Предлагаемое изобретение относится к оборонной технике и может использоваться в зенитных ракетных комплексах (ЗРК) для защиты военных и промышленных объектов от низколетящих самолетов, вертолетов, ракет и других малоразмерных средств воздушного нападения в пределах ближней тактической зоны до 30 км.
В настоящее время в нашей стране и за рубежом придается большое значение разработке высокоточных систем наведения (СН) зенитных управляемых ракет (ЗУР), обеспечивающих эффективное поражение нескольких малоразмерных воздушных целей в одном залпе.
Известна система наведения зенитного комплекса «Акаш» ближнего действия до 27 км, способная наводить ракеты по нескольким целям. В этой СН реализовано радиокомандное наведение ракет с помощью РЛС и радиолокационной головки наведения снаряда (ГНС) (журнал «Зарубежное военное обозрение», №9, 2001, стр.38-40).
Основные недостатки указанной радиолокационной командной системы наведения следующие:
- низкая вероятность обнаружения низколетящих малоразмерных целей, использующих технологии «стеле», делающие их слабоконтрастными в радиолокационном отношении;
- большое время реакции (15 с) из-за низкого разрешения (информативности) и обработки радарной информации, что снижает вероятность поражения маскированных целей в ближней зоне обстрела;
- низкая помехоустойчивость в условиях организованных противником помех;
- возможно поражение ЗРК самонаводящимися противолокационными ракетами.
Перечисленных недостатков не имеет система наведения зенитных управляемых ракет ближнего действия, которая в своем составе содержит командный пункт и ракеты для залпового пуска.
На командном пункте системы имеется: радиолокационная станция обнаружения целей, вычислитель, аппаратура навигации, видеомонитор, пульт управления, приводы наведения, блок синхронизации и кодирования, автомат сопровождения целей по данным оптоэлектронной системы, подъемно-поворотная платформа, на которой установлены радиолокационная станция сопровождения, содержащая фазированную антенную решетку (ФАР), блок управления лучами, каналы передачи команд управления, каналы пеленгации целей и пеленгации ракет, а также - оптоэлектронная система (ОЭС), имеющая в своем составе пеленгатор ракет и тепловизионный прицел.
На каждой ракете содержатся радиоприемник, радиоответчик, дешифратор команд управления, аппаратура управления, выход которой соединен с входом рулевого привода.
Реализация данной системы наведения ЗУР на основе объединения радиолокационного и оптического методов пеленгации ракет позволили повысить боевую эффективность ЗРК ближнего действия в различных погодных условиях и при наличии организованных противником помех (патент РФ №2324139, МПК F41H 11/02, 2006).
Система по патенту РФ №2324139 по технической сущности и достигаемому эффекту является наиболее близкой к заявляемой и принята заявителем и авторами за прототип.
Недостатком рассматриваемой системы наведения ЗУР является низкая пропускная способность при работе в радиолокационном режиме, заключающаяся в ограниченном количестве ракет, эффективно управляемых в одном залповом пуске, в результате чего снижается количество и эффективность поражения целей одним залповым пуском ракет.
Перед авторами стояла задача создания системы наведения ЗУР с повышением эффективности за счет увеличения пропускной способности при работе в радиолокационном режиме.
Задача решена за счет того, что в систему наведения зенитных управляемых ракет ближнего действия, содержащую командный пункт с подъемно-поворотной платформой, ракеты для залпового пуска и имеющую на командном пункте радиолокационную станцию обнаружения целей, подключенную к вычислителю, один из входов которого подключен к каналам пеленгации ракет, а выход соединен с блоком синхронизации и кодирования, на подъемно-поворотной платформе командного пункта расположена радиолокационная станция сопровождения с фазированной антенной решеткой, каналами передачи команд управления, каналами пеленгации ракет, причем каждая ракета для залпового пуска снабжена радиоприемником, радиоответчиком и дешифратором команд управления, дополнительно введены блок определения однозначной дальности ракет и блок коммутации команд управления, при этом блок определения однозначной дальности ракет включен между входом вычислителя для подключения к каналам пеленгации ракет и выходом каналов пеленгации ракет, а блок коммутации команд управления выполнен в виде коммутатора сигналов с двумя сигнальными и одним управляющим входами, линии задержки, временного селектора с двумя входами и таймера, причем первый вход временного селектора и первый сигнальный вход коммутатора сигналов подключены непосредственно к выходу блока синхронизации и кодирования, с которым через линию задержки соединен второй сигнальный вход коммутатора сигналов, управляющий вход которого через таймер подключен к выходу временного селектора, второй вход которого соединен с выходом каналов пеленгации ракет, а выход коммутатора сигналов подключен ко входу каналов передачи команд управления.
Заявляемая система наведения зенитных управляемых ракет ближнего действия обладает совокупностью существенных признаков, не известных из уровня техники для изделий подобного назначения, что позволяет сделать вывод о соответствии критерию «новизна» для изобретения.
Заявляемая система наведения, по мнению заявителя и авторов, соответствует критерию «изобретательский уровень», т.к. для специалистов он явным образом не следует из уровня техники, т.е. не известна из доступных источников научной, технической и патентной информации на дату подачи заявки.
Сущность изобретения поясняется с помощью графических материалов,
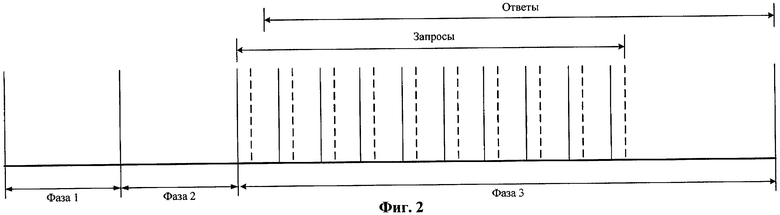
где на фигуре 1 представлена структурная схема системы наведения ракет;
на фигуре 2 - циклограмма одноразового обслуживания ракеты.
Система наведения содержит: командный пункт 1, аппаратуру 2 навигации, вычислитель 3, видеомонитор 4, РЛС 5 обнаружения целей, пульт 6 управления, блок 7 синхронизации и кодирования, приводы 8 наведения, автомат 9 сопровождения целей, подъемно-поворотную платформу 10, РЛС 11 сопровождения, каналы 12 пеленгации целей, каналы 13 пеленгации ракет, каналы 14 передачи команд управления, блок 15 управления лучами, ФАР 16, ОЭС 17, пеленгатор ракет 18, теплотелевизионный прицел 19, ракету 20, радиоответчик 21, радиоприемник 22, дешифратор 23 команд управления, лазерный ответчик 24, аппаратуру 25 управления, рулевой привод 26, блок 27 определения однозначной дальности, блок 28 коммутации команд управления, таймер 29, коммутатор 30 сигналов, временной селектор 31, линию 32 задержки.
На фигуре 2 обозначены:
фаза 1 - передача на ракету сигналов для настройки АРУ ее радиоприемника;
фаза 2 - передача данных управления ракетой;
фаза 3 - передача на ракету запросных сигналов и определение координат.
Решение поставленной задачи с достижением технического результата обусловлено следующим.
После залпа взаимодействие командного пункта с выпущенными в залпе ракетами ведется циклами, включающими последовательное одноразовое обслуживание каждой ракеты залпа с учетом ее приоритета по решаемой боевой задаче.
Как видно из фигуры 2, одноразовое обслуживание ракеты включает три фазы. Первые две фазы (фаза 1 и 2) используются для согласования радиоприемника ракеты с ожидаемым уровнем сигнала и для передачи данных управления ракетой по высоте и курсу. В фазе 3 осуществляется взаимодействие с ракетой (с использованием запросных и ответных сигналов) по определению ее дальности и угловых координат.
Как показывает анализ циклограмм одноразового обслуживания в известных системах наведения ЗУР ближнего действия, суммарное время фаз 1 и 2 не превышает 252 мкс.
Длительность фазы 3 в основном определяется максимальным удалением поражаемой цели от командного пункта (обычно совмещенного с пусковой установкой ракет), необходимым (для обеспечения требуемого отношения сигнал/шум) количеством циклов «запрос - ответ», а также необходимой задержкой перетрансляции Тптр запросного сигнала в сигнал радиоответчика ракеты.
В известных СН ЗУР с активным ответом задержка перетрансляции запросного сигнала в ответный не превышает Тптр=21 мкс.
Для обеспечения требуемого накопления сигнала необходимо провести не менее 10 циклов «запрос - ответ». Время одного такого цикла зависит от длительности периода повторения Тпз запросных сигналов, при котором обеспечивается однозначное определение дальности действия СН, которая определяется максимальной Дмакс дальностью поражаемой цели. При дальности действия рассматриваемых СН ЗУР Дмакс=30 км, однозначное определение дальности ЗУР может быть обеспечено при Тпз≥6,67×Дмакс=202 мкс. С учетом требуемого количества накапливаемых ответных импульсов длительность цикла «запрос - ответ» должна быть не менее 2020 мкс, а общее время фазы 3 - не менее 2041 мкс. При этом общее время одноразового обслуживания ракеты может достигать 2293 мкс.
При принятых в ЗРК частотах обслуживания командно управляемых ракет и целей и поражении целей на дальности 30 км (при полученном времени одноразового обслуживания ракет) пропускная способность СН ЗУР не превысит 3÷4-х ракет в одном залпе.
Повышение пропускной способности в предлагаемой системы обеспечивается за счет сокращения длительности фазы 3.
Как указано выше, длительность этой фазы определяется задержкой перетрансляции запросного сигнала в ответный и длительностью цикла «запрос - ответ».
Первую из указанных составляющих изменять нежелательно. Поэтому повышение пропускной способности системы наведения ЗУР предлагается увеличить за счет сокращения цикла «запрос - ответ», а конкретнее - за счет уменьшения периода повторения запросных сигналов.
Для рассматриваемых СП ЗУР минимально возможный период повторения запросных сигналов определяется видом этих сигналов, которые обычно представляются двумя следующими друг за другом импульсами, в расстоянии между которыми кодируется адрес конкретной ракеты. Учитывая максимально возможный временной разнос между указанными адресными импульсами запросного сигнала, а также то, что в запросном сигнале в ряде случаев передают коды особых команд в виде импульсов, «1» и «0» в которых кодируется их удалением от первого импульса в запросной паре импульсов, минимально возможный период повторения запросных сигналов Тпз должен быть не менее 35 мкс.
Принимаем Тпз=35 мкс. Тогда общая длительность Тф3 фазы 3 будет равна
Тф3=Тпз(n-1)+6,67×Дмакс+Тптр=35×9+6,67×30+21=536 мкс.
При этом общее время одноразового обслуживания ракеты будет не более
Тобсл=Тф1+Тф2+Тф3=51+201+536=788 мкс.
Следовательно, в предлагаемой системе наведения ЗУР время одноразового обслуживания ракет одного залпа может быть уменьшено с 2293 мкс до 788 мкс, т.е. в 2,9 раза.
Это значит, что в предлагаемой системе для поражения целей может быть использовано не менее 8 ЗУР одного залпа (вместо 3-4 ЗУР в известных системах).
Однако в предлагаемой системе возникает неоднозначность в определении дальности ЗУР. Такую неоднозначность предлагается устранить за счет использования априорной информации об ожидаемом удалении каждой ЗУР от пусковой установки (ожидаемой дальности Дож ЗУР).
Ожидаемая дальность Дож ЗУР может быть определена на командном пункте системы по формуле:

где Днач - дальность ракеты от момента начала радиообмена с ней;
Vp - расчетная скорость ракеты;
t - текущее время полета ракеты от момента ее пуска.
На командном пункте по каждому ответному сигналу определяют текущую (не однозначную) дальность снаряда Днеодн.
Вычислив ожидаемую и измерив неоднозначную текущую дальности снаряда, однозначную дальность Додн ракеты можно определить так:

где n=Дож/До - целая часть этого отношения;
Дож - определяется по формуле (1);
До=сТпнеодн/2 - максимальная дальность, определяемая периодом повторения Тпнеодн запросных сигналов;
Днеодн - измеренная текущая неоднозначная дальность ракеты.
При реализации предлагаемой системы из-за высокой частоты повторения запросных сигналов (малого Тпнеодн) возможно на командном пункте совпадение во времени ответных и запросных сигналов, что может привести к сбою информационного обмена с ракетой. Для устранения такой ситуации в состав системы вводится коммутатор сигналов управления. В этом коммутаторе определяется момент совпадения запросного и ответного сигналов, и при наличии такого совпадения последующие излучения запросных сигналов задерживаются на некоторое время (например, на 2 мкс) относительно предыдущего момента излучения этих сигналов. Такая задержка выдерживается до тех пор, пока в процессе полета ракета не уйдет с дальности, на которой произошло указанное совпадение запросного и ответного сигналов. После этого запросные сигналы излучаются без задержки.
Предлагаемая система наведения ЗУР может работать как в системе, объединяющей радиолокационный и оптоэлектронных режимы пеленгации и наведения ракет, так и в системе, в которой реализован только радиолокационный режим. Поскольку предлагаемое изобретение касается только радиолокационного режима работы системы наведения ЗУР, представляется целесообразным рассмотреть только этот режим для системы, представленной на фигуре 1.
Работа системы осуществляется следующим образом.
Поиск и обнаружение воздушных целей осуществляет РЛС 5 обнаружения целей. Измеренные этой РЛС координаты целей (дальность, азимут, угол места) поступают в вычислитель 3, где вырабатываются и выводятся на видеомонитор 4 данные о целях и порядке их обстрела. В вычислитель 3 также поступает информация о координатах неподвижного или движущегося командного пункта с аппаратуры 2 навигации.
При подлете целей к определенному рубежу с вычислителя 3 подаются команды на приводы 8 наведения подъемно-поворотной платформы 10, что обеспечивает разворот РЛС 11 сопровождения по азимуту и углу места в направлении приоритетных целей. Одновременно в вычислителе 3, на основании данных целеуказания с РЛС 5 обнаружения целей и аппаратуры 2 навигации, осуществляется привязка координат каждой цели к системе координат командного пункта 1, распределение ракет залпа по целям и вырабатываются команды в блок 15 управления лучами. В соответствии с этими командами лучи, сформированные ФАР 16, направляются на выбранные цели их для захвата и автосопровождения каналами 12 пеленгации целей.
Управление ракетами осуществляется относительно оси лучей, формируемых ФАР 16 через блок 15 управления лучами. Координаты ракет относительно оси лучей определяются каналами 13 пеленгации ракет по сигналам, поступающим с радиоответчика 21.
Так как в предлагаемой системе частота следования запросных сигналов высокая, то, как уже отмечалось, имеет место неоднозначность определения координаты дальности ракеты. Устранить такую неоднозначность можно, используя предложенное ранее решение с применением уравнений (1) и (2). Решение этой задачи для каждой ракеты проводится в блоке 27 определения однозначной дальности. Координаты ракет относительно оси лучей определяются каналами 13 пеленгации ракет по сигналам, поступающим с радиоответчиков 21, и через блок 27 определения однозначной дальности передаются в вычислитель 3. В этом вычислителе вырабатываются команды по азимуту и углу места, пропорциональные отклонениям ракет от лучей. Команды управления с установленной в системе высокой частотой следования передаются с вычислителя 3 в блок 7 синхронизации и кодирования, где кодируются в соответствии с реализуемой системой кодирования и через блок 28 коммутации команд управления поступают в каналы 14 передачи команд управления. Как уже отмечалось, в блоке 28 коммутации команд управления обеспечивается защита от сбоя информационного обмена с ракетой, которая возможна из-за совпадения запросных и ответных сигналов. При принятом периоде повторения запросных сигналов Тпз и максимально возможном удалении ракеты во время решения боевой задачи (Дmax=30 км) такое совпадение может происходить до 5 раз. Запросные сигналы передаются в начале каждого периода Тпз их повторения, т.е. отрезки дальности, определяемые их длительностью, располагаются в начале участков неоднозначной дальности. Ответный сигнал перемещается на всей дальности полета ракеты, повторяясь в различных местах участков неоднозначной дальности, в том числе и в месте, определяемом положением запросных сигналов. Определить такое совпадение можно, например, решив равенство

где Додн и Д0 - соответственно однозначная дальность ракеты и дальность, определяемая периодом повторения запросных сигналов.
Однако такое решение не оптимально. Дело в том, что запросный и ответный сигналы для каждой ракеты представляют собой, как уже отмечалось, пару импульсов, расстояние между которыми определяется адресным кодом ракеты. Уравнение (3) не позволяет определить, для какой конкретно ракеты произошло совпадение запросных и ответных сигналов. Поэтому в предлагаемом изобретении в блоке коммутации команд управления 28 имеется временной селектор 31, на выходе которого появится сигнал только при условии, что с запросным сигналом совпал во времени ответный сигнал только данной конкретной ракеты. Такое решение повышает помехозащищенность командного канала радиоуправления и обеспечивает его избирательность по отношению к сигналам других ракет.
Сигнал с выхода временного селектора 31 через таймер 29 управляет коммутатором 30 сигналов. При этом, если запросные и ответные сигналы не совпали по времени, временной селектор 31 не включает таймер 29, в результате чего запросные сигналы, сформированные блоком синхронизации и кодирования 7, поступают через коммутатор 30 сигналов в каналы 14 передачи команд без задержки. При совпадении запросных и ответных сигналов временной селектор 31 включает таймер 29. Под воздействием сигнала этого таймера коммутатор 30 сигналов передает в каналы 14 передачи команд управления запросные сигналы с блока 7 синхронизации и кодирования, задержанные линией 32 задержки. В результате нарушается имеющее место совпадение запросных и ответных сигналов. Формируемое таймером 29 время Тзад, в течение которого запросные сигналы поступают через линию 32 задержки, выбирается из условия
Тзад=сТлз/2Vpmax,
где с=300000 км/с - скорость света;
Тлз - длительность задержки сигналов в линии задержки;
Vpmax - максимальная скорость ракеты в районе цели.
Задержка сигналов Тлз в линии 32 задержки выбирается из условия
Тлз=(3-4)τизапр,
где τизапр - длительность запросного импульса.
Распределение ракет в залпе проводится блоком синхронизации и кодирования 7, осуществляющим общую синхронизацию каналов пеленгации ракет и каналов передачи команд управления.
В остальном алгоритм работы предлагаемой системы не отличается от порядка управления стрельбой ЗУР, реализованного в прототипе.
В момент пуска 1-й ракеты блок 7 синхронизации и кодирования по сигналу вычислителя 3 через блок 28 коммутации команд управления передает в дешифратор 23 информацию о записи адреса 1-й ракеты. Одновременно с этим блок 15 управления лучами формирует луч ФАР 16, направленный в поле встреливания ракеты. На основании данных целеуказания с каналов 12 пеленгации целей вычислитель 3 формирует команды управления лучом таким образом, чтобы при пуске ракеты формировался широкий луч, обеспечивающий захват ракеты и ввод ее в узкий луч. После ввода ракеты в узкий луч положение его в пространстве формируется по азимуту и углу места, совпадающим с положением в пространстве выбранной цели.
Канал 14 передачи команд управления посылает через ФАР 16 сигналы запроса радиоответчика 21, после их обработки в блоке 28 коммутации команд управления. На ракете радиоприемник 22 обеспечивает прием закодированной информации, передает ее в дешифратор 23, литерная команда с которого запускает радиоответчик 21. Сигналы радиоответчика через ФАР 16 поступают в каналы 13 пеленгации ракет, где определяются линейные отклонения ракеты от оси луча, направленного на выбранную цель. Сигналы радиоответчика поступают также в блок 27 определения однозначной дальности. С этого блока сигналы радиоответчика совместно с данными об отклонении ракеты от луча и вычисленной однозначной дальностью поступают в вычислитель 3, где вырабатываются команды управления. Полученные команды управления поступают в блок 7 синхронизации и кодирования, с выхода которого они через блок 28 коммутации команд управления поступают в каналы 14 передачи команд управления, а затем через ФАР 16 излучаются в направлении ракеты. Принятые радиоприемником 22 команды декодируются в дешифраторе 23 и поступают в аппаратуру 25 управления для управления рулевым приводом 26. В результате обеспечивается движение ракеты по оси луча.
Аналогично производят наведение других ракет в радиолокационном режиме работы СП.
Следует отметить, что все функции, выполняемые блоком 27 определения однозначной дальности, могут быть реализованы программно в вычислителе 3.
Заявляемое техническое решение было разработано в связи с выполнением НИР и рекомендовано для последующей реализации в рамках ОКР с дальнейшим использованием в зенитно-ракетном комплексе для нужд российского и иностранного заказчика, что позволяет сделать вывод о возможности применения заявляемой системы наведения и, следовательно, о соответствии критерию «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА НАВЕДЕНИЯ ЗЕНИТНЫХ УПРАВЛЯЕМЫХ РАКЕТ БЛИЖНЕГО ДЕЙСТВИЯ | 2006 |
|
RU2324139C1 |
| СИСТЕМА НАВЕДЕНИЯ ВЫСОКОТОЧНОГО ОРУЖИЯ ДАЛЬНЕЙ ЗОНЫ | 2003 |
|
RU2284444C2 |
| СПОСОБ НАВЕДЕНИЯ МНОГОЦЕЛЕВОГО ВЫСОКОТОЧНОГО ОРУЖИЯ ДАЛЬНЕЙ ЗОНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2399854C1 |
| СПОСОБ ВЫВОДА РАКЕТЫ В ЗОНУ ЗАХВАТА ЦЕЛИ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2013 |
|
RU2542691C1 |
| СПОСОБ НАВЕДЕНИЯ РАКЕТЫ, УПРАВЛЯЕМОЙ ЛУЧОМ РАДИОЛОКАЦИОННОЙ СТАНЦИИ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2460963C2 |
| СИСТЕМА НАВЕДЕНИЯ ВЫСОКОТОЧНОГО ОРУЖИЯ | 2015 |
|
RU2596173C1 |
| СПОСОБ ВЫВОДА ДАЛЬНОБОЙНОЙ РАКЕТЫ В ЗОНУ ЗАХВАТА ЦЕЛИ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И СИСТЕМА НАВЕДЕНИЯ ДАЛЬНОБОЙНОЙ РАКЕТЫ | 2015 |
|
RU2583347C1 |
| СПОСОБ НАВЕДЕНИЯ РАКЕТЫ, УПРАВЛЯЕМОЙ ЛУЧОМ РАДИОЛОКАЦИОННОЙ СТАНЦИИ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2473867C1 |
| ЗЕНИТНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС | 2006 |
|
RU2321818C1 |
| Способ управления зенитными управляемыми ракетами | 2021 |
|
RU2783106C1 |
Изобретение относится к оборонной технике и может быть использовано в зенитных ракетных комплексах (ЗРК) для защиты военных и промышленных объектов от низколетящих самолетов, вертолетов, ракет и других малоразмерных средств воздушного нападения в пределах ближней тактической зоны до 30 км. Система содержит командный пункт с подъемно-поворотной платформой, ракеты для залпового пуска и имеет на командном пункте радиолокационную станцию обнаружения целей. Радиолокационная станция подключена к вычислителю, один из входов которого подключен к каналам пеленгации ракет, а выход соединен с блоком синхронизации и кодирования. На подъемно-поворотной платформе командного пункта расположена радиолокационная станция сопровождения с фазированной антенной решеткой. Каждая ракета для залпового пуска снабжена радиоприемником, радиоответчиком и дешифратором команд управления. В состав командного пункта введены блок определения однозначной дальности ракет и блок коммутации команд управления. Технический результат заключается в повышении эффективности работы системы наведения в радиолокационном режиме. 2 ил.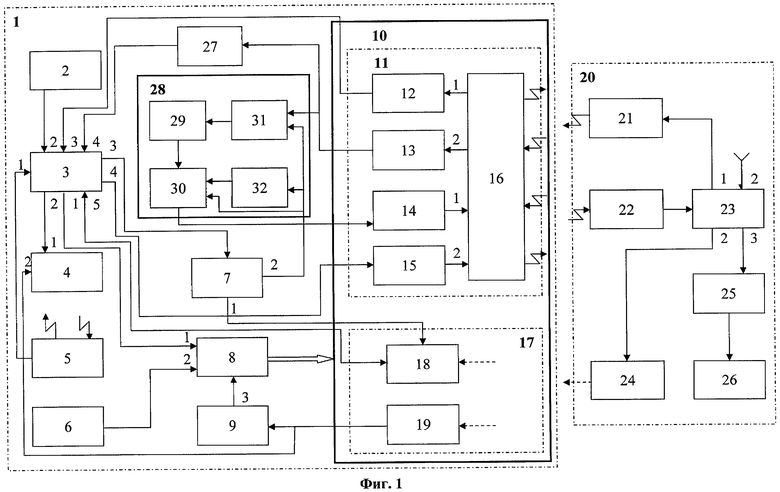
Система наведения зенитных управляемых ракет ближнего действия, содержащая командный пункт с подъемно-поворотной платформой, ракеты для залпового пуска, и имеющая на командном пункте радиолокационную станцию обнаружения целей, подключенную к вычислителю, один из входов которого подключен к каналам пеленгации ракет, а выход соединен с блоком синхронизации и кодирования, на подъемно-поворотной платформе командного пункта расположена радиолокационная станция сопровождения с фазированной антенной решеткой, каналами передачи команд управления, каналами пеленгации ракет, причем каждая ракета для залпового пуска снабжена радиоприемником, радиоответчиком и дешифратором команд управления, отличающаяся тем, что в состав командного пункта введены блок определения однозначной дальности ракет и блок коммутации команд управления, при этом блок определения однозначной дальности ракет включен между входом вычислителя для подключения к каналам пеленгации ракет и выходом каналов пеленгации ракет, а блок коммутации команд управления выполнен в виде коммутатора сигналов с двумя сигнальными и одним управляющим входами, линии задержки, временного селектора с двумя входами и таймера, причем первый вход временного селектора и первый сигнальный вход коммутатора сигналов подключены непосредственно к выходу блока синхронизации и кодирования, с которым через линию задержки соединен второй сигнальный вход коммутатора сигналов, управляющий вход которого через таймер подключен к выходу временного селектора, второй вход которого соединен с выходом каналов пеленгации ракет, а выход коммутатора сигналов подключен ко входу каналов передачи команд управления.
| СИСТЕМА НАВЕДЕНИЯ ЗЕНИТНЫХ УПРАВЛЯЕМЫХ РАКЕТ БЛИЖНЕГО ДЕЙСТВИЯ | 2006 |
|
RU2324139C1 |
| САМОХОДНАЯ ОГНЕВАЯ УСТАНОВКА ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ, НАВЕДЕНИЯ И ПУСКА РАКЕТ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ | 2007 |
|
RU2333450C1 |
| US 5474255 A, 12.12.1995 | |||
| US 5435503 A, 27.08.1993. | |||

