Область техники
Изобретение относится к авиации, к летательным аппаратам тяжелее воздуха, более конкретно к летательным аппаратам типа «утка», и может быть использовано в конструкции беспилотных летательных аппаратов для повышения их летно-технических характеристик.
Уровень техники
Известен беспилотный летательный аппарат, выполненный по «нормальной схеме» и содержащий крыло, фюзеляж для размещения оборудования, горизонтальное и вертикальное оперения и силовую установку с винтовым толкающим движителем, установленную в хвостовой части фюзеляжа, при этом винтовой толкающий движитель расположен позади оперения. Такое выполнение силовой установки усложняет конструкцию хвостовой части фюзеляжа, приводит к увеличению массы конструкции, что снижает полезную нагрузку (См. технико-экономическое описание беспилотного авиационного комплекса экологического мониторинга «ДАНЭМ» ОАО «ОКБ «Сокол», 2007 г.).
Известна принципиальная схема цельноповоротного кольцевого оперения Г.А.Амирьянца, состоящего из жесткого контура и управляемого кольца и снабженного приводами для управления по тангажу и курсу. В таком кольце мог бы быть установлен винт (См. В.Н.Семенов. Конструкция самолетов замкнутой и изменяемых схем. Издательский отдел ЦАГИ им. Проф. Жуковского Н.Е. 2005 г., стр.50).
Однако данная конструкция не обеспечивает использования энергии потока, создаваемого винтом, и не обеспечивает эффективного управления ввиду ограниченности длины управляемого кольца.
Известен дистанционно-пилотируемый летательный аппарат «Экварэ», представляющий собой моноплан с хвостовым оперением, расположенным в кольцевом канале, снабженном толкающим винтом (См. Зарубежные дистанционно-пилотируемые летательные аппараты (ДПЛА) в 1978-1979 г. (по материалам иностранной печати). ОНТИ ЦАГИ, №578, 1980 г., стр.28). Такая компоновка ввиду своей компактности используется на ДПЛА. Однако расположение оперения внутри кольцевого канала снижает тяговые характеристики силовой установки.
Известен самолет, содержащий крыло, фюзеляж, силовую установку с винтовым толкающим движителем, расположенным в хвостовой части фюзеляжа. При этом крыло выполнено стреловидным, а путевую устойчивость и управляемость обеспечивают вертикальные кили, установленные на концах крыла и снабженные рулями направления. Кроме того, винтовой движитель снабжен кольцевым цилиндрическим кожухом, имеющим небольшой продольный размер, равный, как следует из общего вида самолета ≈0,3-0,5 (См. с-т Free Flight Hornet S10. JANE'S All the world's aircraft 1986-87, стр.538-539). Такой кожух позволяет повысить эффективность винта на ≈5%, в частности, при работе на месте или при небольших скоростях. Однако на крейсерских режимах полета его влияние на тягу незначительно.
Схема позволяет получить высокое аэродинамическое качество. Однако кили на концах крыла имеют большую площадь для обеспечения как путевой устойчивости, так и путевой управляемости из-за малого их плеча относительно центра тяжести. Этот недостаток особенно остро ощущается на взлете и посадке, когда аэродинамические поверхности не эффективны из-за малой скорости полета. Кроме того, кили сами имеют значительную массу и, более того, увеличивают массу крыла, требуют значительных масс для системы управления. Поэтому такая схема самолета имеет резерв для совершенствования при выборе более совершенной конструкции системы путевой устойчивости и управляемости.
Сущность изобретения
Задачей изобретения является разработка такой конструкции беспилотного летательного аппарата, которая бы обеспечивала ему более высокое аэродинамическое качество, меньшую массу конструкции и более высокую транспортную эффективность.
Кроме того, должна быть обеспечена более высокая и надежная управляемость на всех режимах полета.
Поставленная задача достигается тем, что в беспилотном летательном аппарате, выполненном по схеме «утка» и содержащем крыло, фюзеляж, переднее горизонтальное оперение, силовую установку с винтовым толкающим движителем, расположенным в хвостовой части фюзеляжа, и систему управления, при этом крыло выполнено стреловидным, а винтовой движитель снабжен кольцевым кожухом, кольцевой кожух выполнен удлиненным, простирающимся назад от плоскости винтового движителя и с выхлопным поворотным соплом, снабженным вертикальным и горизонтальным приводами, осуществляющими отклонение поворотного сопла вокруг горизонтальной и вертикальной осей соответственно, а система управления связана с вертикальным и горизонтальным приводами поворотного сопла.
Кроме того, крыло может быть выполнено на своих концах с интерцепторами, выполняющими роль дополнительного средства поперечного управления аппаратом по углу крена.
Более того, ПГО может выполнено переставным (на земле) с заданным углом атаки для определяющего режима полета.
Такое выполнение летательного аппарата позволяет уменьшить его массу за счет отсутствия элеронов и проводки системы управления к ним, удлиненный кольцевой кожух силовой установки вместе со стреловидным крылом обеспечивает достаточную путевую устойчивость аппарата, устраняя необходимость использования вертикальных поверхностей и более высокую управляемость на всех режимах полета. Крыло, выполненное без щелей под элероны, имеет меньшее сопротивление и более высокие несущие свойства.
Перечень чертежей
Изобретение поясняется чертежами, на которых:
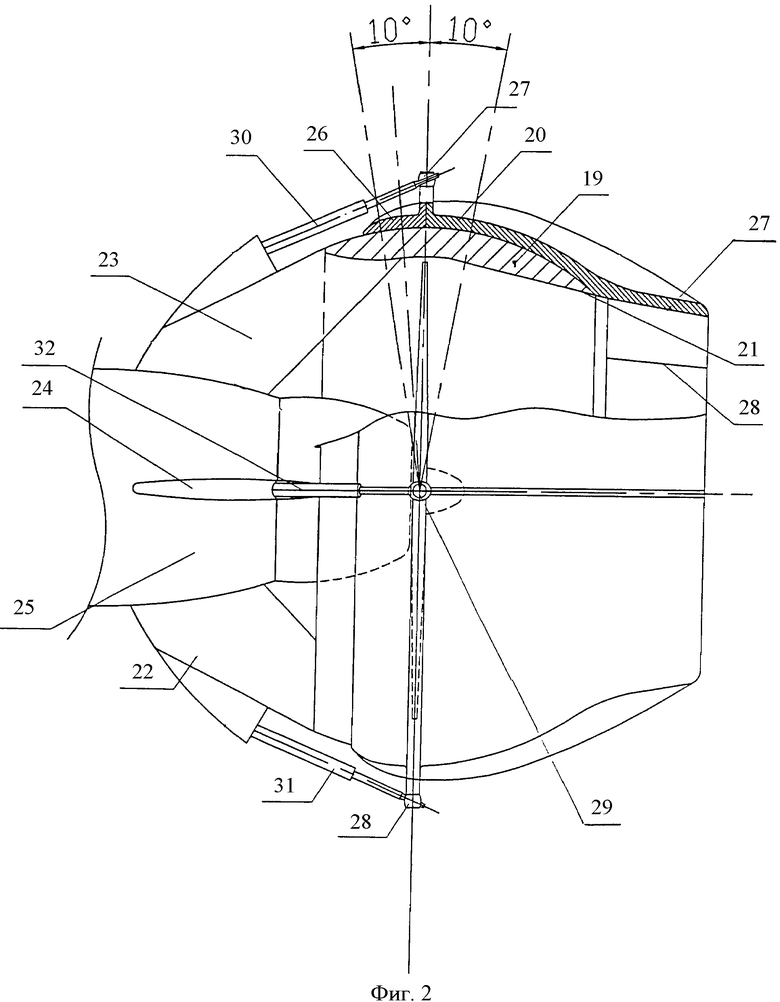
- Фиг.1 показывает общий вид БПЛА при виде в плане;
- Фиг.2 показывает хвостовую часть БПЛА с силовой установкой с частичным вырывом кольцевого кожуха.
Осуществление изобретения
Частный пример беспилотного летательного аппарата (БПЛА) в соответствии с изобретением реализуется следующим образом.
БПЛА выполнен по схеме «утка» и содержит (см. Фиг.1): верхнерасположенное крыло 1, фюзеляж 2, расположенное в носовой части фюзеляжа переднее горизонтальное оперение (ПГО) 3 и установленную в хвостовой части фюзеляжа силовую установку с 4 толкающим винтом. Аппарат содержит также систему управления (на черт. не показано), обеспечивающую управление траекторией полета и положением БПЛА в пространстве.
Крыло выполнено свободнонесущим, стреловидным и снабжено на своих концах цилиндрическими антивихревыми законцовками 5 и 6. Крыло содержит на своих концевых частях интерцепторы 7, 8. Интерцепторы выполнены с гидравлической системой управления интерцепторами, обеспечивающей их как синхронное, так и раздельное (дифференциальное) их отклонение, и могут быть использованы как дополнительное средство поперечного управления положением аппарата по углу крена и как средство управления положением аппарата по высоте траектории полета.
Переднее горизонтальное оперение выполнено шарнирно установленным на оси перпендикулярной плоскости симметрии аппарата и самоустанавливающимся на заданный угол атаки.
ПГО состоит из двух половинок: левой 9 и правой 10, закрепленных на валу 11, установленному в подшипниковых узлах, размещенных в носовой части фюзеляжа. Вал 11 связан с электрогидравлическим приводом (на черт. не показано), управляющим отклонением ПГО.
Электрогидравлический привод ПГО выполнен связанным с автопилотом системы управления БПЛА, снабжен задатчиком угла атаки ПГО и следящей системой, отслеживающей текущий угол атаки и выдающей сигнал управления в случае рассогласования с заданным углом атаки. Заданный угол атаки ПГО определяется требуемым режимом полета из условия балансировки аппарата и устанавливается программой управления полетом.
В простейшем варианте реализации изобретения ПГО может быть выполнено переставным (на земле) с заданным углом атаки для определяющего режима полета, например, крейсерского на заданной высоте. При этом половинки ПГО могут быть выполнены с переставными серворулями на своих задних кромках, а вал 11 выполнен свободно вращающимся в подшипниковых узлах и снабжен ограничителями поворота в пределах летных углов атаки ПГО (на черт. не показано). В этом случае заданный угол атаки определяется установкой серворулей на соответствующий угол отклонения.
Параметры ПГО и углы его отклонения выбраны таким образом, чтобы обеспечивалась балансировка аппарата на заданных режимах полета.
Силовая установка выполнена с двигателем и воздушным винтом, заключенным в кольцевой кожух 13, установленный на хвостовой части фюзеляжа впереди моторного отсека 15 с помощью вертикальных 17 и горизонтальных пилонов 18.
При этом кольцевой кожух 13 выполнен удлиненным, простирающимся назад от плоскости винта и с выхлопным поворотным соплом, снабженным вертикальным и горизонтальным приводами, осуществляющими отклонение поворотного сопла вокруг горизонтальной и вертикальной осей соответственно.
В качестве двигателя может быть использован двигатель внутреннего сгорания, роторный или электродвигатель. Кольцевой кожух 13 выполнен (См. Фиг.2) составным из неподвижного внутреннего кольца19 и сочлененного с ним подвижного наружного кожуха 20. Внутренняя поверхность 21 внутреннего кольца выполнена профилированной, образующей продольный канал с входным конфузором, срединной частью, охватывающей воздушный винт, и выходным конфузором. Наружная поверхность внутреннего кольца 19 выполнена в виде усеченной сферы, ограниченной плоскостями передней и задней кромок, само внутреннее кольцо закреплено с помощью пилонов 22, 23, 24 и нижнего пилона (на черт. не показано) на хвостовой части фюзеляжа 25. Наружный кожух 20 выполнен в передней своей части с внутренней сферической поверхностью, взаимодействующей со сферой внутреннего кольца, закреплен на сфере с помощью накидного кольца 26 и снабжен на своем конце кольцевым патрубком 27, образующим выхлопное сопло. Кольцевой патрубок 27 снабжен связанным с ним кольцом 28, несущим выпрямляющие направляющие лопатки, предназначенные для выпрямления потока, закрученного воздушным винтом. На своей наружной поверхности наружный кожух 20 несет сферические узлы 27, 28, 29, связанные с вертикальным и горизонтальным приводами, выполненными гидравлическими. При этом гидроцилиндры 30 и 31 образуют горизонтальный привод, а гидроцилиндр 32 вместе с расположенным симметрично ему нижним гидроцилиндром образуют вертикальный привод.
Вместо винта может быть использован и любой другой лопастной движитель, например винтовентилятор.
Аппарат снабжен пилотажно-навигационным комплексом, включающим автопилот и блок датчиков с вычислителем, для управления движением, положением на траектории, режимами двигателя. Блок датчиков включает все датчики первичной информации и формирует сигналы крена, тангажа, курса, истинной скорости, барометрической высоты и др.
Управление траекторией полета осуществляется в соответствии с введенной программой полета на основе вычисленных навигационных параметров.
Аппарат снабжен системой радиоуправления полетом, с помощью которой может корректироваться программа полета, и может производиться взлет и посадка «по-самолетному» с помощью оператора. Для этого аппарат может быть оборудован шасси, выполненным с носовым колесом и двумя основными колесами, установленными на фюзеляже.
Однако лучшие характеристики БПЛА достигаются при взлете его с помощью ускорителя со стартовой установки. При этом БПЛА снабжен парашютной системой, установленной в отсеке фюзеляжа, а посадка его может производиться десантированием с помощью парашютов в заданном районе.
В полете БПЛА его балансировка для данного режима полета обеспечивается ПГО. Балансировка аппарата на переходных режимах и сам переход обеспечиваются за счет отклонения поворотного сопла силовой установки в вертикальной плоскости с помощью вертикальных приводов.
После устранения управляющего воздействия поворотного сопла ПГО устанавливается на заданный угол атаки, восстанавливая прежнее положение аппарата на траектории.
При этом, ПГО не создает дестабилизирующего продольного момента, а продольная устойчивость обеспечивается с помощью горизонтальной площади удлиненного кожуха силовой установки, играющего роль стабилизатора.
Путевая управляемость БПЛА обеспечивается за счет отклонения поворотного сопла силовой установки в горизонтальной плоскости с помощью горизонтальных приводов. Возникающий при этом угол крена при необходимости может быть дополнительно изменен с помощью интерцепторов.
Путевая устойчивость БПЛА обеспечивается за счет стреловидных консолей крыла и площади удлиненного кожуха силовой установки в вертикальной плоскости, а необходимая степень поперечной устойчивости может быть обеспечена путем придания крылу соответствующего угла поперечного V крыла.
Такое выполнение БПЛА за счет того, что отсутствуют элероны, закрылки на крыле, и за счет наличия переднего горизонтального оперения позволяет значительно повысить его аэродинамическое качество. Более того, наличие кожуха винта, выполненного в соответствии с изобретением, позволяет максимально использовать мощность двигателя и получить удовлетворительные тяговые характеристики при минимальной энерговооруженности. Кроме того, при этом обеспечивается эффективное управление аппаратом на всех этапах полета. Все это позволяет значительно улучшить летно-технические характеристики, в частности дальность и продолжительность полета, и эффективность использования БПЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2015 |
|
RU2606216C1 |
| КОНВЕРТОПЛАН (ВАРИАНТЫ) | 2010 |
|
RU2446078C2 |
| БЕСПИЛОТНЫЙ КОМБИНИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2011 |
|
RU2485018C1 |
| БПЛА и способ управления БПЛА | 2024 |
|
RU2831546C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2005 |
|
RU2288140C1 |
| Многоцелевая сверхтяжелая транспортная технологическая авиационная платформа укороченного взлета и посадки | 2019 |
|
RU2714176C1 |
| БПЛА из унифицированных деталей и узлов и способ его изготовления | 2023 |
|
RU2812011C1 |
| Многоцелевой беспилотный летательный аппарат | 2021 |
|
RU2763896C1 |
| Беспилотный летательный аппарат | 2023 |
|
RU2818209C1 |
| ВЫСОКОСКОРОСТНОЙ БЕСПИЛОТНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2010 |
|
RU2464203C2 |
Изобретение относится к авиации, к летательным аппаратам тяжелее воздуха, более конкретно к летательным аппаратам типа «утка», и может быть использовано в конструкции беспилотных летательных аппаратов. Беспилотный летательный аппарат выполнен по схеме «утка» и содержит крыло, фюзеляж, переднее горизонтальное оперение, силовую установку с винтовым толкающим движителем, расположенным в хвостовой части фюзеляжа, и систему управления. Крыло выполнено стреловидным, а винтовой движитель снабжен кольцевым кожухом. Кольцевой кожух выполнен удлиненным, простирающимся назад от плоскости винтового движителя, и с выхлопным поворотным соплом, снабженным вертикальным и горизонтальным приводами, осуществляющими отклонение поворотного сопла вокруг горизонтальной и вертикальной осей. Переднее горизонтальное оперение выполнено шарнирно установленным на оси, направленной вдоль его размаха и перпендикулярной плоскости симметрии аппарата, и самоустанавливающимся на заданный угол атаки. Система управления связана с вертикальным и горизонтальным приводами поворотного сопла. Достигается повышение аэродинамического качества и уменьшение массы конструкции. 3 з.п. ф-лы, 2 ил.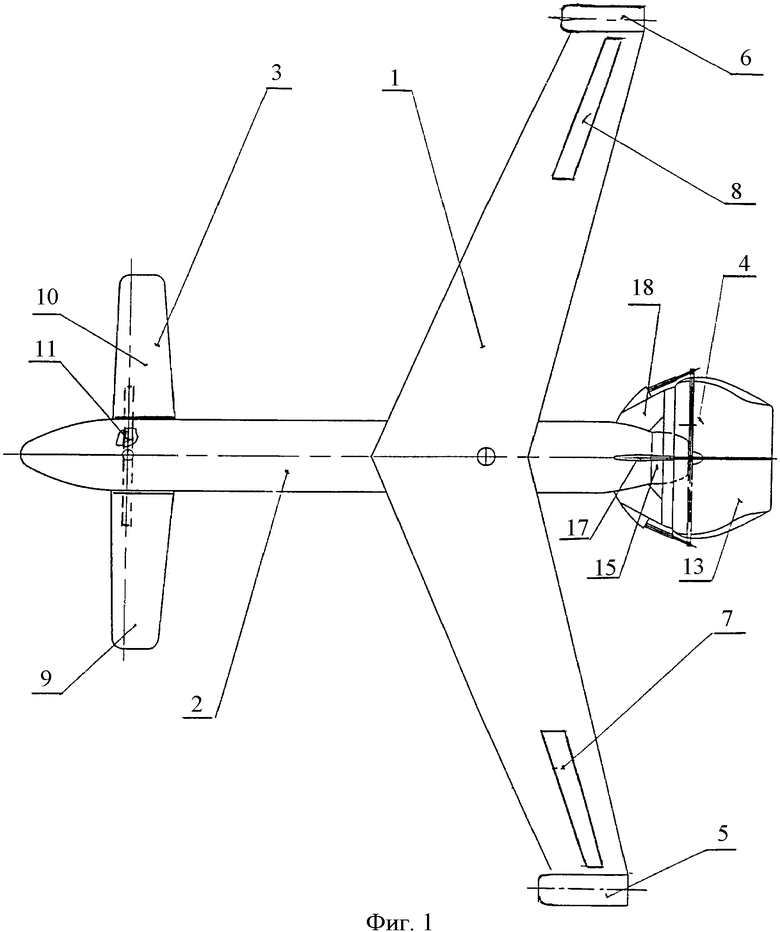
1. Беспилотный летательный аппарат, выполненный по схеме «утка» и содержащий крыло, фюзеляж, переднее горизонтальное оперение, силовую установку с винтовым толкающим движителем, расположенным в хвостовой части фюзеляжа, и систему управления, при этом крыло выполнено стреловидным, а винтовой движитель снабжен кольцевым кожухом, отличающийся тем, что кольцевой кожух выполнен удлиненным, простирающимся назад от плоскости винтового движителя, и с выхлопным поворотным соплом, снабженным вертикальным и горизонтальным приводами, осуществляющими отклонение поворотного сопла вокруг горизонтальной и вертикальной осей соответственно, переднее горизонтальное оперение выполнено шарнирно установленным на оси, направленной вдоль его размаха и перпендикулярной плоскости симметрии аппарата, и самоустанавливающимся на заданный угол атаки, а система управления связана с вертикальным и горизонтальным приводами поворотного сопла.
2. Беспилотный летательный аппарат по п.1, отличающийся тем, что кольцевой кожух выполнен составным из неподвижного внутреннего кольца и сочлененного с ним подвижного наружного кожуха, при этом внутренняя поверхность внутреннего кольца выполнена профилированной, образующей продольный канал с входным конфузором, срединной частью, охватывающей воздушный винт, и выходным конфузором, наружная поверхность внутреннего кольца выполнена в виде усеченной сферы, ограниченной плоскостями передней и задней кромок, само внутреннее кольцо закреплено с помощью пилонов на хвостовой части фюзеляжа, наружный кожух выполнен в передней своей части с внутренней сферической поверхностью, взаимодействующей со сферой внутреннего кольца, закреплен на сфере с помощью накидного кольца и снабжен на своем конце кольцевым патрубком, а на своей наружной поверхности наружный кожух несет сферические узлы, сочлененные с вертикальным и горизонтальным приводами.
3. Беспилотный летательный аппарат по п.1 или 2, отличающийся тем, что крыло выполнено на своих концах с интерцепторами, выполняющими роль дополнительного средства поперечного управления положением аппарата по углу крена.
4. Беспилотный летательный аппарат по п.1 или 2, отличающийся тем, что переднее горизонтальное оперение выполнено переставным с заданным углом атаки для определяющего режима полета.
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ПО СХЕМЕ "УТКА" С ФЛЮГИРУЮЩИМИ РУЛЯМИ С ПРИВОДОМ ЧЕРЕЗ ЗОНУ НЕЧУВСТВИТЕЛЬНОСТИ | 1993 |
|
RU2087381C1 |
| ИНТЕГРАЛЬНЫЙ И/ИЛИ МОДУЛЬНЫЙ ВЫСОКОСКОРОСТНОЙ САМОЛЕТ | 2002 |
|
RU2297371C2 |
| ТРАНЗИСТОРНЫЙ КОММУТАТОР | 1996 |
|
RU2125342C1 |
| US 2006102798 A1, 18.05.2006. | |||

