ПРЕДПОСЫЛКИ
В общем настоящее раскрытие относится к области скважинного каротажа, а более конкретно к способам с использованием одной или нескольких наклонных пар излучатель-приемник электромагнитных волн для усовершенствованных электромагнитных измерений подземных пластов.
В области разведки и добычи углеводородов известны различные способы скважинного каротажа. В этих способах обычно используют приборы, снабженные источниками, приспособленными к излучению энергии в подземный пласт, через который проходит буровая скважина. Излучаемая энергия может взаимодействовать с окружающим пластом с образованием сигналов, которые можно обнаруживать и измерять с помощью одного или нескольких датчиков. На основании данных об обнаруженных сигналах можно получать профиль свойств пласта (например, удельного сопротивления как функции глубины ствола скважины).
Примеры скважинных каротажных приборов могут включать в себя приборы электромагнитного (ЭМ) каротажа удельного сопротивления, такие как приборы индукционного каротажа или каротажа по распространению электромагнитных волн. Приборы электромагнитного каротажа удельного сопротивления можно располагать в буровой скважине для измерения электрической удельной проводимости (или обратной величины ее, удельного сопротивления) пласта, окружающего буровую скважину. Обычные приборы электромагнитного каротажа удельного сопротивления включают в себя по меньшей мере один излучатель и два приемника, при этом каждый приемник расположен на некотором расстоянии от излучателя вдоль оси прибора. Обычные излучатели и приемники включают в себя антенны, образованные рамками, имеющими один или несколько витков изолированного провода, намотанного вокруг держателя. Как понятно специалисту в соответствующей области техники, согласно принципу обратимости каждая из этих антенн может работать как излучатель и/или приемник.
В приборах электромагнитного индукционного каротажа удельное сопротивление пласта определяется в соответствии с измерением напряжения, создаваемого на приемнике токами, протекающими в пласте в ответ на электромагнитный сигнал, излучаемый излучателем. В приборе индукционного каротажа излучатель соединен с источником переменного тока, таким как генератор, образующим изменяющийся во времени электромагнитный сигнал. Электромагнитный сигнал от излучателя проходит в окружающий пласт, при этом флуктуирующий ток или вихревой ток наводится в пласте вблизи излучателя. Вихревой ток в пласте приводит к возрастанию изменяющегося во времени электромагнитного сигнала, который создает электрическое напряжение на приемнике. При использовании пары разнесенных приемников напряжения, создаваемые на двух приемниках, обычно имеют различные фазы и амплитуды вследствие, например, геометрического расхождения и поглощения в окружающем пласте. Приборы каротажа по распространению электромагнитных волн работают аналогичным образом, но обычно на более высоких частотах, чем приборы электромагнитного индукционного каротажа.
Во многих обычных приборах электромагнитного индукционного каротажа и каротажа по распространению электромагнитных волн оси излучающих и приемных антенн расположены вдоль продольной оси прибора. Таким образом, эти приборы реализованы с антеннами, имеющими продольные или осевые магнитные дипольные моменты. Поперечная антенна или рамка имеет магнитный дипольный момент, который перпендикулярен к оси прибора, а наклонная антенна имеет магнитный дипольный момент, который не параллелен и не перпендикулярен к оси прибора.
Поскольку электромагнитные сигналы, излучаемые и принимаемые прибором электромагнитного каротажа удельного сопротивления, проходят через окружающий пласт, измерениями, выполняемыми такими приборами, может предоставляться информация, относящаяся к электромагнитным свойствам сред, через которые проходят сигналы. Информация, такая как расстояние до границ пласта, падение пласта и анизотропия, может быть извлечена из принимаемых сигналов.
В отрасли бурения имеется все возрастающая необходимость в точном размещении скважины. Для оптимального размещения буровой скважины в коллекторе необходимы направленные измерения, на которых могут быть основаны решения относительно управления. Кроме того, при разведке углеводородов требуется идентификация и определение характеристик запасов углеводородов. Например, анизотропию пласта можно использовать для идентификации залежи с низким удельным сопротивлением, находящейся в тонкослоистых пластах.
Во многих последних патентах раскрыты способы и устройства для выполнения направленных измерений и получения анизотропии удельного сопротивления. В патенте США №5508616 (Sato et al.) раскрыт прибор индукционного типа с двумя рамками, наклоненными в различных направлениях, не совпадающих с продольной осью прибора, предназначенный для применения при каротаже во время бурения. Прибор может быть приспособлен для геонавигации. Для подтверждения направленности измерения использован простой аргумент, заключающийся в том, что функция чувствительности двух наклонных рамок концентрируется к области перекрытия участков чувствительности рамок. Sato и соавторы заявляют, что при повороте прибора насыщенное изображение азимутального удельного сопротивления пласта может быть получено для содействия принятию решения относительно управления. Однако в этом патенте не представлены никакие подробности относительно того, каким образом можно получать азимутальное удельное сопротивление, а также не рассмотрены никакие способы обнаружения/определения характеристик границ, необходимые для принятия количественного решения о геонавигации.
В патенте США №6181138 (Hagiwara et al.) притязание Sato и соавторов на одиночные фиксированные направленные рамки расширено на совмещенные строенные ортогональные индукционные рамки на местах нахождения излучателя и приемника. Считается, что поворот прибора не требуется, поскольку направление фокусирования можно ориентировать произвольно путем нелинейного объединения откликов ортогональных рамок.
В патенте США №6297639 (Clark et al.), который принадлежит правопреемнику настоящего раскрытия, раскрыты способ и устройство для выполнения направленных измерений при использовании различных конструкций экранов для обеспечения избирательного ослабления энергии электромагнитных волн на осевых, наклонных и поперечных антенных рамках. Среди прочего в этом патенте описаны обычные направленные измерения индукции и основанные на распространении электромагнитных волн измерения с использованием наклонных рамок и соответствующих экранов, а также процесс выполнения компенсации за влияние буровой скважины. Clark и соавторы описали сочетание одной излучающей рамки и одной приемной рамки, по меньшей мере одна из которых находится под углом относительно прибора, а также применение такого сочетания для обнаружения направления на границу пласта путем наблюдения азимутального изменения наводимого сигнала при вращении прибора. Азимутальное изменение электромагнитного контакта можно использовать для направления скважин во время бурения. К другим патентам, выданным на экраны, относятся патент США №6351127 (Rosthal et al.) и патент США №6566881 (Omeragic et al.), которые оба принадлежат правопреемнику настоящего раскрытия.
В патенте США №6476609 (Bittar) притязание ранее выданного патента на анизотропию (патента США №6163155, также Bittar) расширено на область геонавигации. Отклик на напластование наклоняемого кверху/книзу устройства индукционного каротажа и каротажа по распространению электромагнитных волн описан с помощью разности или отношения сигналов при двух различных ориентациях, но без упомянутого экранирования. Эффекты анизотропии или падения не рассмотрены. Кроме того, в патенте ʹ609 отсутствует описание, каким образом использовать эти измерения для получения точного расстояния до границы слоя пласта. В патенте ʹ609 потенциально предполагается, что ориентация напластования точно известна, вследствие чего можно вычислить отклик при наклоне кверху/книзу. Однако не раскрыт способ обнаружения точного направления вверх или вниз для вычисления направленных сигналов сверху/снизу.
В патенте США №6969994 (Minerbo et al.), который также принадлежит правопреемнику настоящего раскрытия, раскрыты конфигурации приборов и способы симметризации, которыми отклики направленных измерений приводятся к точкам, так что они становятся почти независимыми от анизотропии или угла падения. Отклики от границ пластов, имеющих различные падения и анизотропию, по существу перекрываются, за исключением места вблизи границы пласта. Оба этих измерения, измерение индукции двумя рамками (одной излучающей и одной приемной: «ИП») и измерение распространения электромагнитной волны тремя рамками (одной излучающей и двумя приемными: «ИПП») могут быть симметризированы для обеспечения этого приведения к простейшему виду. Симметризацию выполняют при использовании двух наклонных пар излучатель-приемник при одном и том же разнесении, но при перестановке угла наклона излучателя и угла наклона приемника.
В патенте США №6998844 (Omeragic et al.), также принадлежащем правопреемнику настоящего раскрытия, раскрыты направленные измерения распространения электромагнитных волн, предназначенные для определения анизотропии в почти вертикальных скважинах с компенсацией за влияние буровой скважины. Кроме того, для получения анизотропного свойства пласта используются способы инверсии.
Кроме того, в обычным образом переуступленном патенте США №7202670 (Omeragic et al.) раскрыт способ извлечения азимутальной зависимости из направленных каротажных измерений и анализа этой зависимости при использовании результатов измерений, получаемых на всех азимутальных углах, для определения характеристик подземного пласта и для управления скважинными буровыми компоновками с повышенной точностью. В нем показано, как определять азимут напластования на основании направленных измерений и получать измерения, которые можно использовать для размещения скважины по высоте или направления ее по азимуту. Кроме того, показаны способы использования этих направленных измерений в реальном времени для получения расстояний до границ пластов и для получения точных моделей геологической среды, чтобы могли быть приняты решения по геонавигации при размещении скважины. Кроме того, раскрыт способ обнаружения наличия анизотропии удельного сопротивления в слоях пластов вблизи почти вертикальных скважин. В дополнение к этому показан способ получения информации о структуре падения на основании направленных измерений в вертикальных или пологих скважинах.
Как описывалось выше, в приборах электромагнитного индукционного каротажа удельное сопротивление пласта определяется по измерению напряжения, создаваемого на приемнике токами, протекающими в пласте, в ответ на электромагнитный сигнал, излучаемый излучателем. В общем случае напряжение, создаваемое на приемнике, представляет собой линейную комбинацию всех составляющих Vij (i, j=x, y, z) электромагнитной связи, образующих тензор 3×3 электромагнитной связи. В пласте планарной геометрии, в котором все релевантные границы напластования параллельны, имеются только пять ненулевых элементов в матрице 3×3 электромагнитной связи, обозначаемые как Vxx, Vyy, Vzz, Vxz и Vzx. Систему координат выбирают так, чтобы ось z располагалась вдоль оси прибора и ось y была параллельна плоскости границы. Поскольку этими составляющими электромагнитной связи определяются характеристики пласта, желательно иметь устройство и способ для определения их.
С определенными трудностями можно столкнуться при использовании обычных приборов каротажа удельного сопротивления по распространению электромагнитных волн, когда магнитные дипольные моменты излучателей и приемников ориентированы по существу параллельно оси прибора. Одна трудность заключается в том, что измерения чувствительны к или подвергаются воздействию анизотропии, когда относительный угол падения больше чем 45°. Это можно легко понять в экстремальном случае вертикальной скважины, поскольку в вертикальной скважине наводимый ток обычно параллелен горизонтальной плоскости и поэтому в предположении, что слои пласта также параллельны горизонтальной плоскости, отклик не несет никакой информации о вертикальном удельном сопротивлении. Другая трудность заключается в том, что вертикальное удельное сопротивление и относительный угол падения связаны. Поэтому даже при относительно большом угле падения одновременное определение горизонтального удельного сопротивления (Rh), вертикального удельного сопротивления (Rv) и относительного угла (θ) падения невозможно для однородных пластов. Кроме того, воздействия на окружающую среду могут изменять связь между Rh и θ.
КРАТКОЕ ИЗЛОЖЕНИЕ
Это краткое изложение представлено для ознакомления с выбором концепций, которые дополнительно рассмотрены ниже в подробном описании. Это краткое изложение не предназначено для идентификации ключевых или существенных признаков заявленного предмета изобретения и не предполагается использование его в качестве средства ограничения объема заявленного предмета изобретения.
Согласно одному аспекту способ каротажа подземных пластов, вскрываемых стволом скважины, включает в себя измерение электромагнитных свойств пластов с использованием электромагнитных полей, имеющих ось магнитного дипольного момента, параллельную оси каротажного прибора. Электромагнитные свойства пластов измеряют при использовании электромагнитных полей, имеющих ось магнитного диполя, косую к оси каротажного прибора. Горизонтальное удельное сопротивление пластов определяют на основании измерений при параллельной оси диполя. Вертикальное удельное сопротивление, границы слоев пластов и углы падения пластов определяют на основании измерений при параллельной и косой оси диполя.
Другие аспекты и преимущества настоящего раскрытия станут очевидными из нижеследующего описания и формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Некоторые варианты осуществления описываются ниже с обращением к нижеследующим чертежам, на которых:
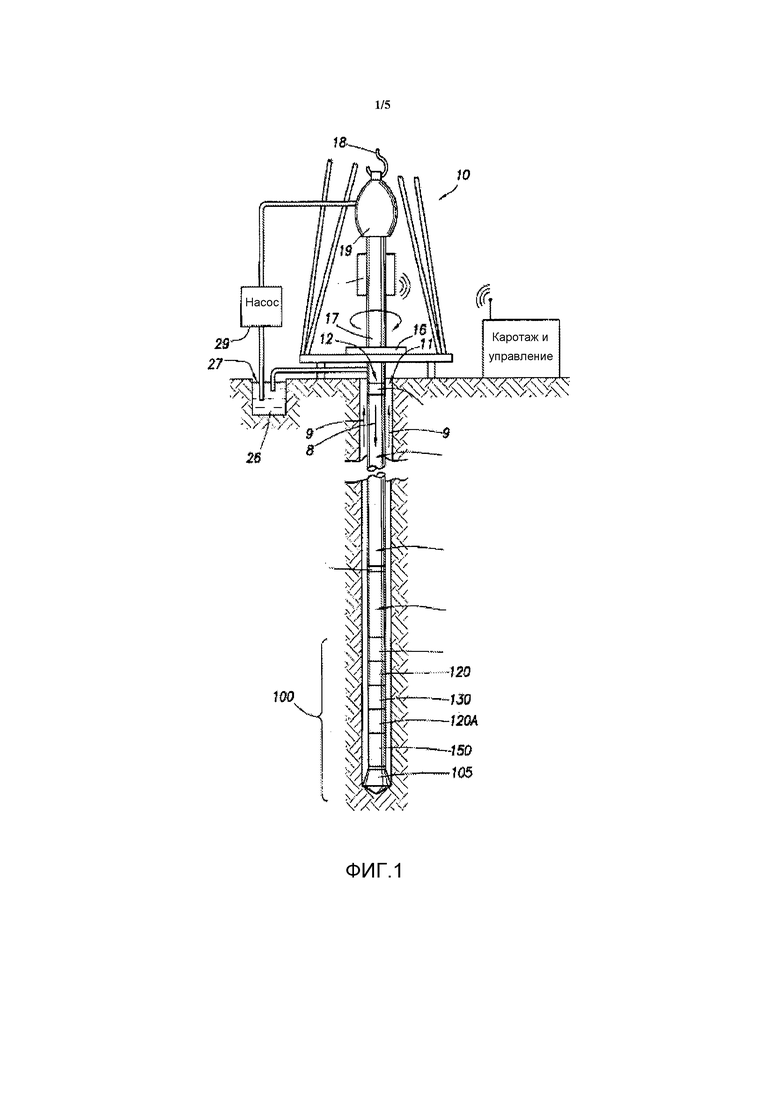
Фиг. 1 - вид приведенной для примера системы на месте расположения скважины, в которой можно использовать настоящее раскрытие, согласно примеру варианта осуществления;
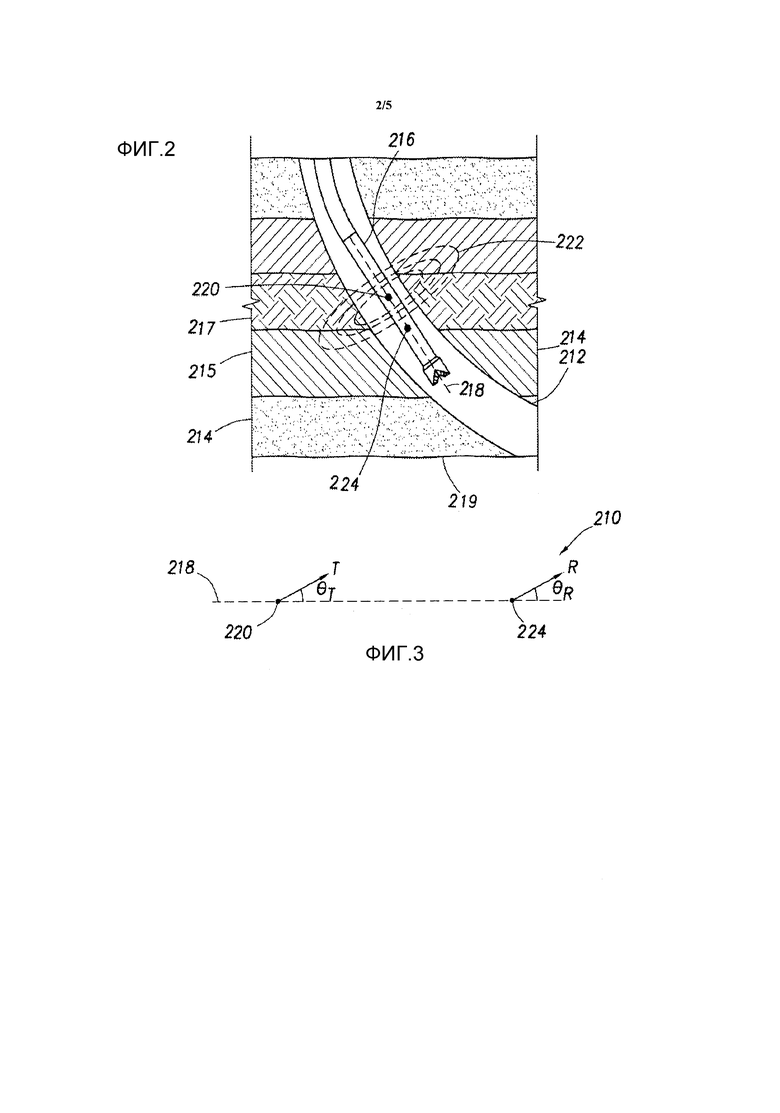
Фиг. 2 - схематическое представление каротажной операции, предназначенной для получения параметров подземных пластов, согласно примеру варианта осуществления;
Фиг. 3 - схематический вид конкретной конфигурации одной пары излучатель-приемник согласно примеру варианта осуществления;
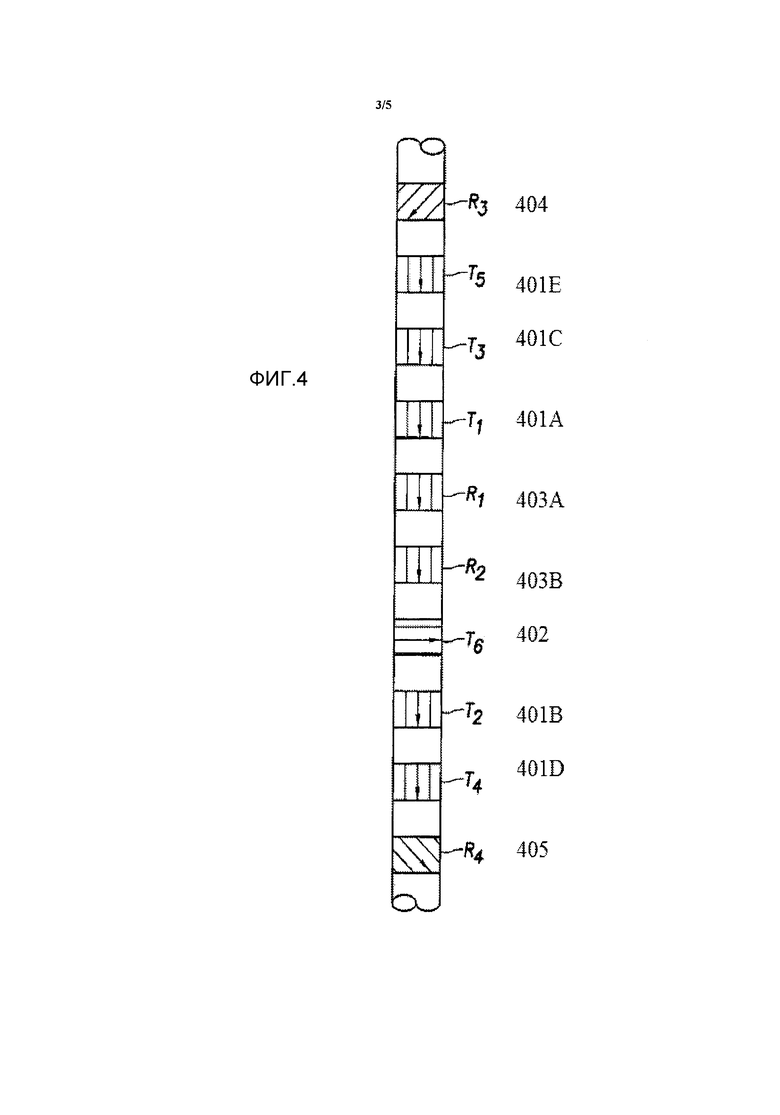
Фиг. 4 - вид прибора направленного каротажа во время бурения с большим радиусом исследования как части прибора каротажа во время бурения или приборов 120 на фиг. 1 согласно примеру варианта осуществления;
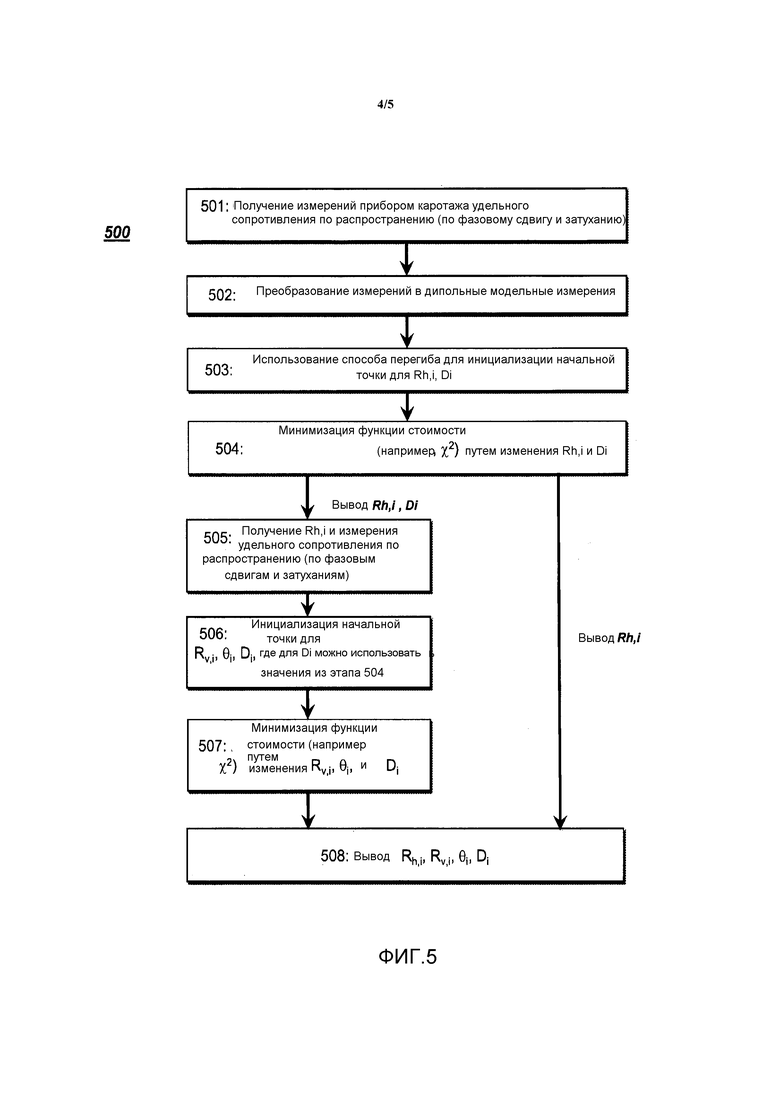
Фиг. 5 - блок-схема последовательности действий, иллюстрирующая способ определения значений Rh, Rv и θ согласно примеру варианта осуществления; и
Фиг. 6 - приведенная для примера компьютерная система, которую можно использовать для реализации обработки сигналов, при которой, например, выполняют способ, показанный на фиг. 5, согласно некоторым вариантам осуществления.
ПОДРОБНОЕ ОПИСАНИЕ
Настоящее описание будет выполнено с обращением к сопровождающим чертежам, на которых показаны примеры вариантов осуществления. Однако можно использовать многие другие варианты осуществления, и поэтому описание не должно толковаться как ограниченное вариантами осуществления, изложенными в этой заявке. Точнее, эти варианты осуществления представлены таким образом, что это раскрытие является полным и законченным. Как правило, на всем протяжении настоящего описания одинаковыми позициями обозначены подобные элементы.
Согласно вариантам осуществления, описанным в этой заявке, в настоящем раскрытии представлены примеры способов обработки для определения значений Rh, Rv и θ (например, горизонтального удельного сопротивления, вертикального удельного сопротивления и угла падения). Некоторые варианты осуществления будут описаны ниже, в том числе представленные на нижеследующих фиг. 1-5, на которых изображены типичные или иллюстративные варианты осуществления раскрытия.
На фиг. 1 на месте расположения скважины показана система согласно примеру варианта осуществления, в которой может использоваться настоящее раскрытие. Место расположения скважины может быть на суше или в море. В соответствии с этой приведенной для примера системой буровая скважина 11 образована в подземных пластах 106 вращательным бурением, способом, который хорошо известен. Как будет описано ниже, согласно вариантам осуществления раскрытия также может использоваться наклонно-направленное бурение.
Бурильная колонна 12 подвешена в буровой скважине 11 и имеет компоновку 100 низа бурильной колонны, которая на нижнем конце включает в себя буровое долото 105. Наземная система включает в себя платформу и узел 10 буровой вышки, расположенные над буровой скважиной 11, при этом узел 10 включает в себя роторный стол 16, ведущую трубу 17, буровой крюк 18 и вертлюг 19. Бурильная колонна 12 вращается роторным столом 16, приводимым в движение не показанным средством и находящимся в зацеплении с ведущей трубой 17 на верхнем конце бурильной колонны. Бурильная колонна 12 подвешена на буровом крюке 18, прикрепленном к талевому блоку (также не показанному), через посредство ведущей трубы 17 и вертлюга 19, который обеспечивает вращение бурильной колонны относительно бурового крюка. Как хорошо известно, в качестве варианта можно использовать систему верхнего привода.
Согласно примеру этого варианта осуществления наземная система также включает в себя буровой раствор 26 или промывочную жидкость в емкости 27, образованной на месте расположения скважины. Насос 29 нагнетает буровой раствор 26 во внутреннее пространство бурильной колонны 12 через отверстие в вертлюге 19, вызывая протекание бурового раствора вниз по бурильной колонне 12, что показано направленной стрелкой 8. Как показано направленными стрелками 9, буровой раствор выходит из бурильной колонны 12 через отверстия в буровом долоте 105 и затем направляется вверх через область кольцевого пространства между внешней стороной бурильной колонны и стенкой буровой скважины 11. Этим хорошо известным способом буровой раствор смазывает буровое долото 105 и переносит обломки 106 выбуренной породы на поверхность, тогда как он возвращается в емкость 27 для повторного использования.
Согласно различным вариантам осуществления системы и способы, раскрытые в этой заявке, можно использовать с любыми средствами транспортировки, известными специалистам в соответствующей области техники. Например, системы и способы, раскрытые в этой заявке, можно использовать в приборах или другой электронной аппаратуре, транспортируемой на каротажном кабеле, тросе, транспортируемой на бурильной трубе, на гибкой трубе при бурении и/или в промежуточном устройстве во время бурения. Только для примера на фиг. 1 показано промежуточное устройство для транспортировки во время бурения. Однако системы и способы, раскрытые в этой заявке, равным образом можно применять к кабельным или любым другим подходящим транспортировочным средствам. Компоновка 100 низа бурильной колонны согласно показанному варианту осуществления включает в себя модуль 120 каротажа во время бурения (КВБ), модуль 130 измерения в процессе бурения (ИПБ), систему вращательного управляемого наклонно-направленного бурения и двигатель 150 и буровое долото 105.
Модуль 120 каротажа во время бурения размещен в утяжеленной бурильной трубе особого вида, известной из области техники, и может содержать один или множество каротажных приборов известных типов (например, каротажный прибор 121). Кроме того, должно быть понятно, что можно использовать больше одного модуля каротажа во время бурения и/или измерения в процессе бурения, например, представленного позицией 120А. (На всем протяжении описания обращения к модулю при позиции 120 также могут альтернативно означать обращения к модулю при позиции 120А). Модуль каротажа во время бурения обладает функциональными возможностями измерения, обработки и сохранения информации, а также связи с наземным оборудованием. Согласно настоящему варианту осуществления модуль каротажа во время бурения включает в себя электромагнитный прибор измерения удельного сопротивления.
Модуль 130 измерения в процессе бурения также размещен в утяжеленной бурильной трубе особого вида, известной из области техники, и может содержать одно или несколько устройств для измерения характеристик бурильной колонны и бурового долота. Прибор измерения в процессе бурения также включает в себя установку (не показанную) для выработки электрической энергии для скважинной системы. Обычно она может включать в себя турбинный генератор, приводимый в действие потоком бурового раствора, при этом понятно, что можно использовать другие энергетические и/или батарейные системы. Согласно настоящему варианту осуществления модуль измерения в процессе бурения включает в себя одно или несколько измерительных устройств следующих видов: устройство измерения нагрузки на долото, устройство измерения крутящего момента, устройство измерения вибрации, устройство измерения ударных нагрузок, устройство измерения прихвата-проскальзывания и устройство измерения наклона.
На фиг. 2 дано схематическое представление каротажной операции согласно примеру варианта осуществления, предназначенной для получения параметров подземных пластов. Буровую скважину или ствол 212 скважины пробуривают, вскрывая подземные пласты 214, обычно под углом, а не перпендикулярно к пластам 214. Конкретный пласт 215 может иметь верхнюю и нижнюю границы. Слой 217 непосредственно над конкретным пластом 215 обычно называют верхним плечом и слой 219 несколько ниже называют нижним плечом. В стволе 212 скважины расположен прибор 216, имеющий одну пару излучатель-приемник (ИП) в виде антенн, при этом обе антенны находятся под углом относительно приборной оси 218 прибора 216. Кроме того, прибор 216 может содержать соответствующую электронику и схемы (не показанные), необходимые для работы прибора 216, но раскрытие не ограничено ими. При возбуждении излучатель 220 излучает электромагнитную энергию в окружающие пласты 214, которая наводит ток 222 (вихревой ток) в пластах 214 вокруг излучателя 220. Вихревой ток 222 наводит напряжение в приемной антенне 224. Угол φВ между осью 218 прибора (которая по существу совпадает с осью буровой скважины) и нормалью к плоскости конкретного пласта, такого как пласт 215, называют относительным падением пласта или углом ориентации напластования.
В некоторых реализациях настоящего раскрытия, описанных в этой заявке, используются симметризованные и антисимметризованные отклики, получаемые с одной пары излучатель-приемник, необходимые для выполнения направленных измерений и получения информации об анизотропии. На фиг. 3 показано схематическое представление конкретной конфигурации одной пары излучатель-приемник согласно примеру варианта осуществления. На фигуре ось 218 прибора показана пунктирной линией на виде сбоку и точкой на виде с торца. Конфигурация 210 включает в себя наклонный излучатель 220 и наклонный приемник 224, и это означает, что магнитные дипольные моменты излучателя 220 и приемника 224 не параллельны и не перпендикулярны к оси 218 прибора. Излучатель 220 и приемник 224 можно аппроксимировать точечными магнитными диполями. Согласно настоящему раскрытию магнитные дипольные моменты излучателя 220 и приемника 224 могут находиться, но необязательно, в одной плоскости, а согласно некоторым вариантам осуществления желательно, чтобы магнитные дипольные моменты излучателя 220 и приемника 224 находились в двух непараллельных плоскостях, например в двух ортогональных плоскостях.
Как можно понять, поскольку излучатель 220 и приемник 224 наклонены, дипольные моменты излучателя 220 и приемника 224 можно считать имеющими косую ось дипольного момента (под косой понимается не параллельная и не перпендикулярная к оси, например 218, прибора). В соответствии с этим излучатель 220 может создавать электромагнитное поле, имеющее ось магнитного дипольного момента, которая является косой к оси 218 прибора. Аналогично этому измерения, получаемые с помощью наклонного приемника 224, можно назвать измерениями при косой оси диполя. Излучатели и приемники, которые ориентированы в осевом направлении (параллельно оси прибора), могут иметь параллельные оси дипольных моментов.
На фиг. 4 представлен прибор направленного каротажа во время бурения с большим радиусом исследования как часть прибора каротажа во время бурения или приборов 120 из фиг. 1. Сигналы с приборов, имеющих расположенные на одной оси цилиндрически симметричные излучающие и приемные рамки, не чувствительны к направлению. Прибор из фиг. 4 снабжен наклонными и поперечными излучающими и приемными рамками для получения чувствительных к направлению измерений. Прибор может включать в себя шесть излучающих антенн и четыре приемные антенны. Пять излучающих антенн (с Т1 по Т5) 401А-Е размещены в осевом направлении по длине прибора. Шестая излучающая антенна (Т6) 402 ориентирована поперек оси прибора. Приемная антенна, показанная как 404, 405, расположена на каждом конце прибора. Эта пара приемных антенн (R3 и R4) 404, 405 ограничивает с обеих сторон излучатели, а каждый из этих приемников наклонен так, что его дипольный момент ориентирован под углом 45° к оси прибора (то есть является косым к оси прибора). Дополнительная пара приемных антенн (R1 и R2) 403А-В, расположенная в центре группы рамок, размещена в осевом направлении (то есть их дипольные моменты по существу параллельны оси прибора) и позволяет получать обычные измерения удельного сопротивления по распространению электромагнитных волн. В описанной компоновке создается предпочтительная чувствительность к удельной проводимости на одной стороне прибора. При повороте прибора его датчиками могут обнаруживаться ближние зоны проводимости и может регистрироваться направление, с которого может быть измерена максимальная удельная проводимость. Магнитометры и акселерометры могут обеспечивать гравитационные (то есть относительно вертикали) и геомагнитные опорные данные о направленной ориентации прибора для определения направления максимальной удельной проводимости. В дополнение к зависящим от направления функциональным возможностям прибор обеспечивает измерения с относительно большим радиусом исследования, чем большинство обычных приборов каротажа удельного сопротивления во время бурения. Согласно некоторым вариантам осуществления гирлянда приборов, содержащая такой прибор каротажа удельного сопротивления, сконфигурированный так, как показано на фиг. 4, может также обеспечить двунаправленную телеметрию по бурильной колонне по существу в реальном времени, которая при использовании в сочетании с функциональными возможностями описанного прибора направленного каротажа удельного сопротивления позволит улучшить характеристики геонавигации за счет увеличения количества данных на поверхности и тем самым повысить возможную скорость и точность управления наклонно-направленным бурением.
Хотя рассмотрение в этой заявке сосредоточено на измерениях прибором электромагнитного каротажа по распространению электромагнитных волн, должно быть понятно, что такие способы можно также применять для измерений приборами индукционного каротажа. Теперь ниже будут представлены и описаны с обращением к фиг. 5 примеры математических теорий, лежащих в основе раскрытия.
Согласно некоторым вариантам осуществления в раскрытии представлены примеры способов обработки для последовательного определения значений (Rh, Rv, θ) на основании различных групп измерений. Согласно примерам вариантов осуществления значения Rh можно определять при использовании обычных измерений прибором каротажа удельного сопротивления по распространению электромагнитных волн в предположении изотропного пласта. Это обусловлено тем, что в пологих скважинах (или когда наклон скважины является таким, что скважина пересекает пласты приблизительно перпендикулярно) обычные измерения прибором каротажа удельного сопротивления по распространению электромагнитных волн преимущественно чувствительны к горизонтальным удельным сопротивлениям. Затем значение Rh можно фиксировать и на основании его и направленных измерений удельного сопротивления можно определить Rv и θ.
На фиг. 5 представлена блок-схема последовательности действий, иллюстрирующая пример способа 500 определения значений Rh, Rv и θ. На этапе 501 способ начинают с обычных измерений прибором каротажа удельного сопротивления по распространению электромагнитных волн, которые могут включать в себя измерения фазового сдвига и затухания при различных расстояниях между излучателем и приемником и при различных частотах излучателя. Примеры приборов для выполнения таких измерений могут включать в себя прибор, продаваемый под товарным знаком ARC или ARCVISION, которые являются товарными знаками Schlumberger Technology Corporation, Sugar Land, Техас. Что касается фиг. 4, то в примере варианта осуществления измерения, регистрируемые на этапе 501, могут включать в себя измерения, регистрируемые при использовании обоих осевых приемников R1, R2 (403А, 403В) (измерения при параллельной оси диполя), и измерения, регистрируемые при использовании наклонных приемников R3 (404) и R4 (405 (измерения при косой оси диполя).
На этапе 502 измеренные фазовый сдвиг и затухания преобразуют в измерения с аппроксимациями диполем. Этот элемент примера способа может быть желательным, поскольку в части инверсии, поясняемой ниже (минимизации функции стоимости), код прямого моделирования основан на модели диполя. Преобразование заключается в превращении измерения недипольной антенной в эквивалентный отклик дипольной антенны. В одном конкретном варианте осуществления этот этап может содержать следующие подэтапы:
(1) Для данного однородного пласта с удельным сопротивлением Rt вычисление отклика для реального прибора, который может включать в себя недипольные антенны.
(2) Для того же пласта с Rt вычисление отклика дипольной антенны, которая является упрощенным представлением реального прибора.
(3) В таком случае для любого данного пласта с удельным сопротивлением Rt будут отклики прибора с недипольной антенной и прибора с дипольной антенной. Можно составить таблицу со всеми возможными значениями Rt, которые связывают отклики дипольной и недипольной антенн.
(4) Получение исходного измерения с прибора (например, с показанного на фиг. 4) и нахождение соответствующего Rt согласно таблице. Для одного и того же Rt можно найти отклик дипольного прибора из таблицы. Затем после выполнения описанной выше процедуры для любого исходного измерения (недипольного) можно найти соответствующий отклик диполя.
Согласно одному варианту осуществления этот процесс дипольных преобразований выполняют относительно измерений при параллельной оси диполя (например, с использованием осевых излучателей и приемников R1, R2 из примера на фиг. 4), но необязательно относительно измерений при косой оси диполя (например, с использованием наклонных приемников R3, R4 из примера на фиг. 4). Измерения при косой оси диполя в таком варианте осуществления, которые могут использоваться для определения вертикального удельного сопротивления, начиная с этапа 505 способа 500, рассмотрены более подробно ниже.
На этапе 503 составляют модель пласта со слоистой структурой, в которой Rh,i (1<i<N) и Di (1<i<N-1) являются горизонтальным удельным сопротивлением и положением нижней границы i-го слоя соответственно, а N является числом слоев. В некоторых вариантах осуществления, особенно в тех, в которых рассматриваются пологие скважины, измерения могут иметь очень небольшую чувствительность или не иметь ее к вертикальному удельному сопротивлению и относительному углу падения. В таком случае в этой составной части способа можно использовать алгоритм перегиба для каротажных диаграмм с резкими изменениями одной из кривых удельного сопротивления, например удельного сопротивления по сдвигу фаз при разносе 22 дюйма (55,88 см) и частоте 2 МГц, и использовать значения удельного сопротивления и положения границ из каротажной диаграммы с резкими изменениями в качестве исходной начальной точки для параметров Rh,i (1<i<N) и Di (1<i<N-1).
На этапе 504 можно построить функцию стоимости вида χ2. Согласно одному варианту осуществления функция стоимости может быть суммой квадрата разностей между измеренными данными и данными прямого моделирования, взвешенными в соответствии с обратной величиной неопределенности. Согласно некоторым вариантам осуществления затем в способе можно минимизировать функцию стоимости при использовании любого известного алгоритма оптимизации, такого как метод Гаусса-Ньютона, чтобы найти согласованную модель. Затем на основании согласованной модели из минимизированной функции стоимости можно вывести значения Rh,i (1<i<N) и Di (1<i<N-1). Таким образом, кратко формулируя, на этапах 501-504 определяют горизонтальное удельное сопротивление пласта с использованием измерений при параллельной оси диполя (например, измерений, получаемых с помощью приемников с магнитными диполями, имеющими ось, параллельную оси прибора, таких приемников, как R1, R2 из фиг. 4).
На этапе 505 можно получить измерения фазового сдвига и затухания при выполнении направленных измерений удельного сопротивления, а также горизонтальное удельное сопротивление и положения пограничных слоев, вычисленные на этапе 504. Как изложено выше, измерения, получаемые на этапе 505, могут включать в себя измерения при косой оси диполя, такие измерения, как регистрируемые с помощью наклонных антенн R3, R4 в примере на фиг. 4. Должно быть понятно, что эти измерения при косой оси диполя можно получать на этапе 501, что отмечалось выше, но без использования при инверсии, описанной в этой заявке до этапа 505.
На этапе 506 составляют модель пласта со слоистой структурой. Однако, поскольку измерения получают от приборов направленного каротажа удельного сопротивления, которые чувствительны к горизонтальным удельным сопротивлениям, вертикальным удельным сопротивлениям и к относительным углам падения, модель пласта можно параметризовать в соответствии с Rh,i (1<i<N), Rv,i (1<i<N), Di (1<i<N-1) и θ. Согласно некоторым вариантам осуществления в способе все слои можно предположить параллельными. В соответствии с этим в некоторых вариантах осуществления может иметься только один относительный угол θ падения. Значения Rh,i (1<i<N), получаемые на этапе 504, могут быть фиксированными, и в таком случае в способе можно инициализировать начальные значения Rv,i (1<i<N), Di (1<i<N-1) и θ при использовании исходных значений Di, полученных на этапе 504.
На этапе 507 можно составить функцию стоимости вида χ2 при использовании некоторых или всех измерений, полученных прибором направленного каротажа удельного сопротивления. Затем функцию стоимости можно минимизировать с помощью любого известного алгоритма оптимизации, такого как метод Гаусса-Ньютона, чтобы найти согласованную модель. Затем на основании согласованной модели из этой минимизированной функции стоимости можно вывести значения Rv,i (1<i<N), Di (1<i<N-1) и θ. Таким образом, кратко формулируя, на этапах 505-507 вертикальное удельное сопротивление (Rv,i), пограничные слои (Di) пласта и угол (θ) падения пласта определяют с использованием измерений при косой оси диполя (например, измерений, получаемых с помощью приемников с магнитными диполями, имеющими ось, которая имеет угол наклона относительно оси прибора, таких приемников, как R3, R4 из фиг. 4).
После этого на этапе 508 обращенные значения Rh,i (1<i<N) из этапа 504 можно объединить с Rv,i (1<i<N), Di (1<i<N-1) и θ из этапа 507 с получением конечных выходных данных способа 500. По существу, описанный выше способ 500 обеспечивает определение горизонтального удельного сопротивления пласта на основании измерений при параллельной оси диполя (например, параллельной оси прибора) и определение вертикальных удельных сопротивлений, границ слоев пласта и/или угла падения на основании измерений при косой оси диполя (например, понятие «косая» означает отсутствие параллельности или перпендикулярности к оси прибора).
Примеры способов и этапов, описанных в вариантах осуществления, представленные ранее, являются иллюстративными, а в других вариантах осуществления без отступления от объема и сущности раскрытия некоторые действия могут выполняться в ином порядке, параллельно друг с другом, полностью опускаться и/или объединяться с действиями из других примеров способов, и/или могут выполняться некоторые дополнительные этапы. В соответствии с этим такие другие варианты осуществления включены в объем изобретения, описанного в этой заявке.
Способы настоящего раскрытия могут включать в себя компьютерную программу, которая реализует функции, описанные в этой заявке и показанные на приложенной блок-схеме последовательности действий. Однако должно быть понятно, что при программировании компьютера могут быть многочисленные различные пути реализации способов раскрытия, а способы раскрытия не следует предполагать ограниченными каким-либо одним набором программных инструкций компьютеру. Кроме того, квалифицированный программист должен быть способен написать такую компьютерную программу, чтобы можно было реализовать варианты осуществления раскрытых способов на основании блок-схемы последовательности действий и связанного с ней описания в прилагаемом тексте. По этой причине раскрытие конкретного набора инструкций программного кода не считается необходимым для адекватного понимания, каким образом выполнять и использовать системы и способы из раскрытия.
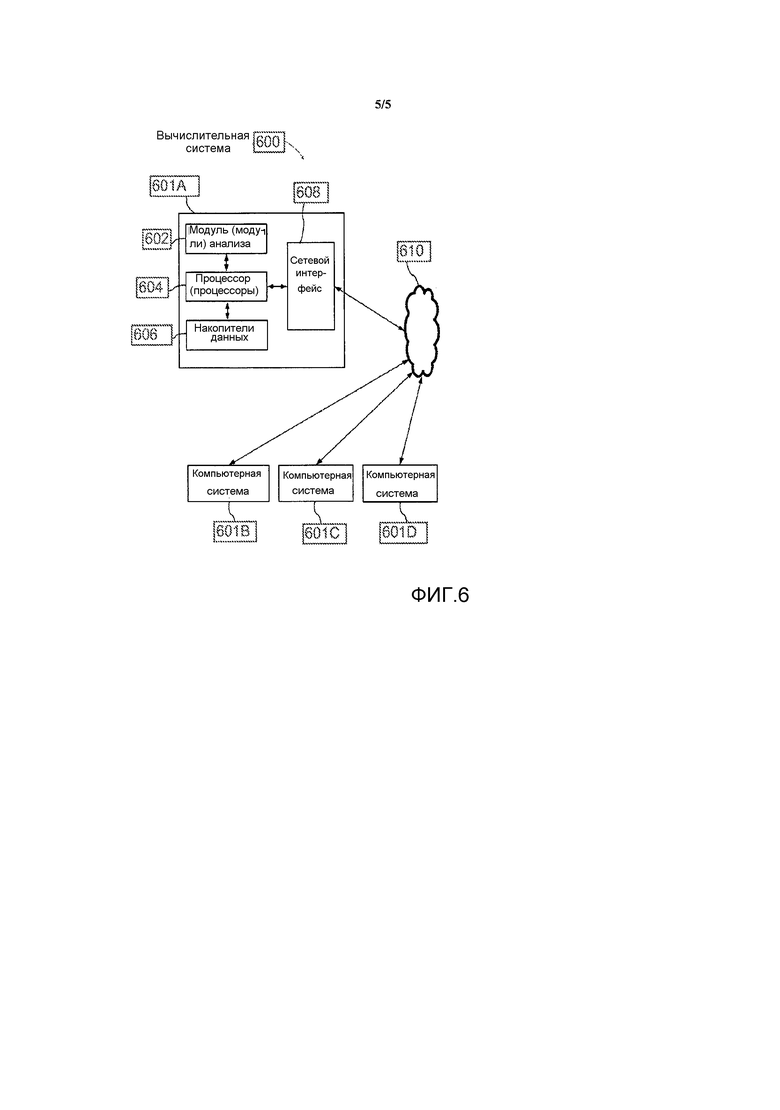
На фиг. 6 показана для примера вычислительная система 600 согласно некоторым вариантам осуществления. Вычислительная система 600 может быть индивидуальной компьютерной системой 601А или компоновкой распределенных компьютерных систем. Компьютерная система 601А может включать в себя один или несколько модулей 602 анализа, которые могут быть сконфигурированы для выполнения различных задач согласно некоторым вариантам осуществления, таких как задачи, показанные на фиг. 6. Выполнение этих различных задач в модуле 602 анализа может осуществляться независимо или при взаимодействии с одним или несколькими процессорами 604, которые могут быть соединены с одним или несколькими носителями 606 данных. Кроме того, процессор (процессоры) 606 может быть соединен с сетевым интерфейсом 608 для обеспечения связи компьютерной системы 601А по сети 610 передачи данных с одной или несколькими дополнительными компьютерными системами и/или вычислительными системами, такими как 601В, 601С и/или 601D (отметим, что в компьютерных системах 601В, 601С и/или 601D может использоваться или не использоваться такая же архитектура, как в компьютерной системе 601А, и эти системы могут располагаться в различных физических местах, например, компьютерные системы 601А и 601В могут находиться на судне, идущем в океане, или на месте бурения скважины, тогда как при поддержании связи одна или несколько компьютерных систем, таких как 601С и/или 601D, могут располагаться в одном или нескольких центрах данных на берегу, на борту судов и/или располагаться в различных странах на разных континентах).
Процессор может включать в себя микропроцессор, микроконтроллер, процессорный модуль или подсистему, программируемую интегральную схему, программируемую вентильную матрицу, интегральную схему прикладной ориентации (ASIC), процессор системы на кристалле (SoC) или управляющее или вычислительное устройство другого подходящего вида.
Носители 606 данных могут быть реализованы в виде одного или нескольких считываемых компьютером или машиночитаемых носителей данных. Заметим, что хотя в примере варианта осуществления из фиг. 6 носители 606 данных показаны находящимися в компьютерной системе 601А, в некоторых вариантах осуществления носители 606 данных могут быть распределены по многочисленным внутренним и/или внешним корпусам вычислительной системы 601А и/или дополнительных вычислительных систем и/или расположены в этих корпусах. Носители 606 данных могут включать в себя запоминающие устройства одного или нескольких различных видов, в том числе полупроводниковые запоминающие устройства, такие как динамические или статические запоминающие устройства с произвольной выборкой (DRAM или SRAM), стираемые и программируемые постоянные запоминающие устройства (EPROM), электрически стираемые и программируемые постоянные запоминающие устройства (EEPROM) и флэш-память; магнитные диски, такие как несъемные диски, дискеты и съемные диски; другие магнитные носители, в том числе ленту; оптические носители, такие как компакт-диски (CD) или цифровые видеодиски (DVD); или устройства хранения данных других видов. Заметим, что инструкции, рассмотренные выше, могут быть представлены на одном считываемом компьютером или машиночитаемом носителе данных или альтернативно могут быть представлены на многочисленных считываемых компьютером или машиночитаемых носителях данных, распределенных в большой системе, имеющей по возможности множество узлов. Такой считываемый компьютером или машиночитаемый носитель данных или носители может быть частью изделия (или изделия производства). К изделию или изделию производства можно отнести любой изготовленный один компонент или многочисленные компоненты. Носитель или носители данных можно располагать в машине, исполняющей машиночитаемые инструкции, или располагать на удаленном месте, из которого машиночитаемые инструкции можно загружать по сети для исполнения.
Должно быть понятно, что вычислительная система 600 является только одним примером вычислительной системы и что вычислительная система 600 может иметь больше или меньше компонентов, чем показано, к ней могут быть присоединены дополнительные компоненты, не показанные в примере варианта осуществления из фиг. 6, и/или вычислительная система 600 может иметь конфигурацию или компоновку компонентов, отличающуюся от показанной на фиг. 6. Различные компоненты, показанные на фиг. 6, могут быть реализованы аппаратным обеспечением, программным обеспечением или сочетанием аппаратного обеспечения и программного обеспечения, в том числе одной или несколькими интегральными схемами обработки сигналов и/или специализированными интегральными схемами.
Кроме того, этапы в способах обработки, описанных выше (например, из фиг. 4), могут быть реализованы выполнением одного или нескольких функциональных модулей в устройствах обработки информации, таких как процессоры общего назначения, или в специализированных интегральных микросхемах, таких как интегральные схемы прикладной ориентации, вентильные матрицы, программируемые пользователем, системы на кристалле, программируемые логические устройства, или в других подходящих устройствах. Все эти модули, сочетания этих модулей и/или сочетание их с обычным аппаратным обеспечением включены в объем настоящего раскрытия.
Хотя выше были подробно описаны конкретные варианты осуществления раскрытия, описание предназначено только для иллюстрации. Различные модификации раскрытых аспектов примеров вариантов осуществления и эквивалентные этапы, соответствующие раскрытым аспектам, могут быть разработаны специалистами в соответствующей области техники в дополнение к описанным выше без отступления от сущности и объема изобретения, определенного в нижеследующей формуле изобретения, объем которой соответствует самой широкой интерпретации, так что охватывает такие модификации и эквивалентные структуры.
Изобретение относится к каротажу скважин. Сущность изобретения: проводят электромагнитные измерения фазового сдвига и затухания с использованием излучателя и приемника, магнитные моменты которых имеют направление, параллельное оси каротажного прибора, проводят электромагнитные измерения фазового сдвига и затухания с использованием излучателя и приемника, магнитные моменты которых имеют направление, косое к оси каротажного прибора, преобразуют измеренные фазовый сдвиг и затухание в эквивалентный отклик дипольной антенны, определяют горизонтальное удельное сопротивление пластов на основании измерений при параллельном направлении магнитных моментов с использованием модели пласта со слоистой структурой, определяют вертикальное удельное сопротивление, границы слоев пластов и углы падения пластов на основании измерений при косом направлении магнитных моментов. 2 н. и 14 з.п. ф-лы, 6 ил.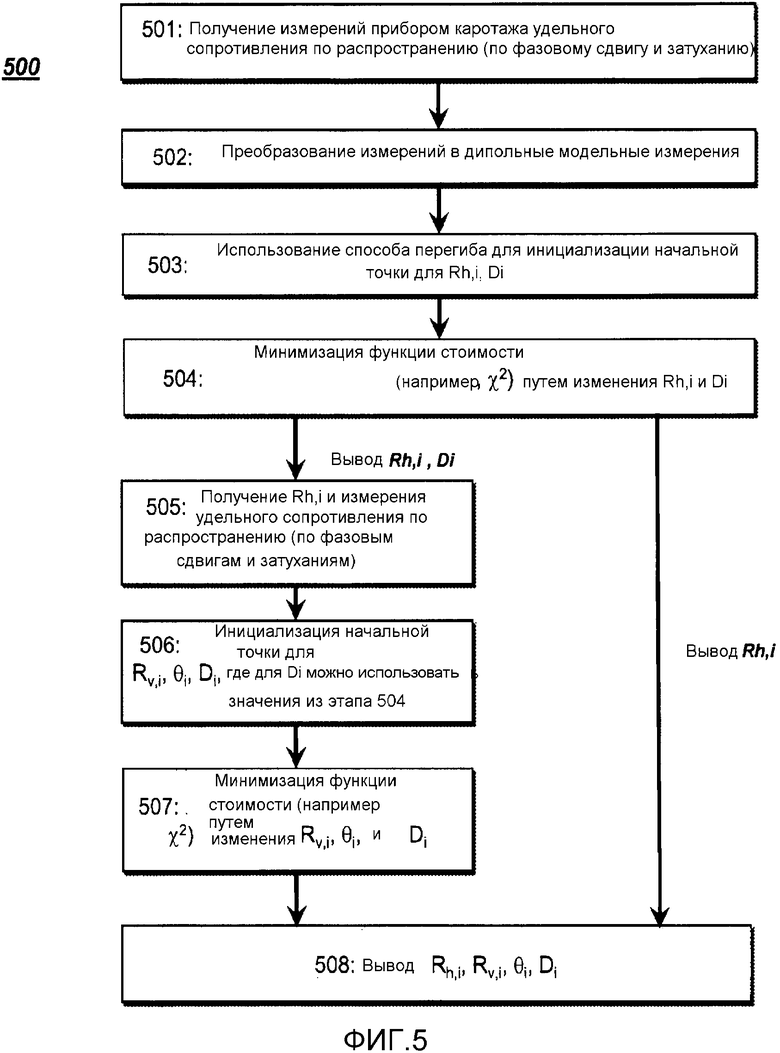
1. Способ каротажа подземных пластов, вскрываемых стволом скважины, содержащий этапы, на которых:
проводят электромагнитные измерения фазового сдвига и затухания с использованием излучателя и приемника, магнитные моменты которых имеют направление, параллельное оси каротажного прибора;
проводят электромагнитные измерения фазового сдвига и затухания с использованием излучателя и приемника, магнитные моменты которых имеют направление, косое к оси каротажного прибора;
преобразуют измеренные фазовый сдвиг и затухание в эквивалентный отклик дипольной антенны;
определяют горизонтальное удельное сопротивление пластов на основании измерений при параллельном направлении магнитных моментов с использованием модели пласта со слоистой структурой; и
определяют вертикальное удельное сопротивление, границы слоев пластов и углы падения пластов на основании измерений при косом направлении магнитных моментов.
2. Способ по п. 1, в котором измерения при параллельном направлении магнитных моментов или при косом направлении магнитных моментов содержат измерения электромагнитной индукции.
3. Способ по п. 2, в котором измерения выполняют при множестве расстояний между излучателем и приемником.
4. Способ по п. 2, в котором измерения выполняют на множестве частот.
5. Способ по п. 1, в котором измерения при параллельном направлении магнитных моментов или при косом направлении магнитных моментов содержат измерения распространения электромагнитных волн.
6. Способ по п. 5, в котором измерения выполняют при множестве расстояний между излучателем и приемником.
7. Способ по п. 5, в котором измерения выполняют на множестве частот.
8. Способ по п. 1, в котором определение вертикального удельного сопротивления пласта содержит:
определение исходной начальной точки для вертикального удельного сопротивления, угла падения и положений границ пластов на основании измерений при косой оси диполя; и
минимизацию функции стоимости путем изменения вертикального удельного сопротивления, угла падения и положений границ пластов.
9. Способ по п. 8, в котором исходное значение горизонтального удельного сопротивления и положения границ слоев пласта определяют на основании измерений при параллельном направлении магнитных моментов .
10. Способ определения горизонтального удельного сопротивления, вертикального удельного сопротивления и падения подземных пластов на основании электромагнитных измерений подземных пластов, содержащий этапы, при выполнении которых:
принимают для компьютерных измерений в качестве входных данных электромагнитные измерения фазового сдвига и затухания с использованием излучателя и приемника, магнитные моменты которых имеют направление, параллельное оси скважинного каротажного прибора;
принимают для компьютерных измерений в качестве входных данных электромагнитные измерения фазового сдвига и затухания с использованием излучателя и приемника, магнитные моменты которых имеют направление косой к оси скважинного каротажного прибора;
преобразуют измеренные фазовый сдвиг и затухания в эквивалентный отклик дипольной антенны;
посредством компьютера определяют горизонтальное удельное сопротивление на основании измерений при параллельном направлении магнитных моментов с использованием модели пласта со слоистой структурой; и
посредством компьютера определяют вертикальное удельное сопротивление и угол падения пластов на основании измерений при косом направлении магнитных моментов.
11. Способ по п. 10, в котором горизонтальные удельные сопротивления на основании измерений при параллельном направлении магнитных моментов используют в качестве исходных значений для процедуры инверсии, чтобы определять вертикальное удельное сопротивление и угол падения, используя измерения при косом направлении магнитных моментов.
12. Способ по п. 10, в котором измерения при параллельном направлении магнитных моментов и/или измерения при косом направлении магнитных моментов выполняют при множестве расстояний между излучателем и приемником.
13. Способ по п. 10, в котором измерения при параллельном направлении магнитных моментов и/или измерения при косом направлении магнитных моментов выполняют на множестве частот.
14. Способ по п. 10, в котором измерения при параллельном направлении магнитных моментов и/или измерения при косом направлении магнитных моментов содержат измерения распространения электромагнитных волн или измерения электромагнитной индукции.
15. Способ по п. 10, в котором определение вертикального удельного сопротивления пласта содержит:
определение исходной начальной точки для вертикального удельного сопротивления, угла падения и расстояния на основании измерений при косом направлении магнитных моментов; и
минимизацию функции стоимости путем изменения вертикального удельного сопротивления, угла падения и расстояния.
16. Способ по п. 10, в котором исходное значение горизонтального удельного сопротивления и положения границ слоев пласта определяют на основании измерений при параллельном направлении магнитных моментов.
| ДИВАН-КРОВАТЬ ИЛИ КРЕСЛО-КРОВАТЬ (ВАРИАНТЫ) И МЕХАНИЗМ ПОДЪЕМА СПИНКИ | 2006 |
|
RU2320251C2 |
| US 20110291855 А1, 01.12.2011 | |||
| US 20040046561 A1, 11.03.2004 | |||
| US 20050278122 A1, 15.12.2005 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ КАРОТАЖА С ИСПОЛЬЗОВАНИЕМ СИНФАЗНОЙ СОСТАВЛЯЮЩЕЙ МАГНИТНОГО ПОЛЯ ПО РЕЗУЛЬТАТАМ МНОГОКОМПОНЕНТНЫХ ИЗМЕРЕНИЙ УДЕЛЬНОГО СОПРОТИВЛЕНИЯ | 2004 |
|
RU2383038C2 |

