Изобретение относится к области авиакосмической техники, в частности, к транспортным космическим кораблям многократного применения.
Известен способ полета ракетоплана, включающий стыковку ракетоплана с самолетом-носителем, совместный старт, набор заданной высоты, полет в заданный район самолета-носителя и состыкованного с ним ракетоплана, отделение ракетоплана от самолета-носителя (Патент RU N 2000257 кл. B 64 G 1/14).
Недостатком известного способа является недостаточная точность ориентации ракетоплана, приводящая к разбросу баллистических параметров его движения, и высокая стоимость выполнения всех необходимых операций.
Техническим результатом использования изобретения является снижение стоимости полета и повышение точности ориентации ракетоплана за счет создания и управления кинетическими моментами средств, размещенных на ракетоплане.
Для этого предлагается способ полета ракетоплана, включающий стыковку ракетоплана с самолетом-носителем, совместный старт, набор заданной высоты, полет в заданный район самолета-носителя и состыкованного с ним ракетоплана, отделение ракетоплана от самолета-носителя, при этом перед отделением ракетоплана ротору, размещенному на ракетоплане, в качестве которого может служить твердотопливный двигатель или, по крайней мере, одна из частей корпуса ракетоплана, сообщают вращение относительно главной оси симметрии и сохраняют его на восходящей и нисходящей ветвях траектории, включение двигателя ракетоплана производят через заданное время после отделения ракетоплана от самолета-носителя, а при аэродинамическом планировании, предпосадочном маневре и посадке ракетоплана прекращают вращение ротора ракетоплана и осуществляют переход на ручное и/или автоматическое управление параметрами движения.
Кроме того, ракетоплану через заданное время после отделения от самолета-носителя сообщают постоянное или знакопеременное вращение относительно главной оси симметрии ракетоплана, сохраняют его на восходящей и нисходящей ветвях траектории и прекращают вращение одновременно с прекращением вращения ротора.
Кроме того, корпусу ракетоплана через заданное время после отделения от самолета-носителя сообщают постоянное или знакопеременное вращение относительно главной оси симметрии ракетоплана, сохраняют его на восходящей и нисходящей ветвях траектории и прекращают вращение одновременно с прекращением вращения ротора.
Кроме того, по крайней мере, одной из частей корпуса ракетоплана через заданное время после отделения от самолета-носителя сообщают постоянное или знакопеременное вращение относительно главной оси симметрии ракетоплана, сохраняют его на восходящей и нисходящей ветвях траектории и прекращают вращение одновременно с прекращением вращения ротора.
Кроме того, ракетоплан состыковывают с самолетом-носителем, размещая его над или под корпусом самолета-носителя.
На чертеже схематично представлены фазы движения ракетоплана при его полете.
Полет ракетоплана включает в себя следующие фазы: I - фаза совместного полета ракетоплана с самолетом-носителем; II - фаза отделения ракетоплана от самолета-носителя и активный участок полета; III - фаза баллистического полета; IV - фаза аэродинамического планирования и посадки.
Способ полета ракетоплана осуществляется следующим образом.
Полет начинается с совместного старта самолета-носителя и состыкованного с ним ракетоплана, размещенного над или под корпусом самолета-носителя. При достижении заданной высоты и осуществлении полета в заданный район ротору, размещенному на ракетоплане, сообщают вращение относительно его главной оси симметрии и сохраняют его на восходящей и нисходящей ветвях траектории ракетоплана. В результате этого формируется кинетический момент, что позволяет осуществить управляемую одноосную ориентацию (по вектору кинетического момента) на участках разгона и пассивного баллистического полета. На орбитальном участке ракетоплан может вращаться, стабилизироваться (или покачиваться) относительно вектора кинетического момента. После отделения ракетоплана от самолета-носителя через заданный интервал времени, определяемый баллистическими параметрами траектории, включается твердотопливный двигатель ракетоплана. Также через заданное время после отделения от самолета-носителя сообщается постоянное или знакопеременное вращение относительно главной оси симметрии ракетоплану, или его корпусу, или, по крайней мере, одной из частей корпуса ракетоплана. Моменты сообщения вращения ракетоплану (или его корпусу, или, по крайней мере, одной из его частей) относительно главной оси симметрии ракетоплана и включения двигателя ракетоплана могут как совпадать, так и быть смещенными во времени.
После отделения ракетоплана самолет-носитель возвращается на аэродром, а ракетоплан осуществляет движение по восходящей ветви траектории. Вращения ротора ракетоплана и ракетоплана (или его корпуса, или, по крайней мере, одной из его частей) поддерживаются на восходящей и нисходящей ветвях траектории. При аэродинамическом планировании, предпосадочном маневре и посадке ракетоплана прекращают вращения ротора ракетоплана, ракетоплана (или его корпуса, или, по крайней мере, одной из его частей) и осуществляют переход на ручное и/или автоматическое управление параметрами движения. В качестве ротора может быть использован твердотопливный двигатель ракетоплана или, по крайней мере, одна из частей корпуса ракетоплана. 1
Управление режимом ориентации по вектору кинетического момента позволяет обеспечить постоянное значение угла тангажа θ на активном участке разгона ракетоплана, а на участке входа в атмосферу обеспечить близкие к оптимальным углы атаки, способствующие интенсивному торможению. Кроме этого, уменьшается разброс координат прогнозируемой точки посадки ракетоплана и обеспечивается снижение стоимости проведения полета. Также способ полета ракетоплана обеспечивает высокий уровень экологической чистоты.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОДУЛЬНЫЕ САМОЛЕТЫ-ВЕРТОЛЕТЫ ДЛЯ КОРАБЕЛЬНЫХ АВИАЦИОННО-РАКЕТНЫХ СИСТЕМ | 2020 |
|
RU2750586C1 |
| САМОРАСКРЫВАЮЩИЙСЯ ПАРАШЮТ С ПНЕВМАТИЧЕСКИМИ СТРОПАМИ | 2023 |
|
RU2813173C1 |
| СНИЖЕНИЕ ПОВРЕЖДЕНИЙ САМОЛЕТОВ ОТ СТОЛКНОВЕНИЯ С ПТИЦАМИ | 2012 |
|
RU2598110C2 |
| СИСТЕМЫ И СПОСОБЫ МНОГОСТОРОННЕГО АНАЛИЗА | 2012 |
|
RU2627927C2 |
| ПРОЦЕССОР ОБРАЗОВ КУЩЕНКО В.А. | 2008 |
|
RU2399093C2 |
| СИСТЕМЫ И СПОСОБЫ, ИСПОЛЬЗУЕМЫЕ ПРИ СВАРКЕ СЕГМЕНТОВ ТРУБЫ В ТРУБОПРОВОДЕ | 2015 |
|
RU2708721C2 |
| СИСТЕМЫ И СПОСОБЫ, ИСПОЛЬЗУЕМЫЕ ПРИ СВАРКЕ СЕГМЕНТОВ ТРУБЫ В ТРУБОПРОВОДЕ | 2019 |
|
RU2775615C2 |
Изобретение относится к авиакосмической технике и, в частности, к транспортным космическим кораблям многократного применения. Согласно изобретению ракетоплан состыковывают с самолетом-носителем, размещая его под (над) корпусом. Перед отделением ракетоплана от самолета-носителя размещенному на ракетоплане ротору сообщают вращение. Через некоторое время после отделения включают двигатель ракетоплана и сообщают вращение ракетоплану. При аэродинамическом планировании и посадке ракетоплана прекращают вращение ротора и осуществляют управление параметрами движения ракетоплана. Изобретение направлено на снижение стоимости полета и повышение точности ориентации ракетоплана за счет управления кинетическими моментами средств, размещенных на ракетоплане. 6 з.п.ф-лы, 1 ил.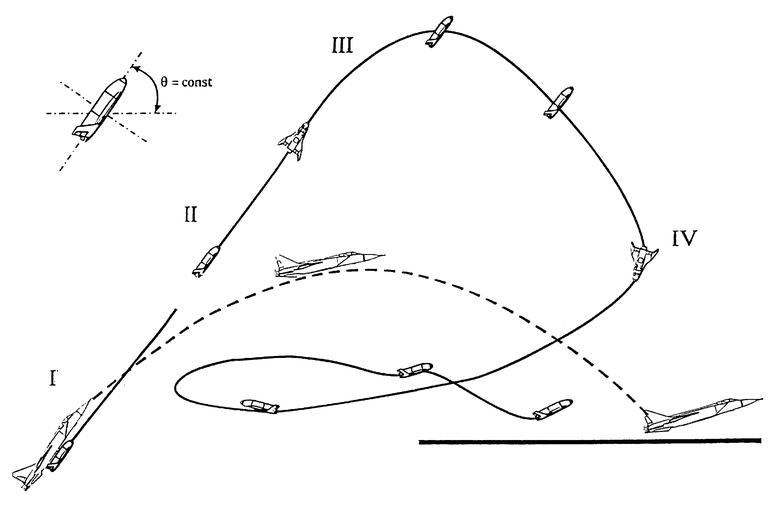
| RU 2000257 C1, 07.09.1993 | |||
| Ракетная и космическая техника | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Петров В.П | |||
| и др | |||
| Управление ракетами | |||
| - М.: Воениздат, 1963, с.51-53, 85-87 | |||
| Астронавтика и ракетодинамика | |||
| Экспресс-информация | |||
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |
| Способ подготовки образцов субхондральной костной ткани человека для изучения ее механических характеристик при одноосном сжатии | 2018 |
|
RU2713593C2 |

