Изобретение относится к средствам обнаружения параметров скрытых объектов с использованием физических характеристик среды, например электромагнитного поля, создаваемого или изменяемого объектом поиска.
Изобретение может использоваться в металлоискателях для поиска металлических предметов, находящихся под слоем снега, грунта, асфальта; в трассоискателях для определения местоположения и глубины залегания скрытых коммуникаций (кабели, трубопроводы); в течеискателях для обнаружения утечек теплоносителя (воды, пара) в трубопроводах.
Известны механизмы сканирования поисковой головкой металлоискателя, см., например, металлоискатель МДL-001-SA, А.Ю.Саулов, Металлоискатели, изд. Наука и техника, С-Петербург, 2004 г., стр.63.
Известный металлоискатель содержит поисковую головку, закрепленную на конце штанги и подлокотник для опоры руки оператора.
Подлокотник устанавливается на руке оператора, который с помощью штанги сканирует поисковой головкой, удерживая ее на расстоянии 3-4 см над грунтом. Если металлический предмет находится в зоне действия поисковой головки, то в ней возникает электрический сигнал определенной величины. Однако о месте нахождения этого предмета можно судить весьма приближенно.
В современных металлоискателях используется цифровая или звуковая индикация факта обнаружения металлического предмета. При цифровой индикации оператор, считывая показания с монитора прибора, должен эти показания запоминать и судить по ним о размерах и форме предмета. Однако эти показания не позволяют судить о местонахождении предмета относительно оператора в предыдущих измерениях, даже в тех случаях, когда все измерения запоминаются в электронной памяти.
Еще сложнее работать при использовании звуковой индикации. В данном случае сравниваются уровни сигналов в разных точках, поэтому результат сравнения этих сигналов сложно использовать для оценки размеров и формы предмета поиска.
Известные механизмы сканирования поисковой головкой не содержат средств для измерения формы, размеров и координат объектов поиска, позволяющих судить о виде объекта и его точном местонахождении.
Эта задача решается тем, что в механизм сканирования поисковой головкой включен датчик угла сканирования, который встроен в корпус цилиндрической формы, соединенной с одной стороны со штангой, а с другой - с прикладом для опоры на тело оператора. Приклад для опоры на тело оператора посажен на ось подвижной части датчика угла сканирования. Сигналы с датчика угла сканирования используются в счетно-решающем устройстве для определения местоположения поисковой головки в процессе сканирования. Таким образом, на мониторе прибора имеются показания об уровне сигнала в поисковой головке и о ее положении в процессе сканирования относительно оператора.
Приклад для опоры на тело оператора может быть жестко закреплен на корпусе датчика угла сканирования. В этом случае ось подвижной части датчика угла сканирования соединена со штангой. Это не меняет сущность заявленного изобретения.
Приклад может опираться на тело оператора через пояс или бандаж, на котором приклад закрепляется.
Для удобства пользования штанга выполняется раздвижной. На выдвижной части (штоке) установлена поисковая головка. Верхняя часть штанги шарнирно соединена с корпусом датчика угла сканирования.
Обе части штанги скрепляются цанговым зажимом. На корпусе датчика угла сканирования имеется рукоять для управления движением поисковой головки.
На чертеже изображен механизм сканирования поисковой головкой.
Механизм сканирования имеет датчик угла сканирования, который встроен в корпус 1. Датчик угла сканирования содержит подвижною часть с осью 2, на которую посажен приклад 3 для опоры на тело оператора. Приклад может быть выполнен в виде щитка лоткообразной формы и опираться на бедро или корпус оператора. Щиток может быть также закреплен на поясе (бандаже), размещенном на операторе. К боковой поверхности корпуса 1 датчика угла сканирования прикреплена рукоять 4. Для удобства пользования штанга должна иметь возможность поворота относительно корпуса датчика угла сканирования. С этой целью к боковой поверхности корпуса 1 прикреплена стойка 5, шарнирно соединенная со штангой 6. Штанга должна фиксироваться в определенном положении относительно корпуса датчика 1, например, под углом 30-60° к поверхности грунта. Для реализации этой задачи в канал штанги 6 впрессован хвостовик 7, соединенный со стойкой 5 осью 8. Хвостовик 7 имеет резьбовую часть 9, на которую навернута гайка 10. Стойка 7 имеет опорные поверхности 11, к одной из которых прижимается гайка 10, и фиксирует определенный угол наклона относительно корпуса 1 датчика угла сканирования. Он может быть выбран равным 30°, 45°, 60°. Штанга 6 выполнена составной. Нижняя ее часть (шток) 13 вдвигается во внутренний канал верхней части 6 штанги, т.е. она выполнена телескопической. С этой целью наружный диаметр штока делается несколько меньшим внутреннего диаметра верхней части штанги. Для фиксации обеих частей штанги применяются известные средства, например цанговый зажим.
На конце штока 13 закреплена поисковая головка 12. Кабель 14 от поисковой головки 12 к датчику угла сканирования проложен по внутреннему каналу штанги 6. Кабель свернут в спираль (винтообразно), что обеспечивает его работоспособность в сложенном и выдвинутом положениях.
Механизм сканирования поисковой головкой может быть выполнен по другому варианту. В этом варианте ось 2 подвижной части датчика угла сканирования соединена не с прикладом 3, а со штангой 6. С этой целью стойка 5 закреплена на оси 2 подвижной части датчика угла сканирования, а приклад жестко скреплен с корпусом датчика.
Механизм сканирования работает следующим образом. Приклад 3 приставляется к голени или бедру оператора и с помощью рукояти 4 корпус 1 датчика угла вместе со штангой 6 поворачивается на оси 2. В результате оператор сканирует поисковой головкой, удерживая ее на 3-4 см над поверхностью грунта.
Электрический сигнал, возникающий в поисковой головке 12 по кабелю 14, передается на блок обработки прибора. На этот же блок обработки по кабелю 15 передается сигнал с датчика угла сканирования. После обработки указанных сигналов на мониторе прибора воспроизводится изображение, характеризующее уровень сигнала от объекта поиска и его местоположение относительно оператора.
Опытный образец металлоискателя с заявленным механизмом сканирования поисковой головкой изготовлен и проходит стендовые испытания.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ПОИСКОВОЙ ГОЛОВКИ ИСКАТЕЛЯ | 2008 |
|
RU2361243C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ СМОТРОВЫХ КОЛОДЦЕВ ТРУБОПРОВОДОВ | 2013 |
|
RU2559864C2 |
| СПОСОБ ПОИСКА ДЕФЕКТА И МЕСТА ПРОХОЖДЕНИЯ КОММУНИКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2327964C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАССЫ ПОДЗЕМНОЙ МЕТАЛЛИЧЕСКОЙ ЛИНИИ | 2005 |
|
RU2302649C2 |
| Комбинированный металло-газоиндикатор | 2023 |
|
RU2815363C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ПОВРЕЖДЕНИЯ НА ТРАССЕ ПОДЗЕМНОЙ ЭЛЕКТРОПРОВОДЯЩЕЙ ЛИНИИ | 2005 |
|
RU2285269C1 |
| Металлоискатель с бесконтактной связью с измерительным датчиком | 2023 |
|
RU2805004C1 |
| Двухканальный индукционно-радиоволновый металлоискатель с двухуровневым поисковым элементом | 2024 |
|
RU2835380C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ЗОНДИРОВАНИЯ ПОВЕРХНОСТИ ЗЕМЛИ ДЛЯ ПОИСКА И МАРКИРОВКИ ВЗРЫВООПАСНЫХ ПРЕДМЕТОВ | 2024 |
|
RU2822025C1 |
| РУЧНОЙ МЕТАЛЛОДЕТЕКТОР, АКТИВИЗИРУЕМЫЙ ЧЕХЛОМ | 2020 |
|
RU2756834C1 |
Изобретение относится к средствам обнаружения скрытых объектов с использованием электромагнитного поля и может использоваться в металлоискателях, в трассоискателях, работающих по принципу сканирования поисковой головкой. Сущность: механизм сканирования поисковой головкой содержит приклад для опоры на тело оператора, штангу, на конце которой закреплена поисковая головка. Механизм снабжен датчиком угла сканирования, который встроен в корпус цилиндрической формы, соединенный с одной стороны со штангой, а с другой - с прикладом для опоры на тело оператора. Приклад закреплен на подвижной части датчика угла сканирования. Штанга шарнирно соединена с корпусом датчика угла сканирования. Технический результат: возможность определения местоположения поисковой головки в процессе сканирования относительно оператора. 7 з.п. ф-лы, 1 ил.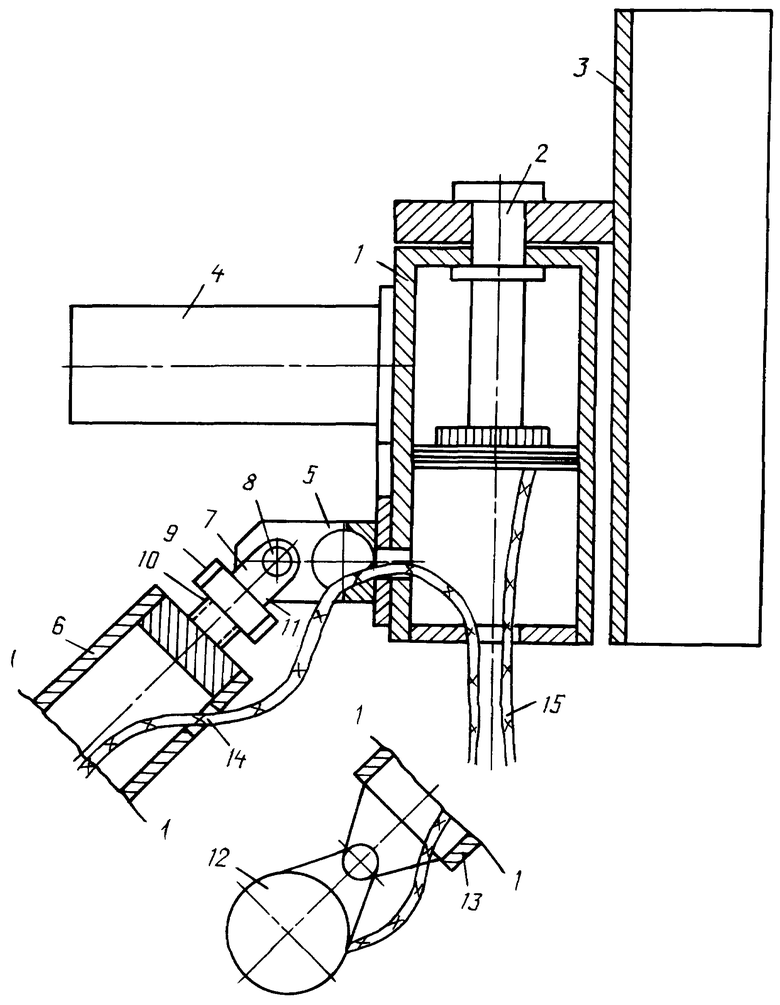
1. Механизм сканирования поисковой головкой, содержащий штангу, на конце которой закреплена поисковая головка, приклад для опоры на тело оператора, отличающийся тем, что он снабжен датчиком угла сканирования, встроенным в корпус, например цилиндрической формы, соединенным с одной стороны со штангой, а с другой - с прикладом для опоры на тело оператора.
2. Механизм сканирования поисковой головкой по п.1, отличающийся тем, что приклад для опоры на тело оператора закреплен на подвижной части датчика угла сканирования.
3. Механизм сканирования поисковой головкой по п.1, отличающийся тем, что штанга шарнирно соединена с корпусом датчика угла сканирования.
4. Механизм сканирования поисковой головкой по п.1, отличающийся тем, что приклад для опоры на тело оператора закреплен на поясе (бандаже) оператора.
5. Механизм сканирования поисковой головкой по п.1, отличающийся тем, что штанга выполнена раздвижной, состоящей из двух частей, и снабжена цанговым зажимом.
6. Механизм сканирования поисковой головкой по п.1, отличающийся тем, что кабель от поисковой головки к датчику угла сканирования проложен по внутреннему каналу штанги и свернут в виде спирали (винтообразно).
7. Механизм сканирования поисковой головкой по п.1, отличающийся тем, что на корпусе датчика угла сканирования закреплен держатель.
8. Механизм сканирования поисковой головкой по п.1, отличающийся тем, что штанга закреплена на подвижной части датчика угла сканирования.
| Следящий датчик магнитного поля наОСНОВЕ ядЕРНОгО МАгНиТНОгО РЕзОНАНСА | 1979 |
|
SU798570A1 |
| US 5138262 А, 11.08.1992 | |||
| 0 |
|
SU161089A1 | |
| СПОСОБ ПОИСКА МИН СВЕРХШИРОКОПОЛОСНЫМ ГЕОРАДАРОМ | 2004 |
|
RU2248018C1 |

