Изобретение относится к измерительной технике для преобразования в электрические сигналы ускорений. Устройство может быть применено в ортопедии как система контроля положения позвоночника в трехмерном пространстве его движения за счет измерения 3-х линейных и 3-х угловых ускорений общего центра масс (ОЦМ) тела пациента.
Для измерения и контроля положения позвоночника используется большое количество опосредованных методов, например система контроля положения позвоночника по патенту РФ №02304920, основанная на контроле давления в соединенной с позвоночником эластичной емкости. Данные методы не позволяют получить данные о линейных и угловых ускорениях позвоночника. Для измерения данных ускорений может быть использован акселерометр - полупроводниковый датчик величины и направления ускорения. Так, например, известен принятый за прототип двухбалочный акселерометр по патенту РФ №02324192, который принят за прототип, содержащий две упругие тензометрированные балки, одни концы которых неподвижны, а другие соединены с двумя грузами, соединенными между собой упруго.
Общими существенными признаками прототипа и предлагаемого технического решения являются следующие: многобалочный акселерометр для измерения ускорений физического тела содержит более одной упругой тензометрированной балки и механический диполь в виде двух разнесенных масс.
Данный акселерометр позволяет измерить линейное ускорение по двум осям, что позволит в системе контроля положения ОЦМ позвоночника фиксировать лишь две линейные координаты.
Предлагаемым изобретением решается следующая техническая задача - измерение одновременно и одноместно 3-х линейных и 3-х угловых ускорений. Наличие такой информации в электрических сигналах позволяет путем интегрирования по времени этих сигналов восстановить траекторию движения ОЦМ позвоночника.
Для решения данной технической задачи в многобалочном акселерометре для измерения ускорений физического тела, содержащем более одной упругой тензометрированной балки и механический диполь в виде двух соединенных между собой тягой разнесенных масс, количество упругих тензометрированных балок не менее шести, они соединены между собой в многокомпонентную балку последовательно так, что каждая из балок имеет наибольшую чувствительность к одной из компонент пары сил, вызванных тремя линейными и тремя угловыми ускорениями общего центра масс физического тела, при этом один конец многокомпонентной балки соединен с выполненной жесткой тягой механического диполя, ось которой расположена под углом к оси многокомпонентной балки, а второй конец многокомпонентной балки закреплен на физическом теле, притом каждая тензометрированная балка содержит тензорезисторы, объединенные в тензомост, а выходы тензомостов подключены к электронной модели многобалочного акселерометра.
Отличительными признаками предлагаемого акселерометра являются следующие: количество упругих тензометрированных балок не менее шести, они соединены между собой в многокомпонентную балку последовательно так, что каждая из балок имеет наибольшую чувствительность к одной из компонент пары сил, вызванных тремя линейными и тремя угловыми ускорениями общего центра масс физического тела, при этом один конец многокомпонентной балки соединен с выполненной жесткой тягой механического диполя, ось которой расположена под углом к оси многокомпонентной балки, а второй конец многокомпонентной балки закреплен на физическом теле, притом каждая тензометрированная балка содержит тензорезисторы, объединенные в тензомост, а выходы тензомостов подключены к электронной модели многобалочного акселерометра.
Каждый из шести тензомостов многобалочного акселерометра несет информацию не только о компоненте, на которую он настроен, но также и о перекрестной компоненте. Поэтому первые усилители содержат на выходе информацию о компоненте с погрешностью. С целью уменьшения погрешности применена электронная модель, настраиваемая при тарировке акселерометра, содержащая 6 первых усилителей с фиксированным коэффициентом передачи, входы которых подключены к выходам соответствующих тензомостов, и 30 вторых усилителей с управляемым напряжением коэффициентом передачи, причем каждый из первых 6 усилителей и каждые 5 из 30 вторых усилителей объединены в последовательную i-ю цепочку, а управляющие входы вторых усилителей, входящих в i-ю цепочку, соединены со входами соответствующих первых усилителей, не входящих в i-ю цепочку.
Кроме того, для получения траектории движения физического тела многобалочный акселерометр дополнительно содержит интегратор по времени выходных сигналов электронной модели.
Благодаря наличию данных отличительных признаков стало возможным измерить одноместно и одновременно 3 угловых и 3 линейных ускорения. Полученная таким образом информация позволяет путем интегрирования ее во времени восстановить траекторию движения ОЦМ тела.
Изобретение поясняется фиг.1-2.
На фиг.1 приведен рисунок многобалочного акселерометра.
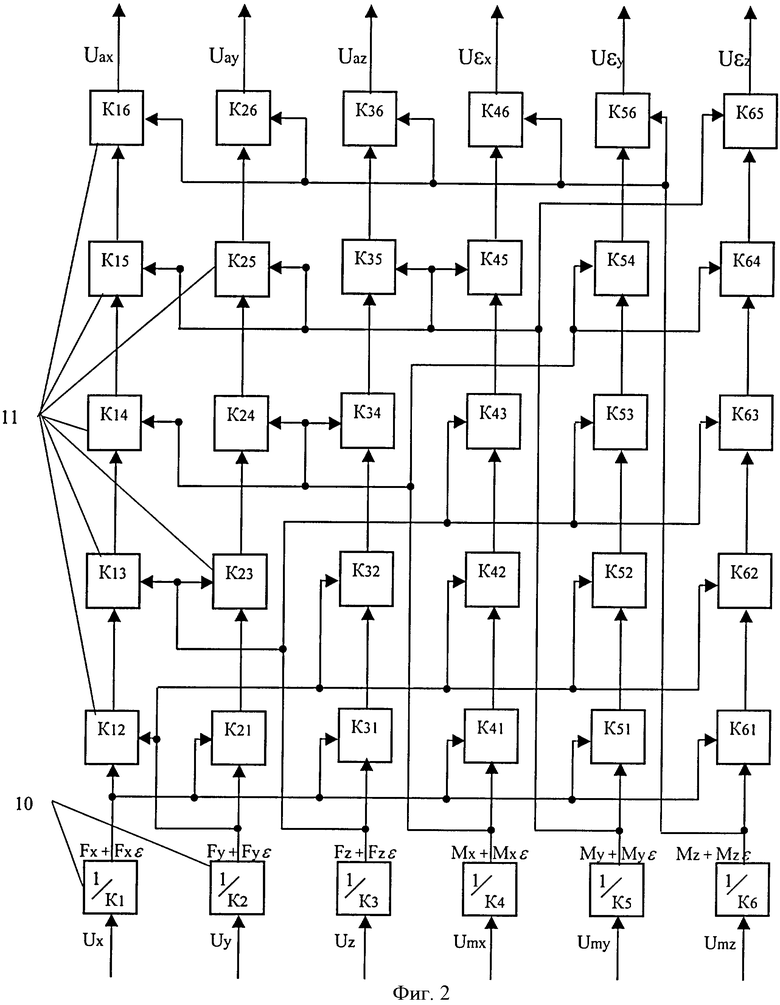
На фиг.2 приведена схема электронной модели многобалочного акселерометра.
Изображенный на фиг.1 многобалочный акселерометр содержит: шесть (не менее) упругих тензометрированных балок, из которых две упругие балки 2 выполнены с большей чувствительностью вдоль оси X, для чего размещены на упругом параллелограмме, расположенном в плоскости, через которую проходит ось X; две упругие балки 3 с большей чувствительностью вдоль оси Y, две упругие балки 4 с большей чувствительностью вдоль оси Z; и упругую балку 5, чувствительную к моменту вокруг оси X, а также механический диполь 1 в виде двух соединенных между собой жесткой тягой разнесенных масс. Балки 2-5 соединены между собой в многокомпонентную балку последовательно так, что каждая из балок имеет наибольшую чувствительность к одной из компонент пары сил, вызванных тремя линейными и тремя угловыми ускорениями общего центра масс физического тела, при этом один конец многокомпонентной балки соединен с механическим диполем 1, ось которой расположена под углом к оси многокомпонентной балки, а второй конец многокомпонентной балки закреплен на физическом теле 6, притом каждая тензометрированная балка содержит тензорезисторы 7, которые объединяются в шесть тензомостов 8 так, что каждый несет информацию в большей степени о i-й компоненте пары сил (или о соответствующей компоненте трехмерного углового или линейного ускорения), выходы тензомостов 8 подключены к электронной модели 9 многобалочного акселерометра.
Изображенная на фиг.2 электронная модель 9 многобалочного акселерометра содержит шесть первых усилителей 10 с фиксированным коэффициентом передачи, входы которых подключены к выходам соответствующих тензомостов 8, и тридцать вторых усилителей 11 с управляемым напряжением коэффициентом передачи, причем каждый из первых шести усилителей 10 и каждые пять из тридцати вторых усилителей 11 объединены в последовательную i-ю цепочку, а управляющие входы вторых усилителей 11, входящих в i-ю цепочку, соединены со входами соответствующих первых усилителей 10, не входящих в i-ю цепочку.
Для получения траектории движения физического тела многобалочный акселерометр 9 дополнительно содержит интегратор по времени 12 выходных сигналов электронной модели.
Устройство работает следующим образом. При ходьбе на месте или двигаясь в пространстве, ОМЦ позвоночника совершает трехмерное движение с неизвестным ускорением, вызывающим трехмерное движение механического диполя 1, который создает пару сил, воздействующих на шестикомпонентную упругую балку, которая изменяет деформацию упругих балок 2-5, измеряемую тензорезисторами 7. Выходной сигнал тензомостов 8 с тензоусилителем соответствующих балок 2-5 несет в большей степени информацию о соответствующей компоненте пары сил. Например, тензомосты 8 балки 2 о Х компоненте (сила Fx), тензомосты 8 балок 3 - о Z компоненте (сила Fy) и о компоненте вокруг оси Y (момент My), тензомосты 8 балок 4 - о Y компоненте и о компоненте вокруг оси Z, тензомосты 8 балки 5 - о компоненте вокруг оси X. Но погрешность этих сигналов из-за перекрестных связей может достигать 50%. С целью уменьшения погрешности введена электронная модель 9. При этом усилители 10 позволяют получить первое приближение компонент пары сил, а усилители 11 уменьшают погрешность определения сил до 0,1%.
Интегрирование сигналов с выходов цепочки последовательно соединенных усилителей 11 с помощью интегратора по времени 12 позволяет установить перемещения ОЦМ во времени и тем самым сделать заключение о тех или иных дефектах в позвоночнике или в суставах ног.
Настраивается электронная модель 9 на стенде, позволяющем задавать три силы и три момента на многобалочный акселерометр. Для этого конец, соединенный с механическим диполем 1, соединяют с кареткой, на которую подвешивают тарировочные грузы, сила действия которых преобразуется кареткой в силы по одной из 3-х ортогональных осей или моменты вокруг одной из этих осей. Оси каретки и оси многобалочного акселерометра совмещаются. Заданием сил или моментов только по одной из осей определяют коэффициент передачи первых шести усилителей 10. Заданием силы по одной из осей и заданием силы по ортогональной ей оси определяют степень влияния перекрестной нагрузки на измеряемый компонент силы, который оценивается коэффициентом kij, индекс i соответствует последовательной цепи усилителей 10 и измеряемой компоненте, индекс j соответствует номеру одного из вторых усилителей 11 и перекрестной компоненте пары сил
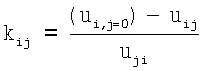 ,
,
где kij - коэффициент передачи вторых 5х6 усилителей;
ui,j=0 - напряжение с выхода одного i-го усилителя из шести первых при загрузке акселерометра только вдоль i оси;
uij - то же напряжение, но при загрузке акселерометра дополнительно вдоль j-й оси;
uji - напряжение с j-го усилителя из 5×6 вторых усилителей при этой загрузке.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОБАЛОЧНЫЙ АКСЕЛЕРОМЕТР - АНАЛИЗАТОР СПЕКТРА МЕХАНИЧЕСКИХ КОЛЕБАНИЙ НА ОСНОВЕ ТЕНЗОРЕЗИСТИВНЫХ ПРЕОБРАЗОВАТЕЛЕЙ | 2008 |
|
RU2387999C1 |
| Тензометрический линейный акселерометр | 2024 |
|
RU2835899C1 |
| Устройство контроля усилий на мышечные группы | 2020 |
|
RU2777942C2 |
| ДВУХБАЛОЧНЫЙ АКСЕЛЕРОМЕТР | 2006 |
|
RU2324192C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПЛОТНОСТИ И УРОВНЯ ЖИДКОСТИ В РЕЗЕРВУАРАХ (ПЛОТНОМЕР-УРОВНЕМЕР) | 2006 |
|
RU2341778C2 |
| ИЗМЕРИТЕЛЬ ДИАГНОСТИЧЕСКИЙ (ВАРИАНТЫ) | 2004 |
|
RU2285446C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2658124C1 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ ПОСТУРАЛЬНЫХ НАРУШЕНИЙ | 2018 |
|
RU2692148C1 |
| МИКРОСИСТЕМНЫЙ АКСЕЛЕРОМЕТР | 2009 |
|
RU2450278C2 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1994 |
|
RU2126161C1 |
Изобретение относится к измерительной технике и может быть использовано в ортопедии для контроля положения позвоночника в трехмерном пространстве. Акселерометр содержит механический диполь в виде двух соединенных между собой тягой разнесенных масс и не менее шести упругих тензометрированных балок, которые соединены между собой в многокомпонентную балку последовательно так, что каждая из балок имеет наибольшую чувствительность к одной из компонент пары сил, вызванных тремя линейными и тремя угловыми ускорениями общего центра масс физического тела. Один конец многокомпонентной балки соединен с выполненной жесткой тягой механического диполя, ось которой расположена под углом к оси многокомпонентной балки, а второй ее конец закреплен на физическом теле. Каждая тензометрированная балка содержит тензорезисторы, объединенные в тензомост, а выходы тензомостов подключены к электронной модели многобалочного акселерометра. Изобретение позволяет измерить одновременно и одноместно три линейных и три угловых ускорения, что позволяет путем интегрирования по времени этих сигналов восстановить траекторию движения общего центра масс позвоночника. 2 н. и 1 з.п. ф-лы, 2 ил.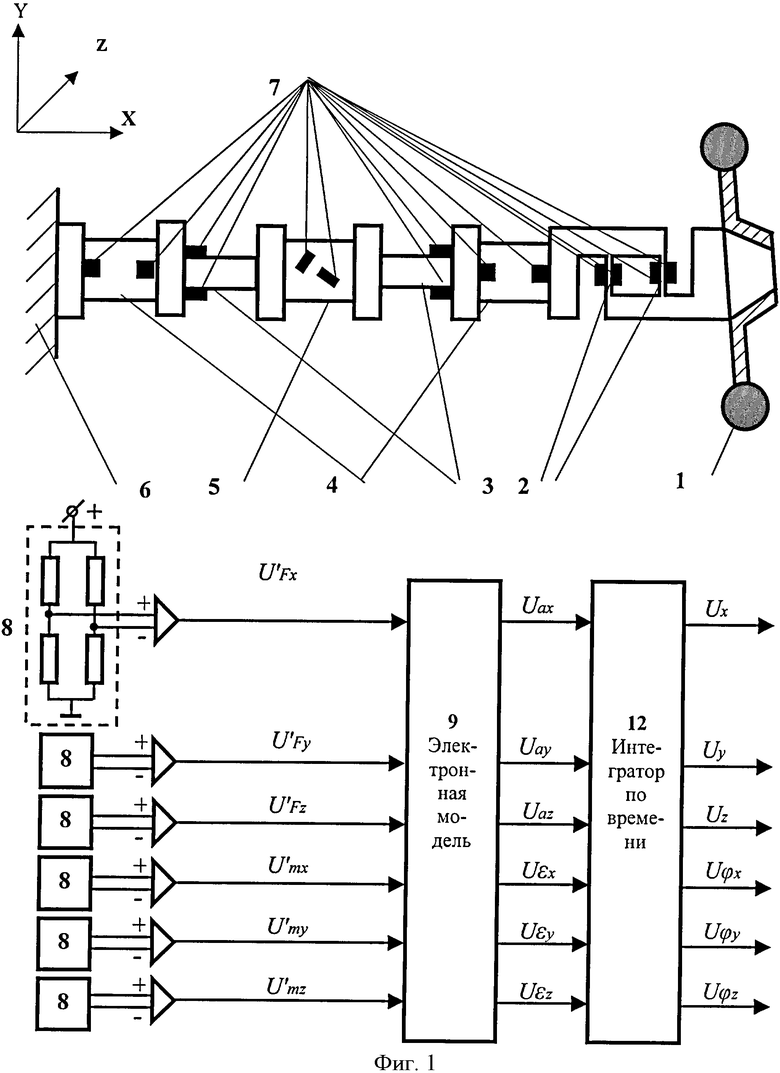
1. Многобалочный акселерометр для измерения ускорений физического тела, содержащий более одной упругой тензометрированной балки и механический диполь в виде двух соединенных между собой тягой разнесенных масс, отличающийся тем, что количество упругих тензометрированных балок не менее шести, они соединены между собой в многокомпонентную балку последовательно так, что каждая из балок имеет наибольшую чувствительность к одной из компонент пары сил, вызванных тремя линейными и тремя угловыми ускорениями общего центра масс физического тела, при этом один конец многокомпонентной балки соединен с выполненной жесткой тягой механического диполя, ось которой расположена под углом к оси многокомпонентной балки, а второй конец многокомпонентной балки закреплен на физическом теле, притом каждая тензометрированная балка содержит тензорезисторы, объединенные в тензомост, а выходы тензомостов подключены к электронной модели многобалочного акселерометра.
2. Многобалочный акселерометр по п.1, отличающийся тем, что содержит интегратор по времени выходных сигналов электронной модели.
3. Электронная модель многобалочного акселерометра, характеризующаяся тем, что она содержит шесть первых усилителей с фиксированным коэффициентом передачи, входы которых подключены к выходам соответствующих тензомостов, и тридцать вторых усилителей с управляемым напряжением коэффициентом передачи, причем каждый из первых шести усилителей и каждые пять из тридцати вторых усилителей объединены в последовательную i-ю цепочку, а управляющие входы вторых усилителей, входящих в i-ю цепочку, соединены со входами соответствующих первых усилителей, не входящих в i-ю цепочку.
| ДВУХБАЛОЧНЫЙ АКСЕЛЕРОМЕТР | 2006 |
|
RU2324192C1 |
| СИСТЕМА КОНТРОЛЯ ПОЛОЖЕНИЯ ПОЗВОНОЧНИКА | 2005 |
|
RU2304920C1 |
| СПОСОБ И ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ СКОРОСТИ ТЕЧЕНИЯ ГАЗА ИЛИ ЖИДКОСТИ В ТРУБАХ | 1926 |
|
SU3536A1 |
| Коленный сустав протеза | 1947 |
|
SU71167A1 |
| JP 8313550 A, 29.11.2006. | |||

