Настоящее изобретение относится к способу и установке для забивания сваи в подводную подстилающую породу, такую как морское дно.
Известно, что для обеспечения направляющих свай для подводной забивки свай имеется ряд направляющих свай, смотрите, например, продукцию компании Sea Steel Ltd, как описано в публикациях WO 99/11872 (Направляющая сваи с прочным каркасом), WO 01/92645 (Направляющая сваи с ребристым каркасом/следящим механизмом) и WO 03/074795 (Направляющая сваи с контролем ориентации). С такими направляющими свай сваи можно забивать в морское дно, используя гидравлические молоты, такие как гидромолоты IHC, поставляемые голландской компанией IHC Hydrohammer BV. Однако до настоящего времени не было возможности эффективно или экономно управлять молотами на глубине свыше приблизительно 500 метров ниже уровня моря по нескольким причинам. Если источник энергии для гидравлического молота находится на поверхности, длина гидравлического (составного) шланга, требуемая для достижения морского дна, становится проблематичной вследствие веса и потерь на трение, и для такого шланга требуется большая грузоподъемность лебедки. Если источник энергии для гидравлического молота находится на морском дне или около него, возникают другие проблемы. Например, обеспечение источника энергии "кольцевого" типа, подсоединенного к молоту, производит сборку, которая является - в практических условиях - слишком большой для прохождения через существующие направляющие свай. Такой источник энергии известен из патента США №4817734. Также обеспечение источника энергии "контейнерного" типа, который независимо расположен на морском дне, вызывает дополнительную работу во время начального развертывания, при переносе на морское дно и во время последующего подъема на борт.
В настоящем изобретении решаются проблемы, связанные с забиванием свай на глубинах свыше 500 метров ниже уровня моря, и предложено новое решение, применимое к подводному забиванию свай на любой глубине.
В соответствии с первым аспектом настоящего изобретения предложена установка для забивания сваи в морское дно, содержащая направляющую сваи, содержащую несущую раму и направляющий элемент, установленный на несущей раме, причем направляющий элемент выполнен с возможностью направления сваи по мере того, как ее забивают в подстилающую породу, когда несущая рама опирается на нее; устройство для забивания сваи в морское дно и источник энергии для обеспечения энергии и приведения в действие этого устройства, отличающееся тем, что несущая рама направляющей сваи образует платформу, выполненную так, чтобы нести устройство и источник энергии, когда направляющую сваи перемещают в положение для забивания свай.
Настоящее изобретение использует направляющую сваи не только для того, чтобы поддерживать и/или выравнивать сваи во время забивания свай, но также и как единую сборку платформы для несения основного оборудования, требуемого для выполнения этой задачи. Таким образом, настоящее изобретение делает возможным уменьшение или даже исключение обычного требования извлечения устройства (и периферийного оборудования) на поверхность между монтажами. Оно также делает возможным развертывать направляющую сваи, устройство и источник энергии в виде единой сборки.
Устройство может быть гидравлическим молотом для забивания свай в подстилающую породу через повторяющиеся удары. В качестве альтернативы, устройство может быть всасывающим насосом для забивания всасывающих свай или кессонных свай в подстилающую породу через перепад давления. Платформа может включать в себя средство (например, столб) для поддерживания устройства, когда оно присоединено к ней. Это средство может быть выполнено так, чтобы поддерживать устройство в предварительно заданной ориентации, когда оно присоединено к ней.
Источник энергии может обеспечивать механическую или электрическую энергию (например, для приведения в действие блока гидравлической энергии) или может даже обеспечивать гидравлическую энергию непосредственно для устройства (например, гидравлического молота или всасывающего насоса). Гидравлическая энергия может обеспечиваться через шланг во время забивания сваи. Шланг только должен иметь длину, достаточную для осуществления связи между источником энергии и устройством во время забивания свай. Устройство может включать в себя выступающий рычаг для направления шланга к одной боковой стороне устройства.
Источник энергии может быть частью средства передвижения с дистанционным управлением (например, СПДУ) или даже рабочего средства передвижения с дистанционным управлением (РСПДУ), съемным образом устанавливаемого на платформе направляющей сваи. Таким образом, средство передвижения с дистанционным управлением может использоваться для выполнения осмотров между забиваниями свай. Когда средство передвижения с дистанционным управлением устанавливается на платформе, оно может быть выполнено так, чтобы обеспечивать опору для контроля ориентации направляющей сваи во время развертывания. Платформа направляющей сваи может включать в себя установочную станцию для повторяемого прикрепления/отделения от нее средства передвижения с дистанционным управлением. Установочная станция может иметь панель сопряжения, выполненную так, чтобы принимать энергию от средства передвижения с дистанционным управлением, когда оно прикреплено к установочной станции. Средство передвижения с дистанционным управлением и панель сопряжения могут включать в себя сопряженные соединители (например, так называемый "штыревой разъем" и "штепсельную розетку") для осуществления связи между источником энергии и панелью сопряжения. Соединители могут автоматически зацепляться сопряженным образом, когда средство передвижения с дистанционным управлением прикрепляют к установочной станции.
В соответствии со вторым аспектом настоящего изобретения предложен способ забивания сваи в подводную подстилающую породу (например, морское дно), при котором: обеспечивают установку, как определено в соответствии с первым аспектом настоящего изобретения; размещают установку на подводной подстилающей породе; размещают сваю в направляющем элементе сваи; перемещают устройство от платформы несущей рамы для зацепления сваи и осуществляют забивание сваи в подстилающую породу, используя источник энергии для приведения в действие устройства.
Способ может дополнительно содержать хранение устройства забивания на платформе несущей рамы после того, как свая была забита в подстилающую породу, и до того, как новая свая будет забиваться в подстилающую породу. Устройство можно перемещать между его положением покоя (на платформе несущей рамы) и его рабочим положением (на свае в направляющем элементе сваи) с помощью крана над уровнем воды. Кран также можно использовать для того, чтобы поднимать и опускать направляющую сваи и размещать сваю в направляющем элементе сваи. Устройство может быть гидравлическим молотом или всасывающим насосом, где сваи являются соответственно обычными сваями или всасывающими сваями.
Источник энергии может быть частью средства передвижения с дистанционным управлением (например, СПДУ) или даже рабочего средства передвижения с дистанционным управлением (РСПДУ), съемным образом устанавливаемого на платформе направляющей сваи. Способ может дополнительно содержать отделение средства передвижения с дистанционным управлением от платформы несущей рамы, чтобы выполнять задачу, связанную с забиванием сваи. Задача может быть выбрана из группы, состоящей из: проверки сваи в направляющем элементе сваи; разъединения крепежных деталей, прикрепляющих устройство к несущей раме; подсоединения устройства к подъемному средству (например, крану на поверхности); проверки зацепления между устройством и сваей; проверки сваи, как только она забита в подстилающую породу; и подсоединения направляющей сваи к подъемному средству (например, крану на поверхности). Платформа несущей рамы может включать в себя установочную станцию для повторного прикрепления средства передвижения с дистанционным управлением к платформе, как только одна или когда каждая задача завершена. Установочная станция может иметь панель сопряжения, выполненную так, чтобы принимать энергию от средства передвижения с дистанционным управлением, когда оно прикреплено к установочной станции. Средство передвижения с дистанционным управлением и панель сопряжения могут включать в себя сопряженные соединители для сообщения энергии от первого к последнему. Сопряженное зацепление соединителей может быть установлено посредством повторного прикрепления средства передвижения с дистанционным управлением к платформе через установочную станцию.
Способ может дополнительно содержать использование средства передвижения с дистанционным управлением, чтобы обеспечивать опору для контроля ориентации направляющей сваи и ее размещения во время развертывания.
Способ может дополнительно содержать контролирование ориентации устройства относительно сваи в направляющем элементе сваи при зацеплении сваи. Такой контроль может помогать исключать какое-либо запутывание гидравлического шланга (обеспечивающего гидравлическую энергию для устройства) вокруг сваи или направляющего элемента сваи.
Ниже будут описаны варианты осуществления изобретения посредством примера со ссылкой на следующие чертежи, где:
на фиг.1 показан вид сбоку установки, воплощающей настоящее изобретение, выполненной с возможностью забивания сваи в подстилающую породу;
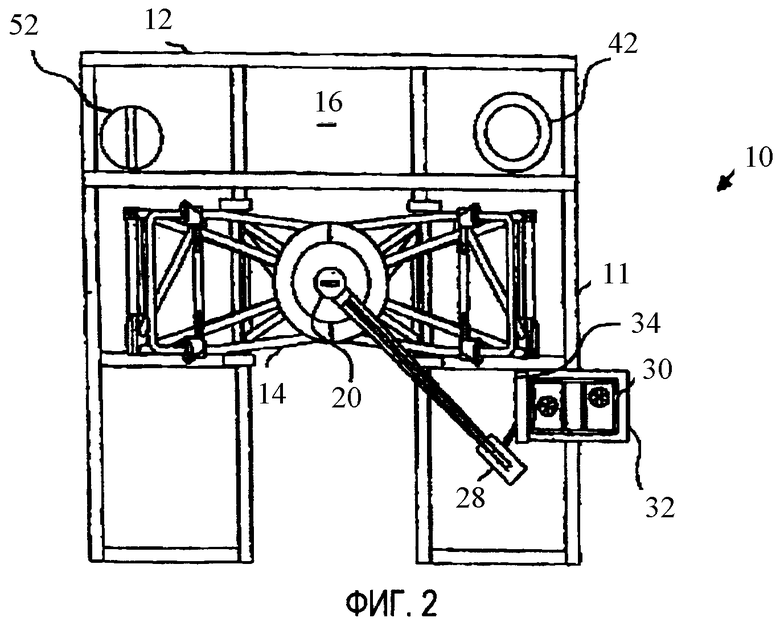
на фиг.2 - вид сверху установки по фиг.1, выполненной с возможностью забивания сваи в подстилающую породу;
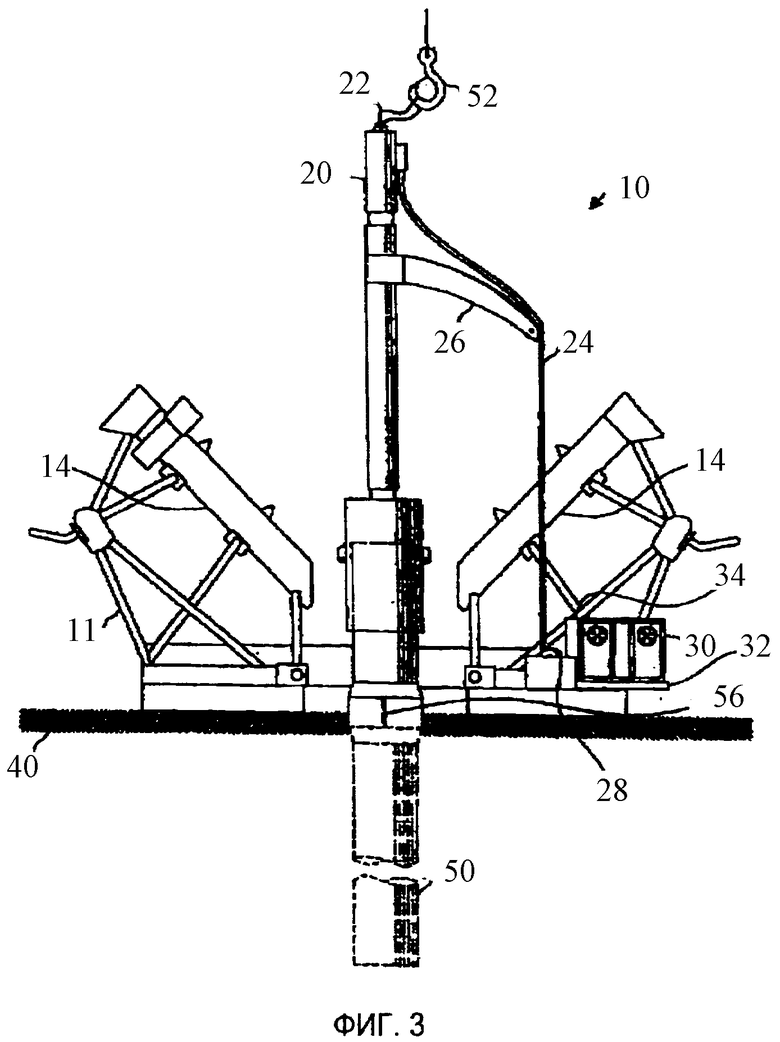
на фиг.3 - вид сбоку установки на фиг.1, когда свая забита в подстилающую породу;
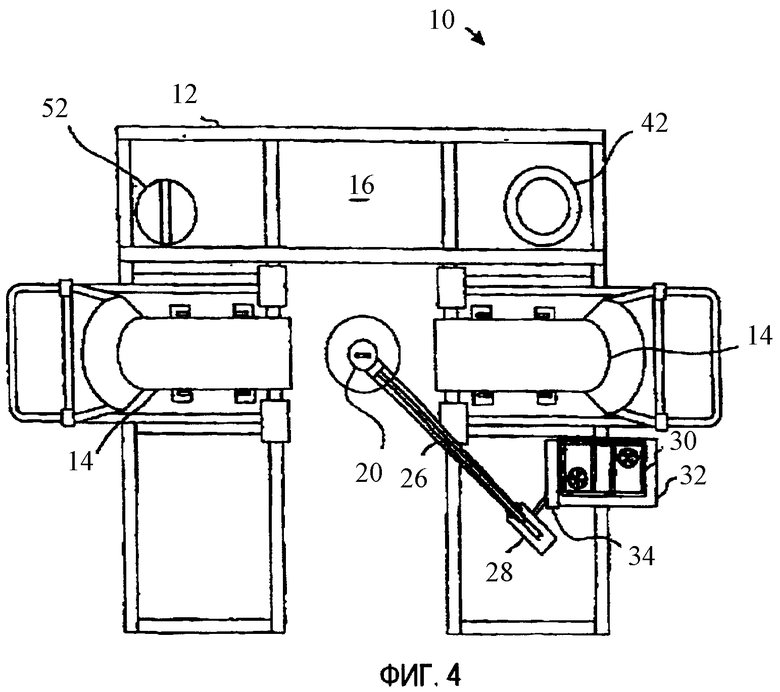
на фиг.4 - вид сверху установки на фиг.1, когда свая забита в подстилающую породу;
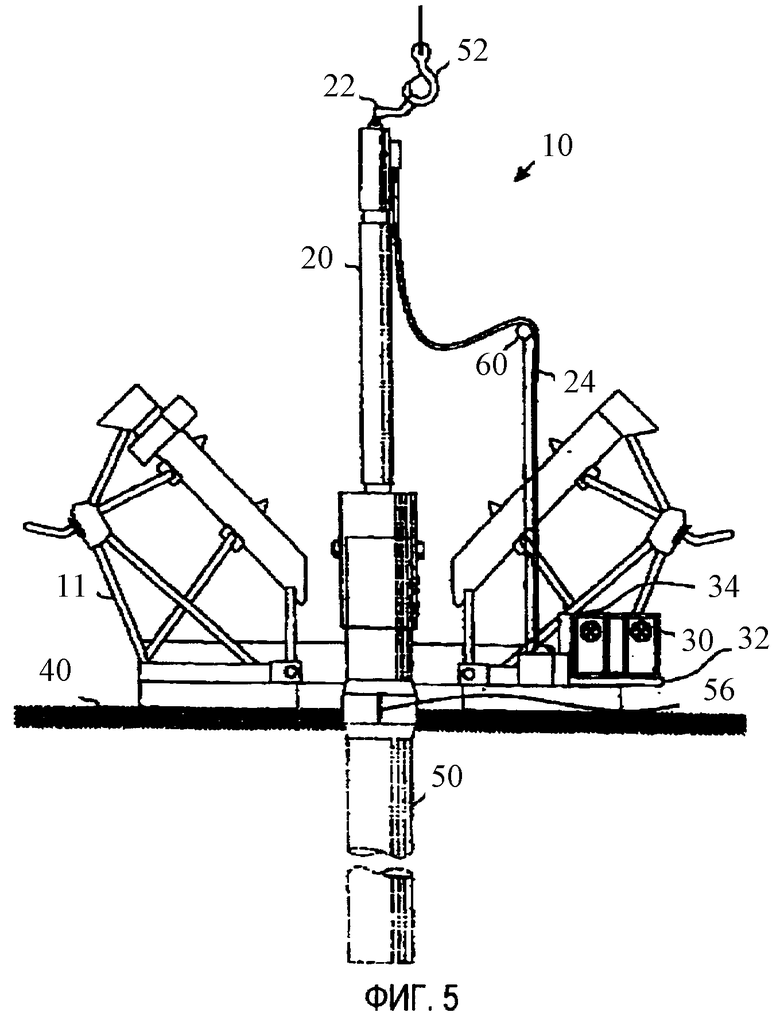
на фиг.5 - вид сбоку альтернативной установки, воплощающей настоящее изобретение (показан со сваей, уже забитой в подстилающую породу);
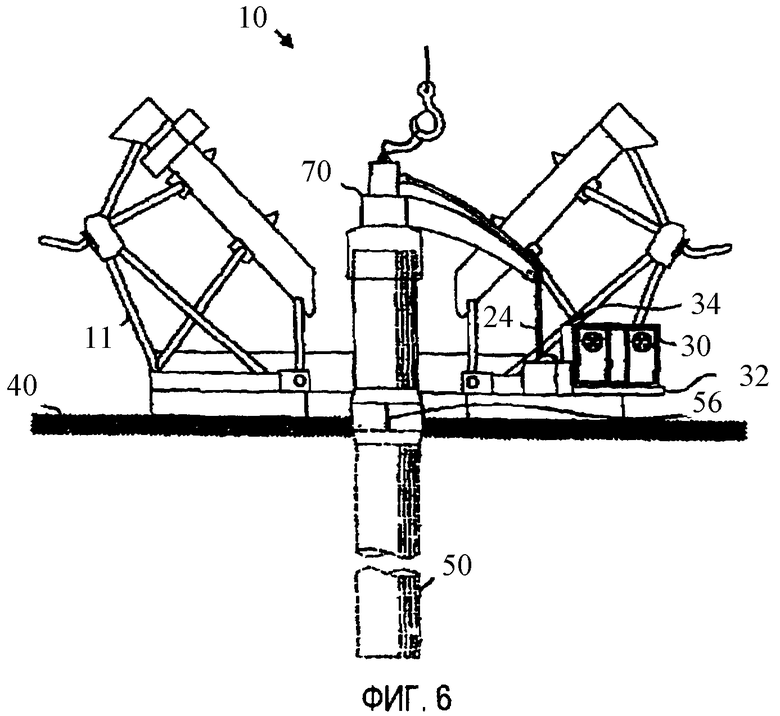
на фиг.6 - вид сбоку другой установки, воплощающей настоящее изобретение (снова показан со сваей, уже забитой в подстилающую породу);
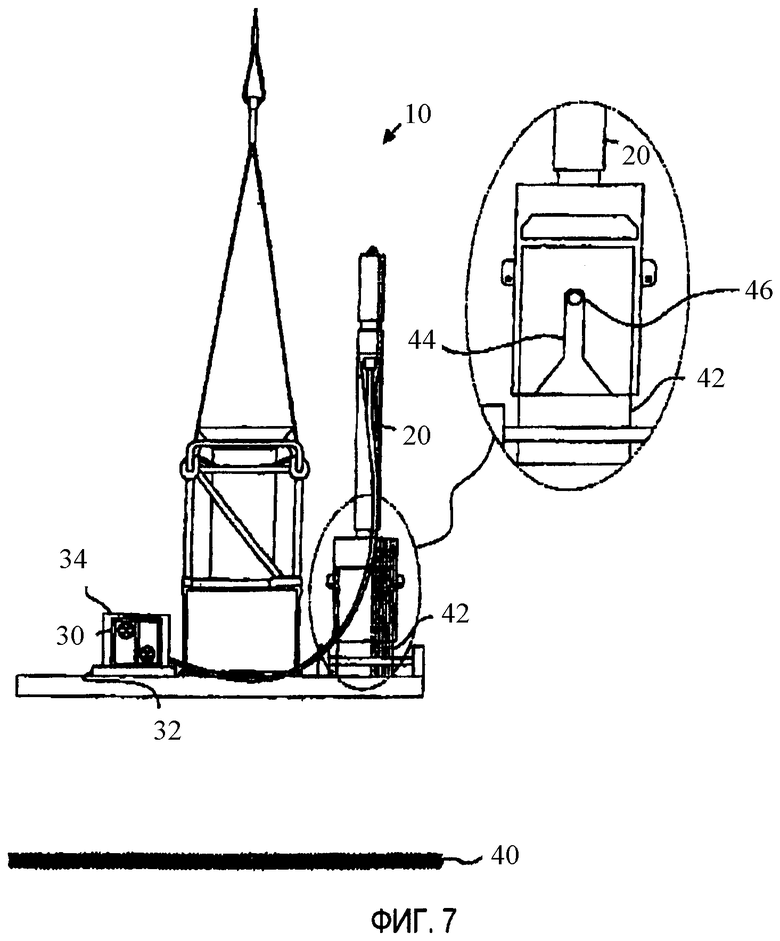
на фиг.7 - вид спереди установки на фиг.1, когда ее разворачивают; и
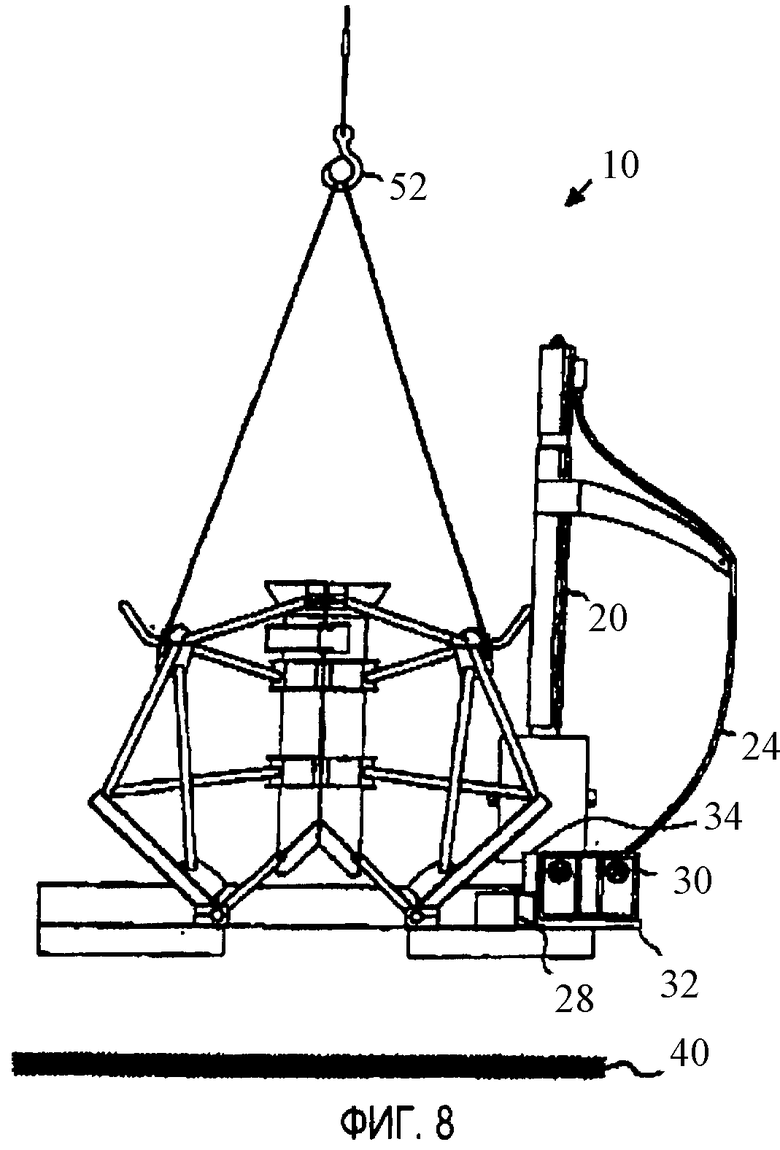
на фиг.8 - вид сбоку установки на фиг.1, когда ее разворачивают.
На фиг.1-4 показана установка (10), воплощающая настоящее изобретение и содержащая направляющую (11) сваи, гидравлическое устройство (20) в виде молота и источник (30) энергии в виде рабочего средства передвижения с дистанционным управлением (РСПДУ). Направляющая (11) сваи имеет несущую раму (12) и направляющий элемент (14), установленный на несущей раме (12) с возможностью направления сваи по мере того, как ее забивают в подстилающую породу. На всех чертежах направляющая (11) сваи показана так, как описано в публикации WO 99/11872, на которую делается ссылка для разъяснения принципов ее работы. Несущая рама (12) образует по существу прямоугольную платформу (16), чтобы нести гидравлический молот (20) и РСПДУ (30), когда направляющую (11) сваи перемещают в положение, например, на морском дне (40). На фиг.7 и 8 показаны гидравлический молот (20) и РСПДУ (30), переносимые на платформе (16).
Гидравлический молот (20), такой как гидромолот IHC, обеспечиваемый компанией IHC Hydrohammer BV, первоначально прикреплен к столбу (42) для хранения, выступающему из платформы (16) направляющей (11) сваи. Гидравлический молот (20) включает в себя подъемную петлю (22), которую можно зацеплять крюком крана, когда приходит время поднимать гидравлический молот (20) относительно направляющей (11) сваи. Гидравлический молот (20) имеет шланг (24) для подачи в него рабочей жидкости. Шланг (24) прикреплен к рычагу (26), который выступает из гидравлического молота (20) для предотвращения его загрязнения/повреждения во время забивания сваи. Шланг (24) присоединен к устройству (28) намотки, которое убирает провисание в шланге (24) во время забивания свай. Молот (20) имеет контур (44) для зацепления реперного штифта (46) на столбе (42) для хранения сваи таким образом, чтобы рычаг (26) был выровнен в предварительно заданной ориентации относительно направляющей (11) сваи.
РСПДУ (30) первоначально зацеплено и установлено на установочной станции (32) на платформе (16) направляющей (11) сваи. РСПДУ (30) установлено таким образом, что оно способно обеспечивать опору для контроля ориентации направляющей (11) сваи во время развертывания. РСПДУ (30) может быть разъединено с установочной станцией для обеспечения возможности производить проверки до и после процессов забивания сваи. Установочная станция (32) включает в себя панель (34) сопряжения, причем панель (34) сопряжения и РСПДУ (30) имеют сопряженные соединители, которые автоматически зацепляются при стыковке РСПДУ (30) с установочной станцией (32). Когда РСПДУ (30) установлено на установочной станции, оно будет обеспечивать гидравлическую энергию для приведения в действие гидравлического молота (20) через шланг (24).
Ниже будет описана типичная процедура подводного монтажа сваи, чтобы проиллюстрировать использование установки (10), воплощающей настоящее изобретение.
(1) Установка (10) развернута к морскому дну (40), причем гидравлический молот (20) и РСПДУ (30) прикреплены к платформе (16) направляющей (11) сваи, как описано выше. РСПДУ (30) управляется через составной шланг, который разматывается с поверхности по мере того, как развертывается установка (10).
(2) На морском дне (40) выясняется и регулируется ориентация направляющей (11) сваи относительно морского дна (40), если требуется, с использованием опоры, обеспечиваемой РСПДУ (30).
(3) Как только направляющая (11) сваи установлена на месте на морском дне (40), первую сваю (50) развертывают в направляющем элементе (14) направляющей (11) сваи. Ориентация, или "направление движения" сваи (50) относительно направляющей (11) сваи контролируется (например, с использованием способа, описанного в WO 03/074795) таким образом, чтобы планка с обухом и страховочный фал (56) были выровнены предварительно определенным образом. Инструмент (52) подъема сваи может находиться "влажным" в резерве на направляющей (11) сваи, готовым к использованию снова, как только направляющая (11) сваи будет перемещена в новое местоположение и потребуется развертывать новую сваю (50').
(4) РСПДУ (30) отсоединяют от установочной станции (32) и используют для проверки расположения сваи (50) в направляющем элементе (14). Если все удовлетворительно, РСПДУ (30) используется для отсоединения гидравлического молота (20) от столба (42) для хранения на платформе (16) и прикрепления крюка (52) крана к подъемной петле (22).
(5) Гидравлический молот (20) поднимают на сваю (50), причем контур (44) зацепляет реперный штифт (не показан) на свае (50) для обеспечения достижения гидравлическим молотом предварительно заданной ориентации относительно направляющей (11) сваи. Таким образом, рычаг (26) обращен к устройству (28) намотки. РСПДУ (30) используют для подсоединения шланга (24) - вместе с какими-либо шинами управления - к устройству (28) намотки через сопряженные соединители, например штыревые разъемы (не показаны).
(6) РСПДУ (30) возвращают на установочную станцию так, чтобы оно могло поставлять рабочую жидкость для молота (20) через шланг (24).
(7) Гидравлический молот (20) используют для забивания сваи (50) в морское дно (40).
(8) Когда забивание завершено (как определяется проверкой с РСПДУ (30) или вспомогательного РСПДУ, используемого для подтверждения), молот (20) поднимают и убирают на хранение на платформу (16) направляющей (11) сваи без отсоединения шланга (24).
(9) Направляющую (11) сваи полностью поднимают с морского дна (40) - но нет никакой необходимости поднимать ее на поверхность, если только забивка сваи в этой области не завершена - и перемещают в соседнее место для следующего процесса забивки сваи. РСПДУ (30) используют, чтобы следить за подъемом направляющей (11) сваи, и возвращают на установочную станцию для обеспечения возможности повторения этапа (2).
(10) Кран, использовавшийся для подъема и перемещения направляющей (11) сваи, впоследствии используют для извлечения инструмента подъема сваи, временно находящегося в резерве на направляющей (11) сваи, чтобы в направляющий элемент (14) можно было развертывать вторую сваю (50').
(11) Этапы (4)-(9) после этого могут быть повторены.
По завершении забивки последней сваи молот (20) извлекают на поверхность отдельно от направляющей (11) сваи вместе с РСПДУ (30), установленным на установочной станции.
На фиг.5 показано устройство, подобное изображенному на фиг.1-4, за исключением того, что вместо устройства (28) намотки применяется устройство (60) флотации, чтобы держать шланг (24) в безопасности во время забивания свай.
На фиг.6 показано устройство, подобное изображенному на фиг.1-4, за исключением того, что гидравлический молот (20) заменен всасывающим насосом (70), а свая (50) заменена всасывающей сваей или кессонной сваей (80). Всасывающий насос (70) используется для удаления воды, попавшей внутрь всасывающей сваи (80), с образующимся в результате перепадом давления между внешним гидростатическим давлением воды и текучей средой внутри сваи, генерирующим движущую силу для проникновения сваи.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ПОГРУЖНЫХ ОПОРНЫХ КОНСТРУКЦИЙ | 2010 |
|
RU2543835C2 |
| ЯКОРНАЯ СИСТЕМА С ТОЧНЫМ ПОЗИЦИОНИРОВАНИЕМ И СПОСОБ УСТАНОВКИ ЯКОРЕЙ В ЗАДАННЫХ ТОЧКАХ (ВАРИАНТЫ) | 1998 |
|
RU2232228C2 |
| СПОСОБ СБОРКИ И МОРСКОГО МОНТАЖА МОРСКОЙ СТАЦИОНАРНОЙ ПЛАТФОРМЫ | 2004 |
|
RU2273695C1 |
| ВОЛНОВАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 1990 |
|
RU2010995C1 |
| ГЛУБОКОВОДНЫЙ СВАЕБОЙНЫЙ КОПЕР | 2009 |
|
RU2498016C2 |
| КОМПЛЕКС ДЛЯ БУРЕНИЯ СКВАЖИН В СКАЛЬНЫХ ПОРОДАХ | 2023 |
|
RU2819392C1 |
| СПОСОБ СООРУЖЕНИЯ МОРСКОЙ ПЛАТФОРМЫ | 2004 |
|
RU2346110C2 |
| Устройство для отбора проб минеральной взвеси с различных горизонтов в придонном слое моря в зоне интенсивного волнения и обрушения волн | 2017 |
|
RU2657481C1 |
| ОПИРАЮЩАЯСЯ НА ДНО ПЛАТФОРМА И СПОСОБ СОЗДАНИЯ БУРОВОГО ТЕРМИНАЛА ДЛЯ БУРЕНИЯ НА МЕЛКОВОДНОМ ШЕЛЬФЕ | 2017 |
|
RU2719516C1 |
| МОРСКОЙ ЭКОЛОГО-ЭНЕРГЕТИЧЕСКИЙ КОМПЛЕКС | 2011 |
|
RU2466053C1 |
Изобретение относится к способу и установке для забивания сваи в подводную подстилающую породу, такую как морское дно. Предложена установка (10) для забивания сваи в подводную подстилающую породу, содержащая направляющую (11) сваи, имеющую несущую раму (12) с направляющим элементом (14), установленным на ней, причем направляющий элемент выполнен так, чтобы направлять сваю по мере того, как ее забивают в подстилающую породу, когда несущая рама опирается на нее. Несущая рама образует по существу прямоугольную платформу, чтобы нести устройство для забивания сваи в подстилающую породу, и источник энергии для обеспечения энергии и приведения в действие этого устройства во время развертывания. После развертывания сваю (50) располагают в направляющем элементе (14), а устройство (2) поднимают на сваю (50). Источник (30) энергии приводит в действие устройство (2), когда сваю (50) забивают в подстилающую породу. Изобретение обеспечивает возможность забивания свай на любых глубинах, а также делает возможным уменьшение или даже исключение обычного требования извлечения устройства на поверхность между монтажами. 2 н. и 27 з.п. ф-лы, 8 ил.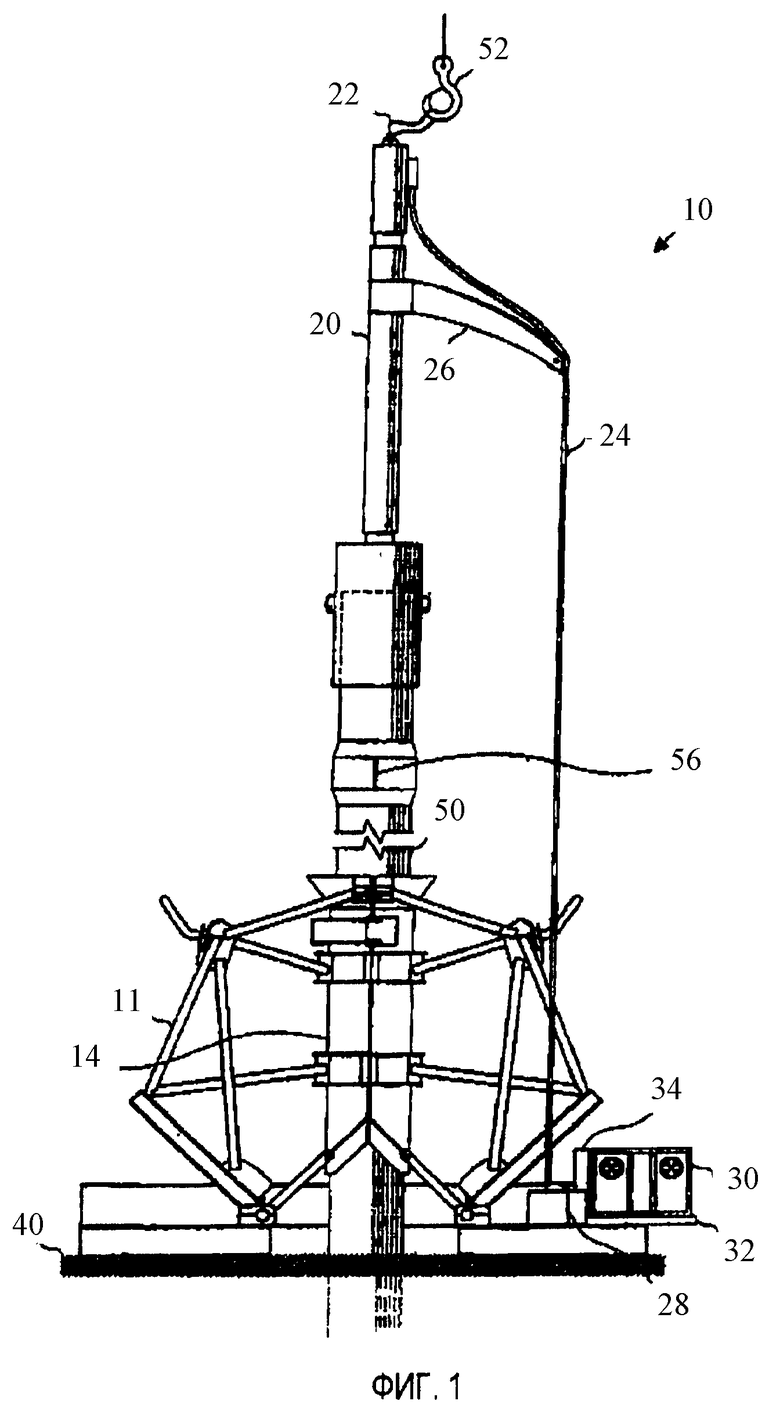
1. Установка для забивания сваи в подводную подстилающую породу, содержащая
направляющую сваи, содержащую несущую раму и направляющий элемент, установленный на несущей раме, причем направляющий элемент выполнен с возможностью направления сваи по мере того, как ее забивают в подстилающую породу, когда несущая рама опирается на нее,
устройство для забивания сваи в подстилающую породу, и
источник энергии для обеспечения энергии и приведения в действие этого устройства,
в которой несущая рама направляющей сваи образует платформу, выполненную так, чтобы нести устройство и источник энергии, когда направляющая сваи перемещается в положение для забивания сваи.
2. Установка по п.1, отличающаяся тем, что устройство является гидравлическим молотом для забивания свай в подстилающую породу через повторяющиеся удары.
3. Установка по п.1, отличающаяся тем, что устройство является всасывающим насосом для забивания всасывающих свай или кессонных свай в подстилающую породу через перепад давления.
4. Установка по п.1, отличающаяся тем, что платформа включает в себя средство для поддерживания устройства, когда оно присоединено к ней.
5. Установка по п.4, отличающаяся тем, что средство выполнено с возможностью поддерживания устройства в предварительно заданной ориентации, когда оно присоединено к ней.
6. Установка по п.1, отличающаяся тем, что источник энергии выполнен с возможностью обеспечения механической или электрической энергией.
7. Установка по п.1, отличающаяся тем, что источник энергии выполнен с возможностью обеспечения гидравлической энергией непосредственно для устройства.
8. Установка по п.7, отличающаяся тем, что дополнительно содержит шланг для обеспечения гидравлической энергии от источника энергии для устройства во время забивания свай.
9. Установка по п.8, отличающаяся тем, что устройство включает в себя выступающий рычаг для направления шланга к одной боковой стороне устройства.
10. Установка по п.1, отличающаяся тем, что источник энергии является частью средства передвижения с дистанционным управлением, или рабочего средства передвижения с дистанционным управлением, съемным образом установленного на платформе направляющей сваи.
11. Установка по п.10, отличающаяся тем, что средство передвижения с дистанционным управлением, когда установлено на платформе, выполнено так, чтобы обеспечивать опору для контроля ориентации направляющей сваи во время развертывания.
12. Установка по п.10, отличающаяся тем, что платформа направляющей сваи включает в себя установочную станцию для повторяемого прикрепления/отделения от нее средства передвижения с дистанционным управлением.
13. Установка по п.12, отличающаяся тем, что установочная станция имеет панель сопряжения, выполненную с возможностью принятия энергии от средства передвижения с дистанционным управлением, когда оно прикреплено к установочной станции.
14. Установка по п.13, отличающаяся тем, что средство передвижения с дистанционным управлением и панель сопряжения включают в себя сопряженные соединители для осуществления связи между источником энергии и панелью сопряжения.
15. Установка по п.14, отличающаяся тем, что соединители автоматически зацеплены сопряженным образом, когда средство передвижения с дистанционным управлением прикреплено к установочной станции.
16. Способ забивания сваи в подводную подстилающую породу, в котором
обеспечивают установку, содержащую: направляющую сваи, содержащую несущую раму и направляющий элемент, установленный на несущей раме, причем направляющий элемент выполнен с возможностью направления сваи по мере того, как ее забивают в подстилающую породу, когда несущая рама опирается на нее, устройство для забивания сваи в подстилающую породу, и источник энергии для обеспечения энергии и приведения в действие этого устройства, причем несущая рама направляющей сваи образует платформу, выполненную так, чтобы нести устройство и источник энергии, когда направляющую сваи передвигают в положение для забивания сваи,
размещают установку на подстилающей породе,
размещают сваю в направляющем элементе сваи,
перемещают устройство от платформы несущей рамы, чтобы зацепить сваю, и
осуществляют забивание сваи в подстилающую породу, используя источник энергии, чтобы приводить в действие устройство.
17. Способ по п.16, в котором дополнительно осуществляют хранение устройства забивания на платформе несущей рамы после того, как свая была забита в подстилающую породу, и до того, как новая свая будет забиваться в подстилающую породу.
18. Способ по п.16, в котором устройство имеет положение покоя на платформе несущей рамы и рабочее положение на свае в направляющем элементе сваи, причем способ дополнительно содержит перемещение устройства между его положением покоя и его рабочим положением с помощью крана над уровнем воды.
19. Способ по п.18, в котором дополнительно используют кран для того, чтобы поднимать и опускать направляющую сваи и размещать сваю в направляющем элементе сваи.
20. Способ по п.16, в котором устройство является одним из гидравлического молота и всасывающего насоса, причем сваи являются соответственно одними из обычных свай и всасывающих свай.
21. Способ по п.16, в котором источник энергии является частью средства передвижения с дистанционным управлением или рабочего средства передвижения с дистанционным управлением, съемным образом установленного на платформе направляющей сваи.
22. Способ по п.21, в котором дополнительно осуществляют отделение средства передвижения с дистанционным управлением от платформы несущей рамы, чтобы выполнять задачу, связанную с забиванием сваи.
23. Способ по п.22, в котором задачу выбирают из группы, состоящей из: проверки сваи в направляющем элементе сваи, разъединения крепежных деталей, прикрепляющих устройство к несущей раме, подсоединения устройства к подъемному средству, проверки зацепления между устройством и сваей, проверки сваи, как только она забита в подстилающую породу, и подсоединения направляющей сваи к подъемному средству.
24. Способ по п.22, в котором платформа несущей рамы включает в себя установочную станцию для повторного прикрепления средства передвижения с дистанционным управлением к платформе, как только одна или когда каждая задача завершена.
25. Способ по п.24, в котором установочная станция имеет панель сопряжения, выполненную с возможностью принятия энергии от средства передвижения с дистанционным управлением, когда оно прикреплено к установочной станции.
26. Способ по п.25, в котором средство передвижения с дистанционным управлением и панель сопряжения включают в себя сопряженные соединители для сообщения энергии от первого к последней.
27. Способ по п.24, в котором дополнительно устанавливают сопряженное зацепление соединителей посредством повторного прикрепления средства передвижения с дистанционным управлением к платформе через установочную станцию.
28. Способ по п.21, в котором дополнительно используют средство передвижения с дистанционным управлением для обеспечения опоры и контроля ориентации направляющей сваи и размещения во время развертывания.
29. Способ по п.16, в котором дополнительно осуществляют контроль ориентации устройства относительно сваи в направляющем элементе сваи при зацеплении сваи.
| US 4817734 А, 04.04.1989 | |||
| Ударное устройство | 1975 |
|
SU542158A1 |
| Установка для забивки свай под водой | 1978 |
|
SU734342A1 |
| Устройство для забивки обсадных труб | 1980 |
|
SU939647A1 |
| Устройство для погружения винтовых свай в грунт | 1981 |
|
SU969826A1 |
| УСТРОЙСТВО ДЛЯ ЗАБИВКИ ОПОР В МОРСКОЕ ДНО | 2002 |
|
RU2233945C2 |
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |

