Настоящее изобретение относится к способу управления турбореактивным реверсором тяги с использованием по меньшей мере одной подвижной крышки, установленной с возможностью перемещения посредством по меньшей мере одного электрического двигателя. Настоящее изобретение также относится к реверсору тяги, используемому для такого способа управления.
Назначение реверсора тяги при посадке самолета заключается в улучшении способности самолета к торможению путем перенаправления вперед по меньшей мере части тяги, создаваемой турбореактивным двигателем. На этом этапе реверсор перекрывает реактивное сопло и направляет реактивную струю, выпускаемую двигателем, в направлении передней части гондолы, тем самым создавая реверс тяги, добавляемый к торможению колес самолета.
Средства, используемые для перенаправления подобным способом реактивной струи, меняются в зависимости от типа реверсора. Однако во всех случаях конструкция реверсора содержит подвижные крышки, которые можно перемещать между, с одной стороны, развернутым положением, в котором они раскрывают внутри гондолы проход, и, с другой стороны, втянутым положением, в котором они закрывают этот проход. Эти подвижные крышки также могут выполнять и отклоняющую функцию или могут просто активизировать другие отклоняющие средства.
В решетчатых реверсорах тяги, например, подвижные крышки скользят вдоль направляющих так, чтобы при удалении назад на этапе открывания они раскрывали решетки отклоняющих лопастей, помещенных в пределах толщины гондолы. Система связующих тяг соединяет эту подвижную крышку с запирающими створками, которые развертываются в канале реактивного сопла и перекрывают прямой выпуск реактивной струи. В реверсорах тяги створчатого типа, в отличие, каждая подвижная крышка установлена с возможностью поворота таким образом, чтобы препятствовать прохождению реактивной струи и отклонять ее, и следовательно, активна в этом перенаправлении.
Вообще, подвижные крышки приводятся в действие посредством гидро- или пневмоприводов, требующих транспортной сети для находящейся под давлением текучей среды. Эту находящуюся под давлением текучую среду традиционно получают либо стравливанием воздуха из турбореактивного двигателя в случае пневматической системы, либо выпуском жидкости из гидравлической цепи самолета. Такие системы требуют значительного ухода, поскольку малейшая утечка в гидравлической или пневматической цепи, которую может быть трудно выявить, несет риск появления серьезных последствий как для реверсора, так и для других частей гондолы. Кроме того, из-за нехватки места, доступного в передней части реверсора, настройка и защита такой цепи являются исключительно сложными операциями, требующими значительного пространства.
Другим недостатком гидравлических и пневматических систем является то, что приводы или двигатель всегда производят максимальную мощность, на которую они сконструированы и которая должна соответствовать мощности, необходимой для открытия или закрытия реверсора при посадке или взлете в условиях большой нагрузки. Более точно, такими условиями, в частности, являются открытие (или разворачивание) в случае прерванного взлета и закрытие (или втягивание) в случае прерванной посадки, план действий при которых требует значительно большей движущей силы, чем требуется при нормальных условиях, чтобы преодолеть давления, связанные с очень высокой скоростью турбореактивного двигателя. Проблема, в частности, заключается в том, чтобы иметь возможность обеспечить достаточную мощность для того, чтобы, с одной стороны, во время открывания можно было преодолеть сильное придавливание, созданное прямой реактивной струей, препятствующее началу открывания подвижной крышки и отделению ее герметизирующего затвора, и, с другой стороны, при закрывании можно было преодолеть более высокие противодействующие аэродинамические силы. Из соображений безопасности такие рабочие сценарии, хоть и редко возникающие, конечно же необходимо учесть.
Поскольку мощность, производимая приводами, всегда является максимальной мощностью, необходимой, чтобы гарантировать, что реверсор работает в данных, связанных с высокими нагрузками сценариях, нагрузки, воздействующие на конструкции и оборудование, всегда являются наибольшими нагрузками, приводящими поэтому к преждевременному усталостному износу различных компонентов реверсора. Кроме того, в случае застопоривания компонентов реверсора динамические и статические нагрузки также станут очень высокими.
Например, если защелки, которые запирают реверсор, заклинит, динамические нагрузки из-за удара подвижной крышки в движении будут весьма значительными. Необходимо сконструировать защелки таким образом, чтобы они были способны выдерживать такой удар при работающем на полной скорости и полной мощности двигателе (или системе). Таким образом, защелка становится технически очень сложной в ущерб общей массе. Такую же последовательность доводов можно применять и к другим компонентам реверсора.
Более точно, при использовании пневматической или гидравлической системы вероятность удара, происходящего на полной мощности, равняется вероятности заклинивания реверсора, поскольку полная мощность вырабатывается в каждый момент ее применения. Согласно стандартам изготовителя заклинивание реверсора является, следовательно, экстремальным случаем, вероятность возникновения которого слишком высока, чтобы быть способным допускать пластическую деформацию компонентов. Решение, принятое во избежание подобных деформаций, заключается в том, что компоненты реверсора тяги оказываются технически сложными за счет общей массы.
Здесь необходимо отметить, что масса оборудования является важнейшим аспектом в авиационном проектировании и что реверсор тяги составляет наиболее тяжелый сборочный узел гондолы. Следовательно, предпочтительно снизить эту массу насколько возможно, в то же время обеспечивая соответствие стандартам безопасности и надежности.
Чтобы компенсировать недостатки, связанные с применением пневматических и гидравлических систем, производители реверсоров тяги прибегли к их замене и оборудовали свои реверсоры, насколько возможно, электромеханическими приводами, более легкими и надежными. Подобный такому реверсор описан в документе ЕР 0843089. Однако проблема сил, воздействующих на конструкцию, не полностью разрешена, поскольку все еще необходимо, чтобы электрические двигатели были способны запускать реверсор при связанных с высокими нагрузками сценариях.
Цель настоящего изобретения заключается в преодолении вышеупомянутых недостатков и, в частности, в оптимизации экономии массы, возможной благодаря использованию электромеханических приводов и в увеличении срока службы реверсора тяги, и по этим причинам настоящее изобретение состоит в способе управления открытием или закрытием турбореактивного реверсора тяги, применяя по меньшей мере одну подвижную крышку, установленную с возможностью перемещения посредством по меньшей мере одного электрического двигателя, характеризующемся тем, что он содержит для фазы открывания и/или закрывания следующие шаги, направленные на:
- анализ по меньшей мере одного параметра, характеризующего давление в потоке турбореактивного двигателя,
- выполнение последовательности операций, в которой рабочие параметры электрического двигателя приводят в соответствие рабочей ситуации.
Таким образом, когда реверсор тяги необходимо активизировать в ситуации, в которой необходимо предусмотреть значительные силы, иначе говоря в случае, например, прерванного взлета или прерванной посадки, анализ параметра, характеризующего давление в потоке турбореактивного двигателя, выражающего скорость срабатывания и силы, которые необходимо приложить для открытия или закрытия реверсора, позволяет выявить появление одной из этих ситуаций и настроить параметры упомянутого реверсора соответственно с последовательностью операций, выполняемых при открытии или закрытии. Как дополнительный эффект анализ характеризующего параметра таким образом позволяет не выполнять без надобности последовательность операций с рабочими параметрами электрического двигателя, не нужными в случае нормальной работы. При этом рабочие параметры, предназначенные для сценариев, требующих большие нагрузки, больше не применяют в обычном режиме, но зарезервированы только для сценариев, связанных с большими нагрузками. Вероятность удара, происходящего при высокой мощности двигателя, благодаря способу согласно настоящему изобретению значительно снижается, поскольку этот случай может возникнуть только, когда это необходимо, при условии, что характеризующий параметр показывает значение, соответствующее этой высокой мощности. Возникновение удара при полной мощности поэтому больше не является чрезвычайным случаем, поскольку вероятность заклинивания реверсора благодаря способу согласно настоящему изобретению помножена на вероятность работы реверсора в условиях большой нагрузки и, следовательно, значительно снижена. Согласно стандартам изготовителя это - чрезвычайный случай, допускающий определенную пластическую деформацию компонентов, позволяя уменьшить некоторые компоненты.
Предпочтительно получать анализируемый характеризующий параметр из частоты вращения вала компрессора низкого давления турбореактивного двигателя. Характеризующий параметр может в зависимости от типа турбореактивного двигателя являться непосредственно частотой вращения самого вала или его пониженной скоростью, если между валом компрессора и вентилятором установлен редуктор. В частности, лишь частота вращения, действительно переданная вентилятору, является параметром, характеризующим давление в потоке турбореактивного двигателя. Это значение можно легко получить, применяя электронную систему, контролирующую турбореактивный двигатель и известную под англоязычным акронимом FADEC, обозначающим полностью автономный электроцифровой контроллер двигателя (ПАЦКД). Конечно же, можно использовать и другие значения, например давление воздуха в турбореактивном двигателе. Также возможно анализировать несколько характеризующих параметров, таких как, например, пониженная скорость вращения вала компрессора низкого давления, скорректированная значениями температуры окружающей среды и давлением окружающей среды, чтобы получить более точный и более надежный анализ.
Предпочтительно, чтобы исполняемую последовательность выбирали из по меньшей мере двух предварительно заданных последовательностей, соответствующих условию, в котором находится турбореактивный двигатель, - низкой скорости и высокой скорости соответственно. Низкая скорость турбореактивного двигателя означает скорости работы турбореактивного двигателя во время стандартного разворачивания и втягивания реверсора и ситуации управления реверсором в ходе технического обслуживания, с неработающим турбореактивным двигателем. Эта скорость, как правило, соответствует частотам вращения вала компрессора низкого давления на приблизительно от 30 до 40% меньшим значения максимальной скорости, установленной производителем турбореактивного двигателя. Это значение не является абсолютным соотношением и может изменяться в зависимости от характеристик турбореактивного двигателя и в зависимости от активных нагрузок, действующих на подвижные крышки при их перемещении. Наоборот, частоты вращения вала компрессора низкого давления, превышающие максимальную скорость на приблизительно от 30 до 40%, соответствуют высокой скорости. Следует отметить, что данное разделяющее значение, отделяющее высокую и низкую скорости, не обязательно одинаково для этапов открытия и для этапов закрытия.
Действительно, как объяснялось ранее, при открытии проблема, по существу, будет заключаться в подаче мощности, необходимой для отделения подвижной крышки, тогда как при закрытии проблемой скорее будет преодоление внешнего воздушного потока, препятствующего закрытию подвижной крышки. Изменения этих двух ограничений, как изменения скорости турбореактивного двигателя, не являются одинаковыми и, следовательно, будет предпочтительно предусмотреть различные разделяющие значения низкой и высокой скорости для открытия и для закрытия.
Предпочтительно, чтобы электрический двигатель, когда выполняется последовательность операций, развивал вращающий момент, меньший или равный максимальному допустимому значению. Таким образом, вращающий момент, развиваемый электрическим двигателем для приведения в действие подвижных крышек, выверяется и может быть ограничен вращающим моментом, которого как раз достаточно для перемещения подвижных крышек в данном состоянии скорости турбореактивного двигателя. В отличие от уже описанных пневматических или гидравлических систем мощность электрического двигателя зависит от тока, подаваемого на этот двигатель, и может быть отрегулирована так, чтобы двигатель развивал его максимальную мощность только в случае необходимости. Ограничивая применение большого вращающего момента только случаями, когда нагрузки высоки, вероятность того, что реверсор должен будет выдерживать большие статические нагрузки в случае заклинивания, будет значительно снижена, поскольку она умножается на вероятность нахождения его в сценарии, когда большие нагрузки существуют. Следовательно, снижаются износ и усталость компонентов реверсора и тем самым соответственно увеличиваются прочность и срок службы реверсора.
Предпочтительно, когда значение параметра, характеризующего скорость турбореактивного двигателя, находится в пределах предварительно заданного диапазона, максимальное допустимое значение вращающего момента, развиваемого электрическим двигателем, определяют, используя функцию, подобную значению характеризующего параметра. Этим способом можно обеспечить по меньшей мере одну последовательность операций, которая будет выполняться для промежуточных скоростей работы турбореактивного двигателя. Это позволяет точно настроить параметры последовательности операций.
Еще более предпочтительно, чтобы последовательность операций, выполняемых для турбореактивного двигателя, работающего на низкой скорости, содержала контрольный шаг, предназначенный для проверки рабочего состояния (вращения) электрического двигателя, который в случае, когда последний не работает (не вращается), вызовет исполнение последовательности операций, предназначенной для работы турбореактивного двигателя на высокой скорости. Шаг, подобный этому, особо полезен, если анализ параметра, характеризующего скорость турбореактивного двигателя, невозможен или ошибочен и выполняемая последовательность является последовательностью, предназначенной для турбореактивного двигателя, работающего на низкой скорости. В этом случае, если данная последовательность признается неподходящей, будет выполняться последовательность, предназначенная для сценариев в условиях высокой нагрузки.
Также предпочтительно, чтобы скорость двигателя была ограничена по меньшей мере в начале выполнения последовательности операций. Ограничивая скорость, ограничивают динамические нагрузки и инерционные эффекты, которые могут воздействовать на конструкцию реверса в случае его заклинивания. Как только справились с чувствительными компонентами, подобными защелкам, можно установить второе более высокое исходное значение скорости.
Предпочтительно, чтобы применяемая последовательность операций содержала по меньшей мере один шаг проверки и настройки скорости.
Также предпочтительно, чтобы последовательность операций содержала контур управления, предназначенный для проверки рабочего состояния электрического двигателя и способного выключить этот электрический двигатель. Таким образом, если будет выявлено какое-либо заклинивание, электрический двигатель может быть остановлен или может удерживаться в режиме ожидания.
Предпочтительно предусмотреть запуск последовательности операций по умолчанию при невозможности проанализировать характеризующий параметр. Эта выполняемая по умолчанию последовательность может быть последовательностью, идентичной одной из предложенных последовательностей операций, или может являться специальной последовательностью.
В настоящем изобретении также предложен реверсор тяги, содержащий по меньшей мере одну подвижную крышку, установленную с возможностью перемещения с помощью по меньшей мере одного электрического двигателя, характеризующийся тем, что электрическим двигателем управляют посредством по меньшей мере одного управляющего интерфейса, имеющего возможность последовательно анализировать по меньшей мере один параметр, характеризующий скорость турбореактивного двигателя, и вырабатывать по меньшей мере одно подходящее базовое рабочее значение.
Предпочтительно, чтобы управляющий интерфейс был соединен с блоком управления турбореактивным двигателем, выдающим характеризующий параметр.
Предпочтительно в качестве электрического двигателя использовать вентильный синхронный электродвигатель. Такой электродвигатель исключительно пригоден для управления вращающим моментом и/или скоростью. Кроме того, можно легко измерить частоту вращения и вращающий момент.
Также предпочтительно, чтобы электрический двигатель имел возможность регулирования вращающего момента на постоянной скорости. Предпочтительно, чтобы интерфейс содержал средства регулировки, предназначенные для настройки вращающего момента, вырабатываемого электрическим двигателем.
Предпочтительно, чтобы управляющий интерфейс был способен принимать базовое значение скорости и преобразовывать его в управляющий сигнал вращающего момента, выдаваемый электрическому двигателю. Предпочтительно, чтобы управляющий интерфейс содержал средства регулировки, предназначенные для настройки скорости электрического двигателя.
Реализацию настоящего изобретения будет проще понять с помощью подробного описания, приводимого далее со ссылками на прилагаемые чертежи, в которых:
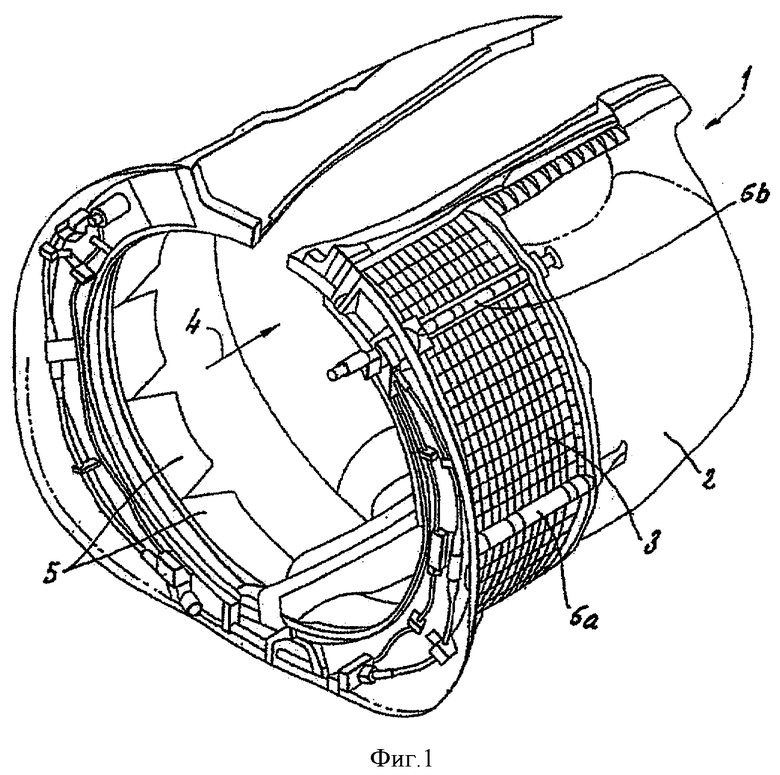
На Фиг.1 схематически представлено частично в разрезе аксонометрическое изображение гондолы, содержащей решетчатый реверсор тяги.
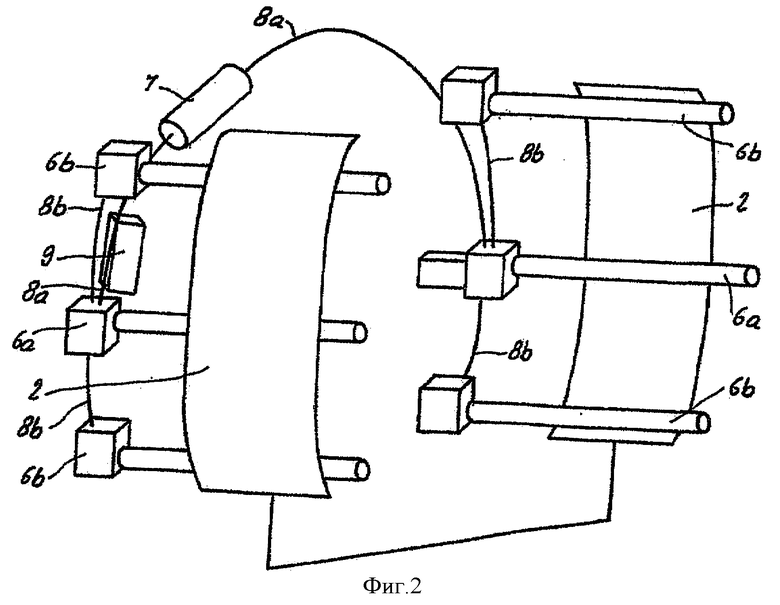
На Фиг.2 схематически представлены подвижные крышки и их системы привода.
На Фиг.3 приведена схема, отображающая шаги операций способа управления согласно настоящему изобретению для открытия реверсора тяги.
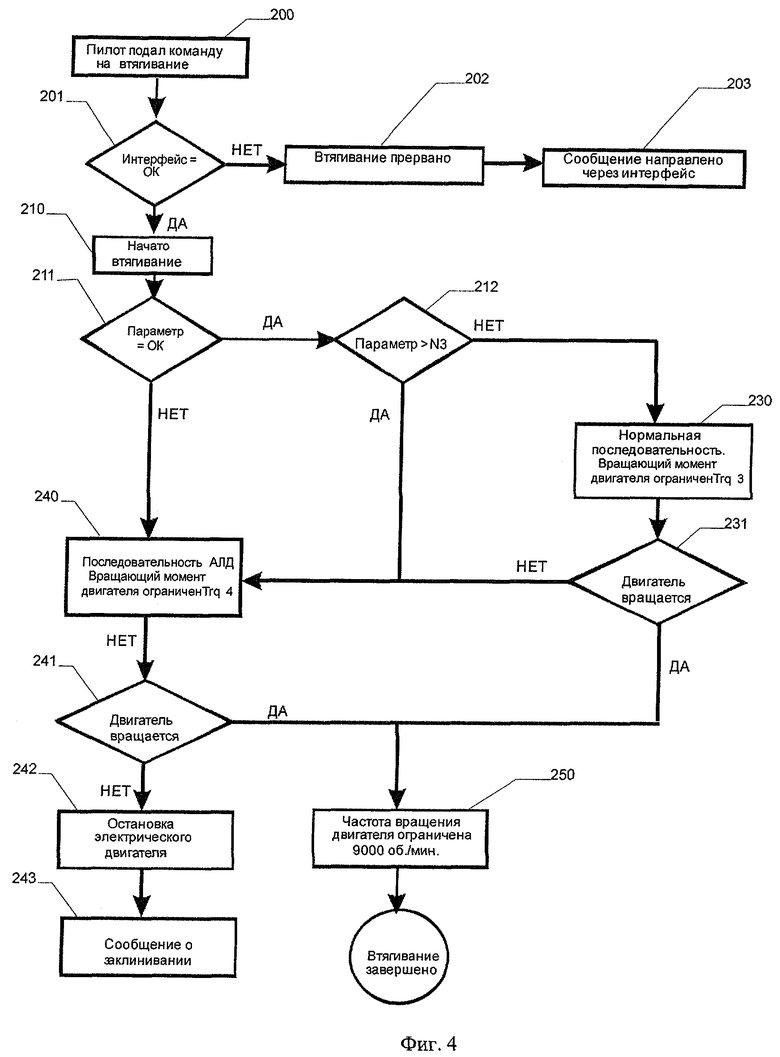
На Фиг.4 приведена схема, отображающая шаги операций способа управления согласно настоящему изобретению для закрытия реверсора тяги.
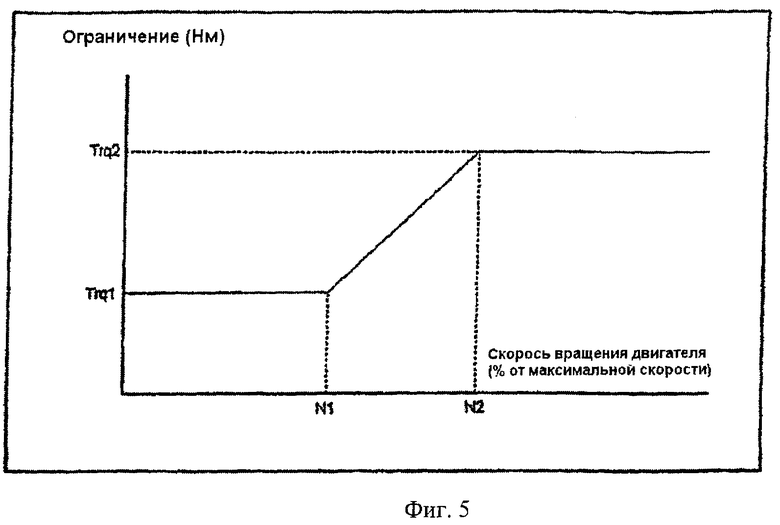
На Фиг.5 представлен график, отображающий максимально допустимый вращающий момент, разрешенный на этапе открытия реверсора, как функция от скорости турбореактивного двигателя.
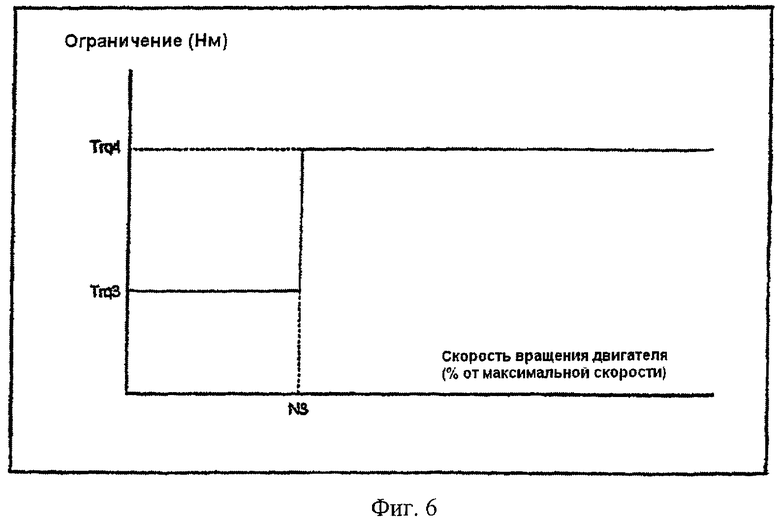
На Фиг.6 представлен график, отображающий максимально допустимый вращающий момент, разрешенный на этапе закрытия реверсора, как функция от скорости турбореактивного двигателя.
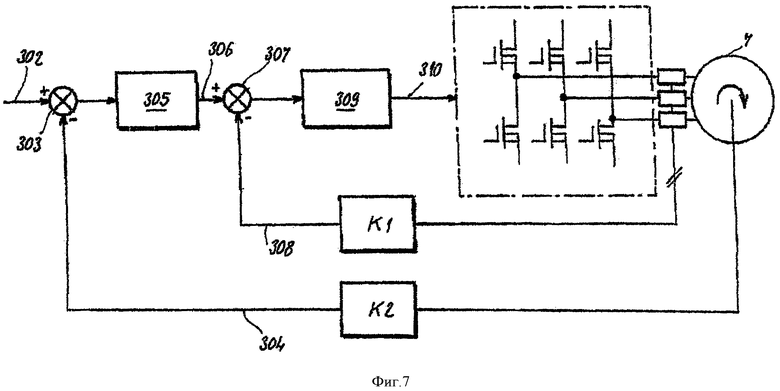
На Фиг.7 представлено упрощенное изображение конструкции управляющего интерфейса, которым оборудован реверсор согласно настоящему изобретению.
Прежде чем привести подробное описание воплощений настоящего изобретения, важно подчеркнуть, что настоящее изобретение не ограничено каким-либо конкретным типом реверсора. Хотя оно и проиллюстрировано с применением решетчатого реверсора, его можно выполнить, применяя реверсоры тяги других конструкций, в частности створчатого типа.
На Фиг.1 представлено схематическое изображение гондолы, содержащей реверсор 1 тяги. Турбореактивный двигатель не показан. Конструкция такого реверсора 1 тяги содержит две полукруглые подвижные крышки 2, установленные с возможностью скольжения для открытия решеток 3 отклоняющих лопастей, помещенных между подвижными крышками 2 и створом для прохода воздушного потока 4, который следует отклонить. Запирающие створки 5 размещают внутри конструкции таким образом, чтобы они могли поворачиваться и перемещаться из положения, в котором они не препятствуют проходу воздушного потока 4, в положение, в котором они блокируют этот проход. Чтобы координировать открытие подвижных крышек 2 с закрывающим положением запирающих створок 5, последние механически соединены с подвижной крышкой 2 с помощью шарниров и со стационарной конструкцией системой связующих тяг (не показана).
Перемещение подвижных крышек 2 вдоль наружной поверхности конструкции выполняется посредством набора приводов 6а, 6b, установленных на передней части, внутри которой размещены электрический двигатель 7 и гибкие передаточные валы 8а, 8b, соединенные с приводами 6а, 6b соответственно, чтобы приводить их в действие.
Отдельно система для приведения в действие подвижных крышек 2 изображена на Фиг.2. Каждую подвижную крышку 2 можно перемещать посредством трех приводов 6а, 6b, включающих центральный привод 6а и два дополнительных привода 6b, приводимых в действие с помощью одного электрического двигателя 7, соединенного с управляющим интерфейсом 9. Мощность, вырабатываемая электрическим двигателем 7, в первую очередь, подается на центральные приводы 6а через два гибких передаточных вала 8а и затем на дополнительные приводы 6b посредством гибких передаточных валов 8b.
На Фиг.3 приведена схема, показывающая шаги способа согласно настоящему изобретению для открытия реверсора 1 тяги.
В первую очередь, пилотом подается команда 100 на развертывание реверсора тяги. После этой команды следует контрольный шаг 101, который либо разрешает, либо не разрешает развертывание в зависимости от состояния управляющего интерфейса 9. Если ответ от управляющего интерфейса 9 является отрицательным, то этот управляющий интерфейс прерывает 102 развертывание и посылает сообщение 103 через управляющий интерфейс 9 на панель управления. Следует заметить, что производители некоторых самолетов, из соображений безопасности, требуют, чтобы попытка произвести развертывание или втягивание была произведена даже в том случае, когда система не разрешает открытие. В этом случае контрольный шаг 101 опускается и заменяется одним или более шагами, соответствующими этому требованию.
Положительный ответ от управляющего интерфейса 9 инициирует начало развертывания 110.
В первую очередь, контрольный интерфейс 9 анализирует параметр, характеризующий скорость работы турбореактивного двигателя, полученный от контроллера ПАЦКД (не показан), которым оборудован турбореактивный двигатель. Этот шаг анализа включает первый подшаг 111, второй подшаг 112 и третий подшаг 113.
Первый подшаг 111 заключается в тестировании доступности характеризующего параметра. Если его значение получить нельзя, то применяется выполняемая по умолчанию последовательность операций. Эта выполняемая по умолчанию последовательность операций может совпадать или может отличаться от существующей последовательности операций, используемой для определенных значений характеризующего параметра. В данном конкретном случае эта выполняемая по умолчанию последовательность операций идентична последовательности, предназначенной для связанных с высокими нагрузками сценариев, описание которой будет приведено далее.
Второй подшаг 112 и третий подшаг 113 используют значение характеризующего параметра. В примере это значение будет выражено процентом от максимальной скорости турбореактивного двигателя, заданной производителем. В этом примере существуют три последовательности операций, включающие стандартную последовательность 130 операций, предназначенную для применения, когда значение характеризующего параметра меньше N1% от значения, соответствующего максимальной скорости турбореактивного двигателя, последовательность 140 операций для связанных с высокими нагрузками сценариев (в данном примере прерванный взлет или ПВ), предназначенную для применения, когда значение характеризующего параметра выше или равно N2, и промежуточную последовательность 150, предназначенную для применения при значениях характеризующего параметра в диапазоне между N1 и N2.
Сейчас опишем каждую из последовательностей 130, 140, 150 операций.
Стандартная последовательность 130 операций включает традиционные шаги, направленные на открытие защелки реверсора, затем - на включение электрического двигателя 7. Эта последовательность содержит настроечный контур управления, предназначенный для поддержания вращающего момента, вырабатываемого электрическим двигателем 7 в значении ниже Trq1. Кроме того, контур управления 131 отслеживает частоту вращения электрического двигателя 7 и поддерживает ее ниже 1750 оборотов в минуту.
Контрольный шаг 132 анализирует путь, пройденный подвижными крышками 2. Если по истечении приблизительно 300 мс он превышает 35 мм, открытие продолжается, вращающий момент двигателя остается ограниченным значением Trq1 и команда 161 фиксирует предел скорости на значении 10740 оборотов в минуту, которая в этом примере является максимальной скоростью двигателя. Если нет, то есть, если подвижные крышки 2 не пройдут более 35 мм поступательного движения за менее приблизительно 300 мс, это означает, что либо мощности двигателя не достаточно для открытия реверсора в заданное полное время, либо двигатель заклинило. Тогда команда 162 устанавливает максимальный вращающий момент двигателя в более высокое значение Trq2. Затем выполняется контрольный шаг 163, назначение которого заключается в определении, работает ли электрический двигатель 7. Если не работает, то команда 164 переключает его в режим ожидания и сообщение о заклинивании двигателя посылается на шаге 165. Если электрический двигатель 7 работает, применяется шаг 161, увеличивающий скорость открытия, и открытие продолжается, пока не дойдет до завершения.
Последовательность 140 операций для условий, связанных с высокими нагрузками, отличается от стандартной последовательности 130 операций только тем, что вращающий момент двигателя ограничен значением Trq2. Следует отметить, что эта последовательность 140 операций является также и выполняемой по умолчанию последовательностью, применяемой, когда значение характеризующего параметра недоступно.
Промежуточная последовательность 150 операций отличается от последовательности 130 операций только тем, что вращающий момент двигателя ограничен значением Trqx, установленным применением функции, подобной значению характеризующего параметра. Эту подобную функцию определяют так, чтобы, с одной стороны, значение Trqx для характеризующего параметра, равного N1, было Trq1 и, с другой стороны, значение Trqx для характеризующего параметра, равного N2, было Trq2.
Из соображений безопасности, можно обеспечить, что последовательность 140 операций для связанных с высокими нагрузками сценариев будет включать контрольный шаг, посылающий на панель управления сообщение, когда по умолчанию выполнено, например, более трех последовательностей 140 операций для связанных с высокими нагрузками сценариев.
Шаги операций для способа управления согласно настоящему изобретению для закрытия реверсора 1 тяги изображены на Фиг.4.
В первую очередь, пилотом подается команда 200 - втянуть реверсор. За этой командой следует контрольный шаг 201, который либо разрешает, либо не разрешает втягивание в зависимости от состояния управляющего интерфейса 9. Если ответ от управляющего интерфейса 9 является отрицательным, то он прерывает 202 втягивание и посылает сообщение 203 через управляющий интерфейс 9 на панель управления.
Положительный ответ от управляющего интерфейса 9 инициирует начало втягивания 210.
В первую очередь, контрольный интерфейс 9 анализирует параметр, характеризующий скорость работы турбореактивного двигателя, полученный от контроллера ПАЦКД. Этот шаг анализа включает первый подшаг 211 и второй подшаг 212.
Первый подшаг 211 заключается в тестировании доступности характеризующего параметра. Если его значение получить нельзя, то инициируется выполняемая по умолчанию последовательность операций. В данном конкретном случае эта выполняемая по умолчанию последовательность операций идентична последовательности, предназначенной для связанных с высокими нагрузками сценариев, описание которой будет приведено далее.
Второй подшаг 212 использует значение характеризующего параметра, чтобы установить, какую последовательность - стандартная последовательность 230 операций и последовательность 240 операций для связанных с высокими нагрузками сценариев применять.
Стандартная последовательность 230 операций применяется, когда значение характеризующего параметра ниже значения N3, и содержит традиционные шаги, направленные на включение электрического двигателя 7 с намерением закрыть реверсор 1.
Эта последовательность содержит контур управления, предназначенный для поддержания вращающего момента, вырабатываемого электрическим двигателем 7, в значении ниже Trq3.
Последовательность 240 операций для связанных с высокими нагрузками сценариев применяется, когда значение характеризующего параметра выше значения N3, и отличается от стандартной последовательности 230 операций только тем, что вращающий момент двигателя ограничен значением Trq4, большим Trq3.
Кроме того, в начале стандартной последовательности 230 операций предусмотрен контрольный шаг 231, предназначенный для проверки работы электрического двигателя 7. Если двигатель не вращается, то применяется последовательность 240 для связанных с высокими нагрузками сценариев. Если электрический двигатель 7 работает, его скорость увеличивается командой 250, но тем не менее ограничена максимальной скоростью электрического двигателя 7, которая в этом примере составляет 9000 оборотов в минуту. Вращающий момент двигателя все еще поддерживается ниже или равным Trq3. Втягивание продолжается, пока не будет завершено.
Последовательность 240, предназначенная для связанных с высокими нагрузками сценариев, также содержит контрольный шаг 241, предназначенный для анализа работы электрического двигателя 7. Если электрический двигатель 7 не работает, то команда 242 переключает его в режим ожидания. Это потому, что переключение в режим ожидания предпочтительнее выключения подачи питания, поскольку аэродинамические силы, как и следовало ожидать, стремятся попытаться открыть подвижные крышки 2, поэтому необходимо поддерживать минимальный вращающий момент в режиме ожидания. Команда 243 затем посылает сообщение интерфейсу 9. Если электрический двигатель 7 работает, применяется шаг 250 и втягивание продолжается, пока не будет завершено.
На Фиг.5 и 6 показаны соответственно для развертывания и втягивания реверса 1 примеры графиков значений максимально допустимого вращающего момента, предоставленного как функция значения характеризующего параметра, являющегося результатом способов, описанных ранее и изображенных на Фиг.3 и 4. Эти графики предназначены, чтобы запрограммировать их в управляющем интерфейсе 9 и использовать для определения подходящей последовательности операций.
На Фиг.7 представлена в упрощенном виде блок схема основных цепей управляющего интерфейса 9, которым оборудован реверсор 1 тяги согласно настоящему изобретению. Управляющий интерфейс 9 управляет электрическим двигателем 7, состоящим из вентильного синхронного электродвигателя, выполненного с возможностью получения команд управления вращающим моментом или скоростью.
Подобный этому электрический двигатель 7 особо хорошо подходит для способа согласно настоящему изобретению. Его работа зависит от взаимодействия между магнитным полем ротора и вращающимся магнитным полем статора. В подобном этому электрическом двигателе 7 датчик выявляет точное положение ротора и позволяет преобразователю частоты поддерживать угол между полем ротора и вращающимся полем статора, равным 90°, чтобы вращающий момент двигателя всегда находился на его максимуме. Амплитудная модуляция вращающегося поля статора фиксирует значение вращающего момента двигателя. Датчик также предоставляет информацию касательно частоты вращения электрического двигателя 7.
При эксплуатации, чтобы скорость оставалась постоянной при уменьшении или увеличении нагрузки, необходимо уменьшать или увеличивать вращающий момент двигателя. Амплитуда вращающегося поля статора, следовательно, будет понижена или увеличена, но частота поля будет неизменной.
Интерфейс получает базовое значение 302 скорости, из которого компаратор 303 вычитает текущую скорость 304 электрического двигателя 7. Разницу между этими скоростями подают на регулятор 305 частоты оборотов, который вычисляет подходящий ответ в форме базового значения 306 вращающего момента. Это базовое значение 306 вращающего момента подают на компаратор 307, который вычитает из него текущий вращающий момент 308 электрического двигателя 7. Эта разница подается на регулятор 309 вращающего момента, который вырабатывает подходящее базовое значение 310 для электрического двигателя 7.
Хотя настоящее изобретение описано в соответствии с конкретными примерами воплощений, очевидно, что оно никоим способом не ограничено ими и что оно включает все технические эквиваленты описанных средств и их сочетаний, где они подпадают под рамки настоящего изобретения.
Изобретение относится к способу управления открытием или закрытием турбореактивного реверсора тяги с применением по меньшей мере одной подвижной крышки, установленной с возможностью перемещения посредством по меньшей мере одного электрического двигателя, характеризующемуся тем, что анализируют по меньшей мере один параметр, характеризующий давление в потоке турбореактивного двигателя, и выполняют последовательность операций, в которой рабочие параметры электрического двигателя приводят в соответствие рабочей ситуации. Технический результат изобретения - оптимизация экономии массы благодаря использованию электромеханических приводов и увеличение срока службы реверсора тяги. 2 н. и 15 з.п. ф-лы, 7 ил.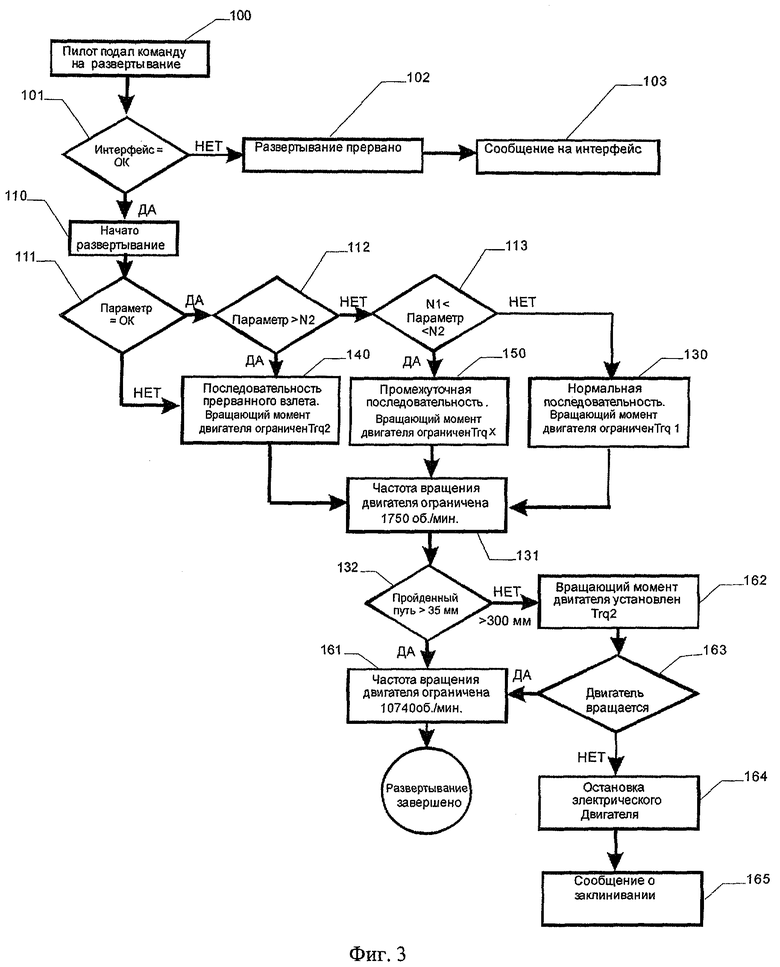
1. Способ управления открытием или закрытием турбореактивного реверсора (1) тяги, с применением по меньшей мере одной подвижной крышки (2), установленной с возможностью перемещения посредством по меньшей мере одного электрического двигателя (7), отличающийся тем, что он содержит следующие шаги, направленные на анализ (111, 112, 113, 211, 212) по меньшей мере одного параметра, характеризующего давление в потоке турбореактивного двигателя, выполнение последовательности (130, 140, 150, 230, 240) операций, в которой рабочие параметры электрического двигателя (7) приводят в соответствие рабочей ситуации.
2. Способ по п.1, отличающийся тем, что анализируемый характеризующий параметр получен из частоты вращения вала компрессора низкого давления турбореактивного двигателя.
3. Способ по п.1, отличающийся тем, что выполняемую последовательность операций выбирают из по меньшей мере двух предварительно заданных последовательностей (130, 140, 150, 230, 240), соответствующих условиям, в которых турбореактивный двигатель работает на малой скорости и высокой скорости, соответственно.
4. Способ по п.1, отличающийся тем, что когда выполняют последовательность (130, 140, 150, 230, 240) операций, электрический двигатель (7) развивает вращающий момент, меньший или равный максимально допустимому значению.
5. Способ по п.4, отличающийся тем, что когда значение параметра, характеризующего скорость турбореактивного двигателя, находится в пределах предварительно заданного диапазона, максимально допустимое значение вращающего момента, развиваемое электрическим двигателем (7), определяют, используя функцию, подобную значению характеризующего параметра.
6. Способ по п.3, отличающийся тем, что выполняемая последовательность (130, 230) операций для турбореактивного двигателя, работающего на малой скорости, содержит контрольный шаг (132, 231), предназначенный для проверки рабочего состояния электрического двигателя (7), который в случае, когда последний не работает, вызывает применение последовательности (140, 240) операций, предназначенных для турбореактивного двигателя, работающего на более высокой скорости.
7. Способ по п.1, отличающийся тем, что по меньшей мере в начале последовательности (130, 140, 150) операций, скорость электрического двигателя (7) ограничивают.
8. Способ по п.1, отличающийся тем, что выполняемая последовательность (130, 140, 150) операций содержит по меньшей мере один шаг проверки и регулировки скорости.
9. Способ по любому из пп.1-8, отличающийся тем, что последовательность (130, 140, 150, 230, 240) операций содержит контур (163, 241) управления, предназначенный для проверки рабочего состояния электрического двигателя (7) и способный выключить этот электрический двигатель.
10. Способ по любому из пп.1-8, отличающийся тем, что предусматривает запуск последовательности операций, заданной по умолчанию, при невозможности проанализировать характеризующий параметр.
11. Реверсор тяги (1), содержащий по меньшей мере одну подвижную крышку (2), установленную с возможностью перемещения с помощью по меньшей мере одного электрического двигателя (7), отличающийся тем, что электрическим двигателем управляют посредством по меньшей мере одного управляющего интерфейса (9), выполненного с возможностью последовательно анализировать по меньшей мере один параметр, характеризующий скорость турбореактивного двигателя, и вырабатывать по меньшей мере одно подходящее рабочее базовое значение (310).
12. Реверсор (1) по п.11, отличающийся тем, что управляющий интерфейс (9) соединен с блоком управления турбореактивным двигателем, вырабатывающим характеризующий параметр.
13. Реверсор (1) по любому из пп.11 или 12, отличающийся тем, что в качестве электрического двигателя используют вентильный синхронный электродвигатель (7).
14. Реверсор (1) по п.11, отличающийся тем, что электрический двигатель (7) выполнен с возможностью регулировки вращающего момента при постоянной скорости.
15. Реверсор по п.14, отличающийся тем, что управляющий интерфейс (9) содержит средства (309) регулировки, предназначенные для настройки вращающего момента, развиваемого электрическим двигателем (7).
16. Реверсор (1) по любому из пп.14 и 15, отличающийся тем, что управляющий интерфейс (9) выполнен с возможностью получения базового значения (302) скорости и преобразования его в управляющий сигнал (310) вращающего момента, выдаваемый электрическому двигателю (7).
17. Реверсор по п.16, отличающийся тем, что управляющий интерфейс (9) содержит средства (305) регулировки, предназначенные для настройки скорости электрического двигателя (7).
| US 2003019206 A1, 30.01.2003 | |||
| Буровое шарошечное долото планетарно-эксцентрикового типа | 1972 |
|
SU466316A1 |
| ЕР 128280029 А, 29.01.2003 | |||
| Устройство для защиты от междуфазногоКОРОТКОгО зАМыКАНия B СЕТи пЕРЕМЕННО-гО TOKA | 1979 |
|
SU843089A1 |
| СИСТЕМА ЭЛЕКТРИЧЕСКОГО УПРАВЛЕНИЯ ДЛЯ УСТРОЙСТВА РЕВЕРСИРОВАНИЯ ТЯГИ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ | 1997 |
|
RU2142569C1 |
| RU 2003131383 А, 10.04.2005 | |||
| RU 2003131382 A, 10.04.2005. | |||

