Область техники
Изобретение относится к области робототехники и предназначено для обнаружения взрывоопасных предметов, в частности для разминирования минных полей.
Уровень техники
Известен робот-сапер (см. патент RU 2405122, МПК F41H11/16, B25J5/00, опубл. 27.11.2010 г.), состоящий из множества одноосных самоходных модулей, доставляемых на место разминирования посредством отдельного транспортного средства и осуществляющих коллективными действиями разминирование отдельных боеприпасов или минных полей. Одноосные самоходные модули выполнены автономными с возможностью обмена информацией между ними и составляющими мультиагентную систему. При этом они снабжены навигационными системами с устройствами ориентации относительно реперов и/или спутниковой навигационной системой, оборудованием для дистанционного обнаружения и идентификации боеприпасов, исполнительными механизмами для их маркирования и уничтожения и нейросетевыми устройствами обработки информации и выработки команд для исполнительных механизмов в режиме коллективного управления. Изобретение направлено на повышение эффективности разминирования минных полей и эффективности использования навигационных систем автономных модулей.
Недостатком данной конструкции является одноосная схема построения шасси установки, что может привести к неконтролируемому опрокидыванию установки и резко снизит ее использование в полевых условиях.
Также известен робототехнический комплекс разминирования (см. патент RU 2595097, МПК F41H11/16, опубл. 20.08.2016), содержащий самодвижущееся в безэкипажном режиме наземное транспортное средство, опорный элемент для подрыва мин, беспилотный летательный аппарат, выносной пульт управления, модуль расчетного резервного времени сохранения работоспособности, модуль автоматического поддержания величины требуемых зазоров между поисковым оборудованием и грунтом, радиоканал связи в защищенном исполнении, устройство записи информации в энергонезависимый накопитель и передачи ее по радиоканалу. Наземное транспортное средство оборудовано бронированными листами, видеокамерой, модулем распознавания препятствий движению, приспособлением для беспилотного летательного аппарата. Беспилотный летательный аппарат содержит защиту от поражающего действия мин, навигационную систему, поисковое оборудование, видеокамеру, модуль автоматического распознавания препятствий движению наземного транспортного средства, модуль интеллектуальной обработки информации.
Однако данное устройство не предназначено для физической маркировки взрывоопасного предмета, является сложным и дорогостоящим.
Известно устройство для обнаружения скрытых взрывчатых веществ (см. патент RU 2185614, МПК G01N23/22, G21H 5/00, опубл. 20.07.2002 г.), которое содержит источник импульсного ионизирующего излучения, генерирующий пучок гамма-квантов с максимальной энергией гамма-квантов больше 31 МэВ, детектор вторичного излучения и анализатор сигналов детектора. Данные устройства размещены на подвижной платформе. Наличие в составе устройства источника гамма-квантов с энергией более 31 МэВ позволяет применить для идентификации скрытых взрывчатых веществ метод гамма-активационного анализа.
Однако данное устройство также не предназначено для физической маркировки взрывоопасного предмета, является сложным и дорогостоящим. Кроме того, для идентификации скрытых взрывоопасных предметов необходим источник гамма-квантов с энергией более 31 МэВ, что осложняет обеспечение работы установки в целом с точки зрения энергоэффективности.
Наиболее близким к предлагаемому решению является мобильный шестиколесный робот, содержащий модуль системы геопозиционирования, содержащий электронный компас, трехосный акселерометр и приемник сигналов ГЛОНАСС/GPS, прямоугольную раму, шесть мотор-колес, корпус, два одинаковых независимых манипулятора, моторизированную раздвижную телескопическую штангу, обзорную видеокамеру с инфракрасной подсветкой, две фронтальные видеокамеры с инфракрасной подсветкой, две задние видеокамеры с инфракрасной подсветкой и модуль бортовой информационно-управляющей системы. Модуль системы геопозиционирования снабжен лазерным радаром и установлен на конце моторизованной раздвижной телескопической штанги, закрепленной сзади корпуса робота (см. патент RU 169071, МПК B25J5/00, B25J13/08, опубл. 02.03.2017).
Однако данное устройство также не предназначено для физической маркировки взрывоопасного предмета, а использование комбинированного метода установки мин, в том числе противоборствующими сторонами, может привести к потери актуальности карты минного поля.
Раскрытие сущности.
Техническая проблема заключается в разработке маневренного ремонтопригодного роботизированного комплекса зондирования и маркировки взрывоопасных предметов.
Технический результат заключается в повышении маневренных качеств комплекса и чувствительности.
Заявленный результат достигается тем, что робототехнический комплекс зондирования поверхности земли для поиска и маркировки взрывоопасных предметов, содержащий прямоугольную раму на мотор-колесах, на которой установлены модуль системы геопозиционирования, манипулятор, и модуль бортовой информационно-управляющей системы, согласно решению, манипулятор снабжен кареткой, на которой расположен картридж с маркерами, каретка манипулятора выполнена с возможностью перемещения головки в горизонтальной плоскости, на каждой из сторон рамы находится рейка индукционного металлоискателя, на рулевых колонках мотор-колес установлены дистанционные индукционные датчики.
Мотор-колесо может представлять собой бесщеточный синхронный электромотор постоянного тока, интегрированный в ступицу колеса, при этом электромотор, передаточный механизм и колесо объединены в общий узел.
В общий узел каждого мотор-колеса может быть вмонтирован датчик Холла.
Картридж может быть выполнен в виде быстро съемной кассеты с вложенными флажками-маркерами. Для установки флажка-маркера может быть использован сжатый воздух или маломощный пиропатрон или вращение шпинделя с закрепленным в него флажком-маркером, на конце которого находится стилизованный винт Архимеда.
Также возможно использование форсунки для нанесения отметок красящими порошками, в том числе светоотражающими или люминофорными.
Модуль бортовой информационно-управляющей системы имеет возможность дистанционного вмешательства в случае возникновения нештатной ситуации.
В качестве материала рамы выбраны, например, кевларовые трубы, а комплекс дополнительно содержит магнитометр.
Краткое описание чертежей
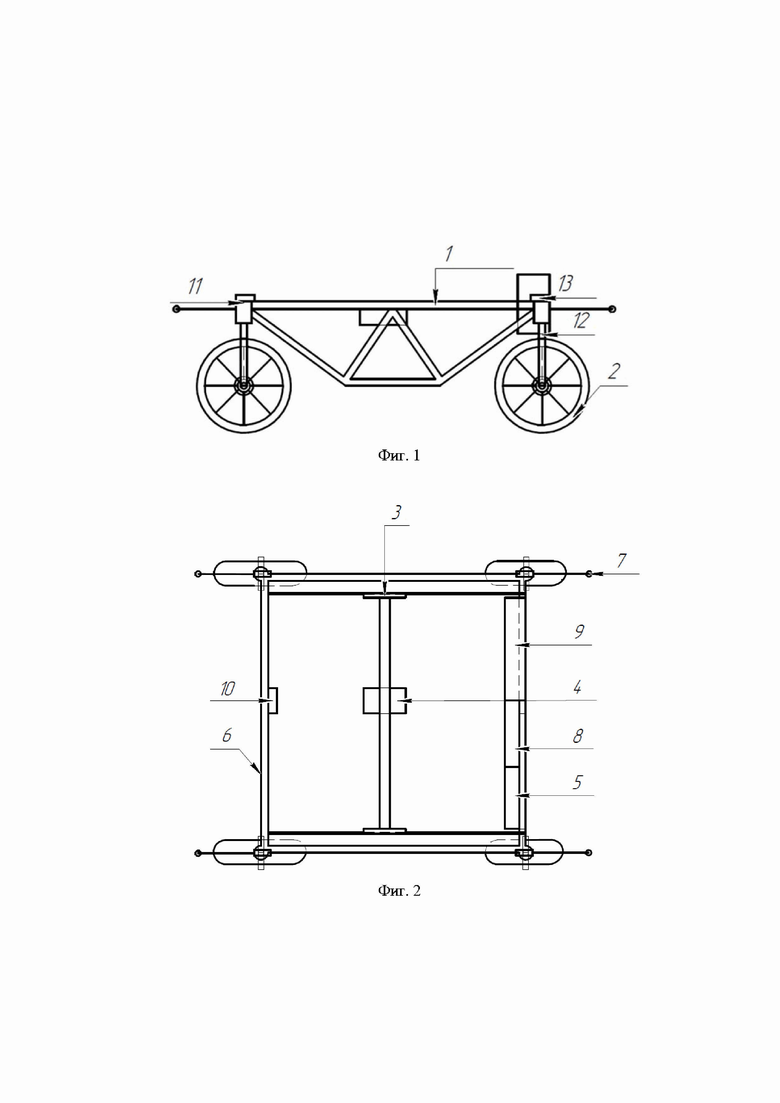
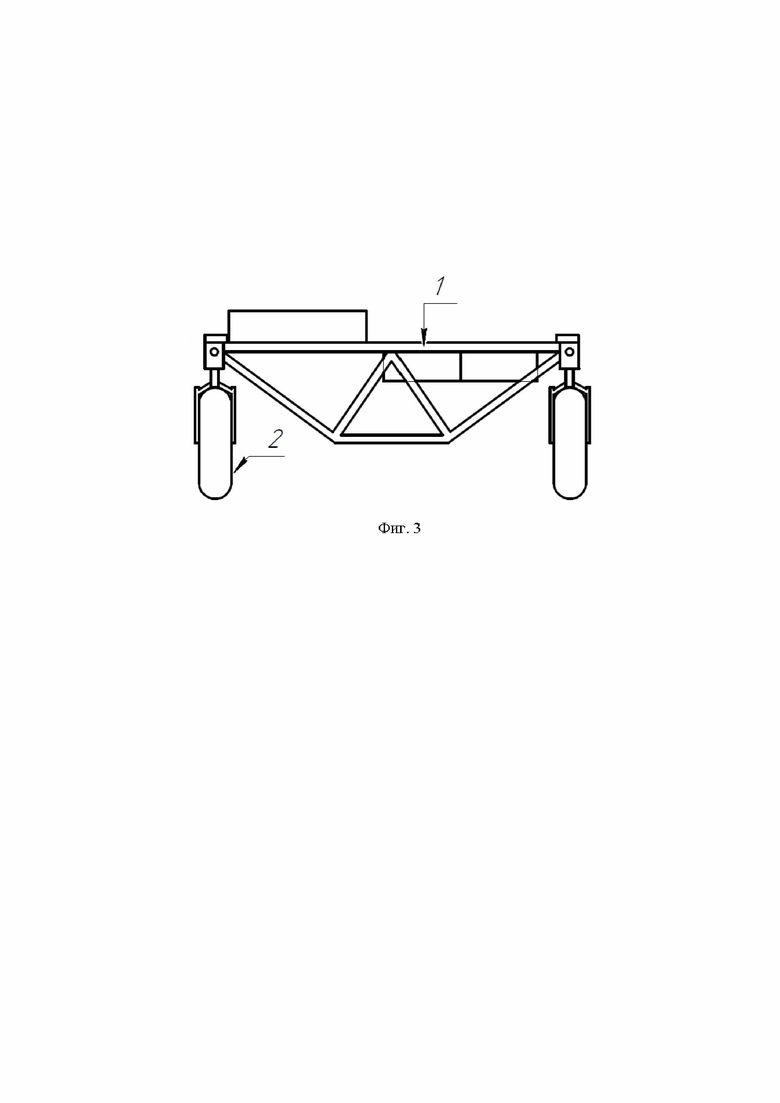
Изобретение поясняется чертежами, на фиг. 1 – представлен вид сбоку заявляемого устройства, на фиг. 2 – вид сверху, на фиг. 3 – вид сзади.
Позициями на чертеже обозначено:
1. рама;
2. мотор-колесо;
3. манипулятор;
4. каретка манипулятора;
5. картридж с флажками-маркерами;
6. рейка индукционного миноискателя (индукционная рейка);
7. выносные индукционные датчики;
8. блок вычислителя (БВ);
9. независимая энергетическая установка;
10. тепловизор;
11. рулевые стаканы;
12. рулевые колонки;
13. поворотный сервопривод.
Осуществление изобретения
Робототехнический комплекс (РКЗ), содержит раму 1, которая изготавливается из алюминиевого сплава (фиг. 1, 3). Выбор алюминия обусловлен, прежде всего, отсутствием электромагнитной индукции и возможностью проведения оперативных сварочных работ в случае повреждения конструкции рамы. С целью обеспечения ремонтопригодности предусмотрена возможность разъемной конструкции рамы на отдельные элементы.
Рама 1 устройства в частном случае выполнения представляет собой равносторонний квадрат при виде сверху, в углах конструкции находятся рулевые стаканы 11, в которые вставлены рулевые колонки 12 мотор-колес 2 с поворотным сервоприводом 13. Данная кинематическая схема позволяет при синхронизированном повороте каждого колеса обеспечить максимальные маневренные качества установки.
На раму 1 (фиг. 2) монтируют все основные компоненты робототехнического комплекса. В задней части квадрата рамы 1, границы которого определены рамой, располагается блок вычислителя 8 (модуль бортовой информационно-управляющей системы). Также расположен картридж 5 с флажками-маркерами. На раме закреплена головка манипулятора 3 с кареткой 4. Система координат каретки 4 РКЗ, в которой определяется положение манипулятора головки, является главной расчетной системой определяющей перемещение исполнительного органа, манипулятора. Оси координат располагают параллельно направляющим каретки, что позволяет при создании управляющей программы задавать направления и расстояния перемещений. Система координат включает в себя все физические оси манипулятора. По стандартам все прямолинейные перемещения рассматривают в правосторонней прямоугольной системе координат оси абсцисс X, оси ординат Y, оси аппликат Z, где ось Z совпадает с осью манипулятора исполнительной головки в функцию которой входит извлечения из картриджа сигнального флажка сапера указывающего при установки его визуально на поверхность земли на взрывоопасный предмет, с одновременной маркировкой флуоресцентной краской. В качестве манипулятора головки для захвата флажка сапера возможно использование электромагнита, удерживающего флажок сапера, а также механизма придающего вращательное движение флажку, с целью обеспечения уменьшения усилия для установки флажка сапера в землю. На каждой из четырех сторон квадрата рамы находится рейка индукционного металлоискателя 6. На рулевых колонках 12 колес вынесены дистанционные индукционные датчики 7.
Мотор-колесо 2 – бесщеточный синхронный электромотор постоянного тока, интегрированный в ступицу колеса. Электромотор, передаточный механизм (планетарная передача вращательного движения, которая за счет своей конструкции способна изменять подводимые угловые скорости и крутящий момент в пределах одной геометрической оси вращения) и колесо объединены в общий узел, что придает ему высокую эксплуатационную надежность. В узел мотор-колеса вмонтирован датчик Холла (на фиг. не показан) для бесконтактного определения позиционирования колеса, выявления скорости и определения тока. Полученные данные необходимы для синхронизации скорости вращения четырех колес. Размер мотор-колеса определяется необходимостью работы в высокой траве, диаметром 30 дюймов. Торможение колес осуществляется за счет динамического торможения синхронного двигателя.
Мотор-колесо содержит колесо, например, велосипедное, с рулевой колонкой 12 и рулевым стаканом 11, и поворотным сервоприводом 13. Мотор-колесо закреплено в усиленной велосипедной вилке, снабженной газовыми амортизаторами с увеличенным движениям штока амортизатора. Рулевая колонка 12 вставлена в рулевой стакан 11, который прикреплен при помощи сварки к углам рамы РКЗ. Верхняя часть рулевой колонка 12 жестко соединена через рычаг с сервоприводом, (в качестве сервопривода возможно использование шагового электродвигателя) синхронизация поворота всех колес, кроме электронного управления, а также контроля угла поворота колес необходимо использовать механические тяги которые будут жестко осуществлять синхронный поворот всех четырех колес, тем самым будет обеспечиваться максимальная координация и управление РКЗ.
Сервопривод колеса 13 осуществляет управление и контроль угла поворота колеса за счет вмонтированного в рулевой стакан 11 датчика Холла, смонтированного на амортизационной вилке велосипедного колеса. Сервоприводы обеспечивают одновременный поворот всех четырех колес. Одновременно осуществляется синхронизация поворота всех колес устройства.
Картридж 5 это быстросъемная кассета, куда вкладываются флажки-маркеры с возможностью дозарядки указанной кассеты с последующей установкой в посадочное гнездо робототехнического комплекса. В качестве придания кинетического импульса флажку-маркеру возможно использовать сжатый воздух, маломощный пиропатрон или использовать вращение патрона с закрепленным в него флажком-маркером на конце которого находится стилизованный винт Архимеда.
Каретка манипулятора 4 имеет возможность перемещения в горизонтальной плоскости, в двух плоскостях Х,Y, с функцией захвата флажка-маркера и установки его в 10 см от найденного предмета. Расстояние до предмета определяется программно.
Рейка индукционного миноискателя закреплена по периметру рамы устройства, индукционные датчики вынесены на определенное расстояния впереди колеса установки, указанная функция необходима для экстренной остановки устройства в случае обнаружения взрывоопасного предмета. В случае использования в качестве материала рамы кевларовых труб, а также головки манипулятора возможно использование магнитометра, как дополнение к индукционным датчикам. С этой целью предусмотреть возможность изготовления головки манипулятора из не магнитных материалов на которую будет смонтирован магнитометр. Разрешающая возможность магнитометра существенно повысит качество диагностики взрывоопасного предмета (вес, тип, расположение в земле и пр.).
Устройство работает следующим образом.
Блок вычислителя 8 осуществляет общее управление, контроль и связь с оператором, осуществляющим контроль работы комплекса с возможностью дистанционного вмешательства в случае возникновения нештатной ситуации. БВ имеет максимальную степень защиты (по аналогии с черным ящиком самолета), с возможностью в случае сохранения работоспособного состояния (предусмотреть оперативную диагностику БВ в полевых условиях), установкой его на другой робототехнический комплекс. Решение данного вопроса определяется стоимостью указанного БВ и его максимального сохранения.
Первоначально при выходе на площадку разминирования, проводятся инженерные работы, связанные с разметкой участка и установкой на углах реперных точек. Указанная точка необходима для привязки измерения границ исследуемой зоны.
Далее устанавливается робототехнический комплекс, который в рамках системы позиционирования ГЛОНАСС с максимальной точностью «привязывается» к исследуемой площадке. Когда в электроном образе БВ сформирована общая карта минного поля и определена исходная точка, где находится РБЗ, БВ используя оптимальный маршрут разработанный на основе исходных данных, а именно: (размер участка, наклон, растительность, время года и другие параметры) производит расчет траектории движения. После формирования общей машинной карты, указанный алгоритм передается на согласование оператору, где человек принимает окончательное решение о запуске установки.
РКЗ начинает плавное движение без участия оператора, в связи с тем, что индукционные рейки вынесены за габариты установки, происходит круговое (по периметру) РКЗ сканирование, в случае обнаружения боеприпаса внутри периметра РКЗ, происходит остановка и каретка манипулятора, захватив флажок-маркер из кассеты, устанавливает его на расстоянии 10-15 см, одновременно маркируя краской указанное место. На каретке манипулятора находится дополнительный индукционный датчик, основная задача которого сканирование и определение взрывоопасных предметов внутри периметра рамки, если их количество больше одного.
После маркировки, процесс движения запускается дальше, цикл повторяется. В связи с небольшим весом и шириной использования колес РКЗ (велосипедные ширина протектора покрышки до 8 см), вероятность подрыва резко уменьшается, но не исключается полностью. Для этого перед каждым из четырех колес, вынесен на штанге индукционный датчик, в функции которого входит остановка и изменение траектории движения РКЗ. Для этого используется не традиционная схема изменения траектории движения устройства, а именно все четыре колеса могут поворачиваться с помощью сервопривода на 190 градусов, в двух направлениях для изменения траектории движения. Одновременно на предварительно сформированной электронной карте, возникает метка, информация и координаты которой транслируются на электронное устройство сапера, например планшет.
РКЗ работает в автономном режиме, при возникновении нештатной ситуации, происходит вызов оператора и включаются видеокамера и тепловизор с высоким разрешением, для принятия оператором оперативного решения.
Функции РКЗ:
• Точное определение координат устройства и взрывоопасного предмета методом электромагнитной индукции с использованием системы позиционирования ГЛОНАС, в основу которой положен принцип трилатерации или метод наименьших квадратов.
• Составление общей электронной карты с границами исследуемого участка и нанесенного на него координатами найденных взрывоопасных предметов.
• Осуществление первичного анализа и типа взрывоопасного предмета с помощью БВ, определяя степень опасности для сапера на основе заложенных в память устройства визуальных и технических параметров мин и неразорвавшихся боеприпасов.
• Управление работой каретки манипулятора и маркера краски (если провести машинный анализ на основе заложенных в память БВ образов и технических характеристик взрывоопасных предметов, возможна установка маркеров разной цветовой окраски, определяемой по степени опасности).
• БВ на основе алгоритма заложенного в память устройства определяет оптимальную траекторию движения в рамках границ исследуемого участка.
• Осуществляется управление и синхронизация работы мотор-колес и сервоприводов колес.
• Формирует видео и аудио сигнал для оператора робототехнического комплекса.
• Проводит функциональную проверку состояния всех узлов и механизмов устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Роботизированный комплекс на железнодорожном ходу по обнаружению взрывоопасных предметов на верхнем строении пути | 2019 |
|
RU2731340C1 |
| Инженерная машина разведки и разминирования | 2022 |
|
RU2794394C1 |
| Мультиагентный робототехнический поисково-спасательный комплекс | 2021 |
|
RU2773987C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС РАЗМИНИРОВАНИЯ | 2015 |
|
RU2595097C1 |
| РОБОТОТЕХНИЧЕСКИЙ РАЗВЕДЫВАТЕЛЬНЫЙ КОМПЛЕКС АМФИБИЙНЫЙ | 2017 |
|
RU2654898C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОВОРОТОМ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА И САМОХОДНЫЙ МИННЫЙ РАЗГРАДИТЕЛЬ | 2012 |
|
RU2511269C1 |
| Самоходное бронированное транспортное средство обеспечения разминирования и подготовки объектов к разрушению и крепление для установки навесного оборудования | 2017 |
|
RU2648659C1 |
| КОМПЛЕКС ОБЕСПЕЧЕНИЯ РАЗМИНИРОВАНИЯ И ВЗРЫВОЗАЩИЩЕННЫЙ КОНТЕЙНЕР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2462376C2 |
| Многофункциональный робототехнический комплекс для мониторинга технического состояния, окружающего пространства и проведения технического обслуживания крупногабаритного объекта в сооружении | 2021 |
|
RU2776474C1 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2014 |
|
RU2563074C1 |
Изобретение относится к области робототехники и предназначено для обнаружения взрывоопасных предметов, в частности для разминирования минных полей. Робототехнический комплекс зондирования поверхности земли для поиска и маркировки взрывоопасных предметов содержит раму на мотор-колесах, на которой установлены модуль системы геопозиционирования, манипулятор и модуль бортовой информационно-управляющей системы. Манипулятор снабжен кареткой, на которой расположен картридж с флажками-маркерами. Каретка манипулятора выполнена с возможностью перемещения головки в горизонтальной плоскости. На каждой из четырех сторон рамы находится рейка индукционного металлоискателя. На рулевых колонках мотор-колес установлены дистанционные индукционные датчики. Достигается повышение маневренных качеств комплекса и чувствительности. 6 з.п. ф-лы, 3 ил.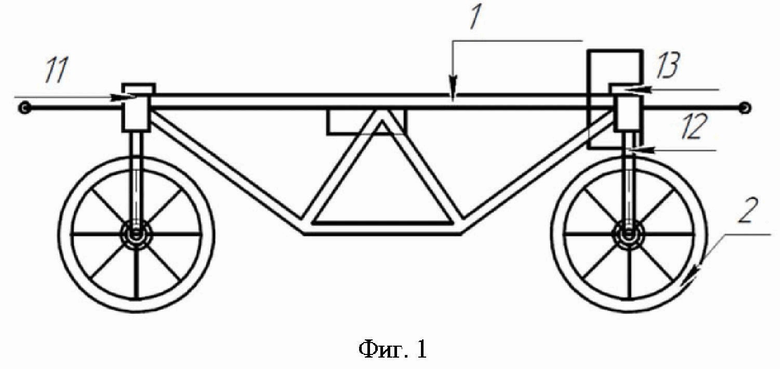
1. Робототехнический комплекс зондирования поверхности земли для поиска и маркировки взрывоопасных предметов, содержащий раму на мотор-колесах, на которой установлены модуль системы геопозиционирования, манипулятор и модуль бортовой информационно-управляющей системы, отличающийся тем, что манипулятор снабжен кареткой, на которой расположен картридж с флажками-маркерами, каретка манипулятора выполнена с возможностью перемещения головки в горизонтальной плоскости, на каждой из сторон рамы находится рейка индукционного металлоискателя, на рулевых колонках мотор-колес установлены дистанционные индукционные датчики.
2. Комплекс по п. 1, отличающийся тем, что мотор-колесо представляет собой бесщеточный синхронный электромотор постоянного тока, интегрированный в ступицу колеса, при этом электромотор, передаточный механизм и колесо объединены в общий узел.
3. Комплекс по п. 2, отличающийся тем, что в общий узел каждого мотор-колеса вмонтирован датчик Холла.
4. Комплекс по п. 1, отличающийся тем, что картридж выполнен в виде быстросъемной кассеты с вложенными флажками-маркерами.
5. Комплекс по п. 4, отличающийся тем, что для установки флажка-маркера использован сжатый воздух или маломощный пиропатрон или вращение шпинделя с закрепленным в него флажком-маркером, на конце которого находится стилизованный винт Архимеда.
6. Комплекс по п. 4, отличающийся тем, что модуль бортовой информационно-управляющей системы выполнен с возможностью дистанционного вмешательства в случае возникновения нештатной ситуации.
7. Комплекс по п. 4, отличающийся тем, что в качестве материала рамы выбраны кевларовые трубы, а комплекс дополнительно содержит магнитометр.
| МОДУЛЬНЫЙ ШИРОКОЗАХВАТНЫЙ КОМПЛЕКС МИНОИСКАТЕЛЕЙ | 2022 |
|
RU2794242C1 |
| Способ траления мин и устройство для его осуществления | 2015 |
|
RU2639837C2 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ СКРЫТЫХ ВЗРЫВЧАТЫХ ВЕЩЕСТВ | 2000 |
|
RU2185614C1 |
| CN 207600307 U, 10.07.2018 | |||
| KR 20190076465 A, 02.07.2019 | |||
| US 2014007756 A1, 09.01.2014. | |||

