Изобретение относится к аэрокосмической технике, в частности к летательным аппаратам для полета в пограничной зоне верхней атмосферы и ближнего космоса.
Известен способ пилотирования гиперзвуковых, суборбитальных и космических летательных аппаратов с использованием волнообразной траектории с рикошетом от атмосферы (патент РФ №1811129) [1]. На фазе отражения от атмосферы осуществляется активный рикошет за счет создания импульса тяги при оптимальном угле атаки, затем на угле атаки, соответствующем максимальному аэродинамическому качеству, под действием аэродинамических сил летательный аппарат выводится на следующую баллистическую фазу. Недостатком такого способа является необходимость использования двигателя для компенсации аэродинамических потерь при погружении в атмосферу.
Известны гиперзвуковые аэрокосмические системы (Программа "X-15" / А.Железняков. Энциклопедия "Космонавтика") [2]. Эти системы используют планирующую траекторию. Недостатком таких систем является то, что температура под теплозащитной оболочкой при равновесном планировании выше, чем при рикошетирующем спуске, что требует увеличения массы теплозащиты и конструкции в целом.
Наиболее близким к предлагаемому изобретению является аэрокосмический самолет X-20, выполненный по схеме «летающее крыло», интегрированное с фюзеляжем, с двойным стреловидным вертикальным оперением и рулями управления, с нанесенным на его поверхность теплозащитным покрытием (X-20 Dyna Soar, США / К десятилетию полета Бурана. «Энциклопедия астронавтики» М.Уэйда) [3]. Недостатками известного планирующего аэрокосмического летательного аппарата являются ограниченные возможности для осуществления рикошетирующего полета в пограничной зоне верхней атмосферы и ближнего космоса, прогрессирующий разогрев поверхности летательного аппарата при монотонном планирующем спуске в атмосфере, что требует увеличения массы тепловой защиты аппарата, ограниченная дальность полета.
Технической задачей данного изобретения является увеличение дальности полета гиперзвукового высотного аэрокосмического летательного аппарата авиационно-ракетного старта, способного осуществлять полет по рикошетирующей траектории, и увеличение полезной нагрузки за счет снижения массы тепловой защиты.
Поставленная задача достигается тем, что в конструкции летательного аппарата, выполненного по схеме «летающее крыло», интегрированное с фюзеляжем, с двойным стреловидным вертикальным оперением и рулями управления, с нанесенным на его поверхность теплозащитным покрытием, согласно изобретению крыло выполнено с большой стреловидностью, имеет прямой и обратный клиновидный профиль с максимумом в середине хорды, фюзеляж имеет веретенообразную форму, при этом угол конусности носовой части выбран таким, чтобы фюзеляж находился в теневой аэродинамической зоне крыла, передние кромки носовой части фюзеляжа, крыла и вертикального оперения выполнены затупленными, причем минимальный радиус затупления выбран в соответствии с допустимыми тепловыми нагрузками на поверхность аппарата. Оптимальные значения стреловидности крыла лежат в диапазоне 70…76°, а угол конусности фюзеляжа в вертикальном и горизонтальном сечениях лежит в диапазоне 6…10°.
Поставленная задача также достигается тем, что полет аппарата в атмосфере и ближнем космосе осуществляют по рикошетирующей траектории с начальным углом бросания в диапазоне 5-8°, скорости в диапазоне 6500-7500 м/с, обеспечивающей за счет циклической нагрузки "нагрев-охлаждение" поверхности аппарата минимальную массу теплозащиты.
Поставленная задача также достигается тем, что при заданных начальной скорости, высоте полета и угле бросания используют программируемую амплитуду рикошетирования, при этом на этапе погружения в атмосферу изменение вектора аэродинамической силы осуществляют путем выбора оптимального угла атаки, соответствующего достижению максимальной дальности полета аппарата.
Поставленная задача также достигается тем, что случайный разброс параметров траектории по высоте, дальности и курсу, вызванный разбросом начальных условий выведения, текущим отклонением полетных характеристик, сезонных, широтных, суточных вариаций параметров атмосферы и ветра, компенсируют аэродинамическими маневрами на крейсерском и завершающем участках полета в диапазоне располагаемого аэродинамического качества, связывая программу управления с конкретными условиями полета, для чего строят прогноз точек прицеливания (выхода в конечную зону).
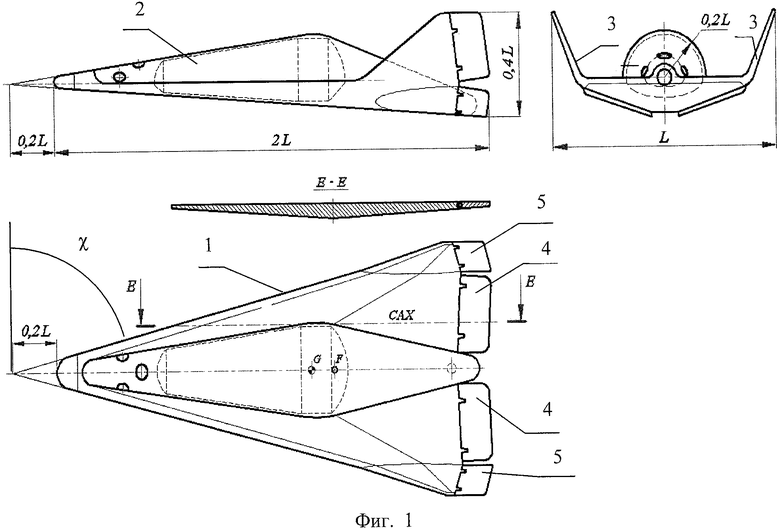
На фиг.1 изображена аэродинамическая схема предложенного гиперзвукового аэрокосмического летательного аппарата, где безразмерные параметры аппарата отнесены к размаху крыла L.
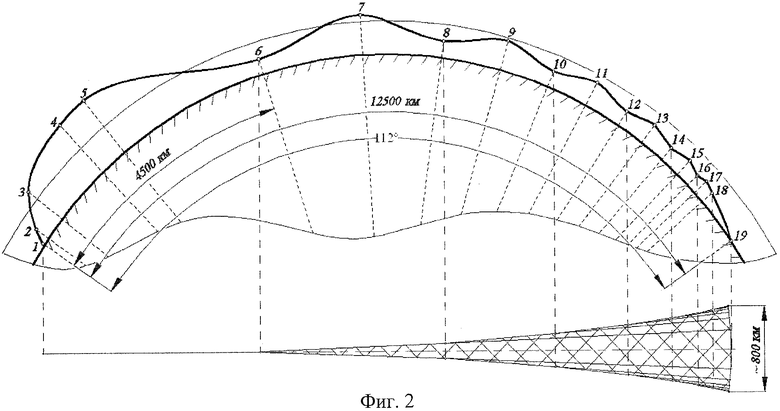
На фиг.2 изображена траектория полета аэрокосмического летательного аппарата.
Аппарат выполнен по схеме "летающее крыло" - "низкоплан" с крылом большой стреловидности 1, интегрированным с фюзеляжем 2, с расположенным по концевым хордам крыльев двойным вертикальным оперением 3. В кормовой части крыла расположены элевоны 4, на вертикальном оперении 3 - рули направления 5. Фюзеляж 2 выполнен веретенообразной формы. Передние кромки крыла и носовая часть фюзеляжа выполнены затупленными. Угол стреловидности крыла составляет χ=70…76°. Крыло имеет прямой и обратный клиновидный профиль (сечение "Е-Е", фиг.1). Угол конусности фюзеляжа в вертикальном и горизонтальном сечениях лежит в диапазоне θ=6…10°. Нижняя поверхность крыла, носовой обтекатель фюзеляжа, вертикальное оперение и рули управления защищены теплозащитным покрытием.
Аэродинамическая схема аппарата позволяет достичь аэродинамического качества К=2,0…2,25 и удельной нагрузки на крыло ρx=250…350 кг/м2.
Полет аэрокосмического аппарата осуществляется следующим образом.
С помощью самолета-носителя аэрокосмический летательный аппарат выводят в точку начала автономного полета (точка 2 на фиг.2). После отделения от самолета-носителя на заданной высоте, при заданной скорости и угле бросания и полета в плотных слоях атмосферы (участок 2-3 на фиг.2) аппарат выходит на восходящую ветвь баллистической фазы полета, достигает максимальной высоты над поверхностью Земли и переходит на снижающуюся ветвь полета. В точке максимальной высоты полета (точка 4 на фиг.2) проводят измерения параметров траектории и расчетным путем определяют программу изменения угла атаки аппарата на фазе погружения в атмосферу из условия допустимого аэродинамического нагрева и обеспечения максимальной дальности полета. При погружении в плотные слои атмосферы путем выбора оптимального угла атаки осуществляют изменение вектора аэродинамической силы, обеспечивающее поворот вектора скорости аппарата. Аппарат по нисходящей ветви фазы погружения в атмосферу достигает точки минимальной высоты над Землей (точка 6 фиг.2), затем по восходящей ветви траектории выходит из плотных слоев атмосферы. После завершения фазы погружения в атмосферу аппарат вновь выходит на баллистическую фазу полета. Таким образом формируется рикошетирующая траектория с периодическим чередованием фаз баллистического полета и погружения в атмосферу с монотонно снижающимися границами волн (на фиг.2 точки 5, 7, 9, 11, 13, 15, 17, соответствующие максимальной высоте полета, и точки 6, 8, 10, 12, 14, 16, соответствующие минимальной высоте полета). При этом на фазе погружения в атмосферу происходит периодический нагрев поверхности летательного аппарата и ее охлаждение на баллистической фазе.
Реальная траектория полета отличается от расчетной (номинальной) при воздействии случайных факторов полета.
Номинальную рикошетирующую траекторию корректируют за счет управления аэродинамической силой, для чего на баллистической фазе полета проводят траекторные измерения, с учетом которых на фазе погружения в атмосферу производят коррекцию траектории. Коррекция траектории компенсирует отклонение аэробаллистических характеристик летательного аппарата от номинальных значений, влияние разброса начальных траекторных параметров и возмущений атмосферы (сезонно-широтных, суточных и случайных вариаций плотности и поля ветров) на траекторию полета.
На завершающем участке траектории продольный и курсовой разброс прогнозируемой точки прицеливания (точка 19 на фиг.2) компенсируют аэродинамическим маневром.
Маневр осуществляют путем изменения угла крена аппарата. Точка начала маневра (точка 18 на фиг.2) и угол крена, выбираемый в соответствии с навигационной информацией, компенсирует случайные разбросы координат точки прицеливания.
Предлагаемое изобретение характеризуется более высокими техническими показателями по сравнению с известными техническими решениями.
Выбранная аэродинамическая схема аппарата, позволяющая достичь аэродинамического качества К=2,0…2,25 и удельной нагрузки на крыло ρx=250…350 кг/м2, дает возможность использовать рикошетирующие траектории полета, более эффективные по сравнению с планирующими траекториями. Обеспечение повышенного аэродинамического качества на гиперзвуковых режимах полета достигается геометрией фюзеляжа, расположением его в теневой области крыла, общей компоновкой аппарата, выбором угла стреловидности, наличием передних кромок крыла и носовой части с малыми радиусами затупления.
По тепловым нагрузкам рикошетирующая траектория полета также имеет преимущество. Максимальная температура на поверхности аппарата при монотонном планировании ниже, чем при рикошетирующем полете, однако интегральный внутренний тепловой поток существенно выше. Расчетная температура под теплозащитной оболочкой при рикошетирующем спуске оказывается ниже, чем при монотонном планировании, что позволяет уменьшить массу теплозащиты и конструкции в целом. В конце маршевого полета достигается снижение температуры конструкции в характерных точках крыла на ~200°C по сравнению с планирующей системой. В результате возможно использование в качестве тепловой защиты облегченного двухслойного теплозащитного покрытия и конструкции аппарата на базе алюминиево-магниевых сплавов. По сравнению с классическим планированием масса теплозащиты снижается на ~20%.
Увеличение дальности полета гиперзвукового аэрокосмического летательного аппарата авиационно-ракетного старта, способного осуществлять полет по рикошетирующей траектории, достигается за счет повышенных аэробаллистических характеристик (аэродинамического качества и удельной нагрузки на крыло). По сравнению с монотонным планированием дальность полета увеличивается более чем на 30%. При повышенной полезной отдаче аппарата обеспечиваются расчетные параметры выхода в зону прецизионного маневрирования на конечном участке.
Источники информации
1. Патент РФ №1811129.
2. Программа "X-15" / А.Железняков. Энциклопедия "Космонавтика".
3. X-20 Dyna Soar, США / К десятилетию полета Бурана. «Энциклопедия астронавтики» М.Уэйда.
| название | год | авторы | номер документа |
|---|---|---|---|
| СВЕРХЗВУКОВОЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ И СПОСОБ РЕАЛИЗАЦИИ ЕГО ПОЛЕТА | 2015 |
|
RU2619361C2 |
| СПОСОБ РАЗВЕРТЫВАНИЯ И ВЫСОТНОЙ ПОДВЕСКИ ИНФОРМАЦИОННОЙ СИСТЕМЫ И НЕСУЩИЙ АЭРОДИНАМИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2392188C1 |
| КОСМИЧЕСКИЙ АППАРАТ ДЛЯ СПУСКА С ОРБИТЫ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ И СПОСОБ ЕГО СПУСКА С ОРБИТЫ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 2005 |
|
RU2334656C2 |
| КОСМИЧЕСКИЙ ГИПЕРЗВУКОВОЙ КОМПЛЕКС | 1976 |
|
SU1826442A1 |
| КОСМИЧЕСКИЙ АППАРАТ ДЛЯ СПУСКА В АТМОСФЕРЕ ПЛАНЕТЫ И СПОСОБ СПУСКА КОСМИЧЕСКОГО АППАРАТА В АТМОСФЕРЕ ПЛАНЕТЫ | 1994 |
|
RU2083448C1 |
| СПОСОБ ВЫВЕДЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ В КОСМОС МНОГОРАЗОВОЙ ТРАНСПОРТНО-КОСМИЧЕСКОЙ СИСТЕМОЙ (ВАРИАНТЫ) | 2006 |
|
RU2331551C2 |
| СПОСОБ ВЫВЕДЕНИЯ КОСМИЧЕСКИХ ОБЪЕКТОВ НА ОКОЛОЗЕМНУЮ ОРБИТУ И МНОГОРАЗОВЫЙ СОСТАВНОЙ АЭРОКОСМИЧЕСКИЙ РАКЕТНЫЙ САМОЛЕТ-НОСИТЕЛЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (АЭРОКОСМИЧЕСКАЯ СИСТЕМА " НУР-САИД") | 2001 |
|
RU2232700C2 |
| РАКЕТА-НОСИТЕЛЬ | 2011 |
|
RU2482030C2 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2009 |
|
RU2409504C1 |
| КОСМОЛЕТ МЕСТОНА И СИСТЕМА АВАРИЙНОГО СПАСЕНИЯ ЭКИПАЖА | 1992 |
|
RU2015080C1 |
Изобретение относится к аэрокосмической технике и может использоваться для доставки различных полезных нагрузок в отдаленные точки поверхности Земли с применением авиационно-ракетного старта. Летательный аппарат (ЛА) выполнен по схеме «летающее крыло» с двойным стреловидным вертикальным оперением и рулями управления. Крыло ЛА имеет большую стреловидность (70-76°) и выполнено с прямым и обратным клиновидным профилем, максимальная толщина которого приходится на середину хорды. Фюзеляж имеет веретенообразную форму, причем угол конусности (6-10°) его носовой части выбран так, чтобы фюзеляж находился в зоне аэродинамической тени крыла на режимах гиперзвукового полета. На поверхность ЛА нанесено теплозащитное покрытие, причем передние кромки носовой части фюзеляжа, крыла и вертикального оперения выполнены затупленными. Полет аппарата осуществляют по программируемой рикошетирующей траектории с начальным углом бросания в диапазоне 5-8° и скорости в диапазоне (6500-7500) м/с. На этапе погружения в атмосферу изменение вектора аэродинамической силы осуществляют путем выбора оптимального угла атаки. Случайный разброс параметров траектории компенсируют аэродинамическими маневрами на крейсерском и завершающем участках в диапазоне располагаемого аэродинамического качества. Программу управления строят на основе прогноза точек прицеливания (выхода в конечную зону). Технический результат изобретения направлен на повышение дальности полета за счет управления на этапе погружения в атмосферу и обеспечение минимальной массы теплозащиты за счет циклического охлаждения нагретой в плотных слоях атмосферы конструкции поверхности аппарата. 2 н. и 4 з.п. ф-лы, 2 ил.
1. Гиперзвуковой аэрокосмический летательный аппарат, выполненный по схеме «летающее крыло», интегрированное с фюзеляжем, с двойным стреловидным вертикальным оперением и рулями управления, с нанесенным на его поверхность теплозащитным покрытием, отличающийся тем, что крыло летательного аппарата выполнено с большой стреловидностью, имеет прямой и обратный клиновидный профиль с максимумом в середине хорды, фюзеляж имеет веретенообразную форму, при этом угол конусности его носовой части выбран таким, чтобы фюзеляж находился в теневой аэродинамической зоне крыла, передние кромки носовой части фюзеляжа, крыла и вертикального оперения выполнены затупленными, причем минимальный радиус затупления выбран в соответствии с допустимыми тепловыми нагрузками на поверхность аппарата.
2. Гиперзвуковой аэрокосмический летательный аппарат по п.1, отличающийся тем, что угол стреловидности крыла лежит в диапазоне 70-76°.
3. Гиперзвуковой аэрокосмический летательный аппарат по п.1, отличающийся тем, что угол конусности фюзеляжа в вертикальном и горизонтальном сечениях лежит в диапазоне 6-10°.
4. Способ реализации полета летательного аппарата по п.1, отличающийся тем, что полет аппарата в атмосфере и ближнем космосе осуществляют по рикошетирующей траектории с начальным углом бросания в диапазоне 5-8°, скорости в диапазоне (6500-7500) м/с, обеспечивающей за счет циклической нагрузки "нагрев-охлаждение" поверхности аппарата минимальную массу теплозащиты.
5. Способ по п.4, отличающийся тем, что при заданных начальной скорости, высоте полета и угле бросания используют программируемую амплитуду рикошетирования, при этом на этапе погружения в атмосферу изменение вектора аэродинамической силы осуществляют путем выбора оптимального угла атаки, соответствующего достижению максимальной дальности полета аппарата.
6. Способ по п.4 или 5, отличающийся тем, что случайный разброс параметров траектории по высоте, дальности и курсу, вызванный разбросом начальных условий выведения, текущим отклонением полетных характеристик, сезонных, широтных, суточных вариаций параметров атмосферы и ветра, компенсируют аэродинамическими маневрами на крейсерском и завершающем участках в диапазоне располагаемого аэродинамического качества, связывая программу управления с конкретными условиями полета, для чего строят прогноз точек прицеливания для выхода в конечную зону.
| Итоги науки и техники | |||
| Приспособление к комнатным печам для постепенного сгорания топлива | 1925 |
|
SU1963A1 |
| ШУМЕЙКО И.И | |||
| Крылатые космические корабли | |||
| - М., 1966, с.64 и 65 | |||
| SU 1811129 A1, 10.10.1996 | |||
| СПОСОБ ПОЛЕТА РАКЕТОПЛАНА | 1999 |
|
RU2148537C1 |
| US 3276722 A, 04.10.1966 | |||
| US 3289974 A, 06.12.1966. | |||

