Изобретение относится к способам неразрушающего контроля качества магистральных газопроводов, в частности к способам внутритрубной дефектоскопии газопроводов с помощью дефектоскопов-снарядов (см. «Техника и технология транспорта и хранения нефти и газа» под редакцией д.т.н. В.Ф.Новоселова, М., Недра, 1992, с.210).
Известен дефектоскоп-снаряд (патент RU №2109206 С1, кл. 6 F17D 5/00, В08В 9/04, 1998.04.20), содержащий электрически связанные между собой блоки источников излучения, блоки чувствительных элементов, систему управления, систему определения координат, систему обработки и регистрации информации и систему электропитания. Дефектоскоп-снаряд содержит механизм, состоящий из двух модулей с гидроприводом осевого возвратно-поступательного перемещения одного модуля относительно другого, каждый модуль имеет опорные органы с узлами их радиального перемещения для фиксации в трубопроводе, при этом один из модулей снабжен выполненным с возможностью вращения в потоке транспортируемого продукта аэродинамическим винтом, вал которого соединен с валом гидронасоса, связанного рабочими магистралями через электрогидроклапаны с гидроприводом осевого возвратно-поступательного перемещения одного модуля относительно другого, с гидроприводами вращения блоков чувствительных элементов, с гидроприводом вращения электрогенератора системы электропитания, с гидроприводами узлов радиального перемещения опорных органов.
Для обеспечения перемещения и фиксации внутри трубопровода известный дефектоскоп-снаряд снабжен опорными органами с узлами их радиального перемещения, которые, в зависимости от режима передвижения дефектоскопа-снаряда в трубопроводе, с помощью гидропривода, соединенного с гидронасосом, обеспечивают необходимое усилие прижима опорных поверхностей к внутренней поверхности трубопровода и, тем самым, необходимую скорость перемещения.
Способ перемещения известного дефектоскопа-снаряда в трубопроводе реализуется в двух режимах: шаговом и непрерывном.
Для организации шагового режима передвижения дефектоскопа-снаряда опорные органы выполнены в виде колес, снабженных тормозами мгновенного действия, например ленточными, с гидроприводом, связанным рабочими магистралями через электрогидроклапаны с гидронасосом, причем электрогидроклапаны в качестве исполнительных элементов включены в контур системы управления. При шаговом режиме попеременно закрепляется относительно газопровода один из модулей дефектоскопа, в то время как другой модуль, свободный от закрепления, выдвигается на шаг вперед или назад относительно закрепленного модуля.
Для организации непрерывного режима передвижения дефектоскопа-снаряда под действием потока транспортируемого продукта и возможности регулирования скорости передвижения на узлах радиального перемещения опорных колес закреплены кривошипно-кулисные механизмы, кулисы которых через кривошипы, установленные на осях опорных колес, связаны с поршнями регуляторов скорости, полости которых соединены между собой через ограничители расхода. Регулирование расхода рабочей жидкости между полостями регуляторов скорости позволяет изменять в необходимом интервале тормозное усилие опорных колес и, тем самым, регулировать скорость передвижения дефектоскопа-снаряда.
Недостатками данного устройства и способа его перемещения по трубопроводу являются:
- отсутствие в составе устройства системы регулирования скорости движения,
- сложность обеспечения герметичности узлов гидроприводов и аэродинамического винта при воздействии высокого давления транспортируемого продукта.
Известно внутритрубное транспортное средство с автономным источником питания (патент RU №2300046 С1, кл. F17D 5/00, 2007.05.27), содержащее корпус с удерживающими его по оси трубопровода опорными колесами, стойки которых шарнирно закреплены на корпусе и снабжены гидроцилиндрами для перемещения колес поперек поверхности трубопровода, и с аэродинамическим винтом, соединенным с электрогенератором, по меньшей мере, одно опорное колесо снабжено электроприводом, содержащим электродвигатель с редуктором, вал которого передачей соединен с валом червячной передачи, у которой червячное колесо жестко соединено с опорным колесом, при этом электродвигатель подключен к электрогенератору. Работа, создаваемая на аэродинамическом винте потоком транспортируемого продукта, с помощью электрогенератора преобразуется в электроэнергию и поступает на электропривод опорных колес. Излишки электроэнергии заряжают аккумулятор.
Способ перемещения известного транспортного средства в газопроводе заключается в том, что воздействуют опорными колесами, имеющими электропривод, на внутреннюю поверхность газопровода.
Недостатками известного транспортного средства и способа его перемещения по трубопроводу являются:
- отсутствие в составе устройства системы регулирования скорости движения,
- сложность обеспечения герметичности узлов гидроцилиндров, редуктора и аэродинамического винта при воздействии высокого давления магистрального газа,
- наличие большого количества кинематических устройств и передач, работающих в условиях воздействия механических примесей, содержащихся в магистральном газе.
Наиболее близким к заявляемому решению по количеству общих признаков является внутритрубное транспортное устройство и способ перемещения его в магистральном трубопроводе с заданной равномерной скоростью (патент RU №2334563 С1, кл. В08В 9/049, 2008.09.27).
Внутритрубное транспортное устройство содержит корпус, состоящий из ствола с закрепленными на нем перегородкой и полым силовым элементом, манжету из эластомера, движители, выполненные в виде колес с приводом, включающим конические гипоидные редукторы, упругие компенсирующие муфты, раздаточный цилиндрический редуктор, размещенный в полом силовом элементе, электрический мотор-генератор, и с электрическим аккумулятором, размещенным в отсеке корпуса. Устройство содержит также блок контроля и управления приводом, размещенный в отсеке корпуса, пружинный механизм прижатия колес к поверхности трубопровода, подпружиненные центрирующие колеса, утилизатор энергии, выполненный в виде электрического нагревателя, веерную заслонку с электромеханическим приводом, установленную на перегородку, для чего в ней выполнены окна, перекрываемые заслонкой, датчик скорости перемещения устройства по трубопроводу, кинематически сообщенный с раздаточным редуктором, а также датчик давления рабочей среды.
Способ перемещения устройства включает подачу потока рабочей среды к устройству, создание перепада давления рабочей среды на нем, перемещение его усилием, создаваемым перепадом давления, и осевым усилием, создаваемым движителями, приводимыми в движение электромеханическим приводом с электрическим аккумулятором при воздействии их на поверхность трубопровода, а также контролирование скорости перемещения устройства и восстановление до нормы величины скорости в случае отклонения ее величины от заданной и поддержание ее на заданном уровне. Корректирование величины скорости осуществляют регулированием величины перепада давления рабочей среды и непосредственно усилия, создаваемого перепадом, и включением привода движителей на один из режимов работы: «холостой» ход, двигательный и генераторный режимы. При недостаточности регулирующих воздействий на поток рабочей среды для восстановления величины скорости перемещения до заданной подключают привод на одном из режимов: двигательный - для ускорения устройства, генераторный - для торможения. На генераторном режиме осуществляют подзарядку аккумулятора. При полной зарядке аккумулятора энергия торможения направляется в утилизатор энергии, где в виде тепла рассеивается в потоке рабочей среды.
Недостатками известного транспортного средства и способа его перемещения по трубопроводу являются:
- сложность обеспечения герметичности кинематических устройств и передач при воздействии высокого давления магистрального газа,
- наличие большого количества кинематических устройств и передач, работающих в условиях воздействия механических примесей, содержащихся в магистральном газе,
- наличие манжеты, соприкасающейся с внутренней поверхностью трубопровода и нарушающей ее защитное покрытие,
- наличие зазоров и люфтов в кинематических устройствах и передачах, снижающее точность регулирования и поддержания заданной скорости,
- отсутствие системы определения координат.
Техническим результатом изобретения является устранение указанных недостатков.
Это достигается тем, что в аппарате внутритрубного контроля, содержащем гермоотсек, опирающийся на внутреннюю поверхность газопровода подпружиненными опорными элементами, выполненными в виде мотор-генератор-колес, размещенные снаружи и внутри гермоотсека, систему поиска дефектов, информационно-вычислительную систему, систему определения координат, систему регулирования скорости перемещения, систему электропитания с аккумуляторной батареей, датчик давления рабочей среды, каждое мотор-генератор-колесо выполнено с возможностью обеспечения тормозного, двигательного и пассивного режимов работы (и электрически соединено с системой регулирования скорости перемещения), а система регулирования скорости перемещения использует для регулирования скорости аппарата внутритрубного контроля информацию о скорости ротора мотор-генератор-колеса, получаемую с датчиков положения ротора.
Мотор-генератор колеса могут быть выполнены в безредукторном исполнении на базе низкооборотных высокомоментных синхронных машин с возбуждением от постоянных магнитов (например, патент RU №2311715 С1, кл. Н02К 19/02, 2007.11.27) либо в безредукторном исполнении на базе низкооборотных высокомоментных синхронных реактивных двигателей, причем каждое мотор-генератор-колесо снабжено блоком динамического торможения.
Мотор-генератор-колеса размещаются в модулях подвески, установленных на корпусе гермоотсека аппарата в двух разнесенных поясах, так, чтобы обеспечить устойчивость аппарата при его перемещении в газопроводе. Каждый модуль подвески развернут относительно продольной оси аппарата на угол 1°, что позволяет принудительно вращать аппарат во время его перемещения в газопроводе.
В каждом поясе могут быть установлены, например, по шесть модулей подвески, расположенных один относительно другого под углом 60°, в плоскости, перпендикулярной продольной оси аппарата. Причем каждый модуль подвески снабжен пружинным блоком, позволяющим удерживать продольную ось аппарата вдоль оси симметрии газопровода в процессе движения аппарата в газопроводе при изменении его диаметра и конфигурации. Конструкция пружинных блоков обеспечивает нелинейную характеристику их жесткости.
Аппарат осуществляет дефектоскопию стенок газопровода с помощью системы поиска дефектов, выполненной в виде узлов намагничивания стенок газопровода и магниточувствительных датчиков либо, например, в виде шести электромагнитно-акустических преобразователей.
Электромагнитно-акустические преобразователи закрепляются в каретках, установленных на пилонах, размещенных на гермоотсеке один относительно другого под углом 60°, в плоскости, перпендикулярной продольной оси аппарата.
Каретки с электромагнитно-акустическими преобразователями выполнены с возможностью обеспечения постоянного зазора между поверхностью электромагнитно-акустического преобразователя и внутренней поверхностью трубы газопровода.
Электромагнитно-акустические преобразователи выполнены комбинированными, имеющими два измерительных канала: дефектоскопический и толщинометрический.
Конфигурация информационно-вычислительной системы аппарата позволяет обеспечить прием, первичную обработку и запоминание измерительной информации, поступающей от системы поиска дефектов. Одновременно информационно-вычислительная система с помощью акселерометров формирует сигнал, содержащий информацию о фактической скорости перемещения аппарата, данные углового положения аппарата внутри газопровода, и фиксирует данные системы определения координат.
Система регулирования скорости перемещения аппарата управляет частотой вращения мотор-генератор-колес. Принцип регулирования частоты вращения (поддержания постоянной частоты вращения при изменении баланса сил, действующих на аппарат при его перемещении по газопроводу) может быть основан на измерении фазной ЭДС мотор-генератор-колеса, пропорциональной частоте его вращения, определяемой с помощью датчиков положения ротора мотор-генератор-колеса. В качестве датчиков положения ротора колеса могут быть применены, например, датчики Холла, размещаемые на статоре колеса. Оцифрованный сигнал частоты вращения колеса поступает на микроконтроллер, управляющий работой электронных ключей. Управляющий ключ работает, например, в режиме широтно-импульсной модуляции (ШИМ) напряжения, подаваемого на обмотки статора мотор-генератор-колеса.
Длительность открытого и закрытого состояния ключа характеризует величину сопротивления нагрузки. Скважность ШИМ характеризует величину тока нагрузки, определяющего величину тормозного момента в тормозном режиме работы колеса. Управляя этой величиной, система регулирования скорости перемещения аппарата поддерживает частоту вращения мотор-генератор-колес в заданном интервале, соответствующем заданной скорости перемещения аппарата по газопроводу.
Система определения координат также использует для определения координат аппарата сигналы с датчиков положения ротора мотор-генератор-колес. При известном диаметре мотор-генератор-колеса и измеренной частоте его вращения можно вычислить путь, пройденный каждым колесом в отдельности. Система определения координат формирует за определенный временной интервал усредненную величину пройденного аппаратом пути, используя данные всех мотор-генератор-колес, и преобразует эту величину в координаты пути аппарата.
Система электропитания предназначена для обеспечения:
- самоходного перемещения аппарата с помощью мотор-генератор-колес в двигательном режиме работы;
- питания системы поиска дефектов;
- подзарядки аккумуляторной батареи от мотор-генератор-колес в тормозном режиме работы.
Датчик давления рабочей среды предназначен для измерения давления газа в газопроводе и выдачи необходимых сигналов в систему регулирования скорости перемещения аппарата.
Способ перемещения аппарата внутритрубного контроля в магистральном газопроводе с заданной равномерной скоростью, включающий введение аппарата в камеру запуска (приема), замену воздуха в камере запуска (приема) на природный газ с выравниванием давления в камере запуска (приема) и в газопроводе, выдвижение аппарата из камеры запуска (приема) в линейную часть газопровода, воздействие на конструкцию аппарата, частично перекрывающую поперечное сечение газопровода, потока транспортируемого газа, перемещение аппарата по линейной части газопровода силой, создаваемой скоростным напором потока транспортируемого газа и осевым усилием, создаваемым воздействием мотор-генератор-колес на внутреннюю поверхность газопровода, подзарядку аккумулятора системы электропитания, контроль скорости перемещения аппарата, коррекцию скорости перемещения аппарата в случае отклонения ее величины от заданной, выдвижение аппарата из линейной части газопровода в камеру приема (запуска), включение и выключение аппарата в работу по наличию или отсутствию в газопроводе давления рабочей среды сверх заданного минимального уровня, состоит в том, что выдвижение аппарата из камеры запуска (приема) в линейную часть газопровода и выдвижение аппарата из линейной части газопровода в камеру приема (запуска) осуществляют с помощью мотор-генератор-колес, работающих в двигательном режиме от аккумулятора системы электропитания, перемещение аппарата по линейной части газопровода обеспечивают с минимальным поперечным смещением продольной оси аппарата относительно оси симметрии газопровода за счет пружинных блоков подвески мотор-генератор-колес, коррекцию скорости перемещения аппарата, в случае отклонения ее величины от заданной, осуществляют с помощью тормозного, двигательного и пассивного режимов работы мотор-генератор-колес, при независимом управлении каждого из мотор-генератор-колес в отдельности.
Сущность изобретения поясняется чертежами.
На фиг.1 изображен общий вид аппарата внутритрубного контроля, продольный разрез.
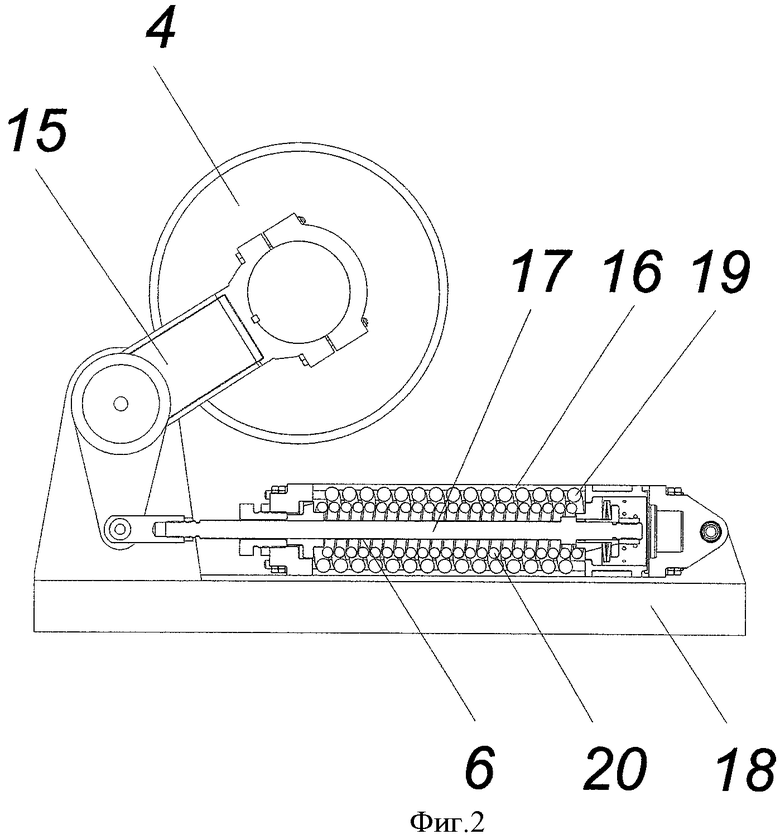
На фиг.2 изображен модуль подвески мотор-генератор-колес.
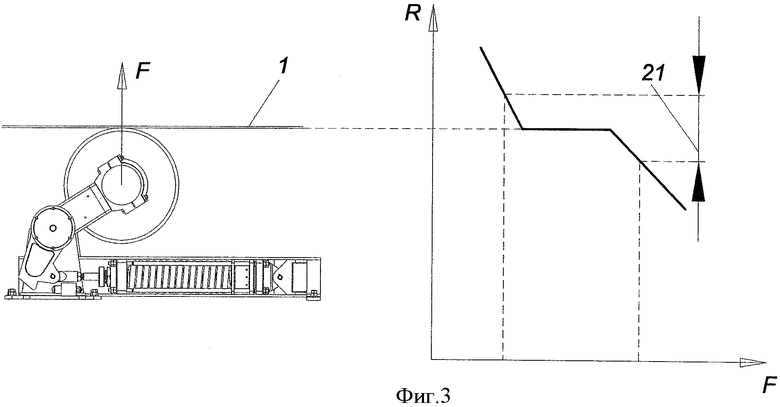
На фиг.3 изображен модуль подвески, передающий усилие прижима колеса F к стенке трубы 1.
Аппарат внутритрубного контроля, изображенный на фиг.1, перемещающийся внутри газопровода 1 по направлению 2, содержит гермоотсек 3; мотор-генератор-колеса 4, размещенные в модулях подвески 5, снабженных пружинными блоками 6; систему поиска дефектов 7, внешние элементы которой, выполненные в виде кареток 9 с электромагнитно-акустическими преобразователями, установлены на пилонах 8, крепящихся к гермоотсеку; информационно-вычислительную систему 10; систему определения координат 11; систему регулирования скорости перемещения 12; систему электропитания с аккумуляторной батареей 13; датчик давления рабочей среды 14.
Способ перемещения аппарата внутритрубного контроля по магистральному газопроводу с заданной равномерной скоростью осуществляется следующим образом.
Перед вводом аппарата в камеру запуска (приема) газопровода в систему регулирования скорости движения 12 вводится уставка, соответствующая задаваемой скорости перемещения аппарата, например (1±0,05) м/с.
Аппарат вводится в камеру запуска (приема). В камере запуска (приема) производится замена воздуха на природный газ, с выравниваем давления в камере (запуска) приема и в газопроводе.
При достижении заданного минимального давления рабочей среды в камере запуска (приема) срабатывает датчик давления 14 и по его сигналу подается электропитание на систему регулирования скорости перемещения аппарата 12. Через заданный интервал времени от таймера включается двигательный режим мотор-генератор-колес 4. Электропитание подается от аккумуляторной батареи системы электропитания 13. Аппарат выдвигается из камеры запуска (приема) в линейную часть газопровода.
Перемещение аппарата по линейной части газопровода осуществляется под действием осевых (направленных вдоль оси газопровода) сил:
- приложенной к аппарату силой сопротивления, создаваемой скоростным напором потока транспортируемого газа;
- силой, создаваемой воздействием мотор-генератор-колес 4 на внутреннюю поверхность газопровода;
- проекцией силы веса аппарата на продольную ось газопровода.
Проходное сечение перепускаемого через аппарат газового потока, определяющее продольную составляющую силы давления газового потока на аппарат, остается постоянным в процессе движения аппарата по газопроводу.
Из перечисленных осевых сил, воздействующих на аппарат, управляемой (контролируемой) является сила, создаваемая воздействием мотор-генератор-колес 4 на внутреннюю поверхность газопровода.
В процессе перемещения аппарата по линейной части газопровода акселерометры, входящие в состав информационно-вычислительной системы аппарата, выдают в систему регулирования скорости перемещения 12 сигнал, содержащий информацию о фактической скорости перемещения, углах поворота аппарата относительно продольной оси и углах поворота аппарата при прохождении криволинейных участков газопровода.
При нарушении условий, обеспечивающих постоянную скорость перемещения аппарата в газопроводе, т.е. при изменении баланса сил, действующих на аппарат, например, изменении скорости потока перекачиваемого газа или тормозящего усилия, вызываемого, например, изменением наклона трассы газопровода или повороте газопровода, происходит нарушение равенства между заданной и фактической скоростями перемещения аппарата. Вследствие этого в системе регулирования скорости перемещения 12 появляется сигнал рассогласования, полярность которого зависит от соотношения фактической и заданной величин скорости и условий движения аппарата, что позволяет регулировать скорость перемещения аппарата включением тормозного, двигательного или пассивного режимов работы каждого мотор-генератор-колеса 4 в отдельности.
Тормозной режим включается тогда, когда скорость аппарата, определяемая давлением перепускаемого через аппарат газового потока, превысит максимальную заданную скорость перемещения. Для повышения эффективности тормозного режима в мотор-генератор-колеса встроены блоки динамического торможения.
В тормозном режиме мотор-генератор-колеса 4 работают как генераторы, подавая электропитание на систему поиска дефектов 7 и одновременно подзаряжая аккумуляторную батарею системы электропитания 13.
Степень заряженности аккумуляторной батареи измеряется при помощи датчиков напряжения. При достижении максимально допустимого напряжения подзарядка аккумуляторной батарей отключается, при возникновении необходимости их заряда - снова подключается.
Двигательный режим включается тогда, когда скорость аппарата, определяемая давлением перепускаемого через аппарат газового потока, достигнет минимального заданного значения. В двигательном режиме мотор-генератор-колеса 4 работают как двигатели аппарата, получая питание от аккумуляторной батареи системы электропитания 13.
Пассивный режим включается при необходимости, в процессе регулирования скорости перемещения аппарата, перехода от двигательного режима к генераторному режиму или наоборот.
Независимое управление режимами работы каждого из мотор-генератор-колес 4 в отдельности обеспечивает перемещение аппарата по газопроводу без проскальзывания мотор-генератор-колес в том числе и на криволинейных участках газопровода. Например, при повороте газопровода мотор-генератор-колеса, двигающиеся вдоль внешнего (большего) радиуса поворота, должны вращаться с увеличенной частотой, а колеса, двигающиеся вдоль внутреннего (меньшего) радиуса поворота, должны вращаться с уменьшенной частотой.
Система регулирования скорости перемещения 12 отслеживает состояние параметров электропривода мотор-генератор-колес по показаниям датчиков положения ротора колеса и управляет коммутирующими элементами, переключающими режимы работы колес. Температура обмотки статора мотор-генератор-колес измеряется при помощи датчиков температуры (термопар).
В процессе перемещения аппарата по линейной части газопровода центральный процессор (ЦП) системы регулирования скорости перемещения непрерывно обрабатывает информацию о скорости каждого колеса и вычисляет действующее значение скорости аппарата (в том числе и на поворотах газопровода).
Перераспределяя с помощью сигналов управления ШИМ мощности каждого колеса, ЦП обеспечивает необходимую стабилизацию скорости перемещения аппарата и коррекцию скорости перемещения аппарата, в случае отклонения ее величины от заданной.
Модуль подвески мотор-генератор-колес, изображенный на фиг.2, содержит мотор-генератор-колесо 4, установленное на балансире 15, и пружинный блок 6. Пружинный блок 6 и балансир 15 с помощью шарнирных соединений закреплены на основании 18, которое крепится к гермоотсеку аппарата. Пружинный блок 6 состоит из корпуса пружинного блока 16, штока пружинного блока 17 и двух параллельных пружин разной жесткости: пружины большей жесткости 19 и пружины меньшей жесткости 20, установленных в корпусе блока.
На фиг.3 изображен модуль подвески, передающий усилие прижима колеса F к стенке трубы 1.
Сила F имеет нелинейную ступенчатую характеристику в зависимости от величины поперечного перемещения колеса R, что обеспечивается конструкцией пружинных блоков: при уменьшении величины R до номинальной величины, близкой к внутреннему радиусу трубы, к усилию пружины малой жесткости 20 подключается усилие пружины большой жесткости 19.
Это позволяет в пределах рабочего диапазона перемещений колеса:
- обеспечить необходимое усилие прижима опорных поверхностей (бандажей) колес к поверхности трубопровода для передачи необходимого осевого усилия мотор-генератор-колес;
- минимизировать поперечное смещение оси аппарата относительно оси трубопровода за счет нелинейной (ступенчатой) зависимости силы F от R;
- удерживать продольную ось аппарата вдоль оси трубы газопровода в процессе движения аппарата при изменении (в пределах диапазона 21) диаметра и конфигурации трубы.
По окончании перемещения по линейной части газопровода аппарат вводится в камеру приема (запуска) с помощью двигательного режима мотор-генератор-колес.
Давление газа в камере приема (запуска) сбрасывается. При достижении заданного минимального давления рабочей среды в камере запуска (приема) срабатывает датчик давления 14 и по его сигналу снимается электропитание с бортовых систем аппарата.
Как указывалось выше, дефектоскопия стенок газопровода может осуществляться с помощью блоков источников излучения и чувствительных элементов, выполненных, например, в виде узлов намагничивания стенок газопровода и магниточувствительных датчиков. В этом случае контроль стенок газопровода может проводиться в наведенном или в остаточном магнитных полях. Например, для контроля в наведенном магнитном поле блоки источников излучений представляют собой магнитную систему, намагничивающую стенки трубы до состояния насыщения, а поля рассеяния дефектов намагниченной стенки регистрируются с помощью чувствительных элементов, встроенных в магнитную систему и размещенных между ее полюсами.
В предлагаемом аппарате дефектоскопия стенок газопровода осуществляется с помощью блоков источников излучения и чувствительных элементов, выполненных виде комбинированных электромагнитно-акустических преобразователей, имеющих два измерительных канала: дефектоскопический и толщинометрический. Комбинированный электромагнитно-акустический преобразователь позволяет обнаруживать дефекты на наружной и внутренней поверхностях, а также внутренние дефекты стенки труб с одновременным измерением толщины стенки трубы.
Применение предлагаемого аппарата внутритрубного контроля позволит осуществить перемещение аппарата в магистральном газопроводе с заданной равномерной скоростью и поддержание ее величины с высокой точностью с помощью тормозного, двигательного и пассивного режимов работы мотор-генератор-колес, при независимом управлении каждого из мотор-генератор-колес в отдельности.
Предлагаемый способ перемещения аппарата и система поиска дефектов, построенная на применении метода дефектоскопии с использованием электромагнитно-акустических преобразователей, в совокупности позволяют повысить достоверность получаемых данных о дефектах стенки трубы.
Кроме этого, производительность газопровода в период проведения инспекции с применением предлагаемого аппарата практически сохраняется.
Мотор-генератор-колеса, являющиеся опорными элементами аппарата, обеспечивают движение качения по внутренней поверхности газопровода, что позволяет минимизировать степень воздействия на стенку трубы массы перемещающегося аппарата и использовать его для диагностики газопроводов, имеющих внутреннее защитное покрытие трубы.
Система электропитания аппарата, используя генераторный режим работы мотор-генератор-колес, обеспечивает повышенные энергетические потребности системы поиска дефектов с одновременным подзарядом аккумуляторной батареи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для внутренней дефектоскопии стенок трубопроводов | 2016 |
|
RU2619826C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ РЕЖИМА ДВИЖЕНИЯ ДИАГНОСТИЧЕСКОГО СНАРЯДА В ЭТАНОПРОВОДЕ | 2016 |
|
RU2644430C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ РЕЖИМА ДВИЖЕНИЯ ДИАГНОСТИЧЕСКОГО СНАРЯДА В ЭТАНОПРОВОДЕ | 2016 |
|
RU2644429C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ РЕЖИМА ДВИЖЕНИЯ ДИАГНОСТИЧЕСКОГО СНАРЯДА В ЭТАНОПРОВОДЕ | 2016 |
|
RU2644431C2 |
| ВНУТРИТРУБНЫЙ ДИАГНОСТИЧЕСКИЙ СНАРЯД С РЕГУЛИРУЕМОЙ СКОРОСТЬЮ ДВИЖЕНИЯ ДЛЯ ОБСЛЕДОВАНИЯ ТРУБОПРОВОДОВ | 2021 |
|
RU2779721C1 |
| СПОСОБ ВНУТРИТРУБНОЙ ДЕФЕКТОСКОПИИ И ДЕФЕКТОСКОП-СНАРЯД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2109206C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ АППАРАТА ДЛЯ ВНУТРИТРУБНОГО ОБСЛЕДОВАНИЯ ТРУБОПРОВОДОВ И АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2270955C2 |
| Способ проведения внутритрубной диагностики в подвижной жидкостной пробке | 2017 |
|
RU2650621C1 |
| ВНУТРИТРУБНЫЙ ДИАГНОСТИЧЕСКИЙ СНАРЯД ДЛЯ ГАЗОПРОВОДОВ | 2021 |
|
RU2773700C1 |
| СИСТЕМА ВНУТРИТРУБНОГО ОБСЛЕДОВАНИЯ ТРУБОПРОВОДОВ | 2004 |
|
RU2262036C1 |
Изобретение относится к области техники неразрушающего контроля и используется для дефектоскопии магистральных газопроводов в процессе их эксплуатации. Аппарат внутритрубного контроля содержит гермоотсек, опирающийся на внутреннюю поверхность газопровода подпружиненными опорными элементами, выполненными в виде мотор-генератор-колес, размещенные снаружи и внутри гермоотсека, систему поиска дефектов, информационно-вычислительную систему, систему определения координат, систему регулирования скорости перемещения, систему электропитания с аккумуляторной батареей, датчик давления рабочей среды. Каждое мотор-генератор-колесо выполнено с возможностью обеспечения тормозного, двигательного и пассивного режимов работы и электрически соединено с системой регулирования скорости перемещения. Система поиска дефектов может быть построена на основе использования электромагнитно-акустических преобразователей. Перемещение аппарата по линейной части газопровода обеспечивается с минимальным поперечным смещением продольной оси аппарата относительно оси симметрии газопровода за счет пружинных блоков подвески мотор-генератор-колес. Коррекция скорости перемещения аппарата, в случае отклонения ее величины от заданной, осуществляется с помощью тормозного, двигательного и пассивного режимов работы мотор-генератор-колес, при независимом управлении каждого из мотор-генератор-колес в отдельности. Использование изобретения обеспечит перемещение аппарата в газопроводе с заданной равномерной скоростью, обеспечивающей высокую точность и эффективность его работы. 2 н. и 9 з.п. ф-лы, 3 ил.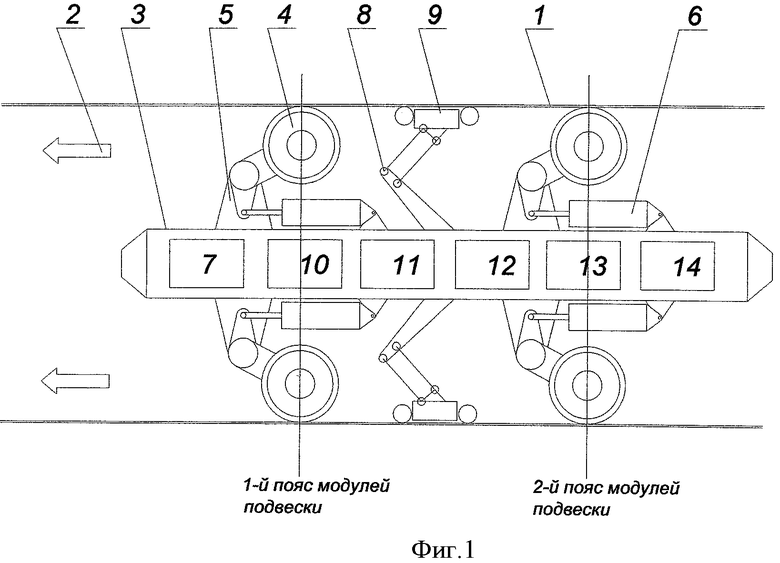
1. Аппарат внутритрубного контроля, содержащий гермоотсек, опирающийся на внутреннюю поверхность газопровода подпружиненными опорными элементами, выполненными в виде мотор-генератор-колес, размещенные снаружи и внутри гермоотсека, систему поиска дефектов, информационно-вычислительную систему, систему регулирования скорости перемещения, систему определения координат, систему электропитания с аккумуляторной батареей, датчик давления рабочей среды, отличающийся тем, что каждое мотор-генератор-колесо выполнено с возможностью обеспечения тормозного, двигательного и пассивного режимов работы, а система регулирования скорости перемещения использует для регулирования скорости аппарата внутритрубного контроля информацию о скоростях вращения роторов мотор-генератор-колес.
2. Аппарат внутритрубного контроля по п.1, отличающийся тем, что информация о скоростях роторов мотор-генератор-колес получается с датчиков положения роторов мотор-генератор-колес.
3. Аппарат внутритрубного контроля по п.1, отличающийся тем, что мотор-генератор-колеса выполнены в безредукторном исполнении на базе низкооборотных высокомоментных синхронных машин с возбуждением от постоянных магнитов, причем каждое мотор-генератор-колесо снабжено блоком динамического торможения.
4. Аппарат внутритрубного контроля по п.1, отличающийся тем, что мотор-генератор-колеса выполнены в безредукторном исполнении на базе низкооборотных высокомоментных синхронных реактивных двигателей, причем каждое мотор-генератор-колесо снабжено блоком динамического торможения.
5. Аппарат внутритрубного контроля по п.1, отличающийся тем, что мотор-генератор-колеса размещены в модулях подвески, установленных на корпусе гермоотсека аппарата в двух поясах, причем в каждом поясе установлены, например, шесть модулей подвески, расположенных один относительно другого под углом 60°, в плоскости, перпендикулярной продольной оси аппарата.
6. Аппарат внутритрубного контроля по п.5, отличающийся тем, что каждый модуль подвески снабжен пружинным блоком, имеющим нелинейную характеристику жесткости.
7. Аппарат внутритрубного контроля по п.1, отличающийся тем, что система поиска дефектов выполнена, например, в виде узлов намагничивания стенок газопровода и магниточувствительных датчиков.
8. Аппарат внутритрубного контроля по п.1, отличающийся тем, что система поиска дефектов выполнена, например, в виде шести электромагнитно-акустических преобразователей, закрепленных в каретках, установленных на пилонах, размещенных на корпусе гермоотсека аппарата один относительно другого под углом 60°, в плоскости, перпендикулярной продольной оси аппарата.
9. Аппарат внутритрубного контроля по п.8, отличающийся тем, что каретки с электромагнитно-акустическими преобразователями выполнены с возможностью обеспечения постоянного зазора между поверхностью электромагнитно-акустического преобразователя и внутренней поверхностью трубы газопровода.
10. Аппарат внутритрубного контроля по п.8, отличающийся тем, что электромагнитно-акустические преобразователи выполнены комбинированными, содержащими, например, два измерительных канала, дефектоскопический и толщинометрический.
11. Способ перемещения аппарата внутритрубного контроля в магистральном газопроводе с заданной равномерной скоростью, включающий введение аппарата в камеру запуска (приема), замену воздуха в камере запуска (приема) на природный газ с выравниванием давления в камере запуска (приема) и в газопроводе, выдвижение аппарата из камеры запуска (приема) в линейную часть газопровода, воздействие на конструкцию аппарата, частично перекрывающую поперечное сечение газопровода, потока транспортируемого газа, перемещение аппарата по линейной части газопровода усилием, создаваемым перепадом давления потока транспортируемого газа и осевым усилием, создаваемым воздействием мотор-генератор-колес на внутреннюю поверхность газопровода, подзарядку аккумуляторной батареи системы электропитания, контроль скорости перемещения аппарата, коррекцию скорости перемещения аппарата в случае отклонения ее величины от заданной, выдвижение аппарата из линейной части газопровода в камеру приема (запуска), включение и выключение аппарата в работу по наличию или отсутствию в газопроводе давления рабочей среды сверх заданного минимального уровня, отличающийся тем, что выдвижение аппарата из камеры запуска (приема) в линейную часть газопровода и выдвижение аппарата из линейной части газопровода в камеру приема (запуска) осуществляют с помощью мотор-генератор-колес, работающих в двигательном режиме от аккумулятора системы электропитания, перемещение аппарата по линейной части газопровода обеспечивают с минимальным поперечным смещением продольной оси аппарата относительно оси симметрии газопровода за счет пружинных блоков подвески мотор-генератор-колес, коррекцию скорости перемещения аппарата, в случае отклонения ее величины от заданной, осуществляют с помощью тормозного, двигательного и пассивного режимов работы мотор-генератор-колес, при независимом управлении каждого из мотор-генератор-колес.
| ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ УСТРОЙСТВО И СПОСОБ ПЕРЕМЕЩЕНИЯ ЕГО В МАГИСТРАЛЬНОМ ТРУБОПРОВОДЕ С ЗАДАННОЙ РАВНОМЕРНОЙ СКОРОСТЬЮ | 2007 |
|
RU2334563C1 |
| RU 2008103867 A, 10.08.2009 | |||
| Способ горячего ремонта алюминиевой электролитной ванны | 1939 |
|
SU56553A1 |
| Астролябия | 1941 |
|
SU66622A1 |
| US 5208936 A, 11.05.1993. | |||

