Предложение относится к трубопроводному транспорту и может быть использовано в процессе работ по очистке, ремонту и диагностике различных по назначению трубопроводов. Такие работы осуществляются с помощью внутритрубных самодвижущихся аппаратов и тяговых устройств, для перемещения которых обычно используется давление транспортируемого продукта.
Устройства часто снабжают дополнительными элементами: чистящими щетками, скребками, уплотнительными полиуретановыми манжетами и др.
Такое устройство, двигаясь в канале газопровода, замедляется или совершает остановки в местах сужения канала. Необходимое для преодоления сужения давление газа накапливается в участке газопровода от газоперекачивающей станции до места остановки устройства. Так как протяженность такого участка может составлять многие километры, то потенциальная энергия сжатого газа достигает значительной величины. Когда устройство преодолевает сужение, потенциальная энергия, накопленная сжатым газом, высвобождаясь, разгоняет устройство до скоростей, превышающих допустимую по условиям трения полиуретановых манжет, которые, оплавляясь, перестают выполнять свои функции. При этом устройство может или остановиться, или, влетая на большой скорости в криволинейный участок газопровода, создаст сверхдопустимые нагрузки на стенки и приведет к серьезной аварии. Во избежание таких последствий очистку газопроводов производят, уменьшая скорость перекачки газа, не снижая давления на входе в газопровод.
В настоящее время разработаны и используются внутритрубные аппараты с управляемым байпасом. Такие аппараты позволяют пропускать часть потока газа через корпус, не допуская чрезмерного роста давления на него перекачиваемого продукта и, соответственно, недопустимой скорости движения, см. «Способ регулирования движения аппарата для внутритрубного обследования трубопровода и аппарат для его осуществления» (патент РФ 2270955 С2, публ. 27.02.2006. Бюл. №6).
Способ заключается в том, что для регулирования скорости движения используют энергию транспортируемого продукта посредством установки на аппарате автоматически управляемых систем перепускания транспортируемого продукта и связанных с ними тормозных устройств. Регулирование скорости осуществляют посредством открытия или закрытия в зависимости от давления в этой зоне внутренних и/или внешних байпасных каналов для перетекания текучей среды и выработки при этом энергии для торможения аппарата.
Аппараты для реализации такого способа достаточно сложны и дороги, так как содержат датчики скорости, ускорения, электронный блок обработки информации, электромеханический привод и батареи питания.
В виду высокой стоимости и сложности эксплуатации аппараты типа «управляемый байпас» не получили широкого распространения, в том числе и в качестве тяговых устройств.
Известен движитель для перемещения внутри трубы, использующий способ силового взаимодействия устройства со стенкой трубопровода (см. описание к авторскому свидетельству 951796 от 15.12.84. Бюл. №46). Движитель включает ротор, содержащий фрикционные ролики и установленные на валу ротора дисбалансы, соединенный гибкой связью с приводом. Для повышения надежности работы он снабжен вращающейся ступенчатой втулкой на валу ротора, причем фрикционные ролики размещены на втулке.
Это способ перемещения применим лишь для открытых трубопроводов. К тому же такой движитель не эффективен, так как фрикционные ролики не создадут достаточных усилий взаимодействия со стенкой трубопровода.
Наиболее близким аналогом является «Способ введения плети пластмассовых труб в восстанавливаемый негерметичный трубопровод и устройство для его осуществления» (см. патент РФ 2319059 С2, публ. 10.03.2008. Бюл. №7).
Методом «труба в трубе» протягивают плети в изношенный негерметичный трубопровод внутритрубным устройством - тяговым механизмом с пневматическим автоматическим приводом шагового перемещения. Отличие способа заключается в том, что тяговое усилие создают в результате силового взаимодействия со стенками трубопровода перемещаемого внутри него тягового механизма. Механизм состоит из двух звеньев с приводом шагового перемещения одного звена относительно другого. Перемещение осуществляется посредством силового пневмоцилиндра, установленного между звеньями. Каждое из звеньев имеет средство его фиксации в виде тороидальных пневмокамер.
Для шагового перемещения звеньев относительно друг друга необходимо оснащение внутритрубного устройства рядом сложных узлов: компрессором, пневмопроводом, пневмокамерами, пневмораспределительным золотником с магнитной фиксацией его в крайних положениях. Поэтому этот способ технологически сложен при задействовании систем его функционирования и конструктивной реализации тягового механизма. К тому же данный способ предназначен для решения сравнительно узкой задачи - ремонта изношенных открытых трубопроводов.
Техническая задача изобретения заключается в расширении функциональных возможностей, упрощении способа создания и регулирования тягового усилия самодвижущихся внутритрубных устройств, а также упрощении конструкции таких устройств.
Для решения этой задачи в способе перемещения устройства в трубопроводе, включающем силовое взаимодействие устройства со стенкой трубопровода, для перемещения используется упругий элемент, радиально обжатый в трубопроводе, которому задается качательное движение. Движение задается таким образом, что центральная ось устройства с закрепленным упругим элементом описывает коническую поверхность с вершиной конуса, лежащей на оси трубопровода на уровне плоскости силового взаимодействия упругого элемента со стенкой трубопровода.
Величину тягового усилия в предлагаемом способе регулируют путем изменения частоты и/или амплитуды качательных движений.
Это достигается также путем сочленения в последовательную цепочку двух или более устройств.
Для компенсации вращающего момента сочленяют попарно устройства, имеющие противоположные направления качательного движения.
Реализующее способ устройство для перемещения в трубопроводе содержит корпус и закрепленную на нем упругую манжету. Манжета, обжатая в канале трубопровода, использована в качестве движителя. Корпус связан с приводом кругового качания таким образом, что его центральная ось описывает коническую поверхность. Вершина конуса лежит на оси трубопровода на уровне линии силового контакта манжеты со стенкой трубопровода.
На валу привода кругового качания закреплен эксцентрик, причем корпус выполнен в виде конической оболочки, в основании которой закреплена манжета, а носовая часть корпуса шарнирно связана поводком с эксцентриком.
Для компенсации вращающего момента от привода, устройство содержит парные корпусы с манжетами, соединенные с двумя соосными валами привода, которые вращаются в противоположных направлениях.
В транспортирующем трубопроводе, при наличии потока текучей среды, достаточно сформировать смещенную от оси трубопровода струю, и направив ее на край манжеты, перемещать по окружности трубопровода. Струя потока, воздействуя на манжету вблизи линии контакта с трубопроводом, продвигает часть кромки манжеты вперед, преодолевая силу трения. В следующий момент времени струя, переместившись по окружности трубопровода, передвигает смежную часть кромки манжеты. Описав полную окружность, струя последовательно передвигает все участки кромки манжеты.
При этом ось манжеты и связанного с ней корпуса описывает коническую поверхность с вершиной конуса, лежащей на оси трубопровода на уровне линии контакта.
Таким образом, в открытом и закрытом (транспортирующем) трубопроводах, тяговое усилие создается движителем, функции которого выполняются качающейся манжетой.
Реализация способа создания тягового усилия устройству, перемещаемому в трубопроводе, поясняется на чертежах:
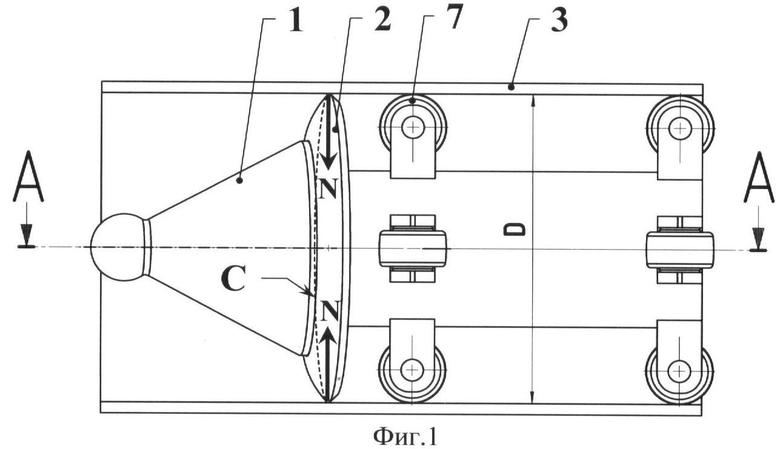
фиг.1 - общий вид устройства, реализующего способ перемещения в открытом трубопроводе;
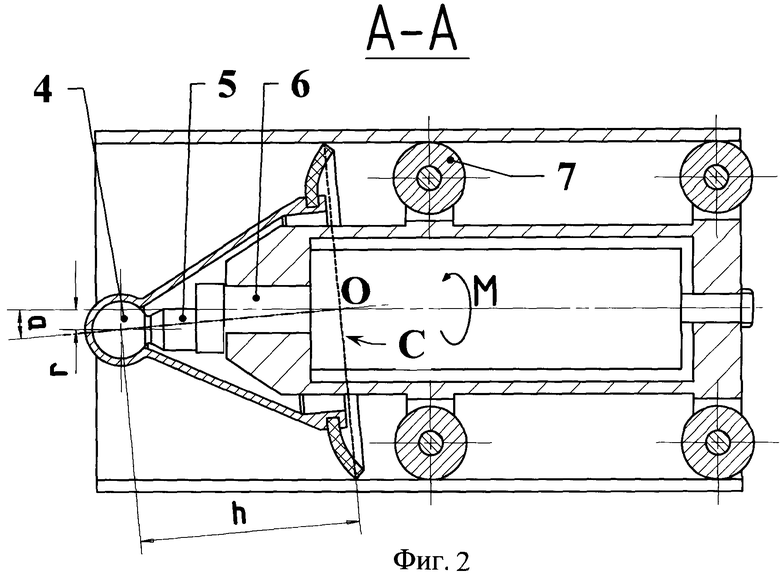
фиг.2 - разрез по АА;
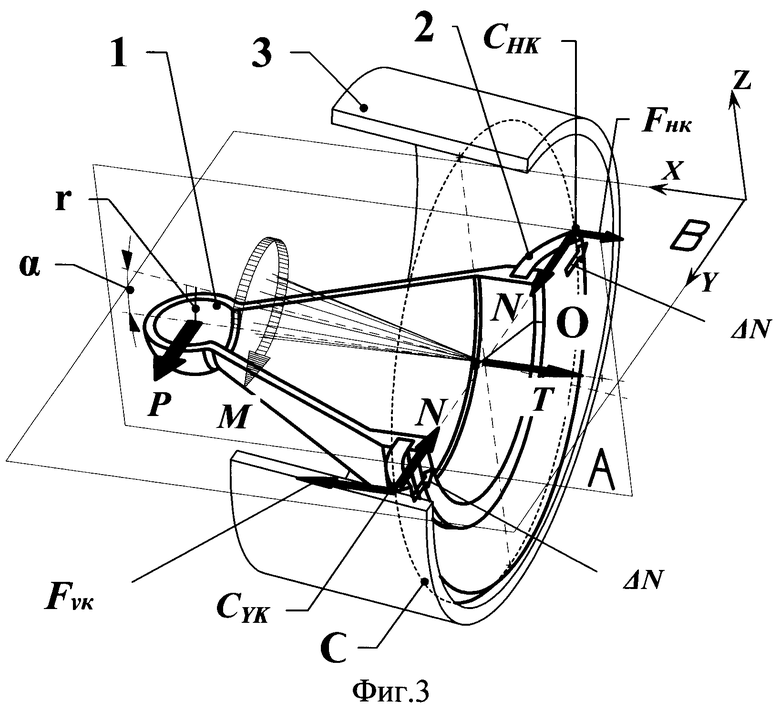
фиг.3 - схема сил, воздействующих на устройство в трубопроводе;
фиг.4 - схема сил, действующих в плоскости В;
фиг.5 - график зависимости осевой силы Т от крутящего момента М привода;
фиг.6 - последовательные положения устройства при полном повороте вала привода;
фиг.7 - цепочка устройств;
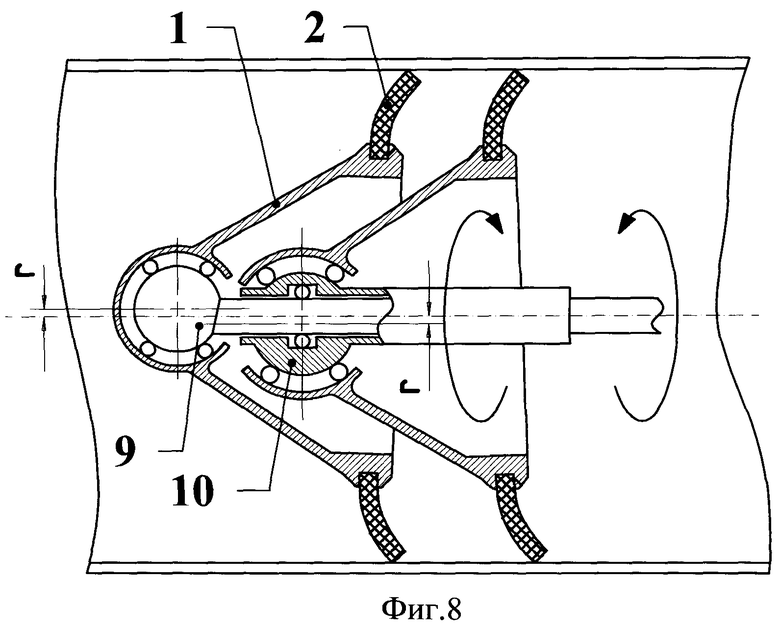
фиг.8 - спаренные устройства с противоположным вращением поводков;
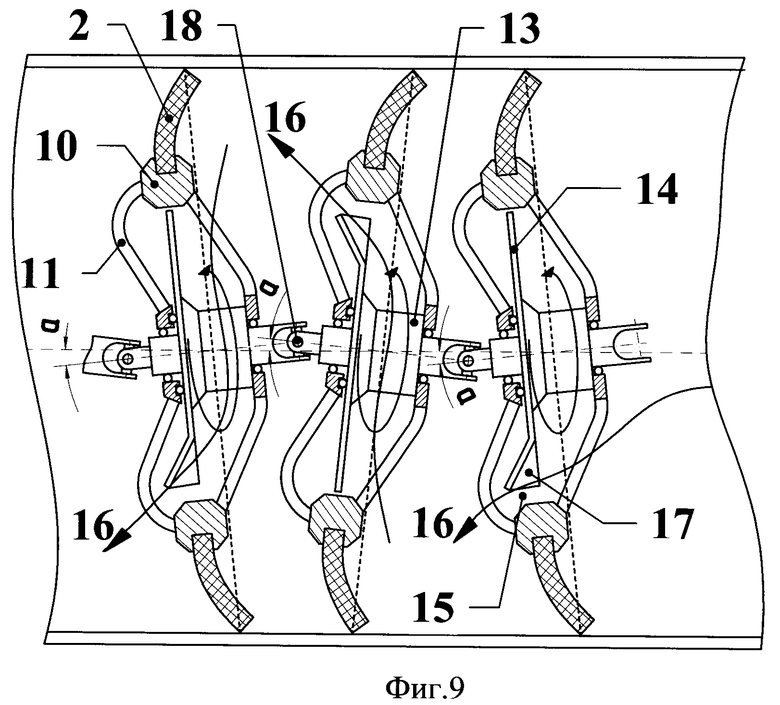
фиг.9 - цепочка устройств в транспортирующем трубопроводе.
1. Способ перемещения устройства в трубопроводе и устройство для реализации этого способа.
Способ включает силовое взаимодействие с внутренней поверхностью трубопровода элементов устройства, а именно - упругих манжет. Установленная в трубопровод 3 упругая полиуретановая манжета 2 обжимается по линии контакта С погонным усилием N (усилие на единицу длины контактной линии), действующим со стороны стенки трубопровода диаметром D (фиг.1). Манжета в трубопроводе приобретает чашеобразную форму.
Манжете придают качательные движения таким образом, что ее центральная ось описывает коническую поверхность с вершиной конуса, лежащей на оси трубопровода на уровне линии контакта.
Для реализации этого способа необходим силовой, например, электрический привод, возбуждающий качательные движения манжеты. Вал 6 привода (фиг.2), вращая эксцентрик 5 с эксцентриситетом r, отклоняет поводок 4 и шарнирно связанный с ним корпус 1 на угол α от оси трубопровода. Привод центрируется в трубопроводе опорными роликами 7. При вращении вала привода ось корпуса описывает коническую поверхность с вершиной в точке О и длиной образующей h. Точка О находится на оси трубопровода на уровне линии контакта С.
Момент М на валу привода действует с силой Р на корпус 1 (фиг.3). Сила Р лежит в плоскости В, связанной с осью корпуса. Угол α лежит в плоскости A, связанной с осью корпуса 1 и осью трубопровода. Плоскости А и В перпендикулярны.
Сила Р определяется по формуле

Для осевого смещения устройства в трубопроводе необходимо приложить силу T, превышающую силу трения манжеты о стенку трубопровода FTP. Величина силы Т определяется по формуле

где: f - коэффициент трения поверхности манжеты о стенку трубопровода;
N - погонное усилие обжатия манжеты в трубопроводе;
D - внутренний диаметр трубопровода.
Под действием силы Р корпус 1 стремится повернуться в плоскости В, при этом убегающая часть кромки манжеты CYK уходит назад (отрицательное направление оси X на фиг.3), а диаметрально противоположная (набегающая) часть кромки манжеты CHK уходит вперед.
Погонная сила радиального обжатия будет различной для диаметрально противоположных участков кромки манжеты CYK и CHK, что определяется из условия равновесия сил, действующих по оси Y. Величина разности погонного усилия радиального обжатия ΔN пропорциональна силе Р.
Погонная сила трения FHK на участке набегающей кромки манжеты CHK определяется уравнением

Погонная сила трения FYK на участок убегающей кромки манжеты CYK определяется уравнением

При этом, под воздействием силы Р, набегающая кромка проскальзывает в направлении движения устройства, а уходящая кромка тормозится.
На фиг.4 показана схема сил, действующих в плоскости В.
При действии боковой силы ΔР на малый участок набегающей кромки манжеты длиной ΔL будет действовать сила обжатия (N-ΔN)·ΔL, которая вызывает силу трения f·(N-ΔN)·ΔL. Аналогично на участок убегающей кромки действуют силы: прижима (N+ΔN)·ΔL и трения f·(N+ΔN)·ΔL.
Разность сил трения в точках CYK и CHK уравновешивается осевой силой ΔT.
Из равновесия моментов сил, действующих в плоскости В относительно точки CYK, следует:

Откуда:

Просуммируем это выражение по всем диаметрально противоположным участкам набегающей и убегающей кромок (последовательно вращаем плоскость В относительно оси трубы на угол от 0 до 180 градусов). Очевидно, получим следующее выражение для внешней осевой силы Т:

Учитывая, что  , а
, а  ;
;
можно записать выражение для осевой силы Т в зависимости от крутящего момента на валу привода:

График зависимости T от M показан на фиг.5. На этом графике величина обжатия N постоянна и определяется изменением геометрии манжеты при установке в трубопроводе.
Точка T1 на графике соответствует случаю, когда внешний крутящий момент отсутствует (т.е. M=0) и для проталкивания устройства необходимо приложить внешнюю силу. Таким образом, T1 определяется выражением:

Крутящий момент Mmin, который нужно приложить к устройству, чтобы оно начало двигаться в отсутствии внешней силы T (т.е. T=0), определяется из уравнений (8) и (2):

Если приложенный внешний момент превышает Mmin, то устройство начинает продвигаться, развивая силу тяги Т.
Под действием силы Т манжета дополнительно обжимается (расклинивается) в трубопроводе. При этом усилие обжатия пропорционально коэффициенту упругости манжеты на сжатие. Таким образом, при увеличении тягового усилия автоматически изменяется сила обжатия манжеты и, следовательно, сила трения манжеты о стенку трубопровода тоже увеличивается. Предельная величина силы тяги ограничена только силой, способной вывернуть манжету. На фиг.5 такая сила соответствует значению Tmax.
Движитель по заявке 951796 не может обеспечить достаточной тяги из-за того, что сложно реализовать достаточное усилие поджатия фрикционных роликов к стенке трубопровода. Поэтому в качестве движителя в предлагаемом устройстве использована упругая манжета. Развиваемое манжетой тяговое усилие может быть использовано для протягивания плети методом «труба в трубе».
Сила тяги будет больше при использовании вместо полиуретановой манжеты набора жестких подпружиненных стержней (см. описания к патентам РФ 2319059, 1741939, патенту США 6880195 В1).
В процессе движения устройства в трубопроводе плоскости А и В, связанные с его осью, вращаются (см. фиг.3). Точки CYK и CHK, лежащие в плоскости В, двигаются по спирали, показанной на фиг.6, диаметр которой равен внутреннему диаметру трубопровода D. Шаг спирали, соответствующий перемещению устройства вдоль оси трубопровода за один оборот эксцентрика, равен

где:
α - угол между осью устройства и осью трубопровода;
K - коэффициент пропорциональности, зависящий от жесткости материала манжеты и ее геометрии.
Перемещение контактной кромки манжеты всегда меньше перемещения жесткого корпуса 1 за счет упругих деформаций манжеты. Поэтому для коэффициента пропорциональности выполняется следующее неравенство:

Случай K=0 возможен при малом а и/или малой жесткости манжеты, когда качательные движения корпуса 1 не приводят к перемещению кромки манжеты.
Так как диск 1 с манжетой 2 не вращаются, а лишь получают качательные движения, то полиуретановая манжета имеет не меньший ресурс работы, что и поступательно движущаяся манжета на аппаратах, перемещаемых давлением в трубопроводах. Более того, за счет упругих деформаций, перемещается только участок (фронт перемещений) набегающей кромки. А участок убегающей кромки остается неподвижным относительно стенки трубопровода. Таким образом, ресурс кромки полиуретановой манжеты увеличивается из-за лучшего отвода тепла из зоны контакта с трубопроводом неподвижной части кромки.
При необходимости большего увеличения тяговых усилий устройства такого типа можно агрегатировать в последовательную цепочку (фиг.7).
При введении пластмассовых труб методом «труба в трубе», необходимо компенсировать вращающий момент от привода на устройство. Для этого целесообразно использовать пару устройств с противоположным направлением вращения поводков 9 и 10, соединенных с приводом через реверсирующий редуктор (фиг.8).
2. Способ перемещения устройства в транспортирующем трубопроводе и устройство для реализации этого способа.
При очистке и/или диагностике магистральных трубопроводов, транспортирующих под давлением текучий продукт (газ, нефть, вода и др.), нет необходимости в силовом вращающем приводе (электрическом, пневматическом и т.п.). Достаточно использовать движение потока в самом трубопроводе.
Так, если при прохождении зауженного участка трубопровода, устройство замедляет свое движение, то в потоке транспортируемого продукта за ним повышается давление. Этот прирост давления несложно преобразовать в увеличение частоты и/или амплитуды качательного движения манжеты, увеличивая тяговое усилие.
На фиг.9 показана цепочка устройств, реализующая струйный привод при наличии в трубопроводе потока текучей среды.
Каждое из устройств имеет корпус в виде пустотелой ступицы 11 с окнами для прохода текучей среды. На каждом корпусе закреплена манжета 2.
Внутри каждого корпуса установлен, с возможностью вращения, вал 13 с диском 14.
В диске имеется окно 15 для формирования смещенной от оси трубопровода струи 16 и лопасть 17, придающая вращение диску при проходе текучей среды.
Валы устройств соединены карданными шарнирами 18.
Струя воздействует на край манжеты расположенного впереди по потоку устройства и продвигает его вперед, отклоняя корпус на угол α. Воздействуя на лопасть 17, струя придает вращение дискам 14 и связанным с ними валам 13.
При вращении валов корпусы с манжетами описывают круговые качательные движения. При этом манжеты преодолевают силу трения, действующую только на набегающую часть кромки.
При замедлении движения устройства в узком месте трубопровода возрастает скорость струи, это вызывает рост амплитуды и частоты качательных движений, что приводит к увеличению силы тяги Т, позволяющей преодолеть сужение трубопровода без значительного повышения давления среды в трубопроводе.
При использовании предлагаемого устройства для очистки трубопровода, наличие струи текучей среды в полостях между манжетами способствует также эффективному уносу загрязнений, поднятых манжетами со стенок трубопровода.
Использование предложения позволит существенно расширить функциональные возможности внутритрубных самодвижущихся устройств, эффективнее выполнять работы по очистке, диагностике и ремонту как транспортирующих, так и открытых трубопроводов, в том числе трубопроводов в жилищно-коммунальном хозяйстве.
Источники информации
1. Патент RU 2319059 С2 10.03.2008, Бюл. №7.
2. Патент RU 2270955 С2 27.02.2006, Бюл. №6.
3. Патент SU 1548098 А1 07.03.90, Бюл. №9.
4. Патент US 6880195 В1 19.04.2005.
5. Патент SU 1741939 А1 30.05.1990, Бюл. №23.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ АППАРАТА ДЛЯ ВНУТРИТРУБНОГО ОБСЛЕДОВАНИЯ И АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2329432C1 |
| АППАРАТ ВНУТРИТРУБНОГО КОНТРОЛЯ И СПОСОБ ПЕРЕМЕЩЕНИЯ ЕГО В МАГИСТРАЛЬНОМ ГАЗОПРОВОДЕ С ЗАДАННОЙ РАВНОМЕРНОЙ СКОРОСТЬЮ | 2010 |
|
RU2451867C2 |
| ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ УСТРОЙСТВО И СПОСОБ ПЕРЕМЕЩЕНИЯ ЕГО В МАГИСТРАЛЬНОМ ТРУБОПРОВОДЕ С ЗАДАННОЙ РАВНОМЕРНОЙ СКОРОСТЬЮ | 2007 |
|
RU2334563C1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ВНУТРИТРУБНОГО ТРАНСПОРТНОГО СНАРЯДА В МАГИСТРАЛЬНОМ ТРУБОПРОВОДЕ С ЗАДАННОЙ РАВНОМЕРНОЙ СКОРОСТЬЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2393379C1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ВНУТРИТРУБНОГО ТРАНСПОРТНОГО СНАРЯДА В МАГИСТРАЛЬНОМ ТРУБОПРОВОДЕ С ЗАДАННОЙ РАВНОМЕРНОЙ СКОРОСТЬЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2369454C1 |
| ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2418234C1 |
| ВНУТРИТРУБНЫЙ МНОГОКАНАЛЬНЫЙ ПРОФИЛЕМЕР | 2000 |
|
RU2164661C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ТРУБОПРОВОДА | 2009 |
|
RU2390769C1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ВНУТРИТРУБНОГО УСТРОЙСТВА В ТЕХНОЛОГИЧЕСКОМ ТРУБОПРОВОДЕ | 2015 |
|
RU2596681C1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ВНУТРИТРУБНОГО ТРАНСПОРТНОГО СНАРЯДА В МАГИСТРАЛЬНОМ ТРУБОПРОВОДЕ С ПЛАВНО ИЗМЕНЯЮЩЕЙСЯ В ЗАДАННЫХ ПРЕДЕЛАХ СКОРОСТЬЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2393931C1 |
Изобретение относится к трубопроводному транспорту и может быть использовано в процессе работ по очистке, ремонту и диагностике различных по назначению трубопроводов. Способ перемещения устройства в трубопроводе, характеризующийся силовым взаимодействием устройства с трубопроводом, при котором устройству придают круговое распирающее усилие по контактирующей линии со стенкой трубопровода и производят круговые качательные движения таким образом, что его центральная ось описывает коническую поверхность с вершиной конуса, лежащей на оси трубопровода на уровне плоскости силового взаимодействия устройства со стенками трубопровода. Также заявлены 2 конструкции устройств для перемещения в трубопроводе. Технический результат изобретения заключается в расширении функциональных возможностей, упрощении способа создания и регулирования тягового усилия самодвижущихся внутритрубных устройств, а также упрощении конструкции таких устройств. 3 н. и 5 з.п. ф-лы, 9 ил.
1. Способ перемещения устройства в трубопроводе, характеризующийся силовым взаимодействием устройства с трубопроводом, при котором устройству придают круговое распирающее усилие по контактирующей линии со стенкой трубопровода и производят круговые качательные движения таким образом, что центральная ось устройства описывает коническую поверхность с вершиной конуса, лежащей на оси трубопровода на уровне контактирующей линии.
2. Способ по п.1, в котором величину тяги и/или скорость движения устройства в трубопроводе регулируют путем изменения частоты и/или амплитуды качательных движений.
3. Способ по п.1, в котором величину тяги и/или скорость движения устройства в трубопроводе увеличивают путем сочленения в последовательную цепочку двух или более устройств.
4. Способ по п.1, в котором сочлененным в цепочку парным устройствам придают противоположные направления качательного движения.
5. Устройство для перемещения в трубопроводе, включающее ряд последовательно соединенных в цепочку корпусных элементов в виде тел вращения, на каждом из которых закреплена упругая манжета, контактирующая кромкой со стенкой трубопровода и образующая в сжатом состоянии в канале трубопровода чашеобразную форму, в котором каждая из манжет использована в качестве движителя, а корпусы связаны с силовым, например, с пневматическим приводом кругового качательного движения, таким образом, что центральная ось каждого из них описывает коническую поверхность с вершиной конуса, лежащей на оси трубопровода на уровне силового контакта манжеты со стенкой трубопровода.
6. Устройство для перемещения в трубопроводе по п.5, в котором каждый из корпусов выполнен в виде конической оболочки, в основании которой закреплена манжета, а носовая часть корпуса шарнирно связана поводком с эксцентриком, закрепленным на валу привода кругового качательного движения.
7. Устройство для перемещения в трубопроводе по п.5, в котором корпусы соединены с силовым приводом попарно с возможностью кругового качательного движения в противоположном направлении.
8. Устройство для перемещения в транспортирующем трубопроводе, включающее ряд последовательно соединенных в цепочку корпусных элементов в виде тел вращения, на каждом из которых закреплена упругая манжета, образующая в сжатом состоянии в канале трубопровода чашеобразную форму, в котором каждая из манжет использована в качестве движителя, а корпусы последовательно соединены между собой карданными шарнирами, при этом каждый из корпусов выполнен в виде пустотелой ступицы с окнами перепуска текучего продукта и соединен с приводом кругового качательного движения таким образом, что центральная ось каждого из них описывает коническую поверхность с вершиной конуса, лежащей на оси трубопровода на уровне силового контакта манжеты со стенкой трубопровода, причем привод кругового качательного движения выполнен в виде диска, установленного в потоке жидкотекучего продукта с возможностью вращения в полости ступицы, а на краю диска напротив впереди по потоку расположенной манжеты имеется окно и установленная в нем лопасть для придания вращения диску при проходе текучей среды.
| СПОСОБ ВВЕДЕНИЯ ПЛЕТИ ПЛАСТМАССОВЫХ ТРУБ В ВОССТАНАВЛИВАЕМЫЙ НЕГЕРМЕТИЧНЫЙ ТРУБОПРОВОД И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2319059C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ АППАРАТА ДЛЯ ВНУТРИТРУБНОГО ОБСЛЕДОВАНИЯ ТРУБОПРОВОДОВ И АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2270955C2 |
| Устройство для перемещения в трубопроводе | 1988 |
|
SU1548098A1 |
| Устройство для очистки внутренней поверхности трубопровода | 1990 |
|
SU1741939A1 |
| US 6880195 B1, 19.04.2005. | |||

