Изобретение относится к области измерительной техники, а более конкретно к области измерения сопротивлений, индуктивностей и емкостей, и может быть использовано при измерении различных физических величин с помощью резистивных, индуктивных и емкостных датчиков.
Известен способ измерения сопротивлений, индуктивностей и емкостей, заключающийся в том, что осуществляют преобразование сопротивления, индуктивности или емкости в частоту и по значению частоты определяют значение измеряемого сопротивления, индуктивности или емкости (Орнатский П.П., Скрипник Ю.А., Туз Ю.М «Развитие структур измерительных устройств» в сб.: Информационно-измерительные системы, изд. Киевского государственного университета, 194, 152 с.).
Недостатком известного способа является погрешность измерения, связанная с наличием аддитивной и мультипликативной погрешности преобразования, а также с временным дрейфом характеристики преобразователя.
Наиболее близким является известный способ измерения сопротивления, индуктивности или емкости, заключающийся в том, что осуществляют четыре такта преобразования сопротивления, индуктивности или емкости в частоту и далее в код, в первом из которых измеряют частоту, связанную с величиной измеряемого сопротивления, индуктивности или емкости Zx соотношением N1=a1Zx+a0 (первый такт), где N1 - частота выходного сигнала преобразователя, а0, а1 - параметры преобразователя, далее измеряют частоту N1=a1(Zx+ZЭТ1)+а0 (второй такт), где ZЭТ1 - величина первого эталонного сопротивления, индуктивности или емкости, однородного с измеряемой величиной, далее измеряют частоту  (третий такт), где ZЭТ2 - величина второго эталонного сопротивления, индуктивности или емкости, однородного с измеряемой величиной, и, наконец, измеряют частоту
(третий такт), где ZЭТ2 - величина второго эталонного сопротивления, индуктивности или емкости, однородного с измеряемой величиной, и, наконец, измеряют частоту  (четвертый такт), а значение измеряемого сопротивления, индуктивности или емкости определяют по формуле
(четвертый такт), а значение измеряемого сопротивления, индуктивности или емкости определяют по формуле 
(Э.М.Бромберг, К.Л.Куликовский «Тестовые методы повышения точности измерений»., М., Энергия, 1978 г., 137 с.).
Недостатком известного способа является отсутствие возможности коррекции динамических погрешностей, возникающих вследствие дрейфа во времени характеристики преобразователя в процессе выполнения четырех тактов измерения, а также нерегулируемость диапазона измеряемых значений, что приводит к погрешности линейной аппроксимации функции преобразования устройства, предполагаемой при использовании способа, и возникающей в связи с этим нелинейной составляющей погрешности, не учитываемой в известном способе.
Техническим результатом способа (по первому варианту) является повышение точности измерения за счет учет дрейфа во времени аддитивной погрешности преобразования в процессе выполнения тактов измерения, а также сокращения размеров области варьирования тестовых значений, регулируемое путем выбора значений эталонных элементов, что приводит к уменьшению нелинейной погрешности преобразования.
Для описания дрейфа характеристики преобразования в узкой области изменения значений, измеряемых в тактах преобразования, достаточно либо учета дрейфа только аддитивной составляющей погрешности, либо, в случае использования преобразователя со значительной временной нестабильностью, учета дрейфа как аддитивной, так и мультипликативной составляющих погрешности преобразования. При малом времени проведения всех тактов измерения достаточно ограничиться линейным приближением зависимости изменений характеристик погрешности во времени.
Технический результат достигается тем, что в способе измерения сопротивления, индуктивности и емкости с целью коррекции временного дрейфа аддитивной составляющей погрешности преобразования последовательно осуществляют четыре такта измерения частоты колебаний, зависящей от значения измеряемого пассивного электрического элемента, при различной конфигурации частотно-зависимой цепи, причем в первом такте формируют измеряемую величину  где
где  - соответственно измеряемый пассивный электрический элемент, первый, второй третий и четвертый эталонные пассивные электрические элементы, однородные с измеряемым электрическим элементом, во втором такте, выполняемом через фиксированный промежуток времени Δt после начала первого такта, формируют измеряемую величину
- соответственно измеряемый пассивный электрический элемент, первый, второй третий и четвертый эталонные пассивные электрические элементы, однородные с измеряемым электрическим элементом, во втором такте, выполняемом через фиксированный промежуток времени Δt после начала первого такта, формируют измеряемую величину  в третьем такте преобразования, выполняемом через фиксированный промежуток времени Δt после начала второго такта, формируют измеряемую величину
в третьем такте преобразования, выполняемом через фиксированный промежуток времени Δt после начала второго такта, формируют измеряемую величину  в четвертом такте преобразования, выполняемом через фиксированный промежуток времени Δt после начала третьего такта, формируют измеряемую величину
в четвертом такте преобразования, выполняемом через фиксированный промежуток времени Δt после начала третьего такта, формируют измеряемую величину  а искомое значение измеряемого пассивного электрического элемента определяют по формуле
а искомое значение измеряемого пассивного электрического элемента определяют по формуле 
где N1, N2, N3, N4 - результаты первого второго, третьего и четвертого тактов преобразования соответственно.
Техническим результатом способа (по второму варианту) является повышение точности измерения за счет учет дрейфа во времени аддитивной и мультипликативной погрешностей преобразования в процессе выполнения тактов измерения, а также сокращения размеров области варьирования тестовых значений, регулируемое путем выбора значений эталонных элементов, что приводит к уменьшению нелинейной погрешности преобразования.
Технический результат достигается тем, что в способе измерения сопротивлений, индуктивностей и емкостей (по второму варианту) с целью коррекции временного дрейфа аддитивной и мультипликативной составляющих погрешности преобразования последовательно осуществляют пять тактов измерения частоты колебаний, зависящей от значения измеряемого пассивного электрического элемента, при различной конфигурации частотно-зависимой цепи, причем в первом такте формируют измеряемую величину  где
где  - соответственно измеряемый пассивный электрический элемент, первый, второй третий, четвертый и пятый эталонные пассивные электрические элементы, однородные с измеряемым электрическим элементом, во втором такте преобразования, выполняемом через фиксированный промежуток времени Δt после начала первого такта, формируют измеряемую величину
- соответственно измеряемый пассивный электрический элемент, первый, второй третий, четвертый и пятый эталонные пассивные электрические элементы, однородные с измеряемым электрическим элементом, во втором такте преобразования, выполняемом через фиксированный промежуток времени Δt после начала первого такта, формируют измеряемую величину  в третьем такте преобразования, выполняемом через фиксированный промежуток времени Δt после начала второго такта, формируют измеряемую величину
в третьем такте преобразования, выполняемом через фиксированный промежуток времени Δt после начала второго такта, формируют измеряемую величину  в четвертом такте преобразования, выполняемом через фиксированный промежуток времени Δt после начала третьего такта, формируют измеряемую величину
в четвертом такте преобразования, выполняемом через фиксированный промежуток времени Δt после начала третьего такта, формируют измеряемую величину  в пятом такте преобразования, выполняемом через фиксированный промежуток времени Δt после начала четвертого такта, формируют измеряемую величину
в пятом такте преобразования, выполняемом через фиксированный промежуток времени Δt после начала четвертого такта, формируют измеряемую величину  а искомое значение измеряемого пассивного электрического элемента определяют по формуле
а искомое значение измеряемого пассивного электрического элемента определяют по формуле
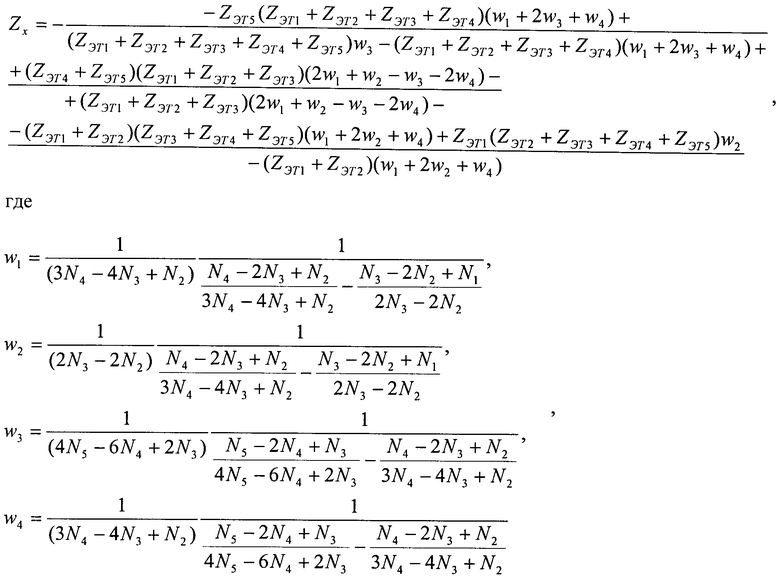
a N1, N2, N3, N4, N5 - результаты первого второго, третьего, четвертого и пятого тактов преобразования соответственно.
На фиг.1 представлен пример схемы устройства, реализующего предложенный способ (вариант первый) и предназначенного для измерения сопротивлений при временном дрейфе аддитивной составляющей погрешности преобразования.
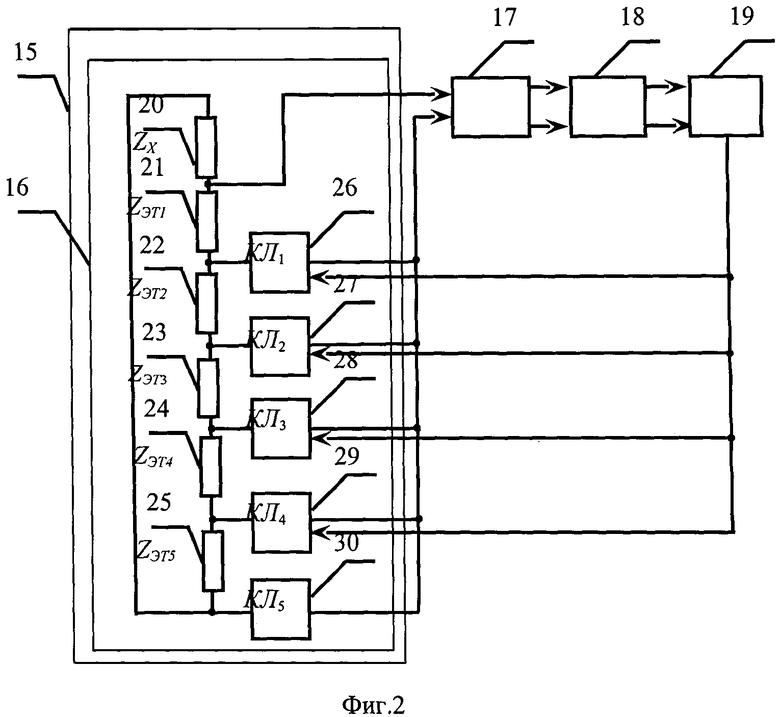
На фиг.2 представлен пример схемы устройства, реализующего предложенный способ (вариант второй) и предназначенного для измерения сопротивлений при временном дрейфе аддитивной и мультипликативной составляющих погрешности преобразования.
Сущность предлагаемого способа по первому варианту, предназначенного для коррекции дрейфа аддитивной составляющей погрешности, заключается в следующем.
Предполагается, что передаточная характеристика преобразователя в достаточно узком диапазоне изменения значений тестовых величин имеет линейный вид N=bZ+(a0+a1t), допустимость которого основана на возможности пренебрежения значением нелинейной составляющей погрешности в малом диапазоне изменения измеряемой величины. Здесь Z - преобразуемая тестовая величина, b, а0, а1 - параметры преобразователя. В процессе реализации предлагаемого способа в первом такте осуществляют измерение частоты переменного тока, связанной со значением измеряемой пассивной электрической величины соотношением  где ZX, ZЭT1, ZЭT2, ZЭT3, ZЭT4 - соответственно значения измеряемого пассивного электрического элемента, первого, второго, третьего и четвертого эталонных пассивных электрических элементов, однородных с измеряемым электрическим элементом, во втором такте формируют измеряемую величину
где ZX, ZЭT1, ZЭT2, ZЭT3, ZЭT4 - соответственно значения измеряемого пассивного электрического элемента, первого, второго, третьего и четвертого эталонных пассивных электрических элементов, однородных с измеряемым электрическим элементом, во втором такте формируют измеряемую величину  где Δt - фиксированный промежуток времени между тактами измерений. В третьем такте преобразования формируют измеряемую величину
где Δt - фиксированный промежуток времени между тактами измерений. В третьем такте преобразования формируют измеряемую величину  а в четвертом такте преобразования формируют измеряемую величину
а в четвертом такте преобразования формируют измеряемую величину 
Из полученных соотношений образуют систему уравнений, в результате решения которой определяют значение измеряемого сопротивления.
Введем обозначения:



Тогда исходная система уравнений приобретает вид




С учетом приведенных выражений значение разности результатов второго и первого, третьего и второго, четвертого и третьего тактов, измерений определяется выражениями



откуда следует


Из выписанной системы уравнений следует  .
.
Подставляя в полученное соотношение ранее выписанные выражения для х1, х2, х3, х4 получим
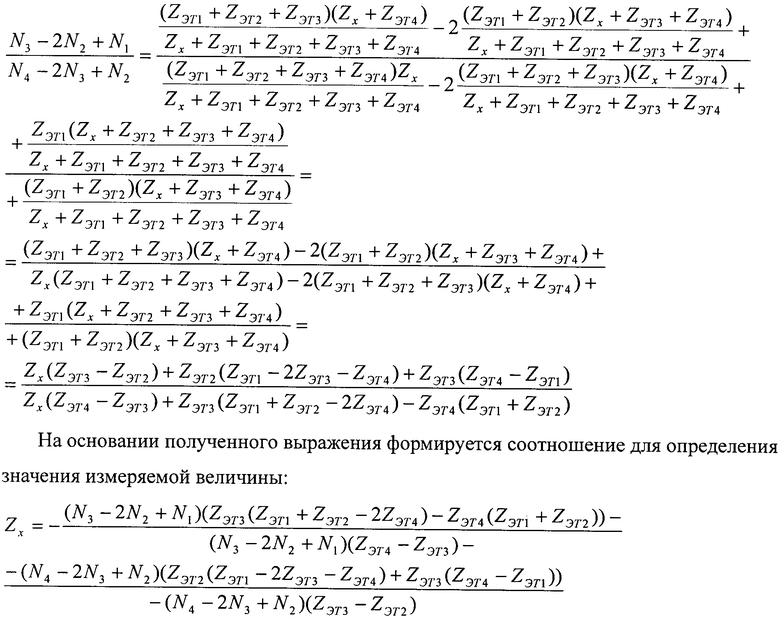
При малых значения эталонных величин ZЭT2, ZЭT3, ZЭT4 по сравнению с величиной ZЭT1 область варьирования тестовых значений может быть сделана достаточно малой для того, чтобы при достаточной чувствительности обеспечить высокую точность линейной аппроксимации передаточной характеристики преобразования в любой фиксированный момент времени. При этом значение величины ZЭT1 определяет положение области значений тестовых величин.
Из полученного выражения также следует, что результат измерения не зависит от величины промежутка времени между тактами измерений, что позволяет выбрать его значение достаточно малым, чтобы обеспечить, с одной стороны, сокращение времени измерения, а с другой, чтобы удовлетворить требование линейности дрейфа аддитивной составляющей погрешности во времени.
Сущность предлагаемого способа по второму варианту, предназначенного для коррекции дрейфа аддитивной и мультипликативной составляющих погрешности, заключается в следующем.
Предполагается, что передаточная характеристика преобразователя в достаточно узком диапазоне изменения значений тестовых величин имеет линейный вид Z=a0+a1t+(b0+b1t)N, допустимость которого основана на возможности пренебрежения значением нелинейной составляющей погрешности в малом диапазоне варьирования значений тестовых величин. Здесь Z - преобразуемая тестовая величина, b0, b1, a0, a1 - параметры преобразователя. В процессе реализации предлагаемого способа в первом такте осуществляют измерение частоты переменного тока, связанной со значением измеряемой пассивной электрической величины соотношением  где ZX, ZЭT1, ZЭT2, ZЭT3, ZЭT4, ZЭT5 - соответственно измеряемый пассивный электрический элемент, первый, второй, третий и четвертый эталонные пассивные электрические элементы, однородные с измеряемым электрическим элементом, во втором такте формируют измеряемую величину
где ZX, ZЭT1, ZЭT2, ZЭT3, ZЭT4, ZЭT5 - соответственно измеряемый пассивный электрический элемент, первый, второй, третий и четвертый эталонные пассивные электрические элементы, однородные с измеряемым электрическим элементом, во втором такте формируют измеряемую величину  где Δt - фиксированный промежуток времени между тактами измерений. В третьем такте преобразования формируют измеряемую величину
где Δt - фиксированный промежуток времени между тактами измерений. В третьем такте преобразования формируют измеряемую величину
 в четвертом такте преобразования формируют измеряемую величину
в четвертом такте преобразования формируют измеряемую величину  а в пятом такте преобразования формируют измеряемую величину
а в пятом такте преобразования формируют измеряемую величину 
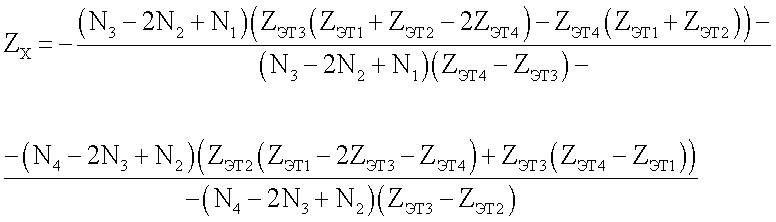
Из полученных соотношений образуют систему уравнений, в результате решения которой определяют значение измеряемого сопротивления.
Введем обозначения:

При малых значениях эталонных величин ZЭT2, ZЭT3, ZЭT4 по сравнению с величиной ZЭT1 область варьирования тестовых значений может быть сделана достаточно малой для того, чтобы при достаточной чувствительности обеспечить высокую точность линейной аппроксимации передаточной характеристики преобразования в любой фиксированный момент времени. При этом значение величины ZЭT1 определяет положение области значений тестовых величин.
Из полученного выражения также следует, что результат измерения не зависит от величины промежутка времени между тактами измерений, что позволяет выбрать его значение достаточно малым, чтобы обеспечить, с одной стороны, сокращение времени измерения, а с другой, чтобы удовлетворить требование линейности дрейфа аддитивной составляющей погрешности во времени.
Устройство для измерения сопротивлений по фиг.1, реализующее способ измерения сопротивлений с коррекцией дрейфа аддитивной погрешности, содержит входное устройство ВУ 1, снабженное аналоговым преобразователем АП 2, преобразователь измеряемого параметра в частоту переменного тока ППЧ 3, преобразователь частоты в цифровой код ПЧК 4 и микропроцессорный контроллер МПК 5, причем аналоговый преобразователь АП 2 выполнен в виде замкнутой цепи, образованной последовательным соединением измеряемого сопротивления Zx6, первого ZЭT1 7, второго ZЭT2 8, третьего ZЭT3 9 и четвертого ZЭT4 10 эталонных сопротивлений, причем точка соединения измеряемого Zx 6 и первого ZЭT1 7 сопротивлений соединена с первым входом преобразователя ППЧ 3, а точки соединения первого ZЭT1 7 и второго ZЭT2 8, второго ZЭT2 8 и третьего ZЭT3 9, третьего ZЭT3 9 и четвертого ZЭT4 10 эталонных сопротивлений через управляемые ключи КЛ1 11, КЛ2 12, КЛ3 13, КЛ4 14 соответственно подсоединены ко второму входу преобразователя ППЧ 3.
Устройство работает следующим образом.
В первом такте измерения микропроцессорный контроллер МПК 5 замыкает ключ КЛ1 11 и размыкает ключи КЛ2 12, КЛ3 13, КЛ4 14, подключая тем самым к входу преобразователя ППЧ 3 цепь, образованную параллельным соединением первого эталонного сопротивления ZЭT1 7 и цепи, образованной последовательным соединением измеряемого сопротивления Zх 6, второго ZЭT2 8, третьего ZЭT3 9 и четвертого ZЭT4 10 эталонных сопротивлений. Преобразователь ППЧ 3 преобразует формируемую при данной конфигурации цепи АП 2 величину  в частоту переменного тока, которая, в свою очередь, преобразуется в цифровой код преобразователем ПЧК 4. Результат первого измерения поступает в микропроцессорный контроллер 5, в котором фиксируется число N1, связанное с измеряемой величиной Zx 6 зависимостью где а0, b - параметры, характеризующие соответственно аддитивную и мультипликативную погрешности преобразования величины в код. Во втором такте, выполняемом через промежуток времени Δt после первого такта измерения, микропроцессорный контроллер МПК 5 размыкает ключ КЛ1 11 и замыкает ключ КЛ2 12, тем самым подключая к входу преобразователя ППЧ 3 цепь, образованную параллельным соединением двух ветвей, одна из которых состоит из последовательно соединенных первого ZЭT1 7 и второго ZЭT2 8 эталонных сопротивлений, а вторая - из последовательно соединенных измеряемого сопротивления Zx 6, третьего ZЭT3 9 и четвертого ZЭT4 10 эталонных сопротивлений. В результате второго измерения в микропроцессорном контроллере МПК 5 фиксируется число N2, связанное с измеряемой величиной ZX 6 зависимостью где a1 - параметр, характеризующий временной дрейф аддитивной составляющей погрешности преобразования. В третьем такте измерения, выполняемом через промежуток времени Δt после второго такта измерения, микропроцессорный контроллер 5 размыкает ключ КЛ2 12 и замыкает ключ КЛ3 13, тем самым подключая к входу преобразователя ППЧ 3 цепь, образованную параллельным соединением двух ветвей, одна из которых состоит из последовательно соединенных первого ZЭT17, второго ZЭT2 8 и третьего ZЭT3 9 эталонных сопротивлений, а вторая - из последовательно соединенных измеряемого сопротивления ZX 6 и четвертого ZЭT4 10 эталонного сопротивления. В результате третьего такта измерения в микропроцессорном контроллере МПК 5 фиксируется число N3, связанное с измеряемой величиной ZX зависимостью
в частоту переменного тока, которая, в свою очередь, преобразуется в цифровой код преобразователем ПЧК 4. Результат первого измерения поступает в микропроцессорный контроллер 5, в котором фиксируется число N1, связанное с измеряемой величиной Zx 6 зависимостью где а0, b - параметры, характеризующие соответственно аддитивную и мультипликативную погрешности преобразования величины в код. Во втором такте, выполняемом через промежуток времени Δt после первого такта измерения, микропроцессорный контроллер МПК 5 размыкает ключ КЛ1 11 и замыкает ключ КЛ2 12, тем самым подключая к входу преобразователя ППЧ 3 цепь, образованную параллельным соединением двух ветвей, одна из которых состоит из последовательно соединенных первого ZЭT1 7 и второго ZЭT2 8 эталонных сопротивлений, а вторая - из последовательно соединенных измеряемого сопротивления Zx 6, третьего ZЭT3 9 и четвертого ZЭT4 10 эталонных сопротивлений. В результате второго измерения в микропроцессорном контроллере МПК 5 фиксируется число N2, связанное с измеряемой величиной ZX 6 зависимостью где a1 - параметр, характеризующий временной дрейф аддитивной составляющей погрешности преобразования. В третьем такте измерения, выполняемом через промежуток времени Δt после второго такта измерения, микропроцессорный контроллер 5 размыкает ключ КЛ2 12 и замыкает ключ КЛ3 13, тем самым подключая к входу преобразователя ППЧ 3 цепь, образованную параллельным соединением двух ветвей, одна из которых состоит из последовательно соединенных первого ZЭT17, второго ZЭT2 8 и третьего ZЭT3 9 эталонных сопротивлений, а вторая - из последовательно соединенных измеряемого сопротивления ZX 6 и четвертого ZЭT4 10 эталонного сопротивления. В результате третьего такта измерения в микропроцессорном контроллере МПК 5 фиксируется число N3, связанное с измеряемой величиной ZX зависимостью
В четвертом такте, выполняемом через промежуток времени Δt после третьего такта измерения, микропроцессорный контроллер 5 размыкает ключ КЛ3 13 и замыкает ключ КЛ4 14, тем самым подключая к входу преобразователя ППЧ 3 цепь, образованную параллельным соединением двух ветвей, одна из которых состоит из последовательно соединенных первого ZЭT1 7, второго ZЭT2 8, третьего ZЭT3 9 и четвертого ZЭT4 10 эталонных сопротивлений, а вторая - из измеряемого сопротивления ZX 6. В результате четвертого такта измерения в микропроцессорном контроллере МПК 5 фиксируется число N4, связанное с измеряемой величиной ZX зависимостью
В соответствии с предлагаемым способом результаты четырех измерений рассматриваются как совместная система уравнений, в которой в качестве неизвестных выступают значение измеряемой величины ZX и параметры a1, a0, b. Измеряемая величина определяется в микропроцессорном контроллере МПК 5 по формуле
Значения всех коэффициентов формулы, используемой при определении измеряемой величины, задаются при изготовлении и настройке устройства. Условием реализуемости и эффективности способа является неравенство значений эталонных сопротивлений ZЭT2, ZЭT3 и ZЭT4. Предложенная в примере конфигурация измерительной цепи позволяет путем выбора значения эталонного сопротивления ZЭT1 регулировать размещение области значений величин, измеряемых в четырех тактах преобразования, а значения сопротивлений или индуктивностей ZЭT2, ZЭT3 и ZЭT4, много меньшие значения сопротивления ZЭT1, позволяют регулировать размер области изменения сопротивлений, подключаемых на вход ППЧ3.
Устройство для измерения сопротивлений по фиг.2, реализующее способ измерения сопротивлений с коррекцией дрейфа аддитивной и мультипликативной погрешностей, содержит входное устройство ВУ 15, снабженное аналоговым преобразователем АП 16, преобразователь измеряемого параметра в частоту переменного тока ППЧ 17, преобразователь частоты в цифровой код ПЧК 18 и микропроцессорный контроллер МПК 19, причем аналоговый преобразователь АП 16 выполнен в виде замкнутой цепи, образованной последовательным соединением измеряемого сопротивления Zx 20, первого ZЭТ1 21, второго ZЭТ2 22, третьего ZЭТ3 23, четвертого ZЭТ4 24 и пятого ZЭТ5 25 эталонных сопротивлений, причем точка соединения измеряемого Zx 20 и первого ZЭТ1 21 сопротивлений соединена с первым входом преобразователя ППЧ 3, а точки соединения первого ZЭТ1 21 и второго ZЭТ2 22, второго ZЭТ2 22 и третьего ZЭТ3 23, третьего ZЭТ3 23 и четвертого ZЭТ4 24, четвертого ZЭТ4 24 и пятого ZЭТ5 25 эталонных сопротивлений через управляемые ключи КЛ1 26, КЛ2 21, КЛ3 28, КЛ4 29, КЛ5 30 соответственно подсоединены ко второму входу преобразователя ППЧ 17.
Устройство работает следующим образом.
В первом такте измерения микропроцессорный контроллер МПК 19 замыкает ключ КЛ1 26 и размыкает ключи КЛ2 27, КЛ3 28, КЛ4 29, КЛ5 30, подключая тем самым к входу преобразователя ППЧ 17 цепь, образованную параллельным соединением первого эталонного сопротивления ZЭТ1 21 и цепи, образованной последовательным соединением измеряемого сопротивления ZX 20, второго ZЭТ2 22, третьего ZЭТ3 23, четвертого ZЭТ4 24 и пятого ZЭТ5 25 эталонных сопротивлений. Преобразователь ППЧ 17 преобразует формируемую при данной конфигурации цепи АП 16 величину  в частоту переменного тока, которая, в свою очередь, преобразуется в цифровой код преобразователем ПЧК 18. Результат первого измерения поступает в микропроцессорный контроллер МПК 19, в котором фиксируется число, связанное с измеряемой величиной Zx 20 зависимостью
в частоту переменного тока, которая, в свою очередь, преобразуется в цифровой код преобразователем ПЧК 18. Результат первого измерения поступает в микропроцессорный контроллер МПК 19, в котором фиксируется число, связанное с измеряемой величиной Zx 20 зависимостью  где а0, а1, b0, b1 - параметры, характеризующие аддитивную и мультипликативную погрешности преобразования величины в код. Во втором такте, выполняемом через промежуток времени Δt после первого такта измерения, микропроцессорный контроллер МПК 19 размыкает ключ КЛ1 26 и замыкает ключ КЛ2 27, тем самым подключая к входу преобразователя ППЧ 17 цепь, образованную параллельным соединением двух ветвей, одна из которых состоит из последовательно соединенных первого ZЭT1 21 и второго ZЭT2 22 эталонных сопротивлений, а вторая - из последовательно соединенных измеряемого сопротивления ZX 20, третьего ZЭT3 23, четвертого ZЭT4 24 и пятого ZЭT5 25 эталонных сопротивлений. В результате второго измерения в микропроцессорном контроллере МПК 19 фиксируется число N2, связанное с измеряемой величиной ZX 20 зависимостью
где а0, а1, b0, b1 - параметры, характеризующие аддитивную и мультипликативную погрешности преобразования величины в код. Во втором такте, выполняемом через промежуток времени Δt после первого такта измерения, микропроцессорный контроллер МПК 19 размыкает ключ КЛ1 26 и замыкает ключ КЛ2 27, тем самым подключая к входу преобразователя ППЧ 17 цепь, образованную параллельным соединением двух ветвей, одна из которых состоит из последовательно соединенных первого ZЭT1 21 и второго ZЭT2 22 эталонных сопротивлений, а вторая - из последовательно соединенных измеряемого сопротивления ZX 20, третьего ZЭT3 23, четвертого ZЭT4 24 и пятого ZЭT5 25 эталонных сопротивлений. В результате второго измерения в микропроцессорном контроллере МПК 19 фиксируется число N2, связанное с измеряемой величиной ZX 20 зависимостью  где a1 - параметр, характеризующий временной дрейф аддитивной составляющей погрешности преобразования. В третьем такте измерения, также выполняемом через фиксированный промежуток времени Δt после второго такта измерения, микропроцессорный контроллер МПК 19 размыкает ключ КЛ2 27 и замыкает ключ КЛ3 28, тем самым подключая к входу преобразователя ППЧ 17 цепь, образованную параллельным соединением двух ветвей, одна из которых состоит из последовательно соединенных первого ZЭT1 21, второго ZЭT2 22 и третьего ZЭT3 23 эталонных сопротивлений, а вторая - из последовательно соединенных измеряемого сопротивления ZX 20, четвертого ZЭT4 24 и пятого ZЭT5 25 эталонных сопротивлений. В результате третьего такта измерения в микропроцессорном контроллере МПК 19 фиксируется число N3, связанное с измеряемой величиной ZX зависимостью
где a1 - параметр, характеризующий временной дрейф аддитивной составляющей погрешности преобразования. В третьем такте измерения, также выполняемом через фиксированный промежуток времени Δt после второго такта измерения, микропроцессорный контроллер МПК 19 размыкает ключ КЛ2 27 и замыкает ключ КЛ3 28, тем самым подключая к входу преобразователя ППЧ 17 цепь, образованную параллельным соединением двух ветвей, одна из которых состоит из последовательно соединенных первого ZЭT1 21, второго ZЭT2 22 и третьего ZЭT3 23 эталонных сопротивлений, а вторая - из последовательно соединенных измеряемого сопротивления ZX 20, четвертого ZЭT4 24 и пятого ZЭT5 25 эталонных сопротивлений. В результате третьего такта измерения в микропроцессорном контроллере МПК 19 фиксируется число N3, связанное с измеряемой величиной ZX зависимостью  В четвертом такте измерения, выполняемом через промежуток времени Δt после третьего такта измерения, микропроцессорный контроллер МПК 19 размыкает ключ КЛ3 28 и замыкает ключ КЛ4 29, тем самым подключая к входу преобразователя ППЧ 17 цепь, образованную параллельным соединением двух ветвей, одна из которых состоит из последовательно соединенных первого ZЭT1 21, второго ZЭT2 22, третьего ZЭT3 23 и четвертого ZЭT4 10 эталонных сопротивлений, а вторая - из последовательно соединенных измеряемого Zx 20 и пятого ZЭT5 25 эталонного сопротивлений. В результате четвертого такта измерения в микропроцессорном контроллере МПК 19 фиксируется число N4, связанное с измеряемой величиной ZX зависимостью
В четвертом такте измерения, выполняемом через промежуток времени Δt после третьего такта измерения, микропроцессорный контроллер МПК 19 размыкает ключ КЛ3 28 и замыкает ключ КЛ4 29, тем самым подключая к входу преобразователя ППЧ 17 цепь, образованную параллельным соединением двух ветвей, одна из которых состоит из последовательно соединенных первого ZЭT1 21, второго ZЭT2 22, третьего ZЭT3 23 и четвертого ZЭT4 10 эталонных сопротивлений, а вторая - из последовательно соединенных измеряемого Zx 20 и пятого ZЭT5 25 эталонного сопротивлений. В результате четвертого такта измерения в микропроцессорном контроллере МПК 19 фиксируется число N4, связанное с измеряемой величиной ZX зависимостью  В пятом такте измерения, выполняемом через промежуток времени Δt после четвертого такта измерения, микропроцессорный контроллер МПК 19 размыкает ключ КЛ4 29 и замыкает ключ КЛ5 30, тем самым подключая к входу преобразователя ППЧ 17 цепь, образованную параллельным соединением двух ветвей, одна из которых состоит из последовательно соединенных первого ZЭT1 21, второго ZЭT2 22, третьего ZЭT3 23, четвертого ZЭT4 10 и пятого ZЭT5 25 эталонных сопротивлений, а вторая - из измеряемого сопротивления Zx 20. В результате пятого такта измерения в микропроцессорном контроллере МПК 19 фиксируется число N5, связанное с измеряемой величиной ZX зависимостью
В пятом такте измерения, выполняемом через промежуток времени Δt после четвертого такта измерения, микропроцессорный контроллер МПК 19 размыкает ключ КЛ4 29 и замыкает ключ КЛ5 30, тем самым подключая к входу преобразователя ППЧ 17 цепь, образованную параллельным соединением двух ветвей, одна из которых состоит из последовательно соединенных первого ZЭT1 21, второго ZЭT2 22, третьего ZЭT3 23, четвертого ZЭT4 10 и пятого ZЭT5 25 эталонных сопротивлений, а вторая - из измеряемого сопротивления Zx 20. В результате пятого такта измерения в микропроцессорном контроллере МПК 19 фиксируется число N5, связанное с измеряемой величиной ZX зависимостью  В соответствии с предлагаемым способом результаты пяти измерений рассматриваются как совместная система уравнений, в которой в качестве неизвестных выступают значение измеряемой величины ZX и параметры b0, b1, a0, a1. Измеряемая величина определяется в микропроцессорном контроллере МПК 19 по формуле
В соответствии с предлагаемым способом результаты пяти измерений рассматриваются как совместная система уравнений, в которой в качестве неизвестных выступают значение измеряемой величины ZX и параметры b0, b1, a0, a1. Измеряемая величина определяется в микропроцессорном контроллере МПК 19 по формуле
Значения всех коэффициентов формулы, используемой при определении измеряемой величины, задаются при изготовлении и настройке устройства. Условием реализуемости и эффективности использования способа является неравенство значений эталонных сопротивлений или индуктивностей ZЭT2, ZЭT3, ZЭT4 и ZЭT5. Предложенная в примере конфигурация измерительной цепи позволяет путем выбора значения эталонного сопротивления или индуктивности ZЭT1 регулировать размещение области значений величин, измеряемых в четырех тактах преобразования, а значения сопротивлений или индуктивностей ZЭT2, ZЭT3, ZЭT4 и ZЭT5, много меньшие значения сопротивления ZЭT1, позволяют регулировать размер области изменения сопротивлений, подключаемых на вход ППЧ 17.
В свою очередь, регулировка величины диапазона изменения тестовых значений позволяет обеспечить высокую степень линейности градуировочной характеристики в диапазоне изменения тестовых величин и за счет этого повысить точность измерения.
Предлагаемые способы объединены единым изобретательским замыслом, основанным на общем принципе выполнения последовательности измерений и общем принципе расчета значения измеряемой величины.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ СОПРОТИВЛЕНИЙ, ИНДУКТИВНОСТЕЙ И ЕМКОСТЕЙ И УСТРОЙСТВА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2395099C1 |
| ТЕНЗОМЕТРИЧЕСКОЕ МАССОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ГРУЗОВ (ВАРИАНТЫ) | 2009 |
|
RU2411463C2 |
| СПОСОБ ИЗМЕРЕНИЯ СОПРОТИВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2395098C1 |
| Тензометрическое устройство | 1990 |
|
SU1781565A1 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ МНОГОЭЛЕМЕНТНЫХ ДВУХПОЛЮСНИКОВ | 2009 |
|
RU2391675C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ СОСТОЯНИЯ ТВЕРДЫХ ТКАНЕЙ ЗУБОВ БИООБЪЕКТОВ | 2005 |
|
RU2330608C2 |
| Цифровой измеритель температуры | 1982 |
|
SU1120180A1 |
| ИЗМЕРИТЕЛЬ ПАРАМЕТРОВ МНОГОЭЛЕМЕНТНЫХ ПАССИВНЫХ ДВУХПОЛЮСНИКОВ | 2009 |
|
RU2390787C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МНОГОЭЛЕМЕНТНЫХ ДВУХПОЛЮСНИКОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2434234C1 |
| Устройство для измерения температуры | 1990 |
|
SU1732186A1 |
Изобретение относится к области измерительной техники. Последовательно осуществляют четыре такта измерения частоты колебаний, причем в первом такте формируют измеряемую величину  . Во втором такте, выполняемом через фиксированный промежуток времени после начала первого такта, формируют измеряемую величину
. Во втором такте, выполняемом через фиксированный промежуток времени после начала первого такта, формируют измеряемую величину  . В третьем такте формируют измеряемую величину
. В третьем такте формируют измеряемую величину  . В четвертом такте формируют измеряемую величину
. В четвертом такте формируют измеряемую величину  а искомое значение измеряемого пассивного электрического элемента определяют по формуле
а искомое значение измеряемого пассивного электрического элемента определяют по формуле 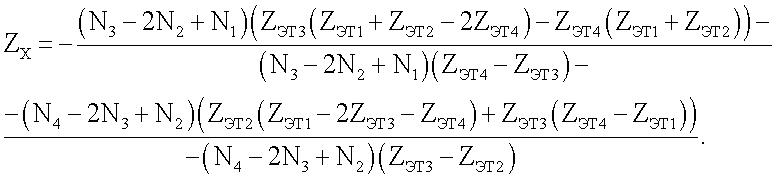 Технический результат заключается в повышении точности измерения. 2 н.п. ф-лы, 2 ил.
Технический результат заключается в повышении точности измерения. 2 н.п. ф-лы, 2 ил.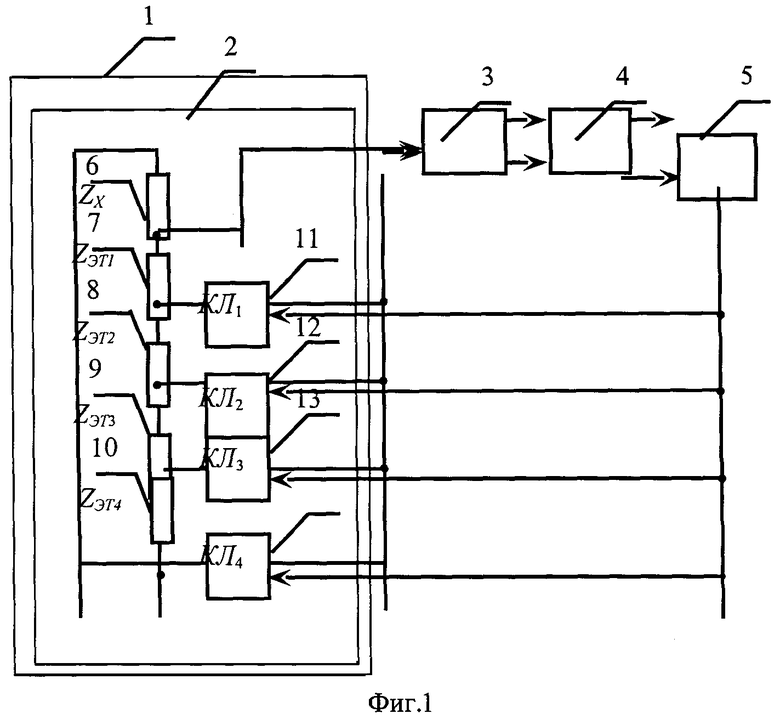
1. Способ измерения сопротивления, индуктивности и емкости, характеризующийся тем, что для коррекции временного дрейфа аддитивной составляющей погрешности последовательно осуществляют четыре такта измерения частоты колебаний, зависящего от значения измеряемого пассивного электрического элемента, при различной конфигурации частотно-зависимой цепи, причем в первом такте формируют измеряемую величину 
где  - соответственно измеряемый пассивный электрический элемент, первый, второй третий и четвертый эталонные пассивные электрические элементы, однородные с измеряемым электрическим элементом, во втором такте, выполняемом через фиксированный промежуток времени после начала первого такта, формируют измеряемую величину
- соответственно измеряемый пассивный электрический элемент, первый, второй третий и четвертый эталонные пассивные электрические элементы, однородные с измеряемым электрическим элементом, во втором такте, выполняемом через фиксированный промежуток времени после начала первого такта, формируют измеряемую величину  в третьем такте преобразования, выполняемом через фиксированный промежуток времени после начала второго такта, формируют измеряемую величину
в третьем такте преобразования, выполняемом через фиксированный промежуток времени после начала второго такта, формируют измеряемую величину  в четвертом такте преобразования, выполняемом через фиксированный промежуток времени после начала третьего такта, формируют измеряемую величину
в четвертом такте преобразования, выполняемом через фиксированный промежуток времени после начала третьего такта, формируют измеряемую величину  а искомое значение измеряемого пассивного электрического элемента определяют по формуле
а искомое значение измеряемого пассивного электрического элемента определяют по формуле 
где N1, N2, N3, N4 - результаты первого второго, третьего и четвертого тактов преобразования соответственно.
2. Способ измерения сопротивления, индуктивности и емкости, характеризующийся тем, что для коррекции временного дрейфа аддитивной и мультипликативной составляющих погрешности последовательно осуществляют пять тактов измерения частоты колебаний, зависящего от значения измеряемого пассивного электрического элемента, при различной конфигурации частотно-зависимой цепи, причем в первом такте формируют измеряемую величину 
где ZX, ZЭT1, ZЭT2, ZЭT3, ZЭT4, ZЭT5 - соответственно измеряемый пассивный электрический элемент, первый, второй третий, четвертый и пятый эталонные пассивные электрические элементы, однородные с измеряемым электрическим элементом, во втором такте преобразования, выполняемом через фиксированный промежуток времени после начала первого такта, формируют измеряемую величину  в третьем такте преобразования, выполняемом через фиксированный промежуток времени после начала второго такта, формируют измеряемую величину
в третьем такте преобразования, выполняемом через фиксированный промежуток времени после начала второго такта, формируют измеряемую величину  в четвертом такте преобразования, выполняемом через фиксированный промежуток времени после начала третьего такта, формируют измеряемую величину
в четвертом такте преобразования, выполняемом через фиксированный промежуток времени после начала третьего такта, формируют измеряемую величину  в пятом такте преобразования, выполняемом через фиксированный промежуток времени после начала четвертого такта, формируют измеряемую величину
в пятом такте преобразования, выполняемом через фиксированный промежуток времени после начала четвертого такта, формируют измеряемую величину  а искомое значение измеряемого пассивного электрического элемента определяют по формуле
а искомое значение измеряемого пассивного электрического элемента определяют по формуле
где 



а N1, N2, N3, N4, N5 - результаты первого второго, третьего, четвертого и пятого тактов преобразования соответственно.
| Бромберг Э.М., Куликовский К.Л | |||
| Тестовые методы повышения точности измерений | |||
| - М.: Энергия, 1978, 137 с | |||
| Передвижное устройство для выгрузки сыпучих грузов, в частности, семян хлопчатника, из железнодорожных вагонов | 1952 |
|
SU95839A1 |
| УСТРОЙСТВО КОНТРОЛЯ АККУМУЛЯТОРНЫХ БАТАРЕЙ | 2020 |
|
RU2741741C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЭЛЕКТРИЧЕСКОЙ ЕМКОСТИ И ИНДУКТИВНОСТИ | 1992 |
|
RU2008690C1 |

