Изобретение относится к измерительной технике и может применяться в интегральных акселерометрах и микрогироскопах с силовой компенсацией.
Известен микросистемный акселерометр [1], содержащий магнитную систему, расположенную на неподвижном основании, возвращающую обмотку, расположенную на подвижном узле, и систему температурных компенсаторов со специально подобранными температурными коэффициентами, встроенных между магнитной системой и корпусом. Заявленная точность достигается без учета нагрузочного резистора, т.е. при выходном сигнале по току.
Недостатком известного устройства является низкая точность измерений при выходе по напряжению, поскольку в выходной сигнал существенную долю погрешности вносит нагрузочный резистор.
Известен микросистемный акселерометр [2], содержащий магнитную систему, расположенную на неподвижном основании, возвращающую обмотку, расположенную на подвижном узле. Известный микросистемный компенсационный акселерометр имеет следующие недостатки:
1 - устройство является склонным к потере устойчивости в связи с применением интегратора и требует газодинамического демпфирования;
2 - устройство имеет большую погрешность нулевого сигнала (до 0.1% от предела измерений при сухом азоте), вызванную релаксацией в газе демпфирования.
Наиболее близким к заявляемому изобретению является компенсационный акселерометр [3], содержащий чувствительный к ускорениям маятник, выполненный в кремниевой пластине и соединенный с ней упругими подвесами, емкостный датчик перемещений, интегратор в прямой цепи и магнитоэлектрическую систему отработки воздействия ускорений.
Известный микросистемный компенсационный акселерометр имеет следующие недостатки:
1 - в статический коэффициент передачи акселерометра входит значение жесткости упругих подвесов, которая зависит от окружающей температуры;
2 - устройство является склонным к потере устойчивости в связи с применением интегратора и требует газодинамического демпфирования;
3 - устройство имеет большую погрешность нулевого сигнала (до 0.1% от предела измерений при сухом азоте), вызванную релаксацией в газе демпфирования.
Задачей, на решение которой направлено изобретение, является повышение точности датчиков с силовой компенсацией за счет выполнения оптимального соотношения между дифференциальной, пропорциональной и интегрирующими составляющими управляющего сигнала отработки и вакуумирования чувствительного элемента.
Этот технический результат достигается тем, что в микросистемный компенсационный акселерометр, содержащий чувствительную массу, выполненную в кремниевой пластине и соединенную с ней упругими подвесами, емкостный датчик перемещений и магнитную систему с возвращающей обмоткой, в соответствии с изобретением в его прямую цепь контура регулирования введено корректирующее устройство в виде пропорционально-интегрально-дифференциального регулятора со следующей передаточной функцией

где α1 - коэффициент передачи регулятора по дифференциальной составляющей, α2 - коэффициент передачи регулятора по пропорциональной составляющей, α3 - коэффициент передачи регулятора по интегрирующей составляющей, α4 - постоянная времени фильтра сглаживания шумов дифференциатора, причем  , α2=1, α4 - период релаксации шумов дифференциатора, J - момент инерции чувствительной массы относительно оси качания, Gу - жесткость упругих подвесов чувствительной массы, s - оператор Лапласа.
, α2=1, α4 - период релаксации шумов дифференциатора, J - момент инерции чувствительной массы относительно оси качания, Gу - жесткость упругих подвесов чувствительной массы, s - оператор Лапласа.
Существенное отличие изобретения заключается в том, что в нем осуществляется оптимальное демпфирование в электрическом контуре и повышение статической точности за счет применения пропорционально-интегрально-дифференциального регулятора и его настройки в соответствии с заявкой.
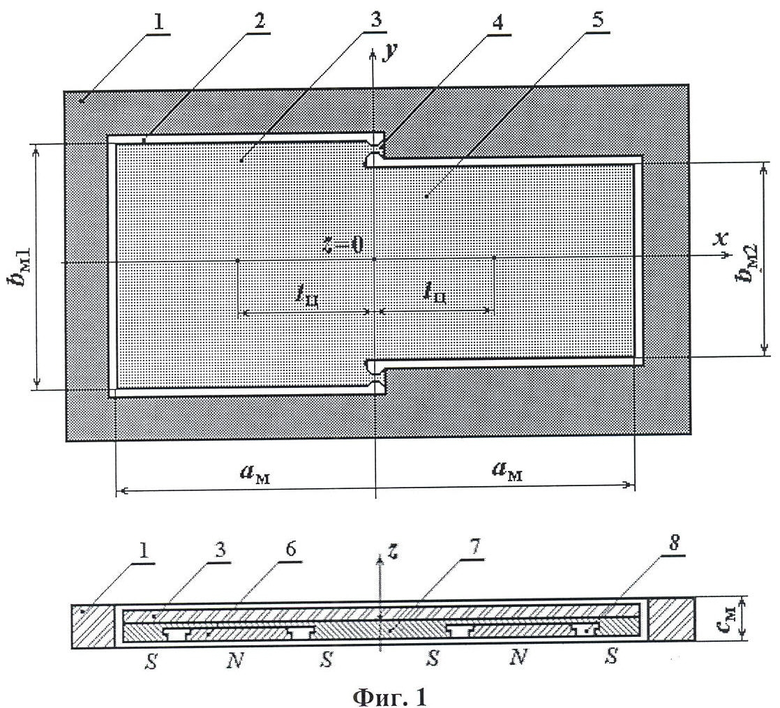
Заявляемое устройство иллюстрируется чертежами, показанными на фигурах 1, 2 и 3, где на фиг.1 показан боковой вид предложенного устройства в разрезе. В кремниевой пластине 1 выполнена посредством анизотропного травления по контуру 2 чувствительная масса (маятник) в виде двух пластин 3 и 5, жестко соединенных по линии качания (ось y). Чувствительная масса посредством упругих подвесов 4 соединена с кремниевой пластиной 1. На нижней поверхности чувствительной массы нанесен слой 7 магнитопровода с вытравленными двумя прямоугольными окнами 8, в которые вставлены постоянные магниты 6. Таким образом, получены между постоянными магнитами и магнитопроводом зазоры, в которых размещаются проводники возвращающей обмотки. Для выравнивания магнитной индукции в зазоре по высоте постоянных магнитов 6 и магнитопровода 7 образованы полюсные наконечники. С другой стороны кремниевой пластины к ней приварена неподвижная обкладка с электродами емкостного датчика перемещений (на фигуре не показана).
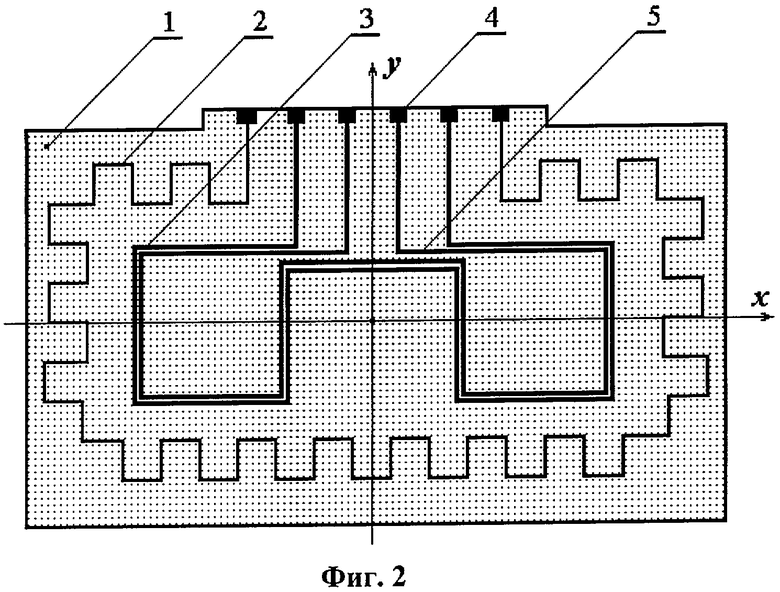
На фиг.2 показано устройство при виде сверху. На пластине-подложке 1 выполнен нагрузочный резистор 2 в виде меандровой дорожки. Своими концами нагрузочный резистор подключен к контактным площадкам 4. Рядом расположены проводники двух одинаковых обмоток 3 и 5. Одна из обмоток 3 является силовой для отработки обратной связи, вторая обмотка 5 предназначена для тестирования микросистемного акселерометра.
На фиг.3 приведена структурная схема заявляемого устройства. На схеме приняты следующие обозначения:  - передаточная функция подвижного узла (маятника); Kчэ=ml - коэффициент передачи чувствительного элемента; m - чувствительная масса; l - рычаг маятника; Kпп=Uопl/h - коэффициент передачи датчика перемещений; h - зазор между поверхностью чувствительной массы и неподвижной обкладкой; Uоп - опорное напряжение; Wкор(s) - передаточная функция корректирующего устройства (функция определена формулой 1); Kус - коэффициент передачи масштабного усилителя;
- передаточная функция подвижного узла (маятника); Kчэ=ml - коэффициент передачи чувствительного элемента; m - чувствительная масса; l - рычаг маятника; Kпп=Uопl/h - коэффициент передачи датчика перемещений; h - зазор между поверхностью чувствительной массы и неподвижной обкладкой; Uоп - опорное напряжение; Wкор(s) - передаточная функция корректирующего устройства (функция определена формулой 1); Kус - коэффициент передачи масштабного усилителя;  - коэффициент передачи силового звена обратной связи; Rн - сопротивление нагрузки; B - магнитная индукция в зазоре; n - число витков в возвращающей обмотке (в заявляемом устройстве один виток); L - длина одного витка.
- коэффициент передачи силового звена обратной связи; Rн - сопротивление нагрузки; B - магнитная индукция в зазоре; n - число витков в возвращающей обмотке (в заявляемом устройстве один виток); L - длина одного витка.
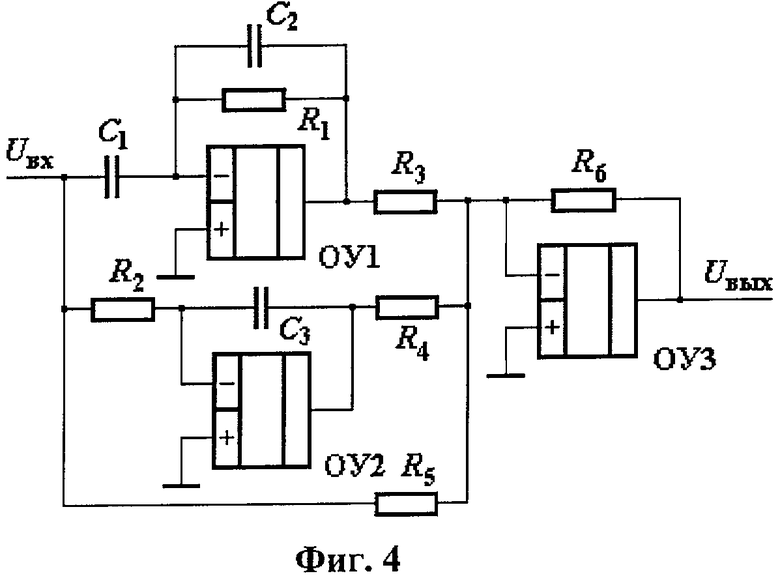
На фиг.4 приведена принципиальная схема реализации корректирующего устройства в соответствии с формулой изобретения. На ОУ1 реализовано первое слагаемое формулы (1) - дифференциатор, где R1C1=α1, и апериодический фильтр R1C2=α4. На ОУ2 реализован интегратор, где R2C3=α3. Коэффициент передачи регулятора по пропорциональной составляющей реализован отношением резисторов R6/R5=α2. Суммирование пропорциональной, интегральной и дифференциальной составляющих осуществляется с помощью ОУ3. Корректирующее устройство своим входом в соответствии со структурной схемой включается к выходу масштабного усилителя, а выходом - ко входу силового звена обратной связи.
Работа заявляемого устройства осуществляется следующим образом. В нейтральном положении, без действия ускорений, чувствительная масса является неподвижной, а на выходе устройства имеет место нулевой сигнал по напряжению. При действии линейного ускорения того или иного знака, чувствительная масса осуществляет угловое движение, емкостный мост разбалансируется и напряжение, усиленное электронным усилителем, поступает на вход пропорционально-интегрально-дифференциального регулятора. В первую очередь вступает в действие дифференцирующая цепочка, ускоряя прохождение сигнала и тем самым в электрическом контуре демпфирование движению чувствительной массы. После этого в действие вступает цепочка пропорционального регулирования, отслеживая положение чувствительной массы. Напряжение сигнала, поступившего в возвращающую обмотку, создает магнитоэлектрическую силу, противодействующую инерционной. При этом чувствительная масса принудительно приводится в исходное состояние. К концу движения сигнал в интегрирующей цепочке имеет максимальное значение, удерживая чувствительную массу в близком к нейтральному положению. При резких скачках чувствительной массы в действие почти одновременно вступают все три составляющие регулирования, тем самым эффективно демпфируется движение.
Из анализа контура регулирования микросистемного акселерометра коэффициент передачи в статике определяется в виде:
Нагрузочный резистор выполнен из одного и того же материала, что и возвращающая обмотка, и его температурные изменения оцениваются в основном изменением длины проводника. На подложке нагрузочный резистор расположен рядом с возвращающей обмоткой, поэтому их отношение является величиной стабильной и вносит в коэффициент чувствительности незначительную погрешность. Что касается величины магнитной индукции B, то современная промышленность может обеспечить нулевой температурный коэффициент постоянным магнитам с применением присадок из редкоземельных металлов, например из сплава «кобальт-самарий-гадалиний». Таким образом, точность заявляемого устройства не зависит от температурных изменений.
Преимуществами заявленного устройства в сравнении с известным являются: 1 - достигнутая статическая точность, определяемая только точностью технологического изготовления элементов устройства; 2 - оптимальное демпфирование, полученное за счет применения и настройки пропорционально-интегрально-дифференциального регулятора в соответствии с изобретением.
Источники информации
1. Вавилов В.Д., Поздяев В.И. Конструирование интегральных датчиков. - М: изд-во МАИ, 1993, - 68 с.
2. Вавилов В.Д. Интегральные датчики. Нижний Новгород: изд-во НГТУ, 2003, С.500.
3. Патент России №2231795, М.кл. G01B 15/08, от 10 декабря 2002 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРАЛЬНЫЙ ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ АКСЕЛЕРОМЕТРА | 2010 |
|
RU2431850C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОСИСТЕМНОГО АКСЕЛЕРОМЕТРА | 2009 |
|
RU2426134C1 |
| ИМПУЛЬСНЫЙ МИКРОСИСТЕМНЫЙ АКСЕЛЕРОМЕТР | 2010 |
|
RU2432578C2 |
| ИНТЕГРАЛЬНЫЙ АКСЕЛЕРОМЕТР | 2002 |
|
RU2231796C2 |
| МИКРОАКСЕЛЕРОМЕТР | 2012 |
|
RU2490650C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ИНТЕГРАЛЬНОГО АКСЕЛЕРОМЕТРА | 2003 |
|
RU2246734C1 |
| УСИЛИТЕЛЬ ОБРАТНОЙ СВЯЗИ ДЛЯ ИНТЕГРАЛЬНЫХ ДАТЧИКОВ | 2010 |
|
RU2431849C1 |
| МИКРОСИСТЕМНЫЙ ГИРОСКОП | 2011 |
|
RU2466354C1 |
| МАГНИТОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ СИЛЫ | 2002 |
|
RU2218575C2 |
| ЕМКОСТНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 2012 |
|
RU2521141C2 |
Изобретение относится к измерительной технике и может быть использовано в интегральных акселерометрах и микрогироскопах с силовой компенсацией. За счет применения пропорционально-интегрально-дифференциального регулятора и выполнения оптимального соотношения настройки между пропорциональной, интегральной и дифференциальной составляющими регулятора достигается повышение точности датчиков с силовой компенсацией. 4 ил.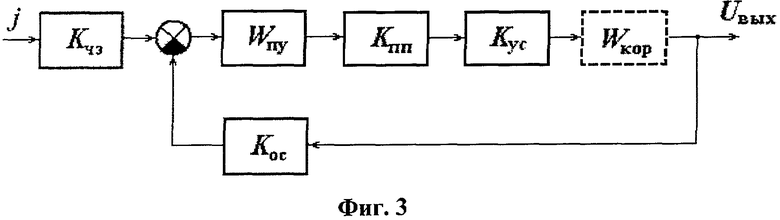
Микросистемный акселерометр, содержащий чувствительную массу, выполненную в кремниевой пластине и соединенную с ней упругими подвесами, прикрепленную к ней неподвижную диэлектрическую обкладку с электродами емкостного датчика перемещений, контур регулирования, содержащий прямую цепь с масштабирующим усилителем и цепь обратной связи, отличающийся тем, что в прямую цепь контура регулирования включено корректирующее устройство в виде пропорционально-интегрально-дифференциального регулятора, содержащего дифференциатор, с которым совмещены фильтр сглаживания шумов и интегратор, со следующей передаточной функцией
 ,
,
где α1 - коэффициент передачи регулятора по дифференциальной составляющей, α2 - коэффициент передачи регулятора по пропорциональной составляющей, α3 - коэффициент передачи регулятора по интегрирующей составляющей, α4 - постоянная времени фильтра сглаживания шумов дифференциатора, причем  , α2=1, α4=τ - период релаксации шумов дифференциатора.
, α2=1, α4=τ - период релаксации шумов дифференциатора.
| ИНТЕГРАЛЬНЫЙ АКСЕЛЕРОМЕТР | 2002 |
|
RU2231796C2 |
| ВАВИЛОВ В.Д | |||
| Интегральные датчики | |||
| - Нижний Новгород: изд-во НГТУ, 2003, с.248-260 | |||
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ИНТЕГРАЛЬНОГО АКСЕЛЕРОМЕТРА | 2002 |
|
RU2231795C1 |
| СПОСОБ ПОВЫШЕНИЯ ВИБРОУСТОЙЧИВОСТИ МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА | 1969 |
|
SU1839872A1 |
| US 5277053 A, 11.01.1994 | |||
| JP 60201262 A, 11.10.1985. | |||

