Предлагаемое устройство относится к оборонной технике и может использоваться в комплексах управляемого вооружения для поражения одиночных и групповых бронированных целей, пунктов управления, огневых средств и других важных малоразмерных целей на глубину тактической зоны до 100 км.
В настоящее время в нашей стране и за рубежом придается большое значение разработке систем наведения высокоточного оружия, обеспечивающих эффективное поражение малоразмерных целей в одном залпе на больших дальностях. Создание высокоточного оружия дальней зоны рассматривается зарубежными военными специалистами в качестве одного из основных направлений совершенствования полевой артиллерии. При этом вопросам точности наведения боеприпасов придается первостепенное значение.
Отечественная дальнобойная (до 90 км) реактивная система залпового огня (РСЗО) «Смерч» с системой наведения, основанной на коррекции траектории полета снаряда на активном и части пассивном участках с помощью инерциальных датчиков и двигателей коррекции, не отвечает современным требованиям, т.к. имеет вероятностное круговое отклонение точек падения боеприпасов относительно целей на уровне (0,3%-0,4%)Х, где Х - дальность до цели [1]. Стрельба такими РСЗО на большие дальности становится неэффективной, а поражение малоразмерных целей - маловероятно. Для поражения одной цели типа «танк» необходимо произвести пуск РСЗО в количестве более 80 ракет.
С целью модернизации и повышения точности наведения артиллерийских снарядов большой дальности некоторые американские и западноевропейские фирмы приступили к созданию систем наведения, использующих для коррекции траектории полета снаряда данные космической радионавигационной системы (КРНС) NAVSTAR. Например, В США приступили к разработке перспективных снарядов ХМ982 и ERGM дальностью стрельбы 57 км и 120 км соответственно для поражения бронированных целей [2]. Аппаратура управления этих снарядов включает инерциальную систему (ИНС), приемник радиосигналов КРНС, вычислительный процессор и аэродинамический рулевой привод. Командный пункт включает вычислитель, контрольно-пусковую аппаратуру, системы прицеливания, топопривязки и космической навигации. Это позволяет в процессе полета определить пространственное положение и координаты снаряда относительно цели и формировать команды управления рулевым приводом.
По данным разработчиков [2] вероятностная круговая ошибка таких снарядов составляет 20 м. При этом вероятность попадания снаряда в цель типа «танк» не превышает 0,1, что не отвечает требованиям, предъявляемым к высокоточному оружию.
Анализ развития артиллерийского оружия большой дальности показывает, что обеспечение высокой точности и, следовательно, высокой эффективности поражения малоразмерных целей с вероятностью не менее 0,5-0,7 может быть достигнуто только применением автоматизированной системы наведения, осуществляющей управление снарядом (ракетой) на всех участках траектории полета.
В качестве прототипа заявляемому устройству служит система наведения многоцелевого противотанкового ракетного комплекса (ПТРК) EFOG-M дальностью действия в перспективе до 100 км, разработка которого ведется в США [3]. Эта система наведения включает ИНС с коррекцией по данным КРНС NAVSTAR, командную систему передачи оператору изображения фоноцелевой обстановки (ФЦО) и ручного управления ракетой по волоконно-оптическому кабелю (ВОК), а также систему самонаведения на конечном участке на основе тепловизионной головки самонаведения (ГСН).
Указанная система наведения содержит на ракете ИНС, приемник КРНС, аппаратуру управления с вычислителем, катушку ВОК, тепловизионную ГСН и аэродинамический рулевой привод, а на командном пункте содержит блок приема данных космической разведки, систему топопривязки, блок приема изображения ФЦО и передачи команд управления во ВОК, видеомонитор и систему прицеливания.
По мнению разработчиков, эффективность стрельбы комплексом EFOG-M обеспечивается тем, что оператор осуществляет ручное управление ракетой на всех участках ее полета. Передача информации оператору о ФЦО и выдача им команд управления ракетой осуществляется по ВОК. При этом ручное наведение ракеты накладывает существенное ограничение на максимальную скорость ракеты и исключает возможность одновременного наведения нескольких ракет. Скорость ракеты EFOG-M не превышает 125 м/с.
Разрабатываемый Германией, Францией и Италией ракетный комплекс «Полифен» [3] имеет систему наведения, аналогичную комплексу EFOG-M. Управление ракетой на дальности до 60 км в нем также осуществляется по ВОК, скорость ракеты не превышает 220 м/с.
Указанный прототип имеет следующие основные недостатки:
- не обеспечивает залповую стрельбу ракетами по нескольким целям из-за ручного наведения;
- не обеспечивает эффективную стрельбу по движущимся целям на больших дальностях вследствие большого времени полета ракеты (480 с для ракеты EFOG-M). За это время движущаяся со скоростью 10-15 м/с цель типа «танк» пройдет расстояние 4,8-7,2 км и с большой вероятностью может скрыться за складками местности, преграду или различные строения;
- имеет сложный аппаратурный состав ракеты из-за наличия ИНС с прецизионными гироскопическими приборами, аппаратуры КРНС и катушки ВОК, что увеличивает стоимость ракеты.
Задачей предлагаемого изобретения является создание системы наведения высокоточного оружия дальней зоны, обеспечивающей эффективное поражение нескольких неподвижных и движущихся малоразмерных целей в глубине боевых порядков противника залповым пуском высокоскоростных управляемых ракет.
Решение данной задачи достигается тем, что в систему наведения высокоточного оружия дальней зоны, содержащую на командном пункте блок приема данных целеуказания, вход которого соединен радиолинией с системой воздушного целеуказания, а выход соединен с первым входом вычислителя, второй вход которого соединен с выходом системы топопривязки, а первый выход соединен со входом видеомонитора, и содержащую на ракете тепловизионную головку самонаведения, аппаратуру управления, первый выход которой соединен со входом рулевого привода, введены на командном пункте радиолокационная станция с фазированной антенной решеткой, каналами пеленгации ракет, каналами передачи команд управления и блоком управления лучом и блок синхронизации и кодирования, при этом выходы каналов пеленгации ракет соединены с третьим входом вычислителя, второй выход которого соединен со входом блока управления лучом, а третий выход соединен со входом блока синхронизации и кодирования, первый выход которого соединен с первыми входами каналов пеленгации ракет, второй выход - со входами каналов передачи команд управления, выход блока управления лучом соединен с первым входом фазированной антенной решетки, второй вход которой соединен с выходами каналов передачи команд управления, а выход - со вторыми входами каналов пеленгации ракет, а на ракете введены радиоответчик, радиоприемник, дешифратор команд управления и переключатель команд, при этом второй выход аппаратуры управления соединен со входом радиоответчика, а вход - с выходом переключателя команд, первый вход которого соединен с выходом тепловизионной головки самонаведения, второй вход - с выходом дешифратора команд управления, первый вход которого соединен до старта с третьим выходом блока синхронизации и кодирования, а второй вход - с выходом радиоприемника,.
На чертеже представлена блок-схема предлагаемой системы наведения, где 1 - командный пункт, 2 - радиолокационная станция (РЛС), 3 - каналы пеленгации ракет РЛС, 4 - каналы передачи команд управления РЛС, 5 - блок управления лучом, 6 - блок приема данных целеуказания, 7 - система воздушного целеуказания, 8 - вычислитель, 9 - блок синхронизации и кодирования, 10 - система топопривязки, 11 - видеомонитор, 12 - фазированная антенная решетка (ФАР), 13 - управляемая ракета, 14 - тепловизионная ГСН, 15 - радиоответчик, 16 - радиоприемник, 17 - дешифратор команд управления, 18 - аппаратура управления, 19 - переключатель команд, 20 - рулевой привод.
В предлагаемой системе наведения реализовано комбинированное управление ракетами в залпе: радиокомандное телеуправление на начальном и среднем участках траектории полета и автономное самонаведение на участке подлета ракет к целям. Заявляемое устройство работает следующим образом.
Поиск, распознавание и определение координат неподвижных и движущихся целей, расположенных за горизонтом или складками местности, осуществляется системой воздушного целеуказания 7, например дистанционно пилотируемым летательным аппаратом «Пчела-1» [4]. Информация о координатах целей и соответствующая электронная карта местности в зашифрованном виде передается по радиолинии в блок приема данных целеуказания 6 командного пункта 1 и далее поступает в вычислитель 8. Одновременно в вычислитель поступает информация о координатах командного пункта с системы топопривязки 10.
При поступлении информации о координатах целей и командного пункта в вычислителе 8 осуществляется привязка каждой цели в связанной с командным пунктом системе координат (вычисляются углы азимута, места и дальности до целей) и распределение ракет залпа по целям. В вычислителе 8 на основании данных целеуказания в системе координат командного пункта формируются команды управления лучами РЛС таким образом, чтобы обеспечить их движение на заданный угол места и в направлении выбранной цели в горизонтальной плоскости.
Управление ракетами осуществляется относительно осей лучей, формируемых фазированной антенной решеткой (ФАР) 12 по данным целеуказания и по программе, заложенной в вычислителе, через блок управления лучом 5. Координаты ракет в измерительной системе координат определяются каналами пеленгации ракет 3 по сигналам, поступающим с радиоответчиков 15 ракет, и передаются в вычислитель 8. В вычислителе определяются команды управления по азимуту и углам места, пропорциональные линейным отклонениям ракет от осей луча. Вычисленная информация передается в блок синхронизации и кодирования 9, в котором осуществляется ее кодирование и синхронная передача в канал передачи команд управления 4 РЛС, одновременно блок синхронизации и кодирования обеспечивает стробирование канала пеленгации ракет 3.
Программное управление лучами по вертикали и управление ракетами относительно осей лучей обеспечивает необходимую дальность полета и вывод ракет в зону захвата ГСН с углами подхода, близкими к 90°, что является наилучшим условием для захвата целей головками самонаведения, так как обнаружение и селекция целей ГСН ведется под постоянным углом и анализируется меньший участок ФЦО.
Распределение ракет в залпе по целям осуществляется по сигналам с вычислителя блоком синхронизации и кодирования 9. Блок 9 осуществляет общую синхронизацию каналов пеленгации ракет и каналов передачи команд управления. Команды управления и команды запрета ответчиков формируются в блоке 9 в виде кодовой последовательности импульсов, в которой адрес ракеты закодирован в виде временного интервала комбинации импульсов. Для каждой ракеты до пуска по каналу связи в дешифратор 17 ракеты передается и записывается конкретный адрес ракеты, являющийся "электронным ключом" к последующей расшифровке передаваемой информации, при этом расшифровывается только "своя" информация, а радиоответчик ракеты отвечает только на "свой" запрос.
На видеомонитор 11 для оператора с вычислителя поступают карта местности, координаты целей на местности, информация о распределении ракет по целям, траектории полета ракет и готовности систем к пуску ракет.
Система наведения высокоточного оружия дальней зоны в пуске работает следующим образом. В момент пуска 1-ой ракеты блок синхронизации и кодирования 9 по сигналу вычислителя передает информацию в дешифратор команд управления 17 ракеты о записи адреса 1-ой ракеты. Одновременно с этим блок управления лучом формирует луч ФАР, направленный в поле встреливания ракеты. Канал передачи команд управления 4 РЛС через ФАР посылает сигнал запроса радиоответчика, а на ракете радиоприемник 16 обеспечивает прием закодированной информации, передает ее в дешифратор, который через переключатель команд 19 и аппаратуру управления 18 запускает радиоответчик. Сигналы радиоответчика через ФАР 12 поступают в канал пеленгации ракет 3, где вырабатываются координаты ракеты по дальности, углу места и азимуту в измерительной системе координат. Координаты ракеты поступают в вычислитель, где определяется линейное отклонение ракеты от равносигнального направления луча (его оси) и вырабатываются команды управления, поступающие в блок синхронизации и кодирования 9, где кодируются, передаются в канал передачи команд управления и через ФАР излучаются в направлении ракеты.
На основании данных целеуказания в вычислителе 8 через блок управления лучом 5 формируются команды управления лучом таким образом, чтобы при пуске ракеты формировался широкий луч, обеспечивающий захват ракеты и ввод ее в узкий луч. После ввода ракеты в узкий луч положение его в пространстве формируется по курсу, совпадающему с азимутом цели, а по углу места осуществляется программное управление лучом на заданный угол.
Таким образом, канал пеленгации ракеты осуществляет захват ракеты и ее пеленгацию относительно оси луча, изменяющей свое направление в зависимости от данных целеуказания и программной дальности, заложенной в вычислителе, а канал передачи команд управления обеспечивает передачу через ФАР кодированной информации на ракету, при этом блок синхронизации и кодирования производит общую синхронизацию РЛС, а также запись адреса ракеты в момент ее пуска.
Аналогичным образом производится радиокомандное наведение других ракет. Электромагнитная совместимость системы обеспечивается за счет временного разделения обращений к каждой ракете.
В предлагаемом устройстве в качестве многофункциональной РЛС на основе ФАР может быть использована, например, трехкоординатная РЛС типа "Небо" 151 или типа "Раджендра" (США).
Вывод ракет по программным траекториям в зону захвата целей ГСН с помощью радиокомандного управления по сравнению с выводом инерциальной навигационной системой с космической коррекцией, является наиболее простым и эффективным методом парирования отклонения ракет от программных траекторий, обусловленного рассеиванием ракет, разбросом углов пуска и изменением параметров движения целей.
Принятые радиоприемником 16 на ракете команды управления декодируются в дешифраторе команд управления 17 и через переключатель команд 19 поступают в аппаратуру управления 18, где преобразуются в сигналы управления аэродинамическим рулевым приводом 20. В результате возникают боковые перегрузки, парирующие отклонение ракеты от заданной траектории. Аппаратура управления также обеспечивает кодирование излучения радиоответчика в соответствии с видом, записанным в ее память перед пуском ракеты.
При достижении ракеты определенной программной дальности до цели на ее борт передается команда управления в вертикальной плоскости, обеспечивающая ее вывод в зону захвата цели ГСН с углом подхода ˜90°. Тепловизионная ГСН осуществляет автономный поиск, распознавание и сопровождение цели по ее тепловому излучению и выдает сигнал «захват» цели в переключатель команд 19. По этому сигналу в предлагаемой системе происходит переход управления ракетой с радиокомандного режима в режим самонаведения по методу пропорционального сближения, который обеспечивает высокоточное наведение ракеты на цель. В этом случае ГСН вырабатывает сигналы, пропорциональные отклонению и угловой скорости линии «ракета-цель», поступающие через переключатель команд и аппаратуру управления на рулевой привод, в соответствии с которыми ракета наводится на цель.
Заявляемое устройство по сравнению с известными обладает следующими преимуществами:
- обеспечивает точное наведение на большие дальности высокоскоростных ракет в залпе на неподвижные и движущиеся малоразмерные цели, расположенные в глубине боевых порядков противника;
- имеет простой аппаратурный состав ракеты, т.к. по сравнению с ракетой известных систем наведения не содержит сложную инерциальную навигационную систему, аппаратуру космической коррекции и катушку волоконно-оптического кабеля;
- обеспечивает вывод ракет в зону захвата ГСН с углами подхода к целям, близкими 90°, что является наилучшим условием для селекции целей ГСН.
Источники информации
1. Журнал «Военный парад», №2, 2002 г., стр.74-75.
2. Журнал «Зарубежное военное обозрение», №4, 2001 г., стр.26.
3. Журнал «Зарубежное военное обозрение», №2, 2001 г., стр.24-28 (прототип).
4. Журнал «Военный парад», №4, 2002 г., стр.32.
5. Журнал «Военный парад», №2, 2002 г., стр.21.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ МНОГОЦЕЛЕВОГО ВЫСОКОТОЧНОГО ОРУЖИЯ ДАЛЬНЕЙ ЗОНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2399854C1 |
| СПОСОБ НАВЕДЕНИЯ РАКЕТЫ, УПРАВЛЯЕМОЙ ЛУЧОМ РАДИОЛОКАЦИОННОЙ СТАНЦИИ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2460963C2 |
| СПОСОБ НАВЕДЕНИЯ РАКЕТЫ, УПРАВЛЯЕМОЙ ЛУЧОМ РАДИОЛОКАЦИОННОЙ СТАНЦИИ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2473867C1 |
| СИСТЕМА НАВЕДЕНИЯ ВЫСОКОТОЧНОГО ОРУЖИЯ | 2015 |
|
RU2596173C1 |
| СПОСОБ ВЫВОДА РАКЕТЫ В ЗОНУ ЗАХВАТА ЦЕЛИ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2013 |
|
RU2542691C1 |
| СПОСОБ ВЫВОДА ДАЛЬНОБОЙНОЙ РАКЕТЫ В ЗОНУ ЗАХВАТА ЦЕЛИ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И СИСТЕМА НАВЕДЕНИЯ ДАЛЬНОБОЙНОЙ РАКЕТЫ | 2015 |
|
RU2583347C1 |
| СИСТЕМА НАВЕДЕНИЯ ЗЕНИТНЫХ УПРАВЛЯЕМЫХ РАКЕТ БЛИЖНЕГО ДЕЙСТВИЯ | 2006 |
|
RU2324139C1 |
| СИСТЕМА НАВЕДЕНИЯ ЗЕНИТНЫХ УПРАВЛЯЕМЫХ РАКЕТ БЛИЖНЕГО ДЕЙСТВИЯ | 2009 |
|
RU2394202C1 |
| Способ одновременного наведения управляемых ракет с лазерными полуактивными головками самонаведения и устройство для его осуществления | 2017 |
|
RU2657356C1 |
| СИСТЕМА ПРИЦЕЛИВАНИЯ ОРУЖИЯ | 2021 |
|
RU2784528C1 |
Изобретение относится к оборонной технике и может использоваться в комплексах управляемого вооружения для поражения неподвижных и движущихся малоразмерных целей, расположенных в глубине боевых порядков противника. Технический результат - повышение эффективности высокоточного оружия дальней зоны. В систему наведения высокоточного оружия дальней зоны, содержащую на командном пункте блок приема данных целеуказания, вход которого соединен радиолинией с системой воздушного целеуказания, а выход соединен с первым входом вычислителя, второй вход которого соединен с выходом системы топопривязки, а первый выход соединен со входом видеомонитора, и содержащую на ракете тепловизионную головку самонаведения, аппаратуру управления, первый выход которой соединен со входом рулевого привода, введены на командном пункте радиолокационная станция с фазированной антенной решеткой, каналами пеленгации ракет, каналами передачи команд управления и блоком управления лучом и блок синхронизации и кодирования. При этом выходы каналов пеленгации ракет соединены с третьим входом вычислителя, второй выход которого соединен со входом блока управления лучом, а третий выход соединен со входом блока синхронизации и кодирования, первый выход которого соединен с первыми входами каналов пеленгации ракет, второй выход - со входами каналов передачи команд управления, выход блока управления лучом соединен с первым входом фазированной антенной решетки, второй вход которой соединен с выходами каналов передачи команд управления, а выход - со вторыми входами каналов пеленгации ракет. На ракете введены радиоответчик, радиоприемник, дешифратор команд управления и переключатель команд, при этом второй выход аппаратуры управления соединен со входом радиоответчика, а вход - с выходом переключателя команд, первый вход которого соединен с выходом тепловизионной головки самонаведения, второй вход - с выходом дешифратора команд управления, первый вход которого соединен до старта с третьим выходом блока синхронизации и кодирования, а второй вход - с выходом радиоприемника. 1 ил.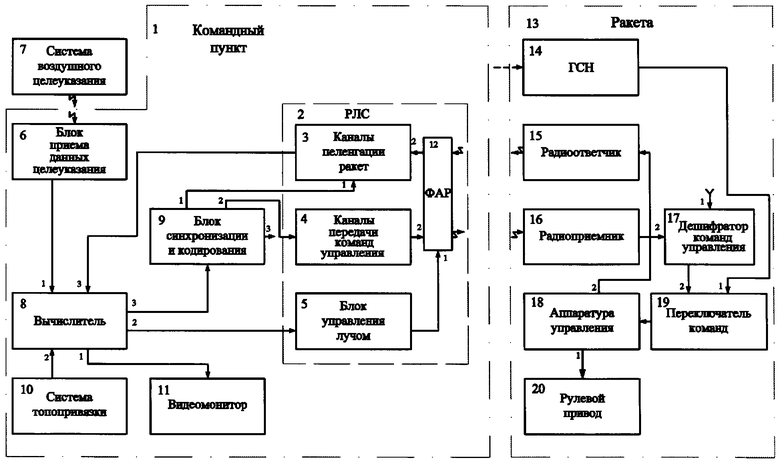
Система наведения высокоточного оружия дальней зоны, содержащая на командном пункте блок приема данных целеуказания, вход которого соединен радиолинией с системой воздушного целеуказания, а выход соединен с первым входом вычислителя, второй вход которого соединен с выходом системы топопривязки, а первый выход соединен со входом видеомонитора, а на ракете тепловизионную головку самонаведения и аппаратуру управления, первый выход которой соединен со входом рулевого привода, отличающаяся тем, что в нее введены на командном пункте радиолокационная станция с фазированной антенной решеткой, каналами пеленгации ракет, каналами передачи команд управления и блоком управления лучом и блок синхронизации и кодирования, при этом выходы каналов пеленгации ракет соединены с третьим входом вычислителя, второй выход которого соединен со входом блока управления лучом, а третий выход - со входом блока синхронизации и кодирования, первый выход которого соединен с первыми входами каналов пеленгации ракет, второй выход - со входами каналов передачи команд управления, выход блока управления лучом соединен с первым входом фазированной антенной решетки, второй вход которой соединен с выходами каналов передачи команд управления, а выход - со вторыми входами каналов пеленгации ракет, а на ракете введены радиоответчик, радиоприемник, дешифратор команд управления и переключатель команд, при этом второй выход аппаратуры управления соединен со входом радиоответчика, а вход - с выходом переключателя команд, первый вход которого соединен с выходом тепловизионной головки самонаведения, второй вход - с выходом дешифратора команд управления, первый вход которого соединен до старта с третьим выходом блока синхронизации и кодирования, а второй вход - с выходом радиоприемника.
| ДМИТРИЕВ В | |||
| Разработка ПТРК большой дальности за рубежом, Зарубежное военное обозрение, 2001, №2, с.24-28 | |||
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТОЙ, НАВОДЯЩЕЙСЯ ПО ЛУЧУ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114372C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТОЙ, НАВОДЯЩЕЙСЯ ПО ЛУЧУ | 1994 |
|
RU2107879C1 |
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ МОЩНОСТИ СИГНАЛА И МОЩНОСТИ ПОМЕХИ В ПОЛОСЕ ПРОПУСКАНИЯ КАНАЛА РАДИОПРИЕМНИКА В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ | 2011 |
|
RU2472167C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ИНТЕРПРЕТАЦИИ ИСПЫТАНИЙ СВАБИРОВАНИЕМ С ИСПОЛЬЗОВАНИЕМ НЕЛИНЕЙНОЙ РЕГРЕССИИ | 2008 |
|
RU2474682C2 |

