Заявленное изобретение относится к способу и системе управления по меньшей мере одним приводом капотов реверсора тяги для турбореактивного двигателя.
Назначение реверсора тяги состоит в повышении эффективности торможения самолета при его посадке за счет перенаправления вперед по меньшей мере части тяги, развиваемой турбореактивным двигателем. На этом шаге реверсор перекрывает реактивное сопло, направляя выходящий из двигателя поток к передней стороне гондолы, в результате чего создается обратная тяга, которая складывается с торможением колес самолета.
В зависимости от типа реверсора могут использоваться разные средства для достижения подобного перенаправления потока. Тем не менее, во всех случаях конструктивно реверсор включает в себя подвижные капоты, имеющие возможность перемещаться из выдвинутого положения, в котором они открывают в гондоле канал для отклоненного потока, в убранное положение, в котором они перекрывают указанный канал. Эти подвижные капоты могут, кроме того, выполнять функцию отклонения или всего лишь активации иных отклоняющих средств.
Так, например, в решетчатых реверсорах подвижные капоты скользят по направляющим рельсам таким образом, что при отходе назад на шаге открытия они высвобождают решетки отклоняющих лопаток, находящиеся в корпусе гондолы. Имеется система тяг, соединяющая этот подвижный капот с блокировочными створками, которые выдвигаются внутрь выпускного канала, блокируя при этом выход в режиме прямой тяги. В реверсорах же створчатого типа каждый подвижный капот поворачивается таким образом, что он блокирует поток, отклоняя его и, следовательно, в процессе указанного перенаправления действует активно.
Привод таких подвижных капотов осуществляется, как правило, с помощью гидравлических или пневматических силовых цилиндров, для которых требуется отдельная сеть подачи текучей среды под давлением. Такую текучую среду обычно получают либо путем отвода воздуха из турбореактивного двигателя при работе с пневматическими системами, либо отбором из гидравлической системы самолета. Для подобных систем требуется проведение довольно значительных работ по техобслуживанию, поскольку малейшая утечка из гидравлической или пневматической сети может обнаруживаться с трудом и чревата негативными последствиями как на обратной стороне, так и в других частях гондолы. Кроме того, учитывая наличие недостаточного свободного пространства в передней раме реверсора, монтаж и защита подобной системы являются сложными и загромождающими.
Для устранения разнообразных недостатков, связанных с пневматическими или гидравлическими системами, производители реверсоров тяги предприняли попытки их замены, оборудуя свои реверсоры в максимально возможной степени более легкими и надежными электромеханическими приводами. Такой реверсор описан в документе ЕР 0843089.
При использовании подобных приводов появляется возможность осуществлять сервоуправление перемещениями выдвигания и убирания капота реверсора тяги в зависимости от положения капота на пути его перемещения из открытого положения в закрытое.
Для этой цели используют, как известно, датчики абсолютного положения, расположенные на капотах и/или приводах, а также датчики скорости, устанавливаемые на валу электродвигателя привода, как открыто в документе WO 2006/134253.
В этих условиях при возникновении неисправности таких датчиков становится невозможным управление перемещением капота.
Кроме этого, известно, в частности из документа WO 03/010430, что в случае прерывания работы в процессе убирания или выдвигания, например, из-за временного отключения электропитания с последующим его возобновлением, капот реверсора тяги автоматически возвращается в исходную точку, соответствующую убранному положению. Поэтому невозможно знать точное положение капота до тех пор, пока он не будет убран.
Цель заявленного изобретения состоит в устранении указанных выше недостатков за счет обеспечения способа управления, который позволил бы свести к минимуму случаи неработоспособности реверсора тяги.
Для достижения указанной цели предложен способ управления по меньшей мере одним приводом капотов реверсора тяги для турбореактивного двигателя, приводимым в действие электродвигателем, содержащим датчик относительного положения, предоставляющий информацию об изменении его перемещения, при этом осуществляют серворегулирование управляющего воздействия двигателя в зависимости от мгновенного положения капота по меньшей мере на участке его пути перемещения из открытого положения в закрытое положение, причем мгновенное положение капота определяют как функцию по меньшей мере одного абсолютного элемента данных об исходном положении и данных об относительном положении относительно указанного исходного положения, предоставляемых датчиком относительного положения электродвигателя, при этом в случае возобновления приведения в движения после его прерывания начинают новое определение исходного положения.
Благодаря предложенным согласно изобретению мерам, мгновенное положение рассчитывают на основании некоторой последовательной информации об относительном положении, поступающей от датчика относительного положения электродвигателя. Информацию об исходном положении можно определить несколькими различными путями, что позволяет уменьшить зависимость от датчиков абсолютного положения и обеспечить более эффективное функционирование после перебоя в работе.
Предпочтительно, исходное положение определяют как крайнее положение хода капота.
Крайнее положение капота можно определить без использования датчика абсолютного положения, например, посредством датчика приближения.
В соответствии с одним из вариантов реализации заявленного изобретения исходное положение определяют на основании по меньшей мере одного элемента данных об абсолютном положении капота, предоставляемого датчиком абсолютного положения капота.
Предпочтительно, исходное положение рассчитывают как среднее из по меньшей мере двух значений абсолютного положения, предоставляемых датчиками абсолютного положения капота.
В соответствии с одним из вариантов реализации заявленного изобретения значения положения, предоставляемые по меньшей мере одним датчиком абсолютного положения капотов, сравнивают с некоторым диапазоном значений, соответствующим ходу капота.
В соответствии с одним из вариантов реализации заявленного изобретения в случае сбоя при определении значения исходного положения управление электродвигателем изменяют таким образом, чтобы уменьшить крутящий момент и/или скорость двигателя.
В результате этих мер открытие и закрытие реверсора тяги становятся более медленными, но все-таки удается поддерживать его работу, несмотря на сбой датчика.
Приведение в движение на более медленной скорости предотвращает повреждение конструкции в случае отсутствия информации о положении.
В соответствии с одним из вариантов реализации заявленного изобретения положение останова используют для определения исходного положения при возобновлении.
Предпочтительно, сигнал относительного положения электродвигателя и положение останова используют для определения нового исходного положения.
Предметом изобретения является также система управления по меньшей мере одним приводом капотов реверсора тяги для турбореактивного двигателя, содержащая:
- по меньшей мере один привод капота, приводимый в действие по меньшей мере одним электродвигателем, и
- средства управления приводом и электродвигателем,
- причем электродвигатель имеет датчик относительного положения, предоставляющий информацию об изменении его перемещения,
в которой средства управления выполнены с возможностью обеспечивать осуществление шагов вышеуказанного способа.
Изобретение станет более понятным в ходе изучения нижеследующего описания, приводимого со ссылками на приложенные схематические чертежи, которые иллюстрируют один из вариантов выполнения системы с использованием предлагаемого способа в качестве примера, не имеющего ограничительного характера.
На фиг.1 схематически представлено частичное аксонометрическое изображение гондолы, содержащей решетчатый реверсор тяги;
на фиг.2 схематически изображены подвижные капоты и их приводная система;
на фиг.3 схематически изображена система управления приводами подвижных капотов;
на фиг.4 представлена блок-схема способа согласно заявленному изобретению;
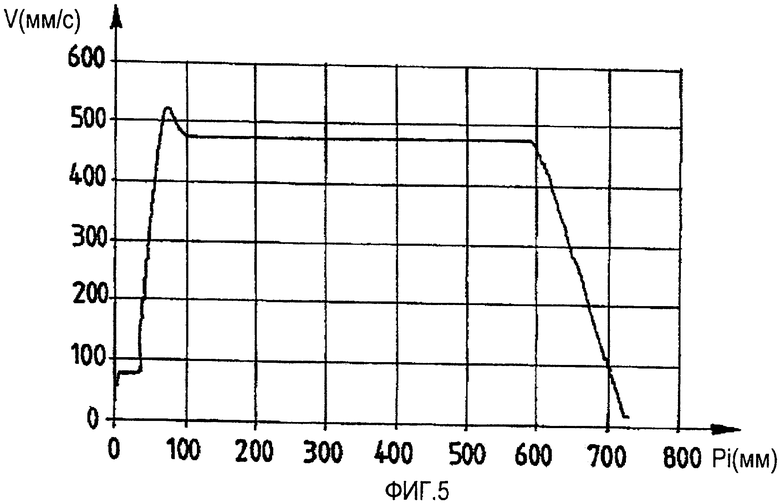
на фиг.5 представлен один из примеров изменения скорости перемещения капота в зависимости от его положения на шаге выдвигания.
Прежде чем перейти к подробному описанию одного из вариантов реализации заявленного изобретения важно уточнить, что рассматриваемая здесь система не ограничивается каким-то одним частным типом реверсора тяги. Хотя изобретение описано здесь применительно к решетчатому реверсору, его вполне можно использовать и для других конструкций реверсоров, в частности створчатых.
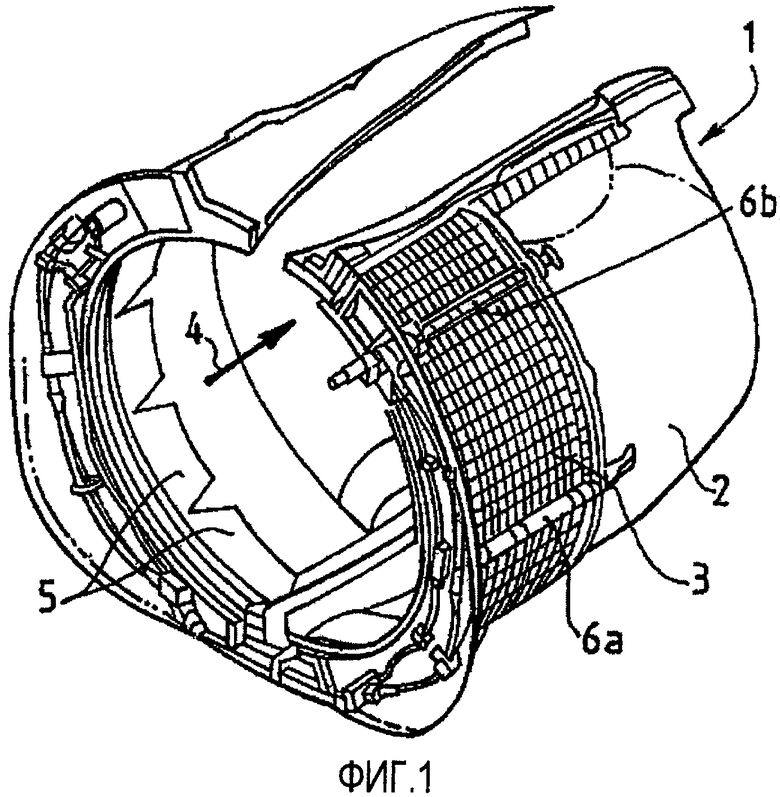
На фиг.1 приведен частичный схематический вид гондолы, содержащей реверсор тяги 1. Турбореактивный двигатель здесь не показан. Указанный реверсор тяги 1 имеет конструкцию, включающую в себя два полукруглых подвижных капота 2, которые могут совершать скользящее перемещение, приоткрывая решетки 3 отклоняющих лопаток, находящиеся между подвижными капотами 2 и секцией для прохода отклоняемого воздушного потока 4. Внутри конструкции размещены блокировочные створки 5, выполненные с возможностью поворота и перехода из положения, в котором они не препятствуют проходу воздушного потока 4, в положение, в котором они блокируют этот проход. Для того чтобы добиться координации открытия подвижных капотов 2 с перекрывающим положением блокировочных створок 5 последние механически соединены с подвижным капотом 2 с помощью шарниров и с неподвижной конструкцией с помощью системы тяг (не показаны).
Перемещение подвижных капотов 2 вдоль наружной поверхности конструкции обеспечивается с помощью группы силовых цилиндров 6а, 6b, установленных на передней раме, внутри которой размещены электродвигатель 7 и гибкие передаточные валы 8а, 8b, присоединенные, соответственно, к силовым цилиндрам 6а, 6b с целью их приведения в действие.
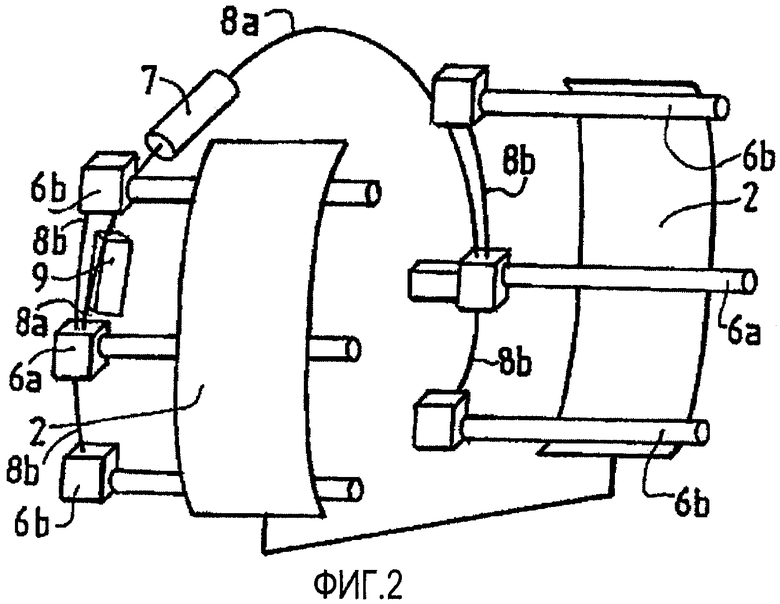
Система привода подвижных капотов 2 показана отдельно на фиг.2. Каждый подвижный капот 2 может поступательно перемещаться под действием трех силовых цилиндров 6а, 6b, в состав которых входят один центральный силовой цилиндр 6а и два дополнительных силовых цилиндра 6b, которые приводятся в действие одним электродвигателем 7, подключенным к средствам 9 управления, содержащим микроконтроллер. Выходная мощность электродвигателя 7 подается, прежде всего, на центральные силовые цилиндры 6а посредством двух гибких передаточных валов 8а, а затем на дополнительные силовые цилиндры 6b посредством гибких передаточных валов 8b.
В соответствии с одним из не представленных здесь вариантов для каждого капота используются только два силовых цилиндра, верхний и нижний, которые приводятся в действие одним электродвигателем, подключенным к управляющему интерфейсу. Выходная мощность электродвигателя подается на два силовых цилиндра, верхний и нижний, посредством двух гибких передаточных валов 8а.
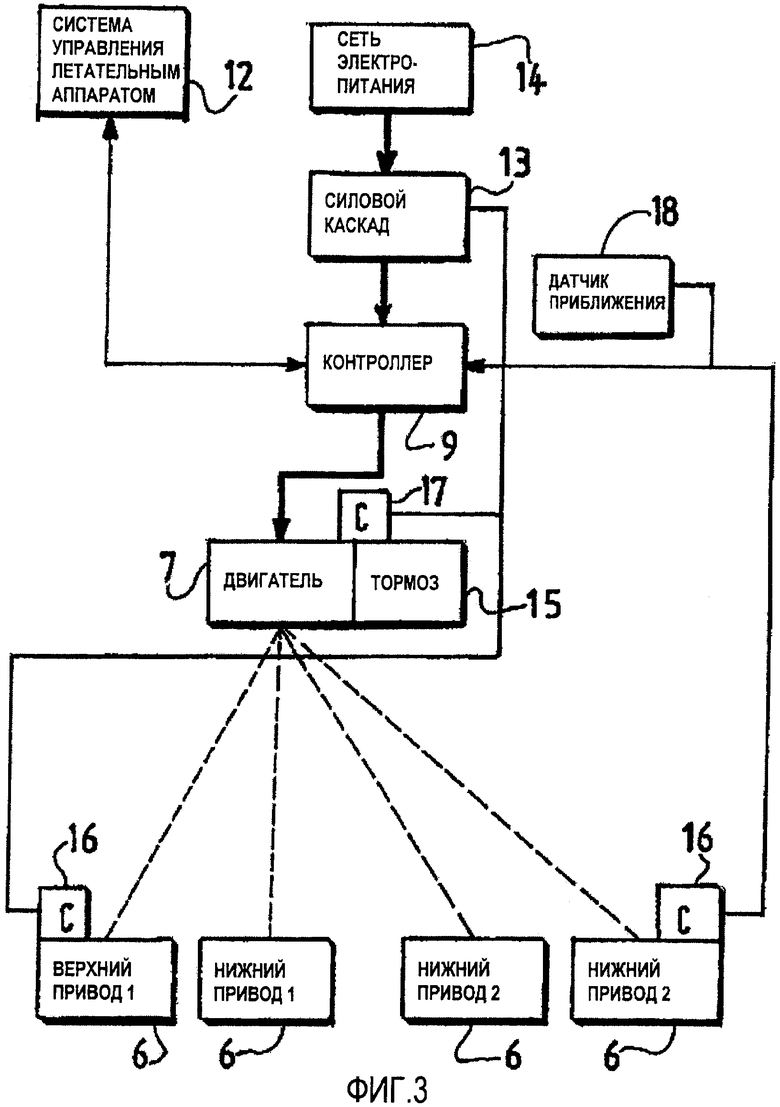
На фиг.3 схематически показана система управления приводом двух капотов с использованием для каждого капота двух приводов - верхнего и нижнего.
Как показано на фиг.3, предлагаемая система управления приводами реверсора тяги содержит средства управления, содержащие микроконтроллер 9.
Этот микроконтроллер соединен с помощью средств 10 связи с системой 12 управления летательным аппаратом.
Кроме того, в состав системы управления входит силовой каскад 13, соединенный с бортовой сетью 14 электропитания летательного аппарата.
Микроконтроллер 9 обеспечивает управление работой электродвигателя 7 и силовых цилиндров, или приводов, 6, как описано выше. Двигатель включает в себя также тормоз 15, работой которого управляет тот же микроконтроллер 9.
Система включает в себя также датчики 16 абсолютного положения, обеспечивающие возможность предоставления информации о перемещении капота 2 между открытым и закрытым положениями. Эти датчики могут быть помещены на капоте 2 или на приводе 6.
Электродвигатель 7 содержит датчик 17 относительного положения, который предоставляет информацию об изменении перемещения подвижной части электродвигателя.
Кроме того, система содержит датчики приближения 18, обеспечивающие возможность независимой идентификации датчиков 16 абсолютного положения, если капот находится в открытом или закрытом положении.
В рассматриваемом варианте реализации заявленного изобретения эти датчики непосредственно соединены с контроллером 9. В соответствии с другим вариантом эти датчики соединены с системой управления летательным аппаратом, которая передает сигнал от такого датчика контроллеру 9.
Средства 9 управления выполнены с возможностью осуществлять серворегулирование электродвигателя 7 в зависимости от положения капота 2 на пути его перемещения из открытого положения в закрытое.
Для осуществления такого серворегулирования средства 9 управления выполняют таким образом, чтобы они могли определять мгновенное положение Pi капота 2 в зависимости от некоторого абсолютного элемента данных об исходном положении Pref и от интегрирования или суммирования данных об относительном положении δPrel, получаемых посредством датчика относительного положения двигателя, начиная с этого исходного положения Pref и заканчивая мгновенным положением, что можно выразить следующей формулой:
Pi=Pref+∫δPrel
Исходное положение следует определять тогда, когда имеются в распоряжении датчики 16 абсолютного положения, но также и в тех случаях, когда их нет в распоряжении.
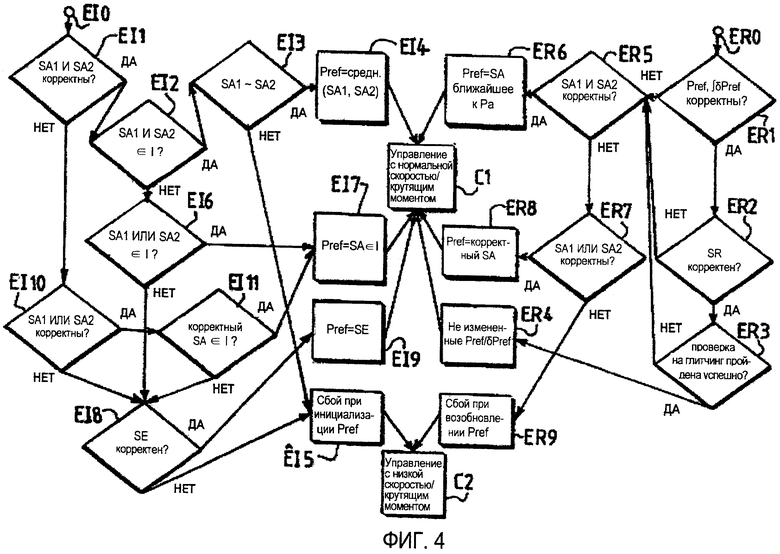
На фиг.4 иллюстрируется способ определения исходного положения Pref. Это положение следует определять тогда, когда пользователь инициирует какую-либо операцию по приведению в движение капотов реверсора тяги. Кроме того, это положение надо определять в случае прерывания операции приведения в движение, за которым следует возобновление этой операции. Такие ситуации прерывания и возобновления могут иметь место, например, при временном отключении электропитания.
В этих двух различных ситуациях способ включает в себя ряд шагов, направленных на определение возможного используемого исходного положения Pref.
В случае, когда возможно определение исходного положения Pref, выполняют управление с нормальной скоростью, используя для этого, например, кривую серворегулирования скорости V как функцию мгновенного положения Pi в процессе хода, показанную на фиг.5. Следует отметить, что в зависимости от положения также осуществляется серворегулирование крутящего момента двигателя.
В случае, когда определение исходного положения Pref невозможно, система не располагает надежной информацией о положении капота, при этом применяют управляющее воздействие С2 для приведения в движение с низкой скоростью и/или с небольшим крутящим моментом. В результате открытие и закрытие реверсора тяги замедляются, однако все-таки удается поддерживать его работу, несмотря на отсутствие информации о положении.
Приведение в движение с низкой скоростью предотвращает повреждение конструкции в случае отсутствия информации о положении. Конец хода капота можно выявить благодаря увеличению крутящего момента и/или увеличению тока через двигатель, либо по приему сигнала, поступающего от датчика приближения.
Как показано на фиг.4, инициализацию мгновенного положения Pi при исходном положении Pref осуществляют, начиная с некоторой исходной точки EI0 в процессе проведения операции выдвигания или открытия при получении команды от пользователя.
На первом шаге EI1 проверяют на соответственность сигналы SA1 и SA2, поступающие от датчиков 16 абсолютного положения. Здесь под «соответственным сигналом» следует понимать имеющийся сигнал, который соответствует какой-либо применимой информации о положении.
Если выясняется, что сигналы, поступающие от этих двух датчиков 16, соответственны, то переходят к выполнению второго шага EI2.
На втором шаге EI2 проверяют, находятся ли указанные два сигнала SA1 и SA2 внутри интервала значений I, соответствующего ходу капота 2, причем эта группа значений может быть увеличена на некоторый допуск. Так, например, при ходе порядка 730 мм можно предусмотреть допуск, равный 10 мм, что даст интервал значений от -10 до +740 мм.
Если установлено, что указанные два сигнала SA1 и SA2 находятся в интервале I, переходят к выполнению третьего шага EI3.
На третьем шаге EI3 проверяют, согласуются ли друг с другом поступающие от датчиков сигналы SA1 и SA2, то есть близки ли друг к другу их значения, для чего их сравнивают с некоторым заданным приемлемым порогом различия.
Если установлено, что указанные два сигнала SA1 и SA2 близки, переходят к выполнению четвертого шага EI4.
На четвертом шаге EI4 выполняют инициализацию мгновенного положения Pi двигателя при некотором исходном значении Pref, соответствующем среднему из значений сигналов SA1 и SA2 от датчиков 16 абсолютного положения.
После выполнения рассматриваемого четвертого шага осуществляют управляющее воздействие С1 с нормальной скоростью приведения в движение капота, для чего вычисляют мгновенное положение Pi капота в соответствии с абсолютным элементом данных об исходном положении Pref и с интегрированием данных об относительном положении Prel, предоставляемых датчиком 17 относительного положения двигателя, начиная с этого исходного положения Pref.
Рассмотренная выше последовательность шагов от EI0 до С1 соответствует номинальному случаю эксплуатации, когда значения SA1 и SA2 двух датчиков 16 абсолютного положения имеются в распоряжении пользователя и могут быть им использованы.
В случае, когда по результатам проверки на согласование значений на шаге 3 выясняется, что эти значения не являются близкими, переходят к выполнению пятого шага Е5.
Пятый шаг Е5 соответствует определению сбоя при инициализации начального положения Pi.
В этих условиях требуется низкоскоростное управляющее воздействие С2.
В случае, если по результатам проверки на шаге EI2 выясняется, что два значения сигналов SA1 и SA2 от датчиков 16 абсолютного положения не находятся в интервале I, переходят к выполнению шестого шага EI6.
На шестом шаге EI6 проверяют, находится ли в интервале I по меньшей мере один из сигналов SA1 и SA2, поступающих от датчика 16 абсолютного положения.
Если один из сигналов от указанных датчиков действительно находится в интервале I, переходят к выполнению седьмого шага EI7.
На седьмом шаге EI7 осуществляют инициализацию мгновенного положения Pi двигателя при некотором исходном значении Pref, соответствующем значению сигнала SA от датчика 16 абсолютного положения, которое находится в интервале I.
По завершении седьмого шага EI7 осуществляют управляющее воздействие С1 с нормальной скоростью приведения в движение капота с использованием нового определенного исходного значения Pref.
В случае, если по результатам шестого шага ЕI6 оказывается, что ни одно из значений сигналов SA1 и SA2 от датчиков 16 абсолютного положения не находится в интервале I, переходят к выполнению восьмого шага EI8.
На восьмом шаге EI8 проверяют наличие сигнала SE, поступающего, например, от датчика 19 приближения и указывающего на то, что капоты 2 находятся на одном из концов своего хода, например, дошли до упора в открытом или закрытом положении.
Если имеется подобная информация о положении Pb упора, переходят к выполнению девятого шага EI9.
На девятом шаге EI9 осуществляют инициализацию мгновенного положения Pi двигателя при исходном значении Pref, соответствующем выявленному конечному положению SE.
По завершении девятого шага EI9 осуществляют управляющее воздействие С1 с нормальной скоростью приведения в движение капота 2 с использованием определенного в свое время исходного значения Pref.
Если по результатам проверки на первом шаге EI1 выясняется, что сигналы SA1 и SA2 от двух датчиков 16 абсолютного положения не являются соответственными, то переходят к выполнению десятого шага EI10.
На десятом шаге EI10 проверяют, является ли соответственным хотя бы один из сигналов SA1 и SA2 от датчика 16 абсолютного положения.
Если по результатам проверки на десятом шаге EI10 выясняется, что сигнал SA от одного из датчиков 16 абсолютного положения является соответственным, то переходят к выполнению одиннадцатого шага EI11.
На одиннадцатом шаге EI11 проверяют, находится ли значение SA сигнала, поступающего отдатчика 16 абсолютного положения, в интервале I.
Если сигнал SA от датчика 16 абсолютного положения действительно находится в интервале I, то выполняют описанный выше седьмой шаг EI7, а затем на нормальной скорости осуществляют управляющее воздействие С1 с нормальной скоростью приведения в движение капота 2 с использованием определенного в свое время исходного значения Pref.
В случае, если по результатам шага EI11 оказывается, что сигнал SA от датчика 16 абсолютного положения не находится в интервале I, выполняют описанный выше шаг EI8, а также последующие шаги.
Если по результатам проверки на десятом шаге EI10 выясняется, что сигнал от датчика 16 абсолютного положения не является соответственным, выполняют описанный выше шаг EI8, а также последующие шаги.
Рассмотренные выше шаги предлагаемого способа соответствуют инициализации и операции приведения в движение, начиная с приема команды на управление приводом.
В случае прерывания операции приведения в движение в процессе выдвигания возобновление этой операции осуществляется путем выполнения описываемых ниже шагов, начиная с исходной точки ER0.
На первом шаге ER1 проверяют, являются ли значения переменных, сформированных, с одной стороны, исходным положением Pref и, с другой стороны, интегрированием данных об относительном положении датчика ∫δPrel, все еще достоверными применительно к данному состоянию системы. Можно условиться, например, что по истечении некоторого периода прерывания эти значения перестают быть достоверными.
Если значение указанных выше переменных считают достоверным, то пересчет нового значения Pref априори не нужен.
Однако целесообразно, чтобы были выполнены два дополнительных проверочных шага ER2 и ER3.
На втором шаге ER2 выясняют, совместимо ли значение сигнала относительного положения SR, выдаваемого датчиком положения двигателя, который предоставляет данные об относительном положении δPrel, со значениями переменных Pref и ∫δPrel, имеющимися в контроллере 9.
На третьем шаге ER3 проверяют, не содержит ли сигнал SR значений с отклонениями, поступающих от датчика абсолютного положения, которые отражают явление, выражающееся в появлении пиковых сигналов, также называемое «глитчингом».
Если результаты проверок на обоих шагах ER2 и ER3 положительны, то выполняют четвертый шаг ER4.
На четвертом шаге ER4 выполняют возобновление пуска, используя значения Pref и ∫δPrel, которые имели место до прерывания.
Это соответствует ситуации, когда капот не сместился относительно его положения останова Ра, имевшего место до прерывания.
Осуществляют управляющее воздействие С1 с нормальной скоростью приведения в движение капота 2, пользуясь определенными в свое время значениями Pref и ∫δPrel.
В соответствии с одним из вариантов реализации заявленного изобретения в этой ситуации можно использовать значение Ра в качестве нового исходного значения и возобновить интегрирование значений относительного положения.
В случае отрицательных результатов проверок на трех первых шагах ER1, ER2 или ER3 выполняют ряд шагов, начиная с пятого шага ER5, с целью определения нового исходного положения Pref, на основании которого будет осуществлено повторное интегрирование значений относительного положения.
На пятом шаге ER5 проверяют соответственность сигналов SA1 и SA2, поступающих от датчиков 16 абсолютного положения.
Если эти сигналы оказываются соответственными, переходят к выполнению шестого шага ER6.
На шестом шаге ER6 значение положения SA, вырабатываемое датчиком абсолютного положения, которое наиболее близко к положению Ра в момент прерывания работы, используют для возобновления приводящего в движение перемещения, а затем осуществляют управляющее воздействие С1 с нормальной скоростью приведения в движение капота 2, используя определенное в свое время исходное значение Pref.
Если по результатам проверки на пятом шаге ER5 выясняется, что сигналы SA1 и SA2 от двух датчиков 16 абсолютного положения не являются соответственными, переходят к выполнению седьмого шага ER7.
На седьмом шаге ER7 проверяют, является ли соответственным хотя бы один из сигналов SA от датчика 16 абсолютного положения.
Если по результатам проверки на седьмом шаге ER7 выясняется, что один из сигналов SA от датчика 16 абсолютного положения является соответственным, переходят к выполнению восьмого шага ER8.
На восьмом шаге ER8 вырабатываемое датчиком абсолютного положения значение положения SA, которое является соответственным, используют для возобновления приводящего в действие перемещения, а затем осуществляют управляющее воздействие С1 с нормальной скоростью приведения в движение капота 2, используя определенное в свое время исходное значение.
Если по результатам проверки на седьмом шаге ER7 выясняется, что ни один из сигналов SA1, SA2 от датчика 16 абсолютного положения не является соответственным, переходят к выполнению девятого шага ER9.
На девятом шаге ER9 устанавливают, что не имеется никакой достоверной информации о положении.
В этих условиях необходимо выполнить низкоскоростное управляющее воздействие С2.
Следует иметь в виду, что описанный выше способ управления можно запрограммировать на компьютере с помощью соответствующих программных средств.
Разумеется, изобретение не ограничивается единственным вариантом осуществления системы, описанным выше в качестве примера, а, напротив, охватывает его всевозможные модификации.
Изобретение относится к способу управления по меньшей мере одним приводом капотов реверсора тяги для турбореактивного двигателя. Капот реверсора тяги приводится в действие электродвигателем, содержащим датчик относительного положения, предоставляющий информацию об изменении его перемещения, в котором электродвигателем управляют в зависимости от мгновенного положения капота по меньшей мере на одном участке его перемещения из открытого положения в закрытое положение, причем мгновенное положение капота определяют как функцию по меньшей мере одного абсолютного элемента данных об исходном положении и данных об относительном положении относительно указанного исходного положения, предоставляемых датчиком относительного положения двигателя, при этом в случае возобновления процесса приведения в движение после его прерывания начинают новое определение исходного положения. Изобретение позволяет повысить эффективность торможения самолета при его посадке. 7 з.п. ф-лы, 5 ил.
1. Способ управления по меньшей мере одним приводом (6) капотов (2) реверсора тяги для турбореактивного двигателя, приводимым в действие электродвигателем (7), содержащим датчик (17) относительного положения, предоставляющий информацию (SR, δPrel) об изменении его перемещения,
в котором осуществляют серворегулирование (С1) управляющего воздействия электродвигателя (7) в зависимости от мгновенного положения (Pi) капота (2) по меньшей мере на участке его перемещения из открытого положения в закрытое положение, причем мгновенное положение (Pi) капота определяют как функцию по меньшей мере одного абсолютного элемента данных (Pref) об исходном положении и данных (δPrel) об относительном положении относительно указанного исходного положения, предоставляемых датчиком (17) относительного положения электродвигателя,
в котором в случае возобновления процесса приведения в движение после его прерывания, начинают определение нового исходного положения (Pref) перед возобновлением указанного процесса приведения в движение.
2. Способ по п.1, в котором исходное положение или новое исходное положение (Pref) определяют (EI8, EI9) как крайнее положение (SE) хода капота.
3. Способ по п.1 или 2, в котором исходное положение (Pref) определяют (EI4, EI7) на основании по меньшей мере одного элемента данных (SA1, SA2) об абсолютном положении капота, предоставляемого датчиком (16) абсолютного положения капота (2).
4. Способ по п.1 или 2, в котором исходное положение (Pref) рассчитывают (EI4) как среднее из по меньшей мере двух значений (SA1, SA2) абсолютного положения, предоставляемых датчиками (16) абсолютного положения капота (2).
5. Способ по п.1 или 2, в котором значения положения (SA1, SA2), предоставляемые по меньшей мере одним датчиком (16) абсолютного положения капотов (2), сравнивают (EI2, EI6, EI11) с диапазоном (I) значений, соответствующим ходу капота (2).
6. Способ по п.1 или 2, в котором в случае сбоя при определении (EI5, ER9) значения (Pref) исходного положения или значения (Pref) нового исходного положения управление электродвигателем (7) изменяют (С2) таким образом, чтобы уменьшить крутящий момент и/или скорость двигателя.
7. Способ по п.1 или 2, в котором положение останова используют (ER6, ER4) для определения исходного положения (Pref) при возобновлении.
8. Способ по п.1 или 2, в котором сигнал (SR) относительного положения электродвигателя и положение останова (Ра) используют (ER4) для определения нового исходного положения.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| US 4827248 A, 02.05.1989 | |||
| US 5638383 A, 10.06.1997 | |||
| РЕВЕРСИВНОЕ УСТРОЙСТВО НАРУЖНОГО КОНТУРА ТУРБОРЕАКТИВНОГО ДВУХКОНТУРНОГО ДВИГАТЕЛЯ | 1988 |
|
RU1563310C |

