Изобретение относится к области транспортного машиностроения, в частности к ходовой части и рулевым управлениям колесных транспортных средств.
Известен управляемый колесный модуль с изменяемыми углами установки управляемых колес, содержащий управляемые колеса, установленные на цапфах. Цапфы, в свою очередь, жестко соединены с поворотными кулаками под углом начального развала в поперечной плоскости. Поворотные кулаки шарнирно установлены посредством шкворней на двух рычагах направляющего аппарата подвески, расположенных в вертикальной плоскости и соединенных с рамой транспортного средства. При этом, один из рычагов выполнен с возможностью изменения его длины для изменения угла развала управляемых колес во время движения (Авторское свидетельство СССР АС № 1240675, МПК В 62 D 15/00, 1986 г.).
Недостатком известного управляемого колесного модуля является возможность изменения только лишь угла развала управляемых колес при неизменном угле их схождения. Однако, как показывают результаты специально проведенных исследований, угол схождения и угол развала должны быть взаимоувязаны между собой с целью обеспечения минимальных затрат на качение управляемых колес. Причем эта связь описывается гармоническим законом (Редчиц С.В. и др. Метод определения рационального соотношения углов развала и схождения управляемых колес. // Автомобильная промышленность. - 2000 г. - № 11. - С.15-16).
Наиболее близким по технической сущности к предлагаемому является управляемый колесный модуль с изменяемыми углами установки управляемых колес (Патент РФ № 2186703, МПК В 62 D 17/00, 2002 г.), содержащий управляемые колеса, установленные на цапфах. Цапфы, в свою очередь, жестко соединены с поворотными кулаками под углом начального развала в поперечной плоскости. Поворотные кулаки шарнирно установлены посредством шкворней на балке и соединены посредством двух поворотных рычагов и шарниров с разрезной поперечной тягой. Разрезная поперечная тяга выполнена с возможностью изменения ее длины для изменения угла схождения управляемых колес во время движения. Изменение длины разрезной поперечной тяги осуществляется исполнительным механизмом в зависимости от состояния датчиков положения управляемых колес, вертикальной нагрузки и давления воздуха в шинах.
Недостатком известного управляемого колесного модуля является возможность изменения только лишь угла схождения управляемых колес при неизменном угле их развала.
Технический результат направлен на расширение функциональных возможностей управляемого колесного модуля с изменяемыми углами установки управляемых колес.
Технический результат достигается тем, что управляемый колесный модуль с изменяемыми углами установки управляемых колес, содержащий управляемые колеса, установленные на цапфах, жестко соединенных с поворотными кулаками под углом начального развала в поперечной плоскости транспортного средства, поворотные кулаки, шарнирно установленные посредством шкворней на балке и соединенные между собой посредством поворотных рычагов, шарниров и поперечной тяги, а также исполнительные механизмы, связанные с выходом контроллера, входы которого соединены с датчиками положения управляемых колес, вертикальной нагрузки и давления воздуха в шинах, при этом каждый из поворотных кулаков состоит из вращающейся и поворотной частей, соединенных между собой с возможностью вращения одной относительно другой в продольной плоскости транспортного средства. Поворотная часть шарнирно соединена со шкворнем, а вращающаяся часть жестко - с цапфой и дополнительным поворотным рычагом, который кинематически связан с исполнительным механизмом.
Отличительными признаками от прототипа является то, что каждый из поворотных кулаков состоит из вращающейся и поворотной частей, соединенных между собой с возможностью вращения одной относительно другой в продольной плоскости транспортного средства, при этом поворотная часть шарнирно соединена со шкворнем, а вращающаяся часть жестко - с цапфой и дополнительным поворотным рычагом, который кинематически связан с исполнительным механизмом.
В результате того, что каждый из поворотных кулаков состоит из вращающейся и поворотной частей, соединенных между собой с возможностью вращения одной относительно другой в продольной плоскости транспортного средства, а цапфы жестко соединены с вращающимися частями поворотных кулаков под углом начального развала в поперечной плоскости, появляется возможность изменения одновременно и угла развала и угла схождения управляемых колес путем воздействия контроллера на дополнительные поворотные рычаги, жестко связанные с вращающимися частями поворотных кулаков, посредством исполнительных механизмов, таким образом, расширяются функциональные возможности управляемого колесного модуля. При этом отпадает необходимость использования разрезной поперечной тяги для изменения угла схождения управляемых колес, что приводит к повышению жесткости рулевого привода и, в конечном итоге, благоприятно сказывается на управляемости колесного транспортного средства.
На чертеже представлена схема управляемого колесного модуля с изменяемыми углами установки управляемых колес.
Управляемый колесный модуль с изменяемыми углами установки управляемых колес содержит управляемые колеса 1, установленные на цапфах 2. Цапфы 2 жестко соединены с поворотными кулаками под углом начального развала в поперечной плоскости OYZ. Поворотные кулаки шарнирно установлены посредством шкворней 3 на балке 4 и соединены между собой посредством поворотных рычагов 5, шарниров 6 и поперечной тяги 7. Каждый из поворотных кулаков состоит из вращающейся 8 и поворотной 9 частей, соединенных между собой с возможностью вращения одной относительно другой в продольной плоскости транспортного средства OXZ. При этом поворотная часть 9 шарнирно соединена со шкворнем 3, а вращающаяся часть 8 жестко - с цапфой 2 и дополнительным поворотным рычагом 10, который кинематически связан с исполнительным механизмом 11, выполненным, например, в виде электродвигателя, гидравлического или пневматического силового цилиндров. Исполнительные механизмы 11, в свою очередь, связаны с выходом контроллера 12, входы которого соединены с датчиками положения управляемых колес 13, вертикальной нагрузки 14 и давления воздуха в шинах 15, которые могут быть выполнены, например, потенциометрическими.
Управляемый колесный модуль с изменяемыми углами установки управляемых колес работает следующим образом.
При движении колесного транспортного средства сигналы с датчиков положения управляемых колес 13, вертикальной нагрузки 14 и давления воздуха в шинах 15 поступают в контроллер 12, который определяет наиболее рациональное соотношение углов установки управляемых колес 1 и подает соответствующий сигнал на их изменение исполнительным механизмом 11. Исполнительные механизмы 11, воздействуя на дополнительные поворотные рычаги 10, проворачивают вращающиеся части поворотных кулаков 8 относительно поворотных частей 9 в продольной плоскости транспортного средства OXZ. При этом цапфы 2, жестко соединенные с вращающимися частями поворотных кулаков 8 под углом начального развала впоперечной плоскости OYZ, изменят свое пространственное положение, описав дугу окружности. В результате углы установки управляемых колес 1, установленных на цапфах 2, изменятся одновременно. Причем если угол схождения увеличится, то угол развала будет уменьшен и наоборот.
Таким образом, за счет одновременного изменения обоих углов установки управляемых колес, расширяются функциональные возможности управляемого колесного модуля.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЯЕМЫЙ КОЛЕСНЫЙ МОДУЛЬ С ИЗМЕНЯЕМЫМИ УГЛАМИ УСТАНОВКИ УПРАВЛЯЕМЫХ КОЛЕС | 2000 |
|
RU2211780C2 |
| УПРАВЛЯЕМЫЙ КОЛЕСНЫЙ МОДУЛЬ С ИЗМЕНЯЕМЫМИ УГЛАМИ УСТАНОВКИ УПРАВЛЯЕМЫХ КОЛЕС | 2004 |
|
RU2259296C1 |
| УПРАВЛЯЕМЫЙ КОЛЕСНЫЙ МОДУЛЬ С ИЗМЕНЯЕМЫМИ УГЛАМИ УСТАНОВКИ УПРАВЛЯЕМЫХ КОЛЕС | 2000 |
|
RU2186703C2 |
| УСТРОЙСТВО НАКЛОНА УПРАВЛЯЕМЫХ КОЛЕС | 2004 |
|
RU2264318C1 |
| Передний управляемый мост с изменяемыми углами установки колес транспортного средства | 1980 |
|
SU927614A1 |
| Управляемый мост транспортного средства | 1974 |
|
SU1068320A1 |
| Крутосклонный трактор со всеми управляемыми колесами | 1975 |
|
SU648461A1 |
| Управляемый ведущий мост транспортного средства | 1988 |
|
SU1525066A1 |
| ПЕРЕДНИЙ ВЕДУЩИЙ МОСТ ТРАНСПОРТНОГО СРЕДСТВА С РЕГУЛИРУЕМЫМИ УГЛАМИ УСТАНОВКИ УПРАВЛЯЕМЫХ КОЛЕС | 1997 |
|
RU2134645C1 |
| УПРАВЛЯЕМЫЙ МОСТ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА, ПРЕИМУЩЕСТВЕННО АВТОПОГРУЗЧИКА | 1997 |
|
RU2118267C1 |
Изобретение относится к области транспортного машиностроения, в частности к ходовой части и рулевым управлениям колесных транспортных средств. Управляемый колесный модуль с изменяемыми углами установки управляемых колес содержит управляемые колеса, установленные на цапфах, жестко соединенных с поворотными кулаками под углом начального развала в поперечной плоскости транспортного средства, поворотные кулаки, шарнирно установленные посредством шкворней на балке и соединенные между собой посредством поворотных рычагов, шарниров и поперечной тяги, а также исполнительные механизмы, связанные с выходом контроллера, входы которого соединены с датчиками положения управляемых колес, вертикальной нагрузки и давления воздуха в шинах. Каждый из поворотных кулаков состоит из вращающейся и поворотной частей, соединенных между собой с возможностью вращения одной относительно другой в продольной плоскости транспортного средства. Поворотная часть шарнирно соединена со шкворнем, а вращающаяся часть жестко - с цапфой и дополнительным поворотным рычагом, который кинематически связан с исполнительным механизмом. Технический результат заключается в расширении функциональных возможностей. 1 ил.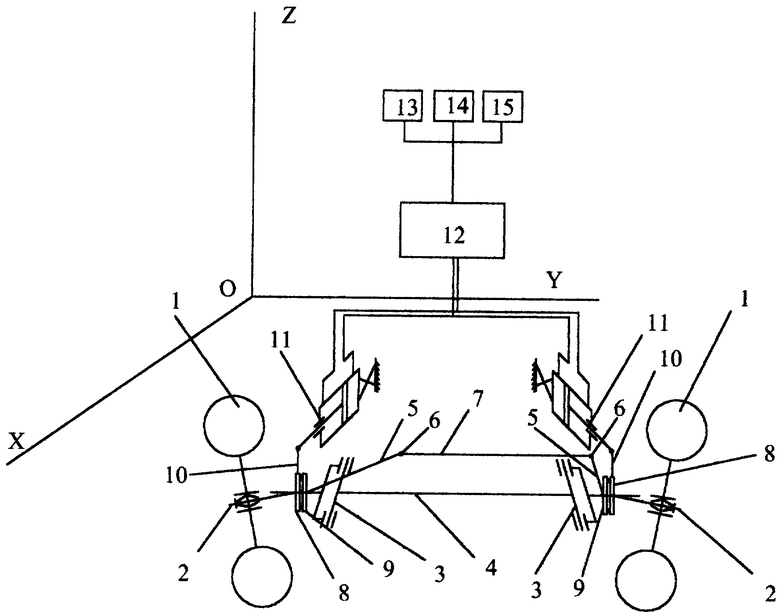
Управляемый колесный модуль с изменяемыми углами установки управляемых колес, содержащий управляемые колеса, установленные на цапфах, жестко соединенных с поворотными кулаками под углом начального развала в поперечной плоскости транспортного средства, поворотные кулаки, шарнирно установленные посредством шкворней на балке и соединенные между собой посредством поворотных рычагов, шарниров и поперечной тяги, а также исполнительные механизмы, связанные с выходом контроллера, входы которого соединены с датчиками положения управляемых колес, вертикальной нагрузки и давления воздуха в шинах, отличающийся тем, что каждый из поворотных кулаков состоит из вращающейся и поворотной частей, соединенных между собой с возможностью вращения одной относительно другой в продольной плоскости транспортного средства, при этом поворотная часть шарнирно соединена со шкворнем, а вращающаяся часть - жестко с цапфой и дополнительным поворотным рычагом, который кинематически связан с исполнительным механизмом.
| УПРАВЛЯЕМЫЙ КОЛЕСНЫЙ МОДУЛЬ С ИЗМЕНЯЕМЫМИ УГЛАМИ УСТАНОВКИ УПРАВЛЯЕМЫХ КОЛЕС | 2000 |
|
RU2186703C2 |
| US 4795187 А, 03.01.1989 | |||
| US 4616845 А, 14.10.1986 | |||
| US 4552379 А, 12.11.1985. | |||

