Изобретение относится к геофизическим исследованиям и работам в скважинах, бурящихся на нефть и газ.
Известен способ геонавигации горизонтальных скважин [1, 2], заключающийся в проведении высокочастотного индукционного каротажного изопараметрического зондирования (ВИКИЗ). Данный способ получил широкое распространение в геофизических исследованиях нефтегазовых скважин и может использоваться для геонавигации горизонтальных скважин в продуктивных пластах большой мощности.
В продуктивных же пластах малой мощности (2-3 м) и с интенсивно изменяющейся формой залегания способ ВИКИЗ будет неэффективен по следующим причинам:
1) используемые зонды индукционного каротажа сложную по морфологии среду околоскважинного пространства отражают как однородную изотропную среду. В реальной обстановке, в необходимом радиусе исследований (до 1-2 метров) в условиях маломощных субгоризонтальных пластов, морфология зон различного сопротивления имеет анизотропный характер;
2) способ ВИКИЗ не оперативен, т.к. для принятия решения о траектории проводки ствола скважин извлекается буровой инструмент, затем на забой доставляется геофизическая аппаратура и выполняется каротаж. После оперативной интерпретации данных выполненного каротажа определяется стратегия дальнейшего бурения. Достаточно точное управление процессом бурения горизонтального ствола в пластах коллекторов малой мощности возможно только пои детальном анализе данной морфологии в системе on-line.
Более эффективным является каротаж в процессе бурения, в системах которых используются индукционные зонды различных модификаций [3, 4]. Такие системы каротажа в процессе бурения существуют и за рубежом: Logging Well Drilling или LWD-системы (Schlumberger, Baker Atlas и др.) [5, 6]. Однако и эти системы имеют недостатки, а именно:
- применяемые системы оснащены индукционными зондами, которые не имеют геометрической и электродинамической изопараметричности, что не дает возможность достоверно изучать процесс насыщения пластов при образовании скопления пластовой воды вокруг скважины;
- устройства каротажа конструктивно размещаются на значительном расстоянии от долота и его двигателей (более 10 м), что дает существенно запаздывающую информацию о породах и не позволяет учесть техногенные изменения, обусловленные процессами фильтрации бурового раствора в пласт;
- известно, что проникновение фильтратов бурового раствора в коллекторы вытесняет не только углеводороды, но и пластовую воду. Пластовая вода, вытесненная вслед за нефтью, образует окаймляющую зону повышенной электропроводности [2, 5, 6]. Модели среды с такими техногенными неоднородностями включают скважину, зону проникновения фильтрата с двумя границами раздела. Границами разделяют пространство около скважины на три зоны с неизвестными абсолютными электрическими свойствами, что чрезвычайно осложняет интерпретацию данных ИК. Таким образом, отметим, что оперативный анализ возможен в первом приближении только по относительным значениям электропроводности зон среды N примерно по схеме: высокая, низкая, высокая, низкая от оси скважины.
Таким образом, системы LWD, применяемые в Schlumberger и др. западных компаниях, не гарантируют необходимой точности определения положения оси ствола скважины, а также и характера насыщения пород из-за сложности структуры в околоскважинном пространстве, вызванной техногенными процессами.
Известны способы и многочисленные устройства бокового (электрического) каротажного зондирования (БКЗ) [7-12] для исследования электрических свойств литологических разностей вблизи ствола скважины. Однако эти способы и устройства не имеют достаточной разрешающей способности к геоэлектрическим свойствам пород, простирающихся вдоль ствола горизонтальной скважины. Кроме того, они в большой степени зависят от сложных экранных эффектов, обусловленных уплотненными слоями, что существенно усложняет интерпретацию результатов измерения. Не менее важным является фактор повышенной проводимости скважинного флюида, что приводит к повышенной концентрации тока по раствору и резкому снижению тока, проникающего в породы. В условиях бурения на соленых растворах, когда удельное сопротивление скважинного флюида составляет доли Ом·м, а сопротивление вмещающих пород N более 100 Ом·м, в среду попадает менее 1% тока, что существенно снижает эффективность методов БК. Существуют также технологические трудности доставки на забой горизонтальных скважин зондовых устройств БКЗ шлангового типа.
Известен способ оснащения бурового инструмента системами каротажа, который выполняется в процессе бурения ВИКПБ-7 [15]. Данная технология основана на выполнении высокочастотных электромагнитных зондирований семью индукционными зондами разной глубинности. Диапазон измерения сопротивления 1-200 Ом·м. Технология проведения исследований ВИКПБ-7 кроме конструктивных особенностей мало отличается от технологии ВИКИЗ [1, 2] и ей присущи те же недостатки, описанные выше. Оборудование также основано на применении различных зондов индукционного каротажа, что позволяет судить количественно о сопротивлении пород в радиусе от 0.3 до 2.0 м. Однако есть ограничение, что отмечается авторами разработки [2], радиусы исследований до центра откликов зависят от удельных сопротивлений среды. Низкое сопротивление среды уменьшает глубинность исследования.
Целью предлагаемого изобретения является повышение эффективности геонавигации горизонтальных скважин в пластах коллекторов малой мощности за счет регистрации изменений параметров пород в процессе бурения одновременно по трем ортогональным направлениям, что дает возможность принятия решения об изменении траектории бурения в режиме on-line.
Это достигается тем, что способ геонавигации горизонтальных скважин основан на возбуждении импульсного электромагнитного поля и измерении магнитных полей вихревых токов в породах.
Отличительной особенностью предлагаемого способа является то, что возбуждение электромагнитного поля проводят с помощью электрического диполя, питаемого импульсным разнополярным током, а измерения магнитных полей вихревых токов проводят в период паузы между импульсами тока малогабаритными индуктивными датчиками, ориентированными в трех ортогональных направлениях, и по анализу кривых спада магнитных полей вихревых токов формируют команды на управление положением отклонителя бурильного инструмента. При этом с помощью индуктивных датчиков измеряют не менее трех кривых спада магнитных полей вихревого тока.
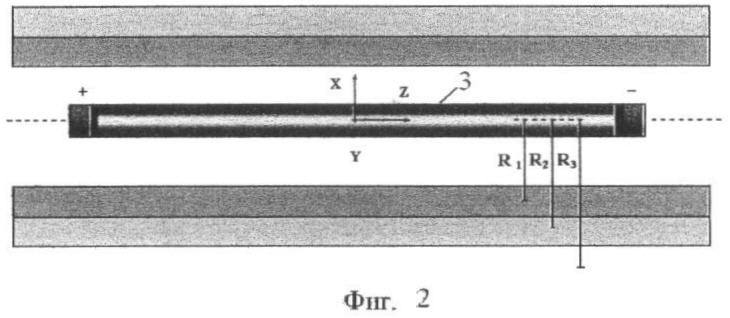
Данный способ реализуется устройством, содержащим долото, забойный двигатель с ориентатором и отклонителем, измерительный модуль, связанный с наземным приемно-обрабатывающим комплексом.
Отличие предлагаемого устройства для геонавигации горизонтальных скважин от других аналогичных устройств заключается в том, что измерительный модуль выполнен в виде немагнитной высокопрочной трубы с расположенными на концах питающими электродами, жестко соединенной с бурильными трубами и представляющей собой электрический диполь, питаемый импульсным разнополярным током, при этом измерительный модуль содержит малогабаритные индуктивные датчики для измерения магнитных полей вихревых токов, при этом индуктивные датчики расположены в теле трубы, а их магнитные моменты сориентированы в трех ортогональных направлениях.
На фиг.1 изображен общий вид устройства;
на фиг.2 представлена конструкция измерительного модуля;
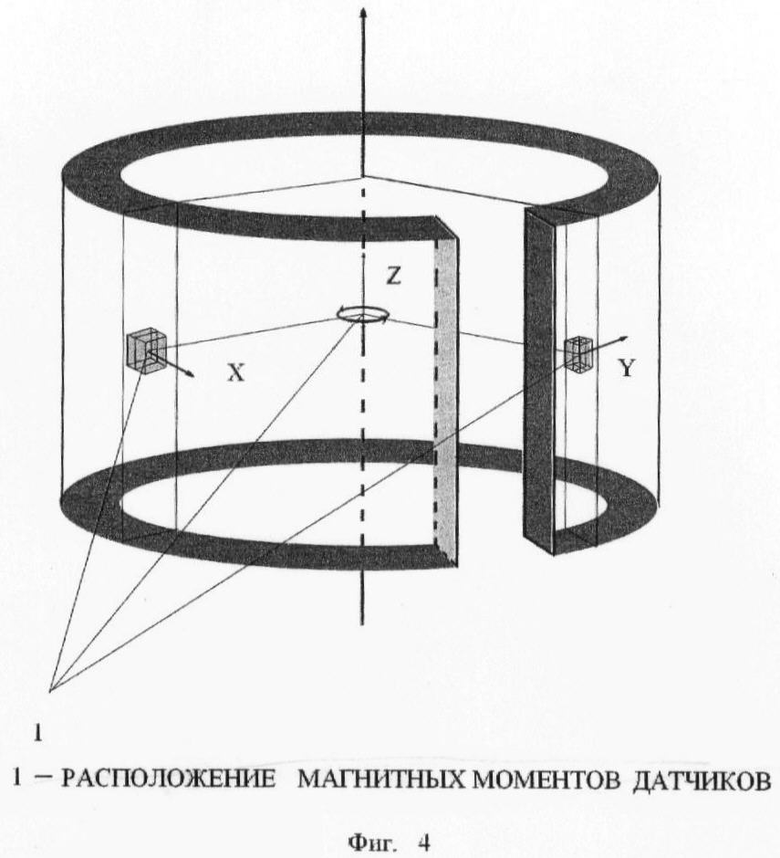
на фиг.3 отражены физические основы работы модуля;
на фиг.4 показано расположение индуктивных датчиков в теле трубы.
Устройство геонавигации горизонтальных скважин содержит долото 1, забойный двигатель 2 с ориентатором и отклонителем, измерительный модуль 3, связанный с помощью блок-системы 4 с наземным программно-обрабатывающим комплексом 5 (см. фиг.1).
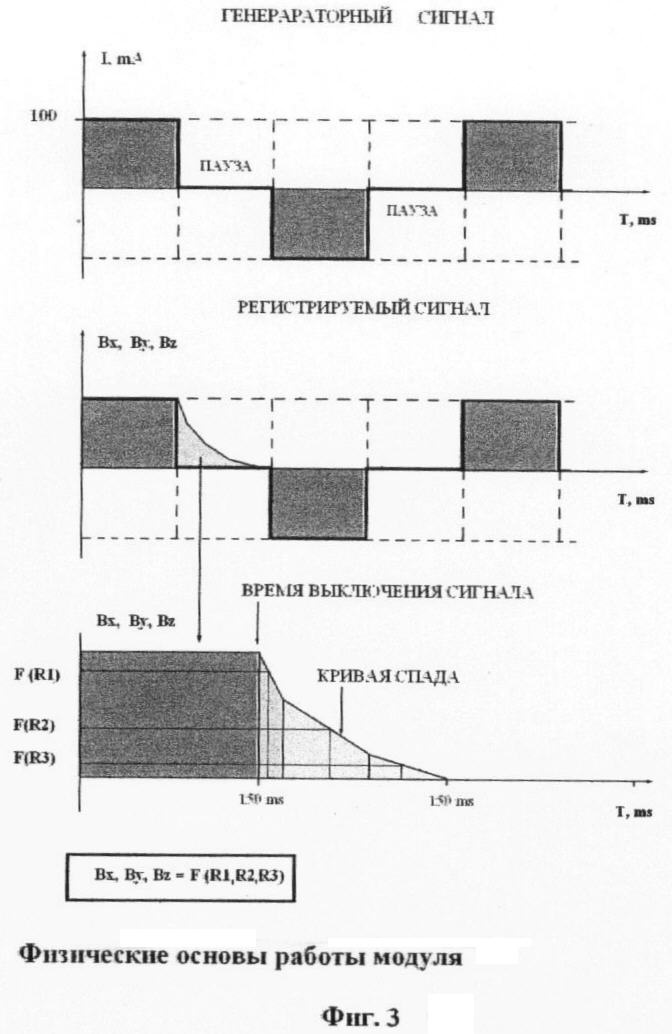
Измерительный модуль 3 (см. фиг.1 и 2) выполнен в виде немагнитной высокопрочной трубы с расположенными на концах питающими электродами и представляющей собой электрический диполь, питаемый импульсным разнополярным током. Измерительный модуль 3 жестко соединен с блоком телесистемы 4 и бурильными трубами и представляет собой комплексную дипольную систему, позволяющую проводить измерения кажущегося сопротивления в трехмерном пространстве вблизи ствола скважины.
Измерительный модуль 3 выполнен из немагнитного высокопрочного материала (несущая труба длиной до 5 м), что делает его радиопрозрачным для магнитных полей вихревых токов в среде и одновременно чрезвычайно прочным для вибрации и осевых ударных нагрузок при проведении процесса бурения. Внутренний диаметр трубы выполнен полым для пропуска бурового раствора.
Малогабаритные индуктивные датчики X, Y и Z, магнитные моменты которых ориентированы в трех ортогональных направлениях (см. фиг.4), и все платы с электроникой размещаются в теле несущей трубы в герметичных специализированных контейнерах.
Принцип работы
Возбуждение N гальваническое. Основной источник N диполь А(+) NB(-). Форма тока - знакопеременная с паузами, длительность импульса и паузы N 150 ms. Сила тока в импульсе 100 mA. Токовая цепь замыкается через буровой раствор и среду.
Прием N индуктивный. Индуктивные датчики X, Y, Z размещены в теле несущей немагнитной трубы.
При индуктивном возбуждении в случае применения электрического диполя существуют всего четыре основных источника магнитного поля (для индуктивных датчиков X, Y, Z):
1) первичный омический ток от одного электроду к другому;
2) ток поляризации внутри поляризуемого тела (если оно есть);
3) ток в силовом кабеле;
4) вихревой ток, возникающий в породе под действием первичного магнитного поля силового кабеля.
Из этих источников интерес представляет только вихревой ток, возникающий в породе под воздействием первичного магнитного поля силового кабеля.
Измерения магнитных полей вихревых токов проводят в период паузы между импульсами (см. фиг.3), когда влияние этих магнитных полей омического тока и тока в силовом кабеле исчезающе мало.
Аналогично в отношении с магнитным током поляризации - поляризуемое тело отсутствует. Поляризация нефти в порах коллектора не превышает 0.5%.
Единственный источник поля в период паузы - магнитное поле вихревых токов, возбуждаемых в породах окружающей среды.
На времени задержки 0.001 с (1 mS) поле от породы с сопротивлением 100 Ом·м составляет около 3 нТл на расстоянии 0.05 м. На времени t=0.1 секунды (100 ms) N уже 0.3 нТл, на расстоянии 1 метр и времени 1 ms N 1.6 нТл.
В теле несущей трубы размещаются три приемных индуктивных датчика (фиг.3).
В качестве зондов используются три приемных индуктивных датчика N кроме датчика Z, ориентированного по оси скважины, еще размещаются датчики Х и Y по ортогональным направлениям. В качестве индуктивных датчиков используются известные преобразователи магнитной индукции, разработанные в ИГ УрО РАН и представляющие собой симметричные мультивибраторы с насыщающимися сердечниками. Сердечник из аморфного сплава, кольцевой с двумя симметричными катушками. Напряжение питания 5.5 В (стабилизированное, однополярное). Частота мультивибратора 0.5 N 5 МГц. Коэффициент преобразования от 0.1 до 1 мкВ/нТл. Размер зонда 1-2 см3. Чувствительность приемника - 0.1 нТл. Все измерения кривой спада электромагнитного поля вихревых токов заканчиваются до 120 mS.
Тем самым, получена ортогонально-ориентированная система при условии привязки к гироскопическим данным телеметрической системы всего управляемого бурильного комплекса с применением бурового раствора любой минерализации.
Скорость и морфология кривой спада магнитного поля вихревых токов после выключения генераторного импульса зависит от силы вихревых токов в ближней (R1), средней (R2) и дальней (R3) зонах окружающей среды, т.е. фактически N от морфологии спектра кажущегося сопротивления литологических разностей.
Значение индукции (В) регистрируемого вторичного магнитного поля вихревого тока в той или иной литологической разности определяется силой этого тока, зависящего от кажущегося сопротивления (КС) конкретного литотипа, расположенного на расстоянии R (см. фиг.2). Определение значений КС по значениям регистрируемой магнитной индукции на конкретных временах спада сигнала сделано на основе принципов, изложенных в [16].
Магнитное поле вихревых токов, возбуждаемых в породах, расположенных непосредственно от ствола, достигает датчиков на самых ранних временах регистрации (до 30-40 ms) N R1. Сигнал от более удаленных зон, сформированных в процессе осадконакопления и при изменении пласта в процессе бурения, поступает на датчики на относительно средних временах (от 50 до 85 ms) - R2. Наиболее дальние литологические разности от оси консолидируют вихревые токи, магнитное поле которых достигает приемных датчиков в период от 90 до 130 ms N R3. Границы неизмененных, как правило, более плотных пород, вмещающих пласты нефтяной флюид, характеризуются существенно более контрастными изменениями электрического сопротивления [2].
Непосредственно зондирование по глубине среды осуществляется при системном анализе кривых спада магнитного поля вихревых токов каждого приемного индуктивного датчика на ранних (ближняя зона) и поздних (дальняя зона) временах регистрации (см. фиг.2 и 3).
При этом достигаются фактически глубины областей измеряемых сопротивлений до 1.0-1.4 метра (в зависимости от удельного сопротивления зоны проникновения) от оси скважины, что фактически позволило осуществлять управляемую проводку в нефтяных пластах всего от 2 до 3 метров.
Точка привязки полученной информации находится в 6 метрах от бурильного долота, что в значительной степени повышает оперативность подачи команд на управление отклонителя винтового забойного двигателя системы.
Система управления заключается в следующем. В процессе бурения горизонтального ствола в том случае, если ось скважины идет параллельно границам пласта, изменения в регистрируемых кривых спада по всем трем датчикам отсутствуют. В том случае, если ось скважины начинает приближаться к одной из границ пласта с вмещающими породами на расстояние ближе 1 метра, произойдет изменение уровня сигнала магнитного поля вихревого тока в различной степени по каждой ортогональной составляющей.
К примеру, при приближении центра расположения приемных индуктивных датчиков (модуля 3) к кровле пласта-коллектора в том случае, если породы кровли сложены из глин, произойдет изменение кажущегося сопротивления (КС). Данное изменение произойдет на фоне проработки ближней зоны пласта скважинным флюидом. Проработка в значительной степени зависит от анизотропии перового или трещинного пространства, но для данной задачи это носит интегральный характер. Градиент изменения будет возрастать по мере приближения к кровле пласта (или подошве), а его знак будет зависеть от того, какой именно водой (пресной или минерализованной) насыщены породы, слагающие кровлю.
Это изменение, начиная с 10% (к примеру, если нефтесодержащие породы N 100 Ом·м, а глины N более 200 Ом·м), становится основой формирования команды микропроцессору с учетом данных гироскопической привязки ведущей телесистемы (4) для следующего формирования последующей команды через наземный управляющий комплекс на отклонитель забойного двигателя (2), который начинает отклонение оси долота (1) начиная с 1°.
Процесс изменения кажущегося электрического сопротивления в различной степени отражается на разноориентированных индуктивных датчиках. В частности, в том случае, если процесс изменения КС отражается только на одной из составляющих (к примеру, X) и практически не сказывается на других компонентах, то оператор делает вывод о критическом приближении границы со стороны направления X.
Таким образом предлагаемый способ геонавигации и устройство для его реализации позволят качественно и оперативно (в режиме on-line) проводить проводку горизонтальных скважин в пластах малой мощности, а также в непосредственной близости от кровли нефтяного или нефтегазового коллектора.
Использованная литература
1. Пат. РФ 2230343, МПК G01V 3/26. Способ геонавигации горизонтальных скважин / Ю.Н.Антонов, М.И.Эпов, Н.К.Глебов и др; заявит. и патентооблад. ОАО «Сургутнефтегаз».- заявл. 24.08.01, опубл. 10.6.04, бюл. №16.
2. Антонов Ю.Н., Эпов М.И. ВИКИЗ в вертикальных и горизонтальных скважинах. // НТВ «Каротажник». Тверь: Изд. АИС. 2005. Вып.1 (128). С.69-89.
3. Патент РФ 2278236, МПК Е21В 47/022. Устройство для проводки наклонно направленных и горизонтальных скважин / В.П.Чупров, Р.А.Шайхутдинов, А.В.Бельков, Ю.С.Мишин; заявит и патентовладелец ОАО НПП ВНИИГИС. - заявл. 11.11.04, опубл. 20.06.06, бюл. №17.
4. Навигационно-технологическая компьютеризированная система (НКТС) «ВОЛНА» для контроля за проводкой наклонно направленных и горизонтальных скважин. НТВ «Каротажник» №94, С.93-95.
5. Betts P. and others. Acquiring and interpreting Logs in Horizontal Wells. Oilfield Review, vol.2, №3. 07.1990.
6. Боковой каротаж HDLL с высокой степенью определения: Каталог / фирмы Baker Atlas (США), 2006. - №1667. N С.1.
7. Комаров С.Г. К вопросу оценки коллекторских свойств пластов по результатам геофизических исследований скважин. Прикладная геофизика. Вып.6. - М.: Гостоптехиздат, 1963, с.195-213.
8. Итенберг С.С. Интерпретация результатов геофизических исследований скважин. - М.: Недра, 1975, 375 с.
9. Устройство для бокового каротажа скважин: А.С. №1022107, G01V 3/20 / Мечетин В.Ф., Королев В.А.; ВНИНПГ. - № заявки 337973/18-25; заявл. 06.01.82, опубл. 07.06.83, Бюл. 21.
10. Детальное азимутальное электрическое сканирование. - Краснодар: Министерство энергетики РФ, ОАО НПО «НЕФТЕГЕОФИЗПРИБОР», 2000.
11. Двойной (компенсированный) боковой микрокаротаж (ДМБК). - Краснодар: Министерство энергетики РФ, ОАО НПП «НЕФТЕНЕОФИЗПРИБОР», 2000.
12. Чаадаев Е.В., Павлова Л.И. К теории кольцевых зондов в анизотропной цилиндрически-слоистой среде. / Изв. ВУЗов, Геология и разведка, 1980. №10. N С.105-112.
13. Ильинский В.М. Боковой каротаж. - М.: Недра, 1971.
14. Устройство для электрического каротажа. А.С. №1511728.
15. В.Н. Еремин. Прибор высокочастотного электромагнитного каротажа в процессе бурения ВИКПБ-7. АИС., НТВ «Каротажник» №5-6 (132-133), С.235-243.
16. Сидоров В.А. Импульсная индуктивная электроразведка N М:. Недра, 1985. N 192 с.
Изобретение относится к геофизическим исследованиям в скважинах, бурящихся на нефть и газ. Технический результат: повышение эффективности геонавигации горизонтальных скважин в пластах коллекторов малой мощности, а также в непосредственной близости от кровли нефтяного или нефтегазового коллектора. Сущность: способ основан на возбуждении импульсного электромагнитного поля и измерении магнитных полей вихревых токов в породах. Возбуждение электромагнитного поля осуществляется с помощью электрического диполя, питаемого импульсным разнополярным током. Измерения магнитных полей вихревых токов проводят в период паузы между импульсами тока малогабаритными индуктивными датчиками, ориентированными в трех ортогональных направлениях. По анализу кривых спада магнитных полей вихревых токов формируют команды на управление положением отклонителя бурильного инструмента. Устройство содержит долото, забойный двигатель с ориентатором и отклонителем, измерительный модуль. Измерительный модуль выполнен в виде немагнитной высокопрочной трубы с расположенными на концах питающими электродами, жестко соединенной с бурильными трубами и представляющей собой электрический диполь, питаемый импульсным разнополярным током. Измерительный модуль содержит малогабаритные индуктивные датчики, расположенные в теле трубы. 2 н.п. ф-лы, 4 ил.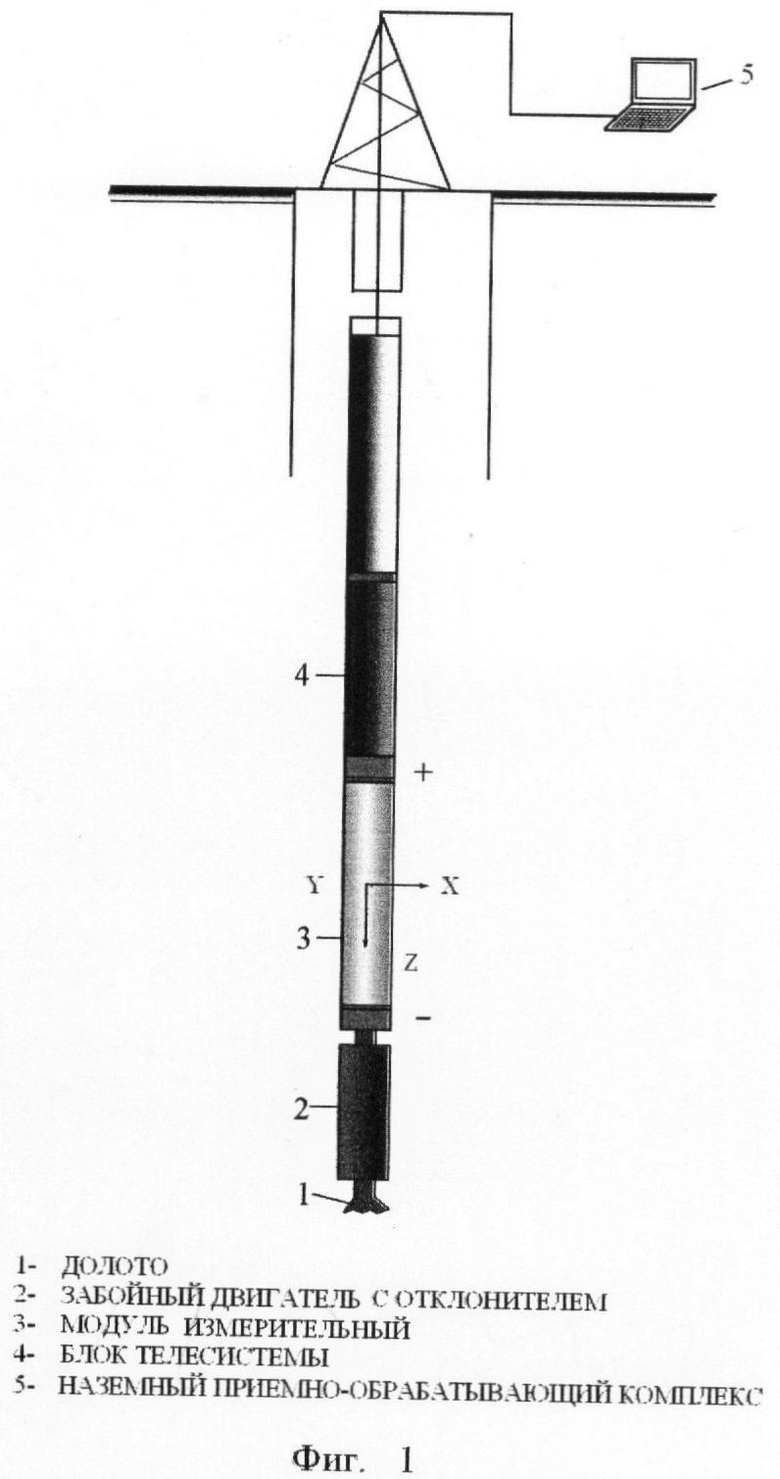
1. Способ геонавигации горизонтальных скважин, заключающийся в возбуждении импульсного электромагнитного поля и измерении магнитных полей вихревых токов в породах, отличающийся тем, что возбуждение электромагнитного поля проводят с помощью электрического диполя, питаемого импульсным разнополярным током, а измерения магнитных полей вихревых токов проводят в период паузы между импульсами тока малогабаритными индуктивными датчиками, ориентированными в трех ортогональных направлениях, и по анализу кривых спада магнитных полей вихревых токов формируют команды на управление положением отклонителя бурильного инструмента.
2. Устройство геонавигации горизонтальных скважин, содержащее долото, забойный двигатель с ориентатором и отклонителем, измерительный модуль, связанный с наземным приемно-обрабатывающим комплексом, отличающееся тем, что измерительный модуль выполнен в виде немагнитной высокопрочной трубы с расположенными на концах питающими электродами, жестко соединенной с бурильными трубами и представляющей собой электрический диполь, питаемый импульсным разнополярным током, при этом измерительный модуль содержит малогабаритные индуктивные датчики для измерения магнитных полей вихревых токов, при этом индуктивные датчики расположены в теле трубы, а их магнитные моменты ориентированы в трех ортогональных направлениях.
| СПОСОБ ГЕОНАВИГАЦИИ ГОРИЗОНТАЛЬНЫХ СКВАЖИН | 2001 |
|
RU2230343C2 |
| УСТРОЙСТВО ДЛЯ ПРОВОДКИ НАКЛОННО-НАПРАВЛЕННЫХ И ГОРИЗОНТАЛЬНЫХ СКВАЖИН | 2004 |
|
RU2278236C1 |
| СПОСОБ ПРОВОДКИ СТВОЛА ГОРИЗОНТАЛЬНОЙ СКВАЖИНЫ НА ОСНОВЕ ГЕОЛОГИЧЕСКИХ ИССЛЕДОВАНИЙ | 2006 |
|
RU2313668C1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |

