Предлагаемое изобретение относится к оборонной технике и может использоваться в зенитных ракетных комплексах (ЗРК) для защиты военных и промышленных объектов от низколетящих самолетов, вертолетов, ракет и других малоразмерных средств воздушного нападения в пределах ближней тактической зоны до 30 км.
В настоящее время в нашей стране и за рубежом придается большое значение разработке высокоточных систем наведения зенитных управляемых ракет (ЗУР), обеспечивающих эффективное поражение нескольких малоразмерных воздушных целей в одном залпе. При этом точности наведения ракет в различных погодных условиях и наличии организованных противником помех уделяется первостепенное значение.
Известны ЗРК, в которых используется система наведения (СН) ракет, построенная на основе трехточечного метода телеуправления с определением координат целей и ракет с помощью радиолокационных систем и передачей команд управления на ракеты по командной радиолинии связи. Например, система наведения ЗРК «Patriot» PAC-2 (Jane's Land-Based Air Defence, 2000-2001, pp.308-316), содержащая на командном пункте (КП) радиолокационную станцию (РЛС) поиска, обнаружения целей и наведения ракет, радиопередатчик, вычислитель (цифровой процессор) команд управления, а на ракете - радиоприемник команд, радиоответчик, радиолокационную головку самонаведения (ГСН), аппаратуру управления и рулевой привод.
Основным недостатком указанной СН является:
- низкая вероятность обнаружения низколетящих малоразмерных целей, использующих технологии «стелс»;
- низкая помехоустойчивость в условиях организованных противником радиопомех.
В качестве прототипа заявленному устройству принята СН зенитного комплекса «Акаш» ближнего действия до 27 км (журнал «Зарубежное военное обозрение», №9, 2001, стр.38-40), способная наводить ракеты по нескольким целям. В этой СН реализовано радиокомандное наведение ракет с помощью РЛС и радиолокационной ГСН. Прототип содержит на командном пункте аппаратуру навигации, РЛС поиска, захвата и автосопровождения целей и наведения ракет, вычислитель для управления РЛС и выработки команд управления ракетами, видеомонитор, механизмы вертикального и горизонтального наведения КП, аппаратуру подготовки и пуска ракет, а на ракете содержится радиоприемник, радиоответчик, аппаратура управления и рулевой привод.
Основные недостатки указанной радиолокационной командой СН следующие:
- низкая вероятность обнаружения низколетящих малоразмерных целей, использующих технологии «стелс», делающие их слабоконтрастными в радиолокационном отношении;
- большое время реакции (15 с) из-за низкого разрешения (информативности) и обработки радарной информации, что снижает вероятность поражения маскированных целей в ближней зоне обстрела;
- низкая помехоустойчивость в условиях организованных противником помех;
- возможно поражение ЗРК самонаводящимися противолокационными ракетами.
В настоящее время благодаря развитию микроэлектроники, оптики, вычислительной техники, информативных технологий и систем обработки изображений в разработке СН высокоточного управляемого вооружения находит применение оптоэлектронная система наведения (ОЭС), которая обладает в условиях оптической видимости высокой информативностью о целевой обстановке, высокой точностью наведения ракет, скрытностью, помехоустойчивостью и малым временем реакции, что особенно важно при действии в ближней тактической зоне.
Применение в ЗРК системы наведения на основе объединения радиолокационной и оптоэлектронной систем позволит повысить боевую эффективность ЗРК ближнего действия.
Задачей предлагаемого изобретения является создание СН зенитных управляемых ракет, обеспечивающей эффективное поражение нескольких малоразмерных низколетящих воздушных целей в ближней тактической зоне залповым пуском ракет в различных погодных условиях и при наличии организованных противником помех.
Решение данной задачи достигается тем, что в систему наведения ЗУР ближнего действия, содержащую на командном пункте радиолокационную станцию обнаружения целей, вычислитель, аппаратуру навигации, видеомонитор, пульт управления, подъемно-поворотную платформу с приводами ее наведения и установленной на ней радиолокационной станцией сопровождения с фазированной антенной решеткой, каналами передачи команд управления и каналами пеленгации целей и пеленгации ракет, причем выход радиолокационной станции обнаружения целей соединен с первым входом вычислителя, первый выход которого соединен с первым входом приводов наведения подъемно-поворотной платформы, выходы каналов пеленгации целей и пеленгации ракет соединены соответственно с третьим и четвертым входами вычислителя, выход аппаратуры навигации соединен со вторым входом вычислителя, второй выход которого соединен с первым входом видеомонитора, выход пульта управления соединен со вторым входом приводов наведения, и содержащую на ракете радиоприемник, радиоответчик, аппаратуру управления, выход которой соединен со входом рулевого привода, введены на командном пункте блок управления лучами, оптоэлектронная система, включающая пеленгатор ракет и теплотелевизионный прицел и установленная на подъемно-поворотной платформе, автомат сопровождения целей и блок синхронизации и кодирования, при этом выход пеленгатора ракет соединен с пятым входом вычислителя, а вход - с первым выходом блока синхронизации и кодирования, второй выход которого соединен со входом каналов передачи команд управления, а вход - с третьим выходом вычислителя, четвертый выход которого соединен со входом блока управления лучами, выход которого соединен со вторым входом фазированной антенной решетки, а выход теплотелевизионного прицела соединен со вторым входом видеомонитора и входом автомата сопровождения целей, выход которого соединен с третьим входом приводов наведения, а на ракете введены лазерный ответчик и дешифратор команд управления, первый вход которого соединен с выходом радиоприемника, первый выход - со входом радиоответчика, второй выход - со входом лазерного ответчика, третий выход - со входом аппаратуры управления, а второй вход соединен до старта с третьим выходом блока синхронизации и кодирования командного пункта.
Изобретение поясняется чертежом, где представлена блок-схема предлагаемой СН, содержащая 1 - командный пункт, 2 - аппаратура навигации, 3 - вычислитель, 4 - видеомонитор, 5 - РЛС обнаружения целей, 6 - пульт управления оператора, 7 - блок синхронизации и кодирования, 8 - приводы наведения платформы, 9 - автомат сопровождения целей, 10 - подъемно-поворотная платформа, 11 - РЛС сопровождения целей и ракет, 12 - каналы пеленгации целей, 13 - каналы пеленгации ракет, 14 - каналы передачи команд управления ракетами, 15 - блок управления лучами, 16 - фазированная антенная решетка (ФАР), 17 - оптоэлектронная система, 18 - многоканальный оптический пеленгатор ракет, 19 - теплотелевизионный прицел, 20 - ракета, 21 - радиоответчик, 22 - радиоприемник, 23 - дешифратор команд управления, 24 - лазерный ответчик, 25 - аппаратура управления, 26 - рулевой привод.
В заявленной СН реализовано объединение радиолокационной и оптоэлектронной командных систем наведения, работающих одновременно или в раздельных режимах, что обеспечивает поражение воздушных целей с низкой радарной сигнатурой отражения путем переключения радиолокационной на оптоэлектронную систему наведения до или после пуска ЗУР на дальностях оптической видимости целей.
Работа СН в радиолокационном режиме осуществляется следующим образом.
Поиск и обнаружение воздушных целей осуществляется РЛС обнаружения целей 5. Измеренные РЛС координаты целей (дальность, азимут и угол места) поступают в вычислитель 3, где вырабатываются и выводятся на видеомонитор 4 данные о целях и порядок обстрела. В вычислитель также поступает информация о координатах неподвижного или движущегося КП с аппаратуры навигации 2.
При подлете целей к определенному рубежу с вычислителя подаются команды на приводы наведения 8 подъемно-поворотной платформы 10, что обеспечивает разворот РЛС сопровождения 11 по азимуту и углу места в направлении приоритетных целей. Одновременно в вычислителе на основании данных целеуказания с РЛС обнаружения и аппаратуры навигации 2 осуществляется привязка каждой цели к системе координат КП, распределение ракет залпа по целям и вырабатываются команды в блок управления лучами 15, на основании которых лучи, сформированные ФАР, направляются на выбранные цели для захвата и автосопровождения каналами пеленгации целей 12.
Управление ракетами осуществляется относительно оси лучей, формируемых ФАР через блок управления лучами. Координаты ракет относительно оси лучей определяются каналами пеленгации ракет 13 по сигналам, поступающим с радиоответчиков 21, и передаются в вычислитель 3. В вычислителе вырабатываются команды управления по азимуту и углу места, пропорциональные линейным отклонениям ракет от оси лучей. Команды управления передаются с блока синхронизации и кодирования 7, в котором осуществляется их кодирование и синхронная передача в каналы передачи команд управления 14.
Распределение ракет в залпе по целям производится блоком синхронизации и кодирования 7, осуществляющем общую синхронизацию каналов пеленгации ракет и каналов передачи команд управления. Команды управления и команды запрета радио- и лазерных ответчиков ракет формируются в блоке 7 в виде кодовой последовательности импульсов, в которой адрес ракеты закодирован в виде временного интервала комбинации импульсов. Для каждой ракеты до пуска по каналу связи с блока 9 (выход 3) в дешифратор команд 23 (вход 2) передается и записывается конкретный адрес ракеты, являющийся электронным ключом к последующей расшифровке передаваемой информации, при этом во время пуска расшифровывается только «своя» информация, а радиоответчик 21 и лазерный ответчик 24 отвечают только на «свой» запрос с РЛС 11 командного пункта. Таким образом осуществляется литерная связь КП с каждой конкретной ракетой.
На видеомонитор 4 для оператора с вычислителя 3 поступают координаты целей, информация о распределении ракет по целям и готовности систем к пуску ракет.
Предлагаемая СН в радиолокационном режиме в пуске ракет работает следующем образом. В момент пуска 1-й ракеты блок синхронизации и кодирования 7 по сигналу вычислителя передает по каналу (выход 3) информацию в дешифратор команд 23 ракеты о записи адреса 1-й ракеты. Одновременно с этим блок управления лучами 15 формирует луч ФАР, направленный в поле встреливания ракеты. На основании данных целеуказания с каналов пеленгации целей 12 вычислитель 3 формирует команды управления лучом таким образом, чтобы при пуске ракеты формировался широкий луч, обеспечивающий захват ракеты и ввод ее в узкий луч. После ввода ракеты в узкий луч положение его в пространстве формируется по азимуту и углу места, совпадающим с положением в пространстве выбранной цели.
Канал передачи команд управления 14 через ФАР посылает сигнал запроса радиоответчика, а на ракете радиоприемник 22 обеспечивает прием закодированной информации, передает ее в дешифратор 23, литерная команда с которого запускает радиоответчик 21. Сигналы радиоответчика через ФАР поступают в каналы пеленгации ракет 13, где вырабатываются координаты ракеты, которые поступают в вычислитель, где определяются линейные отклонения ракеты от оси луча, направленного на выбранную цель, и вырабатываются команды управления. Команды управления поступают в блок синхронизации и кодирования 14 и через ФАР излучаются в направлении ракеты.
Принятые радиоприемником 22 команды декодируются в дешифраторе 23 и поступают в аппаратуру управления 25 для управления аэродинамическим рулевым приводом 26, в результате чего ракета движется по оси луча.
Аналогичным образом производится наведение других ракет в радиолокационном режиме работы СН. Электромагнитная совместимость СН обеспечивается за счет временного разделения обращений к каждой ракете.
В случае нападения воздушных целей с низкой радиолокационной сигнатурой отражения или применения противником радиолокационных помех в предлагаемой СН используется оптоэлектронный режим пеленгации целей и наведения ракет в залпе в условиях оптической видимости. Этот режим обеспечивает высокую информативность о целях, высокую точность наведения ракет, скрытность поиска целей и малое время реакции. В этом режиме СН работает следующим образом.
Оператор с пульта 6 подает команды на приводы 8 подъемно-поворотной платформы 10 и осуществляет наведение линии визирования прицела 19 по азимуту и углу места. На видеомониторе 4 воспроизводится обозреваемое прицелом пространство и условия стрельбы. Обнаружив и распознав цели на экране монитора, оператор переводит слежение за целями в автоматический режим с помощью многоканального автомата сопровождения целей 9, который управляет приводами 8 на основе отработки сигналов с прицела.
Одновременно информация о целях с прицела 19 поступает в вычислитель 3, в котором осуществляется определение координат целей (дальность, азимут и угол места), дается электронный адрес каждой цели и порядок их обстрела. Сигналы с вычислителя об электронном адресе ракет поступают в блок синхронизации и кодирования 7, который осуществляет синхронную передачу команд управления ракетами согласно адресу и кодирует работу лазерного ответчика 24 и каналов пеленгации ракет 18. Для каждой ракеты до пуска по каналу связи с блока 7 (выход 3) в дешифратор ракеты 23 (вход 2) и в пеленгатор ракет 18 передается и записывается конкретный адрес ракеты, что является электронным ключом для расшифровки команд управления с блока 14 и восприятия пеленгатором 18 излучения ответчика 24 конкретной ракеты.
Оператор после получения на экране монитора информации о приоритетных целях, порядке их обстрела производит пуск ракет.
После встреливания ракет в поле зрения многоканальный пеленгатор 18 выделяет координаты каждой ракеты (азимут, угол места) относительно оптической оси и передает их в вычислитель 3. Вычислитель на основании координат целей и ракет формирует команды управления каждой ракетой, пропорциональные отклонению ракеты от цели одинакового электронного адреса, и передает их в блок синхронизации и кодирования 7. С блока 7 закодированные команды управления и команды на литерное излучение ответчика 24 передаются в каналы передачи команд управления 14 и через ФАР излучаются в направление ракет.
Принятые радиоприемником 22 ракеты команды декодируются в дешифраторе 23, а затем поступают в аппаратуру управления 25, рулевой привод 26 и в лазерный ответчик для выработки сигнала излучения необходимого кода.
В предлагаемой СН, в случае пропадания информации в вычислителе 3 о координатах целей и ракет, предусмотрен автоматический переход работы СН с радиолокационного режима на оптоэлектронный и наоборот, что повышает эффективность СН.
В предлагаемой СН в качестве РЛС сопровождения на основе ФАР может быть использована РЛС типа «Небо» (журнал «Военный парад», №2, 2002 г., стр.21), а в качестве оптоэлектронной системы может быть использована система GPTTS (Jane's Electro-Optic Systems, 2004-2005, pp.81, 158).
Заявленное устройство по сравнению с известными обладает следующими преимуществами:
- обеспечивает эффективное поражение в ближней тактической зоне нескольких воздушных слабоконтрастных в радиолокационном отношении целей в условиях организованных противником радиопомех;
- обладает высокой информативностью о нападающих целях, скрытностью поиска целей и малым временем реакции в оптоэлектронном режиме работы;
- объединение в предлагаемой СН радиолокационного и оптоэлектронного режимов работы повышает вероятность поражения воздушных целей ЗРК.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА НАВЕДЕНИЯ ЗЕНИТНЫХ УПРАВЛЯЕМЫХ РАКЕТ БЛИЖНЕГО ДЕЙСТВИЯ | 2009 |
|
RU2394202C1 |
| СИСТЕМА НАВЕДЕНИЯ ВЫСОКОТОЧНОГО ОРУЖИЯ ДАЛЬНЕЙ ЗОНЫ | 2003 |
|
RU2284444C2 |
| СПОСОБ НАВЕДЕНИЯ МНОГОЦЕЛЕВОГО ВЫСОКОТОЧНОГО ОРУЖИЯ ДАЛЬНЕЙ ЗОНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2399854C1 |
| СПОСОБ НАВЕДЕНИЯ РАКЕТЫ, УПРАВЛЯЕМОЙ ЛУЧОМ РАДИОЛОКАЦИОННОЙ СТАНЦИИ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2460963C2 |
| СПОСОБ ВЫВОДА РАКЕТЫ В ЗОНУ ЗАХВАТА ЦЕЛИ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2013 |
|
RU2542691C1 |
| СПОСОБ ВЫВОДА ДАЛЬНОБОЙНОЙ РАКЕТЫ В ЗОНУ ЗАХВАТА ЦЕЛИ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И СИСТЕМА НАВЕДЕНИЯ ДАЛЬНОБОЙНОЙ РАКЕТЫ | 2015 |
|
RU2583347C1 |
| СПОСОБ НАВЕДЕНИЯ РАКЕТЫ, УПРАВЛЯЕМОЙ ЛУЧОМ РАДИОЛОКАЦИОННОЙ СТАНЦИИ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2473867C1 |
| СИСТЕМА НАВЕДЕНИЯ ВЫСОКОТОЧНОГО ОРУЖИЯ | 2015 |
|
RU2596173C1 |
| ВЕРТОЛЕТНЫЙ КОМПЛЕКС ВЫСОКОТОЧНОГО ОРУЖИЯ БЛИЖНЕГО ДЕЙСТВИЯ | 2007 |
|
RU2351508C1 |
| СПОСОБ НАВЕДЕНИЯ РАКЕТ, УПРАВЛЯЕМЫХ ПО ЛУЧУ ЛАЗЕРА, И РАКЕТНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569045C1 |
Изобретение относится к оборонной технике и может использоваться в зенитных ракетных комплексах для защиты военных и промышленных объектов от низколетящих самолетов, вертолетов и других малоразмерных средств воздушного нападения в пределах ближней тактической зоны. Технический результат - повышение эффективности поражения нескольких малоразмерных низколетящих воздушных целей в ближней тактической зоне залповым пуском ракет в различных погодных условиях и при наличии организованных противником радиопомех. Система наведения ЗУР содержит на командном пункте радиолокационную станцию обнаружения целей, вычислитель, аппаратуру навигации, видеомонитор, пульт управления, подъемно-поворотную платформу с приводами ее наведения и установленной на ней радиолокационной станцией сопровождения с фазированной антенной решеткой, каналами передачи команд управления и каналами пеленгации целей и пеленгации ракет. На каждой ракете содержится радиоприемник, радиоответчик, аппаратура управления, выход которой соединен со входом рулевого привода. На командном пункте дополнительно введены блок управления лучами, оптоэлектронная система, включающая пеленгатор ракет и теплотелевизионный прицел, автомат сопровождения целей и блок синхронизации и кодирования. 1 ил.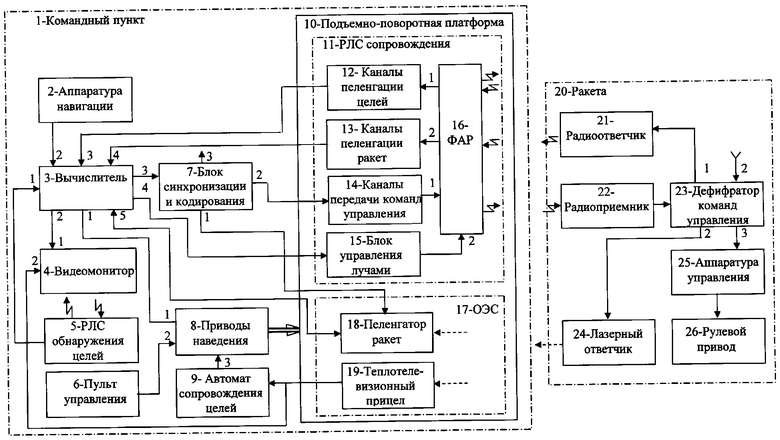
Система наведения зенитных управляемых ракет ближнего действия, содержащая на командном пункте радиолокационную станцию обнаружения целей, вычислитель, аппаратуру навигации, видеомонитор, пульт управления, подъемно-поворотную платформу с приводами ее наведения и установленной на ней радиолокационной станцией сопровождения с фазированной антенной решеткой, каналами передачи команд управления и каналами пеленгации целей и пеленгации ракет, причем выход радиолокационной станции обнаружения целей соединен с первым входом вычислителя, первый выход которого соединен с первым входом приводов наведения подъемно-поворотной платформы, выходы каналов пеленгации целей и пеленгации ракет соединены соответственно с третьим и четвертым входами вычислителя, выход аппаратуры навигации соединен со вторым входом вычислителя, второй выход которого соединен с первым входом видеомонитора, выход пульта управления соединен со вторым входом приводов наведения, и содержащая на ракете радиоприемник, радиоответчик, аппаратуру управления, выход которой соединен со входом рулевого привода, отличающаяся тем, что она снабжена на командном пункте блоком управления лучами, установленной на подъемно-поворотной платформе оптоэлектронной системой, включающей пеленгатор ракет и теплотелевизионный прицел, автоматом сопровождения целей и блоком синхронизации и кодирования, при этом выход пеленгатора ракет соединен с пятым входом вычислителя, а вход - с первым выходом блока синхронизации и кодирования, второй выход которого соединен со входом каналов передачи команд управления, а вход - с третьим выходом вычислителя, четвертый выход которого соединен со входом блока управления лучами, выход которого соединен со вторым входом фазированной антенной решетки, а выход теплотелевизионного прицела соединен со вторым входом видеомонитора и входом автомата сопровождения целей, выход которого соединен с третьим входом приводов наведения, а каждая ракета снабжена лазерным ответчиком и дешифратором команд управления, первый вход которого соединен с выходом радиоприемника, первый выход - со входом радиоответчика, второй выход - со входом лазерного ответчика, третий выход - со входом аппаратуры управления, а второй вход соединен до старта с третьим выходом блока синхронизации и кодирования командного пункта.
| ПАНОВ.В | |||
| Индийский зенитный ракетный комплекс "АКАШ" | |||
| - Зарубежное военное обозрение, №9, 2001, с.38-40 | |||
| БОЕВАЯ МАШИНА | 2003 |
|
RU2244242C1 |
| ЗЕНИТНАЯ САМОХОДНАЯ УСТАНОВКА | 1998 |
|
RU2135924C1 |
| US 5062586 А, 05.11.1991 | |||
| Аза-арил-1Н-пиразол-1-ил-сульфонамиды | 2013 |
|
RU2627268C2 |

