически неизменными.
При вращении несущего основания 1 относительно оси Y происходят аналогичные явления, а полезные сигналы возникают на выходах ВШП 5 и 6.
При одновременном вращении несущего основания 1 относительно осей Х и Y полезные сигналы возникают на всех измерительных ВШП 5, 6 и 7, 8, причем уровень сигналов на выходах ВШП 7 и 8 соответствует скорости вращения относительно оси X, а уровень сигналов на выходах ВШП 5, 6 соответствует скорости вращения относительно оси Y. Таким образом, регистрируются полезные сигналы, позволяющие определить скорости вращения несущего основания 1 относительно двух осей его вращения.
Проведенный сравнительный анализ выявил, что в отличие от устройств-аналогов и устройства-прототипа предлагаемый микроакустомеханический гироскоп характеризуется новыми признаками, а именно новыми конструктивными элементами, имеющими новые форму и расположение в предлагаемом устройстве, позволяющими расширить функциональные возможности за счет преобразования угловых скоростей вращения несущего основания в электрические сигналы одновременно относительно двух осей вращения.
Предлагаемое устройство, сохраняя положительные качества приведенных в описании аналогов и прототипа, отличается по сравнению с ними расширением функциональных возможностей за счет преобразования угловых скоростей вращения несущего основания в электрические сигналы одновременно относительно двух осей вращения и может быть применено в системах навигации, ориентации и управления различными подвижными объектами.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОДИФИЦИРОВАННЫЙ МИКРОАКУСТОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2015 |
|
RU2582483C1 |
| МИКРОАКУСТОЭЛЕКТРОМЕХАНИЧЕСКИЙ ГИРОСКОП И СПОСОБ ЕГО РАБОТЫ | 2009 |
|
RU2389000C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ГИРОСКОП | 2009 |
|
RU2387951C1 |
| ГИРОСКОП НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 2009 |
|
RU2390727C1 |
| ГИРОСКОП НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 2006 |
|
RU2310165C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2392626C1 |
| ВИБРАЦИОННЫЙ ГИРОСКОП НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 2007 |
|
RU2348902C1 |
| РЕЗОНАНСНЫЙ ГИРОСКОП НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ С РАЗДЕЛЕНИЕМ ЧАСТОТ | 2007 |
|
RU2347189C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2387998C1 |
| ЭЛЕКТРОННЫЙ ГИРОСКОП | 2007 |
|
RU2357212C1 |
Изобретение относится к акустоэлектронным приборам, предназначенным для преобразования угловой скорости вращения основания в электрический сигнал. Микроакустомеханический гироскоп содержит основание, структуру инерционных масс, размещенных в шахматном порядке, пьезоэлектрические преобразователи и измерительные ВШП суммарного поля ПАВ от регулярной структуры инерционных масс. На внешней поверхности несущего основания нанесена тонкая пленка из пьезоэлектрика с установленными на ней регулярной структурой инерционных масс и измерительными ВШП для каждого из направлений вращения. При этом измерительные ВШП размещены симметрично относительно положения регулярной структуры инерционных масс и перпендикулярно осям вращения несущего основания. На внутренней поверхности несущего основания выполнен трапецеидальный выступ, большее основание которого обращено в сторону внешней поверхности несущего основания, активные пьезоэлектрические преобразователи установлены симметрично друг другу на боковых поверхностях трапецеидального выступа. Технический результат заключается в обеспечении преобразования угловых скоростей вращения несущего основания в электрические сигналы одновременно относительно двух осей вращения. 2 ил.
Микроакустомеханический гироскоп, содержащий несущее основание, регулярную структуру инерционных масс, размещенных в шахматном порядке, активные пьезоэлектрические преобразователи и измерительные встречно-штыревые преобразователи суммарного поля поверхностных акустических волн от регулярной структуры инерционных масс, состоящего из дифракционных и сигнальных от сил Кориолиса полей поверхностных акустических волн, отличающийся тем, что несущее основание выполнено из изотропного материала, на внешней поверхности несущего основания нанесена тонкая пленка из пьезоэлектрика с установленными на ней регулярной структурой инерционных масс и измерительными встречно-штыревыми преобразователями для каждого из направлений вращения несущего основания, при этом измерительные встречно-штыревые преобразователи размещены симметрично относительно положения регулярной структуры инерционных масс и перпендикулярно осям вращения несущего основания, на внутренней поверхности несущего основания выполнен трапецеидальный выступ, большее основание которого обращено в сторону внешней поверхности несущего основания, активные пьезоэлектрические преобразователи установлены симметрично друг другу на боковых поверхностях трапецеидального выступа и обеспечивают возбуждение продольных акустических волн в материале несущего основания в направлениях, определяемых углом Q, при этом
SIN Q=VL/VR,
где VL - скорость продольных волн в материале несущего основания;
VR - скорость поверхностной акустической волны;
а угол Q задан положением боковых поверхностей трапецеидального выступа относительно внешней поверхности несущего основания.
| МИКРОАКУСТОЭЛЕКТРОМЕХАНИЧЕСКИЙ ГИРОСКОП И СПОСОБ ЕГО РАБОТЫ | 2009 |
|
RU2389000C1 |
| ГИРОСКОП НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 2009 |
|
RU2390727C1 |
| JP 62148812 A 02.07.1987 | |||
| KR 1020090016960 A 18.02.2009 | |||

