Изобретение относится к разведке или обнаружению подповерхностных объектов с использованием электромагнитных волн, в частности сверхширокополосных (СШП) зондирующих сигналов. Изобретение может быть использовано для обнаружения и идентификации мин и других объектов, расположенных как на поверхности, так и в глубине грунта.
В целом на сегодняшний день ситуация с поиском мин выглядит следующим образом.
- Поиск мин связан с затратами, на порядки превосходящими затраты на их установку.
- Поиск мин опасен, и низкая вероятность обнаружения мины приводит к людским потерям.
- Высокая вероятность “ложной тревоги” приводит к снижению скорости разминирования, что неприемлемо в боевых условиях.
- Отсутствуют универсальные способы поиска мин, применимые во всех условиях.
- Каждый технический способ обнаружения мин требует соответствующей поддержки в виде методик действия оператора (сапера), способов подготовки миноискателя, проведения поиска, взаимодействия с сапером и т.п. В действительности эти стороны тесно взаимосвязаны: технические возможности аппаратуры непосредственно влияют на специфику их использования.
Физические основы построения миноискателей можно разделить (Дикарев В.И. и др. Взрывоопасные объекты. - С.Пб, “Лексикон”, Агентство “Вит-принт”, 2002. - 320 с. Иллюстр.) на следующие.
- Способы поиска вторичных факторов, сопровождающих наличие мины на поверхности или в подповерхностном слое грунта. К таким факторам относятся, например, изменения температуры поверхностного слоя грунта. Задача поиска мин в этом случае решается измерителями инфракрасного излучения, как правило, воздушного базирования и решают только задачу общего обзора территории. Такие методы имеют существенные ограничения и мало пригодны для поиска обнаружения конкретной мины в любое время суток, а также при наличии помех в виде снежного, травяного или лиственного покрова.
- Способы поиска веществ, входящих в состав мин, которые подразделяются на методы поиска металла, содержащегося в корпусе или взрывателе мины, и на методы обнаружения взрывчатки (по химическому составу веществ, входящих в мины). Способы поиска металла не позволяют обнаруживать пластиковые мины. Способы обнаружения взрывчатого вещества основаны, например, на использовании радиоактивных излучений, например, ядерного магнитного резонанса, однако габариты таких устройств малопригодны для применения в реальных (боевых) условиях.
- Способы построения изображения подповерхностных объектов. К этой группе способов относятся способы исследования грунта с использованием проникающей радиации, например рентгеновские и нейтронные, и радиолокационные способы подповерхностного зондирования. Первые малопригодны для практического применения из-за габаритов технических средств. Эти способы в меньшей степени подвержены влиянию возмущающих факторов. При успешной реализации они позволяют не только обнаруживать, но и идентифицировать объекты в автоматическом или интерактивном режимах. Перспективность радиолокационных способов подтверждает то, что принимаемый на вооружение армии США миноискатель HSTAMIDS сочетает традиционный металлоискатель и георадар.
Основной проблемой радиолокационных способов является извлечение максимальной информации из отраженных сигналов, причем, чем шире спектр зондирующего сигнала, тем больше информации несет отраженный сигнал. С этой точки зрения наиболее интересно зондирование сверхширополосными сигналами, при котором отраженный сигнал содержит огромное количество информации о подповерхностном слое грунта, а проблема поиска мин состоит в возможности обработки этой информации современными техническими средствами в реальном масштабе времени.
Известны способы поиска мин с использованием инфракрасного излучения (Дикарев В.И. и др. Взрывоопасные объекты. - С.Пб, “Лексикон”, Агентство “Вит-принт”, 2002. - 320 с. Иллюстр.) стр.170, при которых исследуемую область сканируют в инфракрасном диапазоне, принимают сигналы, сравнивают их с пороговым значением, при превышении амплитуды сигнала указанного порога вырабатывается сигнал, по которому судят о наличии аномального объекта. Принцип инфракрасного обнаружения основывается на возникновении температурных аномалий при наличии инородных подповерхностных включений, особенно в местах недавней установки мин. В частности, известен способ обнаружения мин в почве [патент РФ 2122224)], при котором облучают поверхность почвы энергией СВЧ и контролируют прирост температуры, получающийся в результате нагрева почвы, разный на участках, где имеется мина в почве и где ее нет. Сопоставляя контуры прироста температуры с характерными размерами мины, судят о ее наличии в почве.
Недостатком этого способа является низкое качество обнаружения. Инфракрасные обнаружители имеют сильную погодную зависимость, плохо обнаруживают заглубленные объекты, на качество их работы сильно влияет состав грунта, травяной и лиственный покров, идентификация подповерхностного объекта таким способом практически невозможна.
Известен способ поиска мин, реализованный в устройстве для поиска и идентификации пластиковых мин [Патент РФ 2206907], заключающийся в перемещении антенны, приеме пассивного излучения от поверхностных и подповерхностных объектов, частотном анализе полученных излучений, сравнении специфических частотных составляющих с заданными пороговыми уровнями и выделении сигналов, спектр которых характерен для материала корпусов и взрывчатых веществ мин.
Недостатком такого способа является низкое качество обнаружения, связанное с проблемами выделения собственных излучений материалов корпуса и взрывчатых веществ мин из шумовых составляющих.
Известны способы поиска мин индукционным миноискателем (Дикарев В.И. и др. Взрывоопасные объекты. - С.Пб, “Лексикон”, Агентство “Вит-принт”, 2002. - 320 с. Иллюстр.) стр.151-165, при которых зондируют грунт электромагнитными колебаниями, создаваемыми в катушке индуктивности, перемещая миноискатель, принимают отраженные сигналы и сравнивают с установленным порогом, при превышении амплитуды отраженного сигнала указанного порога вырабатывается сигнал, пропорциональный амплитуде отраженного сигнала, по которому судят о характере обнаруженного объекта. Простота применения этого способа и реализующих его технических средств приводит к тому, что на вооружении всех армий мира стоят именно такие миноискатели.
Недостатком этого способа является низкое качество обнаружения. Индукционные миноискатели являются по своей сути металлоискателями. Однако многие из современных мин (пластиковые) не содержат металлических деталей или количество металла в них снижено до долей грамма. Пластиковые мины индукционный металлоискатель не обнаруживает совсем. Повышение чувствительности прибора для обнаружения мало металлических мин приводит к резкому возрастанию “ложных тревог”, и снижению скорости разминирования, так как грунт в местах боевых действий, как правило, содержит много металлических деталей. Кроме того, даже при наличии металлических деталей в мине, сигнал металлоискателя мало информативен. Во-первых, в общем случае маленькая металлическая деталь на небольшой глубине даст такой же отклик, как и большая деталь на большей глубине. Во-вторых, огромное количество разнообразных мин, выпускаемых в мире, не позволяет идентифицировать тип мины по содержанию металла.
Наиболее близким к заявляемому является способ поиска мин СШП георадаром, изложенный в патенте РФ № 2105330 “Геофизический радиолокатор”, заключающийся в том, что перед началом поиска мин оценивают и вводят в память георадара предполагаемые характеристики грунта в области поиска и радиолокационные образы типовых мин, зондируют с выбранным по времени разрешением грунт, для чего антенной георадара излучают сверширокополосный сигнал, принимают отраженный сигнал, нормируют с учетом затухания в грунте, сравнивают амплитуду отклика с установленным порогом обнаружения, при превышении установленного порога вырабатывают сигнал обнаружения аномалии и оценивают глубину ее залегания, перемещают антенну георадара, повторяя зондирование, до точки пропадания сигнала обнаружения аномалии, сканируют аномалию, для чего перемешают антенну георадара над аномалией, многократно повторяя зондирование, запоминают отклики, по которым оценивают характеристики аномалии, формируют ее радиолокационное изображение, автоматически сравнивают его с радиолокационными образами типовых мин и идентифицируют мину, сообщают оператору результаты идентификации, по запросу оператора отображают радиолокационное изображение аномалии, глубину залегания и некоторые характеристики.
Недостатками этого способа является низкое качество обнаружения. Рассмотрим их более подробно.
Поиск мин СШП георадарами принципиально отличается от поиска других подповерхностных объектов тем, что в силу опасности предмета поиска антенна георадара не должен касаться грунта во избежание взрыва. Это существенно усложняет поиск мин СШП георадарами, по сравнению с поиском других объектов (трубопроводов, кабелей и т.п.). В результате “отрыва” антенны СШП георадара от грунта при зондировании возникает мощное отражение от поверхности грунта, значительно превосходящее амплитуду сигнала от подповерхностных объектов. Кроме того, имеет место прямая передача зондирующего сигнала непосредственно в приемный тракт георадара - “просак”, который также имеет большую амплитуду. Эти сигналы необходимо исключить из полезного сигнала. В прототипе эта задача решается за счет выключения приемного тракта на время прихода этих сигналов, т.е. за счет выбора окна приема (с использованием линии задержки). Однако длительность выключения должна зависеть от высоты антенны георадара над поверхностью грунта, которая неизвестна и меняется из-за действий оператора и рельефа грунта. При малых высотах антенны СШП георадара относительно грунта сигналы прямой передачи и отражения от поверхности могут накладываться друг на друга. Мина может располагаться на поверхности грунта или близко к ней, поэтому такой способ устранения сигнала поверхностного отражения приводит к возможности пропуска мины. Вид указанных выше сигналов существенно зависит от условий зондирования: характеристики грунта и окружающей среды, текущих параметров георадара и т.п. и заранее неизвестен. Таким образом, оценка и учет этих сигналов в реальных условиях поиска позволит повысить качество поиска мин.
Отраженный СШП сигнал в силу множества факторов оказывается в значительной степени “зашумлен” нестационарными помехами. В идеальных условиях СШП георадар способен построить абсолютно адекватное изображение объекта. Однако наличие помех существенно затрудняет решение этой задачи. Проблема состоит в увеличении соотношения сигнал/шум.
При поиске мин СШП георадарами фактически объектом поиска является участок грунта с аномальными электромагнитными характеристиками. Однако такими характеристиками обладают не только мины, но и камни, пучки травы и другие инородные включения. Основная проблема, стоящая перед оператором, состоит в дифференциации мин от прочих аномальных объектов. Эту задачу можно решать путем автоматического распознавания подповерхностного объекта (с использованием компьютерных методов обработки) или возложить ее на сапера. Каждый из вариантов имеет свои достоинства и недостатки. Поэтому разумным компромиссом является их сочетание. При этом необходимо выбрать средство общения (интерфейс) между георадаром и оператором. Обычно для этих целей в СШП георадарах качестве основного средства используется дисплей, на котором изображается подповерхностный объект. Дисплей располагается либо на шлеме сапера [ФИГ.4 - миноискатель CIMMD] или на штанге георадара [ФИГ.4 Миноискатель HSTAMIDS], [Патент РФ на промышленный образец № 46371, Прибор неразрушающего контроля]. Однако такой способ существенно отвлекает сапера от наблюдения за положением антенн георадара и поверхностью грунта.
Задача заявляемого способа состоит в повышении вероятности обнаружения мин СШП георадаром за счет более точного учета мешающих отражений и других помех, улучшении способов обработки отраженных сигналов, рационализации действий сапера по перемещению антенн СШП георадара при поиске мин.
Для решения этой задачи в способе поиска мин сверхширокополосным георадаром, заключающемся в том, что перед началом поиска мин оценивают и вводят в память георадара радиолокационные образы типовых мин и предполагаемые характеристики грунта в области поиска, зондируют с выбранным по времени разрешением грунт, для чего антенной георадара излучают сверширокополосный сигнал, принимают отраженный сигнал, нормируют с учетом затухания в грунте, сравнивают амплитуду отклика с установленным порогом обнаружения, при превышении установленного порога вырабатывают сигнал обнаружения аномалии и оценивают глубину ее залегания, перемещают антенну георадара, повторяя зондирование, до точки пропадания сигнала обнаружения аномалии, сканируют аномалию, для чего перемешают антенну георадара над аномалией, многократно повторяя зондирование, запоминают отклики, по которым оценивают характеристики аномалии, формируют ее радиолокационный образ, автоматически сравнивают его с радиолокационными образами типовых мин и идентифицируют мину, сообщают оператору результаты идентификации, по запросу оператора отображают радиолокационное изображение аномалии, глубину залегания и ее характеристики, дополнительно перед началом поиска мин зондируют пространство без грунта, выделяют и запоминают калибровочный сигнал прямой передачи источник излучения - приемник, зондируют грунт, заведомо не содержащий мин, выделяют и запоминают калибровочные сигналы, отраженные от поверхности грунта при разных высотах антенны георадара относительно грунта, при зондировании грунта принятые нормированные отраженные сигналы, полученные в нескольких последовательных зондированиях усредняют, оценивают текущую высоту антенны георадара относительно грунта по расстоянию между сигналами прямой передачи источник излучения - приемник и поверхностного отражения, вычитают из усредненного сигнала калибровочный сигнал прямой передачи источник излучения - приемник и калибровочный отклик от поверхности грунта с соответствующей высоты, полученный сигнал используют в качестве отклика, при обнаружении аномалии перемещают антенну георадара вдоль и поперек зоны поиска, определяют размеры аномалии, сканирование проводят над геометрическим центром обнаруженной аномалии.
Существенными отличиями заявляемого способа являются.
Зондирование перед началом поиска мин пространства без грунта, выделение и запоминание калибровочного сигнала прямой передачи источник излучения - приемник позволяет получить достаточно точный вид сигнала прямого просачивания в конкретных условиях поиска - состояния окружающей среды, аппаратуры георадара и т.п., а затем устранить влияние прямого просачивания на отраженный сигнал.
В прототипе сигнал прямого просачивания не принимают, что может привести к пропуску поверхностной мины.
Зондирование перед началом поиска мин грунта, заведомо не содержащего мин, выделение и запоминание калибровочных сигналов, отраженных от поверхности грунта при разных высотах антенны георадара относительно грунта позволяет получить типовые отклики от поверхности грунта в конкретных условиях поиска, а затем скомпенсировать влияние этого отражения.
В прототипе сигналы отражения от поверхности не принимаются, что может привести к пропуску поверхностной мины.
Усреднение сигналов, полученных в нескольких последовательных зондированиях, позволяет улучшить соотношение сигнал/шум.
Усреднение, как способ улучшения соотношения сигнал/шум, известно, однако в прототипе такая операция не производится.
Оценка текущей высоты антенны георадара относительно грунта по отраженному сигналу позволяет оперативно определить эту величину без дополнительных средств измерения и воспользоваться тем калибровочным сигналом отклика от поверхности, который соответствует этой высоте. Кроме того, оценка текущего положения антенны георадара относительно поверхности грунта позволяет с большей точностью оценить глубину залегания аномалии (мины), а также масштаб радиолокационного изображения.
В прототипе оценка высоты не производится, а контроль над высотой антенны по отношению к грунту возлагается на сапера.
Вычитание из нормированного отраженного сигнала калибровочного сигнала прямой передачи источник излучения - приемник позволяет исключить его из последующего анализа, а за счет этого повысить точность поиска.
В прототипе сигнал прямой передачи не принимается.
Вычитание из нормированного отраженного сигнала калибровочного отклика от поверхности грунта с соответствующей высоты позволяет исключить его из последующего анализа, а за счет этого повысить точность поиска.
В прототипе отклик от поверхности грунта не принимается.
Перемещение антенны георадара вдоль и поперек зоны поиска позволяет определить геометрические размеры подповерхностной аномалии, что само по себе является достаточно информативным показателем. Кроме того, оконтуривание аномалии позволяет определить ее геометрический центр.
В прототипе операция по оконтуриванию аномалии не предусматривается.
Сканирование над геометрическим центром обнаруженной аномалии позволяет получить отклики, а впоследствии радиолокационный образ наиболее информативной - центральной части мины, где практически всегда располагается взрыватель. Этот элемент дает очень яркую радиолокационную картину.
В прототипе сканирование обнаруженной аномалии производится в произвольном месте.
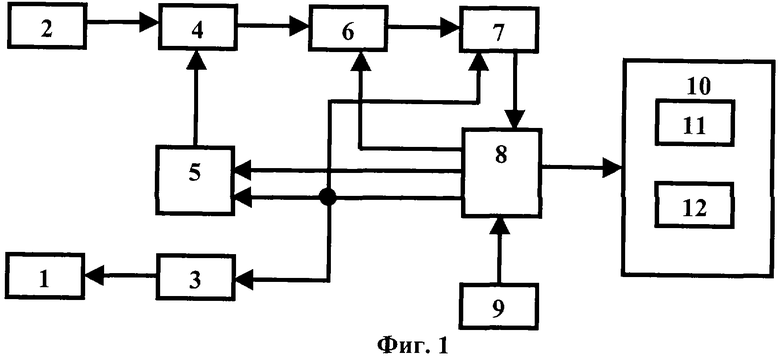
Схема устройства, реализующего заявляемый способ, представлена на фиг.1, где:
1. Передающая антенна.
2. Приемная антенна.
3. Формирователь СШП сигнала.
4. Смеситель.
5. Формирователь строба.
6. Усилитель.
7. Аналого-цифровой преобразователь (АЦП).
8. Компьютер.
9. Клавиатура.
10. Блок сигнализации и индикации.
11. Устройство звуковой сигнализации.
12. Дисплей.
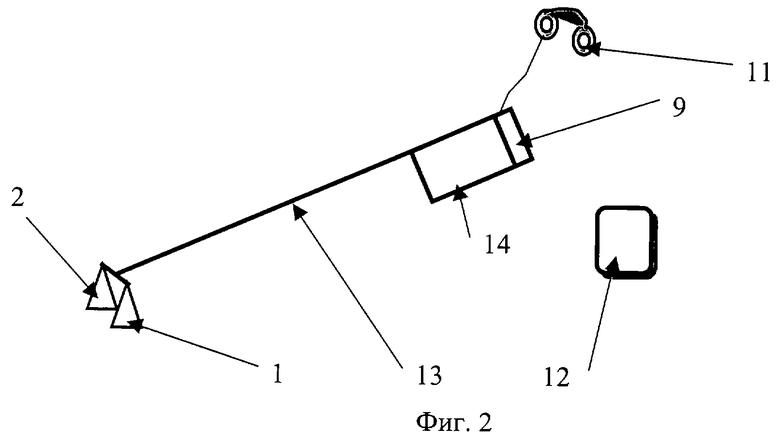
Конструктивное исполнение устройства, реализующего заявляемый способ, представлено на фиг.2, где:
13. Штанга.
14. Электронный блок.
На ФИГ.3 приведено изображение миноискателя CIMMD.
На ФИГ.4 приведено изображение миноискателя HSTAMID.
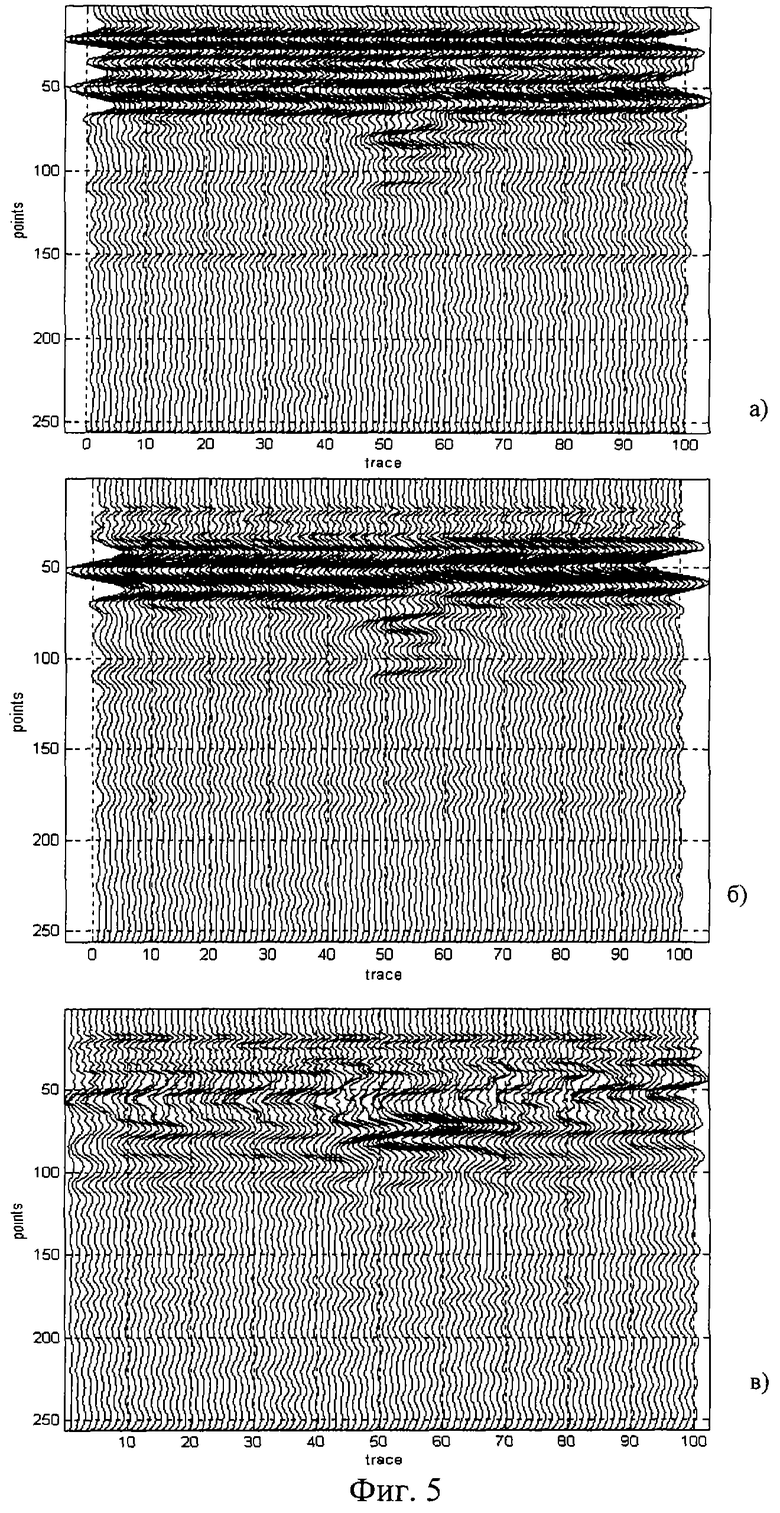
На ФИГ.5 приведены результаты зондирования грунта и основные этапы обработки отраженных сигналов.
Передающая антенна 1 предназначена для излучения зондирующего СШП сигнала, поступающего от формирователя СШП сигнала 3. Приемная антенна 2 предназначена для приема отраженного сигнала. Смеситель 4 предназначен для выборки из отраженного сигнала одного отсчета. Формирователь строба 5 предназначен для выработки сдвинутых по времени стробирующих сигналов, задающих момент выборки отсчета отраженного сигнала. Усилитель 6 предназначен для усиления амплитуды отсчета отраженного сигнала с учетом затухания, таким образом, усилитель 6 производит нормировку отраженного сигнала. Аналого-цифровой преобразователь (АЦП) 7 осуществляет преобразование отсчета в цифровую форму. На входе АЦП 7 находится устройство выборки и хранения, которое фиксирует входной аналоговый сигнал по управляющему сигналу Y. Компьютер 8 осуществляет управление устройствами излучения и приема сигналов и обработку результатов поиска. Клавиатура 9 предназначена для задания исходных данных для работы георадара и управления режимами работы. Блок сигнализации и индикации 10 предназначен для информирования сапера о результатах поиска и содержит звуковую сигнализацию 11 (наушники) и дисплей 12.
Штанга 13 предназначена для манипулирования антеннами георадара сапером. С одной стороны к штанге прикреплены излучающая 1 и приемная 2 антенны, с другой - электронный блок 12, в котором размещены: формирователь СШП сигнала 3, смеситель 4, формирователь строба 5, усилитель 6, аналого-цифровой преобразователь 7 и компьютер. К электронному блоку 12 прикреплена клавиатура 9. Звуковая сигнализация 13, например наушники, предназначены для информирования сапера об обнаружении аномалии. Дисплей 14 по запросу оператора отображает радиолокационное изображение и другую информацию о подповерхностном объекте. Особенностью данного конструктивного исполнения СШП георадара является отсутствие проводной связи дисплея с остальными частями георадара. Эта связь осуществляется по радиоканалу. Данный факт является принципиальным, т.к. основным средством общения сапера с георадаром является сигнализация (наушники 11) и средства автоматизированного обнаружения и идентификации мины. Радиолокационное изображение подповерхностного объекта выводится на дисплей и используется сапером только “по запросу”, если в этом возникает необходимость. Такой подход позволяет устранить из поля зрения сапера дисплей, который в обычном режиме поиска мин находится в кармане или ранце сапера. При этом внимание сапера сосредотачивается на области поиска, в том числе с возможностью визуального обнаружения признаков мины (нарушение поверхностного слоя грунта, растяжки и т.п.).
Рассмотрим процесс зондирования СШП георадаром.
В качестве зондирующего сигнала на всех этапах поиска мин СШП георадаром может использоваться перепад напряжения с длительностью фронта в единицы пикосекунд. Этот сигнал обладает очень широким спектром (СШП сигнал), а отраженный сигнал содержит огромное количество информации о подповерхностном объекте, однако прием таких сигналов в реальном масштабе времени современными техническими средствами невозможен. Для разрешения этой проблемы используют стробоскопические преобразователи [Рябинин Ю.А. Стробоскопическое осциллографирование. - Москва, "Сов. радио", 1972 г.]. Такие преобразователи позволяют выбрать из каждой реализации отраженного сигнала один отсчет. Этот отсчет можно запомнить и преобразовать в цифровую форму при помощи технически реализуемых (достаточно медленных) аналого-цифровых преобразователей и ввести в компьютер соответствующий код (что происходит тоже не быстро) для последующей обработки. Повторяя зондирование с относительно низкой частотой (обычно - десятки, сотни килогерц) и сдвигая точку выборки, можно получить множество отсчетов отраженного сигнала si, т.е. принять отраженный сигнал S={s1,...,sN}. В результате такого масштабно-временного преобразования открывается возможность реализовать сложные алгоритмы обработки очень “быстрых” СШП сигналов в “медленном” компьютере, но не в реальном масштабе времени.
При технической реализации процесс зондирования происходит следующим образом. Компьютер 8 перед началом зондирования через первый порт передает код на формирователь строба 5, устанавливающий нулевой t1 сдвиг точки выкусывания отсчета по отношению к зондирующему сигналу. Через второй порт компьютер 8 передает в усилитель код коэффициента усиления k1 на усилитель 6. По управляющему сигналу Y из третьего порта компьютера 8 формирователь 3 вырабатывает СШП сигнал, который поступает и излучается антенной 1. По этому же управляющему сигналу Y запускается формирователь строба 5, который подает стробирующий сигнал на управляющий вход смесителя 4. Отраженный СШП сигнал поступает на приемную антенну 2, а с нее на сигнальный вход смесителя 4. В результате на выходе последнего появляется первый отсчет отраженного сигнала s1, который усиливается в блоке 6. По управляющему сигналу Y усиленный сигнал запоминается в АЦП 7 и после аналого-цифрового преобразования код через соответствующий порт считывается компьютером 8. После приема первого отсчета s1 компьютер 8 через первый порт передает другой код t2 в формирователь строба 5, т.е. изменяет положение строба по отношению к зондирующему сигналу, в результате точка выборки отраженного сигнала смещается. Через второй порт компьютера 8 устанавливается другой коэффициент к2 усиления усилителя 6, так, чтобы сигналы, отраженные от близких и удаленных объектов, имели одинаковый динамический диапазон. После этого по управляющему сигналу Y с третьего порта компьютера 8 запускается процесс приема следующего отсчета s2 отраженного сигнала и т.д. После сотен (тысяч) повторений в компьютер 8 будут введены все отсчеты S={s1,...,sN} отраженного сигнала с выбранным разрешением с точностью до масштабно-временного преобразования. Количество отсчетов и периодичность посылки зондирующих сигналов выбирается из следующих противоречивых условий:
- Увеличение числа отсчетов N отраженного сигнала повышает точность восстановления отраженного сигнала и качество обнаружения мины.
- Максимальная частота выборки отсчетов определяются быстродействием аналого-цифрового преобразователя 7 и компьютера 8.
- Для улучшения соотношения сигнал/шум необходимо провести несколько зондирований из одной и той же точки и усреднить результаты.
- Антенны 1, 2 георадара при поиске мины перемещаются, что приводит к смещению точки зондирования и соответствующей апертурной погрешности, снижающей точность.
На современном уровне развития микроэлектроники реальными являются следующие параметры зондирования:
- Частота посылки зондирующих сигналов: десятки-сотни килогерц.
- Количество отсчетов в одном зондировании: сотни - тысячи.
- Количество зондирований для усреднения: десятки.
Реализация заявляемого способа поиска мин СШП георадаром заключается в следующем.
Перед началом поиска мин вводят в память компьютера 8 радиолокационные образы типовых мин. В простейшем варианте такие изображения могут представлять собой бинарные или многоуровневые растровые изображения [Рудаков П.И., Сафонов В.И. Обработка сигналов и изображений MATLAB 5X. Под ред. Потешкина В.Г., М.: Диалог МИФИ. 2000. - 416 стр.], стр.382-385. В случае бинарного изображения матрица содержит единицы в тех элементах, где сигнал, отраженный от типовой мины, превышает установленный порог обнаружения аномального объекта. При многоуровневом изображении каждый элемент матрицы пропорционален амплитуде отраженного сигнала. Однако такой вариант требует хранения большого количества радиолокационных изображений разных мин, при различных ракурсах и масштабах, а также существенно усложняет идентификацию мины. Для уменьшения объема хранимой в компьютере информации и упрощения процесса идентификации в состав радиолокационного образа мины помимо матрицы растрового изображения могут вводиться и обобщенные признаки [там же, стр.385-387], такие как эквивалентный диаметр мины, соотношение между осями симметрии и другие.
Перед началом поиска мин оценивают и через клавиатуру 8 вводят в память компьютера 8 предполагаемые характеристики грунта в области поиска. Задачей этого этапа является задание электромагнитных характеристик грунта для последующей обработки. Грунты, отличающиеся влажностью (сухой или мокрый), типом (песок, глина и другие), имеют разные свойства, которые влияют на распространение зондирующих сигналов. Оценка характеристик грунта может быть произведена на основе опыта сапера или инструментальным путем, например, поместив калибровочную меру в грунт на известную глубину, проводят зондирование и определяют электромагнитные характеристики грунта.
Зондируют пространство без грунта, что позволяет оценить текущие свойства георадара с точки зрения формы и амплитуды сигнала прямого просачивания зондирующего сигнала из передающего в приемный тракт. Этот сигнал легко выделить, поскольку при зондировании воздуха отражения от других объектов отсутствуют. Калибровочный сигнал прямой передачи источник излучения - приемник Sпп запоминают в компьютере 8.
Зондирование грунта, заведомо не содержащего мин, при разных (известных) высотах антенн 1 и 2 георадара относительно грунта в области поиска, позволяет оценить форму и амплитуду сигналов, отраженных от поверхности грунта Sнгi. При известных форме и амплитуде сигнала прямого просачивания и отсутствии (малой амплитуде) сигналов от других подповерхностных объектов, выделить такой сигнал можно достаточно легко - путем вычитания в компьютере 8 калибровочного сигнала прямого просачивания из сигнала поверхностного отражения. Калибровочные сигналы отражения от поверхности грунта запоминают в компьютере 8.
После окончания подготовительных операций приступают к зондированию области поиска. Для этого сапер включает при помощи клавиатуры 9 режим поиска и, держась за штангу 13, перемещает антенны 1 и 2 георадара в области поиска (см. фиг.2). При этом в соответствии с приведенным выше описанием компьютер 8 начинает процесс зондирования (многократно запускает излучение зондирующих СШП сигналов с помощью формирователя 3 и антенны 1, антенна 2 принимает отраженные сигналы, смеситель 4 выкусывает отсчеты по стробирующим сигналам с формирователя 5 и т.д.). В усилителе 6 принятые отраженные сигналы нормируются так, чтобы обеспечить одинаковый динамический диапазон отраженных сигналов, поступивших с разных глубин. АЦП 7 преобразует отсчет в цифровую форму, компьютер 8 считывает его и записывает в запоминающее устройство. В результате повторения этой процедуры в памяти компьютера оказывается совокупность S={s1,...,sN) из N отсчетов отраженного сигнала, полученных в результате N кратного излучения зондирующих сигналов.
Повторяют зондирование несколько (К) раз и в компьютере 8 усредняют нормированные отраженные сигналы S, полученные в нескольких последовательных зондированих, путем сложения соответствующих отсчетов и деления на число зондирований (К). В результате получают сигнал Sср.
Из полученного сигнала Scp вычитают калибровочный сигнал прямой передачи источник излучения - приемник Sпп и получают сигнал Scp-пп.
Оценивают текущую высоту антенны георадара относительно грунта. Для этого оценивают временной интервал между сигналами прямого просачивания и поверхностного отражения и по известной скорости распространения сигнала рассчитывают высоту антенн георадара над грунтом.
Вычитают калибровочный отклик Sпri от поверхности грунта с соответствующей высоты из поученного в предыдущем пункте Scp-пп, и получают “чистый” сигнал, отраженный от подповерхностных объектов Sобъекта=Scp-пп-Sпгi.
На фиг.5а приведены результаты многократного зондирования СШП георадаром. Здесь присутствуют сигналы прямого просачивания и отражения от поверхности. На фиг.5б представлен результат устранения сигнала прямого просачивания. На фиг.5в приведены результаты устранения сигнала отражения от поверхности. Здесь достаточно четко видны отражения от подповерхностной аномалии.
Сравнивают амплитуду отклика (отсчетов Sобъекта) с установленным порогом обнаружения Sпорог. Порог обнаружения Sпорог устанавливается исходя из свойств грунта, заданных при подготовке к поиску мин.
При превышении установленного порога Sпорог через устройство звуковой сигнализации 11 сообщают саперу об обнаружении аномалии.
Оценка глубины залегания осуществляется путем измерения временного интервала от момента излучения зондирующего сигнала до приема сигнала, отраженного от аномалии, учета времени распространения сигнала в воздухе и расчета глубины залегания при известной скорости распространения.
Перемещают антенну георадара над аномалией, повторяя зондирование, до точки пропадания сигнала обнаружения аномалии, что позволяет оценить начало и конец аномалии в выбранном направлении перемещения.
Аналогичные действия при движении антенн 1,2 георадара вдоль и поперек зоны поиска позволяет оконтурить аномалию и оценить ее геометрические размеры, что является достаточно информативной характеристикой подповерхностного объекта. В частности, можно определить положение ее геометрического центра.
Для сканирования аномалии сапер переводит георадар в этот режим, используя клавиатуру 9. Сущность сканирования заключается в перемещении антенн 1,2 георадара над аномалией и многократном зондировании грунта с запоминанием откликов.
Сканирование проводят над геометрическим центром обнаруженной аномалии. Такой способ позволяет провести исследование наиболее информативной части мины, где обычно располагается взрыватель. Достаточно сложная форма и структура взрывателя дает очень яркую картину радиолокационного отклика, облегчающую дифференциацию мины от других подповерхностных объектов, а также идентификацию типа мины.
По результатам сканирования оценивают характеристики мины. В частности, по характеру отклика, в частности по амплитуде отклика можно оценить электромагнитные свойства подповерхностного объекта и соответственно определить его тип: металл, пластик и т.п.
Формируют радиолокационный образ, так же, как это было описано выше.
Автоматическое сравнение полученного радиолокационного образа подповерхностного объекта с радиолокационными образами типовых мин может производиться известными методами, например, [Абламейко С.В. и др. Обработка изображений: технология, методы, применение. Учебное пособие - Мн., Амалфея. 2000, 304 стр.], стр.137-141 путем предварительного сравнения признаков объекта, указанных выше, а затем корреляционными методами сравнения по растровым изображениям.
Сообщают оператору результаты идентификации через звуковую сигнализацию 15. Результатом идентификации может быть голосовое сообщение о типе обнаруженной мины или о том, что объект не опознан.
В последнем случае оператор, через клавиатуру 9 запрашивает радиолокационное изображение подповерхностного объекта. В качестве него может быть использовано растровое изображение, преобразованное в яростную или цветовую палитру. Получив изображение, глубину залегания и другие характеристики аномалии, оператор оценивает его и принимает решение о характере аномалии и о необходимых действиях.
Реализация заявляемого способа позволяет следующее.
- Достаточно точно учесть и исключить из дальнейшего рассмотрения очень сильные сигналы прямого просачивания и поверхностного отражения, что позволяет с удовлетворительной точностью анализировать сигналы, отраженные от подповерхностных объектов.
- Оценить текущую высоту антенн георадара относительно грунта, а за счет этого точнее определить глубину залегания подповерхностного объекта (мины).
- Повысить качество радиолокационных изображений и улучшить условия распознавания подповерхностных объектов за счет усреднения откликов.
- Получить и построить радиолокационное изображение наиболее информативной средней части подповерхностного объекта части, что повышает вероятность распознавания мины. Таким образом, заявляемый способ позволяет повысить точность обнаружения мин.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОСТРОЕНИЯ ИЗОБРАЖЕНИЯ ПОДПОВЕРХНОСТНОГО ОБЪЕКТА | 2008 |
|
RU2401439C2 |
| СПОСОБ ПОДПОВЕРХНОСТНОГО ЗОНДИРОВАНИЯ | 2009 |
|
RU2393501C1 |
| СПОСОБ ПОВЫШЕНИЯ РАЗРЕШАЮЩЕЙ СПОСОБНОСТИ РАДИОЛОКАЦИОННОГО СВЕРХШИРОКОПОЛОСНОГО ЗОНДИРОВАНИЯ | 2007 |
|
RU2348945C1 |
| Способ измерения параметров слоев дорожной одежды | 2019 |
|
RU2735312C1 |
| Способ зондирования лунного грунта | 2017 |
|
RU2667695C1 |
| Способ обнаружения границы локального подземного торфяного пожара и робот для проведения разведки подземных торфяных пожаров | 2016 |
|
RU2625602C1 |
| МИНОИСКАТЕЛЬ | 2010 |
|
RU2451953C1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА ПОДПОВЕРХНОСТНЫХ ОБЪЕКТОВ | 2019 |
|
RU2739023C1 |
| Способ обнаружения границы локального подземного торфяного пожара и способ доставки на поверхность торфяника портативного георадара и приёма данных зондирования в режиме реального времени | 2016 |
|
RU2647221C2 |
| ГЕОФИЗИЧЕСКИЙ РАДИОЛОКАТОР | 1996 |
|
RU2105330C1 |
Изобретение относится к разведке или обнаружению подповерхностных объектов с использованием сверхширокополосных (СШП) зондирующих сигналов. Изобретение может быть использовано для обнаружения и идентификации мин и других объектов, расположенных как на поверхности, так и в глубине грунта. Согласно заявленному способу перед началом поиска мин выделяют и запоминают калибровочные сигналы прямой передачи источник излучения - приемник, а также сигналы, отраженные от поверхности грунта при разных высотах антенны георадара. При зондировании оценивают высоты антенн георадара относительно грунта, вычитают из полученного отклика калибровочные сигналы. Оконтуривают обнаруженную аномалию, сканируют ее в центральной части и строят радиолокационное изображение, которое сравнивают с типовыми образами мин. Технический результат: повышение качества обнаружения и идентификации мин. 5 ил.
Способ поиска мин сверхширокополосным георадаром, заключающийся в том, что перед началом поиска мин оценивают и вводят в память георадара радиолокационные образы типовых мин и предполагаемые характеристики грунта в области поиска, зондируют с выбранным по времени разрешением грунт, для чего антенной георадара излучают сверхширокополосный сигнал, принимают отраженный сигнал, нормируют с учетом затухания в грунте, сравнивают амплитуду отклика с установленным порогом обнаружения, при превышении установленного порога вырабатывают сигнал обнаружения аномалии и оценивают глубину ее залегания, перемещают антенну георадара, повторяя зондирование, до точки пропадания сигнала обнаружения аномалии, сканируют аномалию, для чего перемещают антенну георадара над аномалией, многократно повторяя зондирование, запоминают отклики, по которым оценивают характеристики аномалии, формируют ее радиолокационный образ, автоматически сравнивают его с радиолокационными образами типовых мин и идентифицируют мину, сообщают оператору результаты идентификации, по запросу оператора отображают радиолокационное изображение аномалии, глубину залегания и ее характеристики, отличающийся тем, что перед началом поиска мин зондируют пространство без грунта, выделяют и запоминают калибровочный сигнал прямой передачи источник излучения - приемник, зондируют грунт, заведомо не содержащий мин, выделяют и запоминают калибровочные сигналы, отраженные от поверхности грунта при разных высотах антенны георадара относительно грунта, при зондировании грунта принятые нормированные отраженные сигналы, полученные в нескольких последовательных зондированиях, усредняют, оценивают текущую высоту антенны георадара относительно грунта по расстоянию между сигналами прямой передачи источник излучения - приемник и поверхностного отражения, вычитают из усредненного сигнала калибровочный сигнал прямой передачи источник излучения - приемник и калибровочный отклик от поверхности грунта с соответствующей высоты, полученный сигнал используют в качестве отклика, при обнаружении аномалии перемещают антенну георадара вдоль и поперек зоны поиска, определяют размеры аномалии, сканирование проводят над геометрическим центром обнаруженной аномалии.
| ГЕОФИЗИЧЕСКИЙ РАДИОЛОКАТОР | 1996 |
|
RU2105330C1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА И ИДЕНТИФИКАЦИИ ПЛАСТИКОВЫХ МИН | 2002 |
|
RU2206907C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МИН В ПОЧВЕ | 1997 |
|
RU2122224C1 |
| US 5245588 А, 14.09.1993. | |||

