Настоящее изобретение относится к манипуляционному устройству для элементов разливочных желобов шахтной печи, а именно крышек главных желобов доменной печи.
Известно, что для того чтобы уменьшить выброс вредных веществ и уменьшить тепловое излучение в литейном дворе доменной печи, разливочный желоб (также называемый лоток или тигель) накрывают, по меньшей мере, одним съемным защитным элементом (крышкой). Такие крышки желобов представляют собой удлиненные металлические короба, снабженные изнутри огнеупорной футеровкой. Их размеры могут составлять несколько метров в длину и несколько метров в ширину, а масса может значительно превышать 10000 кг.
Тем не менее, для того чтобы открывать и закрывать разливочное отверстие, необходимо убирать верхнюю (в начале потока) крышку желоба, т.е. ту крышку желоба, которая расположена непосредственно под разливочным отверстием. Обычно верхнюю крышку желоба убирают в стояночное положение, а затем устанавливают обратно перед разливочным отверстием. Проведение таких операций затруднено ввиду обычных размеров и массы крышки желоба. Поэтому к настоящему времени было разработано несколько устройств, специально предназначенных для выполнения этой операции.
Патент US 4786250 описывает транспортное устройство для перемещения съемного кожуха (крышки) разливочного желоба с целью освобождения места для размещения оборудования для выпуска плавки и стопорения. Устройство включает в себя тележку, перемещающуюся по рельсам, подвесной и подъемный механизм, а также рамочную структуру, на которую укладываются рельсы. Подвесной и подъемный механизм для подъема и опускания кожуха устанавливается на тележку, которая может перемещаться по рельсам для транспортировки съемного кожуха.
Заявка WO 01/79565 описывает устройство для выполнения манипуляций с крышкой разливочного лотка (желоба) доменной печи. Оно включает в себя несущую конструкцию, расположенную примыкающей к лотку с главным опорным рычагом, соединенным с несущей конструкцией цилиндрическим сочленением. Вторичный манипулятор присоединяется к главному опорному рычагу, а несущий элемент ко второму опорному рычагу, каждое соответствующее сочленение является цилиндрическим. Трехстороннее и параллельное цилиндрическое сочленение устройства позволяет перемещать первую (по ходу потока) крышку, например, в направлении, параллельном плоскости крышки, в стояночное положение над расположенной ниже по ходу потока крышкой.
Патент DE 3933894 описывает поворотное и подъемное устройство для крышки желоба доменной печи. Устройство включает в себя вертикальную стойку, которая пристыковывается к разливочному отверстию и вращается вокруг продольной оси. К вертикальной стойке крепится консольный рычаг, свободный конец которого снабжен подъемным устройством со специальным приспособлением для подхвата крышки желоба.
Все известные устройства, указанные выше, имеют один общий недостаток - относительно ограниченная маневренность при установке и перемещении крышки желоба. Кроме того, они предназначены для работы с крышкой только отдельно взятого, одного желоба. Следовательно, при эксплуатации стандартной доменной печи, включающей в себя множество желобов, такие устройства приходится размещать у каждого желоба.
JP 10-317026 описывает устройство, принципиально аналогичное устройству, описанному в патенте DE 3933894, но предназначенное для обслуживания двух желобов, расположенных в разных местах. Таким образом, количество устройств, необходимых для доменной печи, в которой имеется несколько желобов, может быть уменьшено, что ведет к соответствующему сокращению затрат (см. Фиг.1 и Фиг.4 в JP 10-317026). Тем не менее, возможности по установке и манипулированию такой крышкой желоба, которая описывается в JP 10-317026, также ограничены.
Свободное пространство литейного двора, в котором можно размещать дополнительные устройства, обычно очень ограничено. Это - еще одна причина для уменьшения количества манипуляционных устройств. Из-за ограниченного пространства те стояночные положения, которые могут быть достигнуты устройствами из известного уровня техники, часто труднодоступны. Кроме того, эти известные устройства имеют относительно громоздкую конструкцию, и, как правило, требуется специальное приспособление для их крепления над полом литейного двора. Наконец, к главному желобу часто примыкают различные объекты, например, другое оборудование или неподвижные конструкции, которые необходимо обходить при перемещении крышки желоба из рабочего положения в стояночное положение.
Техническим результатом настоящего изобретения является создание манипуляционного устройства для элементов разливочных желобов, а именно для крышек желобов, способное совершать манипуляции с крышками нескольких желобов, имеющего компактную конструкцию и обеспечивающего высокую маневренность при установке и ориентации крышки желоба.
Для достижения технического результата настоящее изобретение предлагает манипуляционное устройство для элементов разливочных желобов шахтной печи, а именно для крышек желобов. Такое устройство включает в себя несущее основание, которое располагается на полу литейного двора доменной печи, сбоку от разливочного желоба, и раму, которая опирается на несущее основание и присоединяется к нему посредством подшипника, определяющего собой первую ось вращения, по существу вертикальную, вокруг которой рама может вращаться относительно несущего основания. Устройство дополнительно включает в себя подъемный рычаг, имеющий первый концевой участок и второй концевой участок, при этом первый концевой участок присоединен к раме посредством, по меньшей мере, первого поворотного сочленения, определяющего собой вторую ось вращения, по существу горизонтальную, вокруг которой подъемный рычаг может вращаться для того, чтобы опускать и поднимать второй концевой участок. Манипуляционный элемент присоединен ко второму концевому участку подъемного рычага посредством второго поворотного сочленения, определяющего собой третью ось вращения, которая лежит в плоскости, по существу перпендикулярной второй оси вращения, вокруг которой манипуляционный элемент может вращаться относительно подъемного рычага. Кроме того, манипуляционное устройство по настоящему изобретению включает в себя вилочный захват, соединенный с манипуляционным элементом и расположенный таким образом, чтобы обеспечивать захватывание, перемещение и опускание элементов желобов.
Такое устройство обеспечивает присоединение/отсоединение элемента желоба, такого, как крышка желоба, без дополнительного ручного вмешательства. Оно позволяет поднимать, перемещать из рабочего положения в стояночное положение и обратно и опускать такие элементы без использования дополнительных инструментов и операций. Кроме того, такое устройство обеспечивает высокую маневренность при установке и перемещении элементов желоба, а именно крышек желобов. В частности, это позволяет использовать одно устройство для обслуживания двух соседних желобов. Кроме того, такое устройство относительно универсально по месту своего монтажа. Оно может быть довольно легко автоматизировано, так как имеет конструкцию специализированной руки робота. Соответственно, можно добиться экономии трудовых затрат и повышения безопасности труда. Устройство является автономным, напольным и, за исключением несущего основания, не требует дополнительных точек крепления на литейном дворе. Оно может иметь относительно небольшую среднюю высоту, даже в полностью поднятом положении, так что может монтироваться под относительно невысокими служебными мостками.
По первому варианту осуществления изобретения рама включает в себя поворотный элемент, который соединен с рамой посредством третьего поворотного сочленения, определяющего собой четвертую ось вращения, которая параллельна второй оси вращения. При этом подъемный рычаг соединен с поворотным элементом таким образом, что подъемный рычаг может совершать движение вперед/назад относительно рамы.
По второму варианту осуществления изобретения манипуляционное устройство включает в себя прямолинейно скользящее сочленение, соединяющее вилочный захват с манипуляционным элементом таким образом, что вилочный захват может выполнять поступательное перемещение вперед/назад относительно подъемного рычага. Вместо того чтобы перемещать вперед/назад весь подъемный рычаг, в данном варианте осуществления изобретения перемещается только вилочный захват.
По третьему варианту осуществления изобретения манипуляционное устройство включает в себя первый подъемный штифт и второй подъемный штифт, прикрепленные по существу перпендикулярно к первому и второму зубцам вилочного захвата соответственно. Таким образом, манипуляционное устройство способно захватывать желобные элементы исключительно за счет вращения рамы вокруг первой оси вращения и/или вращения манипуляционного элемента вокруг третьей оси вращения. Следовательно, нет необходимости в перемещении вперед/назад вилочного захвата, в условиях, при которых такой вариант осуществления имеет достаточную маневренность.
Предпочтительно, чтобы манипуляционное устройство включало в себя первый гидравлический цилиндр, шарнирно соединенный с рамой и подъемным рычагом и предназначенный для подъема и опускания второго концевого участка подъемного рычага.
Для обеспечения большого угла поворота рамы манипуляционное устройство может включать в себя первый сервопривод, прикрепленный к раме, и первый зубчатый венец внутреннего зацепления, прикрепленный к несущему основанию и центрированный по первой оси вращения, при этом первый сервопривод включает в себя зубчатое колесо, находящееся в зацеплении с первым зубчатым венцом и предназначенное для вращения рамы относительно несущего основания. В таком случае манипуляционное устройство, первый сервопривод и первый зубчатый венец обеспечивают угол поворота рамы, по меньшей мере, в 200°.
В предпочтительной конструкции второго поворотного сочленения манипуляционное устройство имеет второй сервопривод, прикрепленный к подъемному рычагу, и второй зубчатый венец внутреннего зацепления, прикрепленный к манипуляционному элементу и центрированный по третьей оси вращения, при этом второй сервопривод включает в себя зубчатое колесо, находящееся в зацеплении со вторым зубчатым венцом и предназначенное для вращения манипуляционного элемента относительно подъемного рычага. При такой конструкции манипуляционное устройство, второй сервопривод и второй зубчатый венец обеспечивают угол поворота манипуляционного элемента приблизительно в 180°.
В первом варианте осуществления изобретения манипуляционное устройство предпочтительно включает в себя второй гидравлический цилиндр, шарнирно соединенный с рамой и поворотным элементом и предназначенный для перемещения вперед/назад подъемного рычага за счет вращения поворотного элемента.
Во втором варианте осуществления изобретения манипуляционное устройство предпочтительно включает в себя второй гидравлический цилиндр, соединенный с вилочным захватом и манипуляционным элементом и предназначенный для перемещения вперед/назад вилочного захвата.
Манипуляционное устройство по настоящему изобретению предназначено для использования в установке доменной печи с двумя расположенными недалеко друг от друга главными желобами, радиально выходящими из доменной печи, для удаления, помещения в стояночное положение, установки и/или замены двух крышек двух вышеуказанных желобов. При этом манипуляционное устройство устанавливается между этими двумя желобами.
Соответственно, настоящее изобретение также описывает установку доменной печи, включающую в себя манипуляционное устройство по настоящему изобретению и, по меньшей мере, два расположенных недалеко друг от друга разливочных желоба, отходящих в радиальном направлении от доменной печи. При этом несущее основание манипуляционного устройства располагают на полу литейного двора доменной печи по существу на линии биссектрисы угла, образованного продольными осями двух разливочных желобов. Предпочтительно, чтобы в такой установке ширина рабочего диапазона манипуляционного устройства превышала расстояние между первой осью вращения и центральной осью разливочных желобов. Кроме того, предпочтительно, чтобы несущее основание располагалось на полу литейного двора на расстоянии от наружного корпуса доменной печи, превышающем ширину рабочего диапазона манипуляционного устройства.
Краткое описание чертежей
Настоящее изобретение и его преимущества пояснены более подробно в следующем описании не ограничивающего числа вариантов осуществления со ссылкой на прилагаемые чертежи. На чертежах для обозначения одних и тех же или аналогичных элементов используются одни и те же цифры.
Фиг.1. Вид сбоку манипуляционного устройства по первому варианту осуществления;
Фиг.2. Вид сверху манипуляционного устройства, изображенного на Фиг.1;
Фиг.3. Продольное поперечное сечение по оси III-III Фиг.2, манипуляционное устройство находится в выдвинутом вперед положении;
Фиг.4. Продольное поперечное сечение по оси IV-IV Фиг.2, манипуляционное устройство находится в положении перемещения крышки желоба;
Фиг.5. Вид сверху пола литейного двора доменной печи с манипуляционным устройством, изображенным на Фиг.1, в разных положениях;
Фиг.6. Вид сбоку манипуляционного устройства по второму варианту осуществления;
Фиг.7. Вид сверху манипуляционного устройства по третьему варианту осуществления.
Подробное описание со ссылкой на чертежи
На Фиг.1 и 2 изображено манипуляционное устройство, обозначенное цифрой 10. Манипуляционное устройство 10 включает в себя несущее основание 12 и раму 14. Несущее основание 12 прикреплено к полу литейного двора соответствующими приспособлениями и служит устойчивой площадкой для размещения манипуляционного устройства 10. Рама 14 соединена с несущим основанием 12 посредством подшипника (описан ниже), определяющего собой первую ось вращения А, по существу вертикальную. Следовательно, рама 14 поддерживается несущим основанием 12 и вращается относительно него вокруг оси А. Специалистам будет понятно, что несущее основание 12 и рама 14 могут быть сконструированы таким образом, чтобы обеспечивать вращение на 360°. Угол поворота, однако, может быть ограничен конструктивными требованиями, например, необходимостью предотвращения столкновения с другими неподвижными конструкциями. Манипуляционное устройство 10 дополнительно включает в себя подъемный рычаг 16, который имеет первый концевой участок 18 и противоположный второй концевой участок 20. Первый концевой участок 18 подъемного рычага 16 соединен с рамой 14 посредством первого поворотного сочленения 22, определяющего собой вторую ось вращения В, по существу горизонтальную. Первое поворотное сочленение 22 имеет стандартную конструкцию, знакомую любому квалифицированному специалисту. Таким образом, подъемный рычаг 16 может вращаться вокруг оси В в вертикальной плоскости и предназначен для опускания и подъема второго концевого участка 20 в направлении стрелок 23. Манипуляционное устройство 10 также включает в себя манипуляционный элемент 24, соединенный со вторым концевым участком 20 подъемного рычага 16 посредством второго поворотного сочленения (описан ниже), определяющего собой третью ось вращения С, которая лежит в геометрической плоскости, перпендикулярной оси В, и проходит через ось А (на самом деле, ось С наклонена в этой плоскости за счет подъемного рычага 16, вращающегося вокруг оси В). Следовательно, манипуляционный элемент 24 вращается вокруг оси С относительно подъемного рычага 16 в направлении стрелок 25. Кроме того, манипуляционный элемент 24 может подниматься и опускаться в направлении стрелок 23, как описано выше. Вилочный захват 26 прикреплен к манипуляционному элементу 24 и предназначен для захватывания и удержания элементов разливочных желобов, в частности, крышек желобов.
Как видно из Фиг.1 и 2, рама 14 включает в себя поворотный элемент 28, участок нижнего конца которого соединяется с рамой 14 посредством третьего поворотного сочленения 30. Третье поворотное сочленение 30 имеет стандартную конструкцию, аналогичную конструкции поворотного сочленения 22, и определяет собой четвертую ось вращения D, параллельную оси В, т.е. по существу горизонтальную. Подъемный рычаг 16 соединяется с рамой 14 участком верхнего конца поворотного элемента 28. За счет вращения поворотного элемента 28 вокруг оси D подъемный рычаг 16 перемещается вперед/назад относительно рамы 14 в направлении стрелок 31.
Как далее видно из Фиг.1 и 2, манипуляционное устройство 10 включает в себя первый гидравлический цилиндр 32, предназначенный для подъема и опускания подъемного рычага 16. Нижний конец корпуса первого гидравлического цилиндра 32 шарнирно соединен с участком переднего конца рамы 14, а верхний конец его поршня шарнирно соединен с центральным участком подъемного рычага 16. Линия действия первого гидравлического цилиндра 32 лежит в плоскости, параллельной или компланарной с вышеуказанной плоскостью оси С (смотри разрез по оси III-III). Пределы хода первого гидравлического цилиндра 32 определяют пределы подъема и опускания в соответствии со стрелками 23. Манипуляционное устройство 10 дополнительно включает в себя второй гидравлический цилиндр 34, предназначенный для перемещения вперед/назад подъемного рычага 16. Нижний конец корпуса второго гидравлического цилиндра 34 шарнирно соединен с передним участком рамы 14, а верхний конец его поршня шарнирно соединен с центральным участком поворотного элемента 28. Второй гидравлический цилиндр 34 приводит в движение подъемный рычаг 16 за счет вращения поворотного элемента 28. Здесь также пределы перемещения в соответствии со стрелками 31 определяются конструкцией второго гидравлического цилиндра 34. При необходимости манипуляционное устройство 10 может быть сконструировано, в зависимости от общего хода гидравлических цилиндров 32, 34, полностью складным, т.е. складывающимся в такую конфигурацию, когда подъемный рычаг 16 лежит на верхнем краю рамы 14. Как можно видеть, подъемный рычаг 16 и рама 14 образуют, совместно с поворотным элементом 28 и гидравлическим цилиндром 32, кинематическую цепь, в которой рама 14 является неподвижным звеном. Такая цепь определяет ход для подъема и опускания в направлении стрелок 23 и перемещение вперед/назад в направлении стрелок 31.
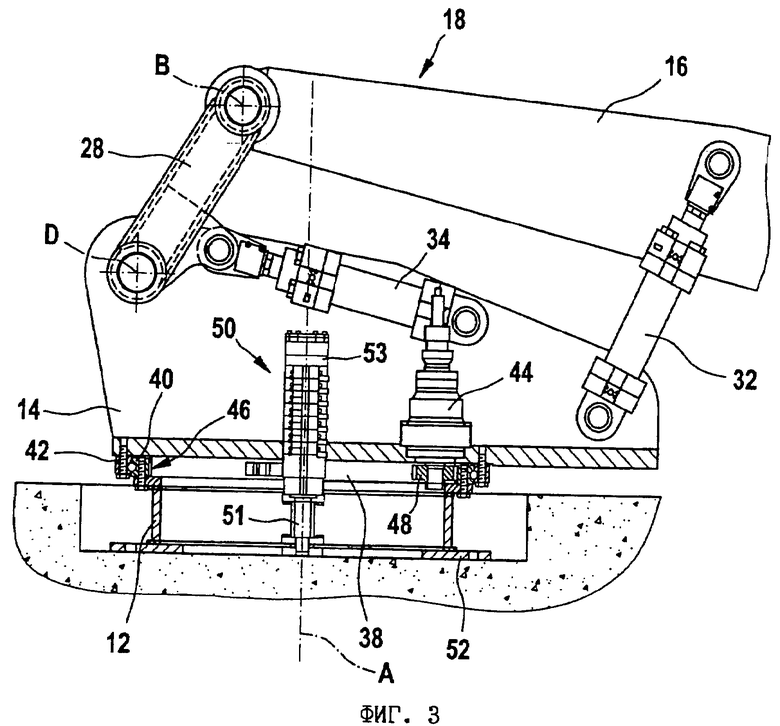
На Фиг.3 изображено манипуляционное устройство 10 в конфигурации, при которой подъемный рычаг 16 полностью выдвинут вперед, если сравнивать с Фиг.1 и 2. Это достигается за счет полного втягивания гидравлического цилиндра 34, который поворачивает поворотный элемент 28 в положение, изображенное на Фиг.3.
На Фиг.3 более подробно изображен подшипник 38, определяющий собой ось А. Подшипник 38 является роликовым, т.е. подшипником антифрикционного типа, и включает в себя внутреннюю обойму 40 и внешнюю обойму 42, между которыми находятся металлические шарики. Внутренняя обойма 40 прочно соединена с несущим основанием 12, тогда как внешняя обойма 42 прочно соединена с рамой 14. Обе обоймы 40, 42 расположены центрированно и коаксиально по оси А. Такое расположение позволяет подшипнику 38 выдерживать нагрузки, падающие на вытянутый вилочный захват 26, составляющие 20000 кг и более. На Фиг.3 также изображен первый сервопривод 44, прикрепленный к раме 14, и первый зубчатый венец 46, имеющий внутреннее зацепление и прикрепленный к несущему основанию 12, например, с помощью приваривания его к внутренней обойме 40. Сервопривод 44 и зубчатый венец 46 приводят в действие подшипник 38. Зубчатый венец 46 центрирован по первой оси вращения А. Сервопривод 44 закреплен внутри передней части рамы 14 и приводит в движение зубчатое колесо 48, находящееся в зацеплении с зубчатым венцом 46. Запуск сервопривода 44 обеспечивает вращение рамы 14, а также подъемного рычага 16, манипуляционного элемента 24 и вилочного захвата 26 вокруг оси А. Такое расположение сервопривода 44 и подшипника 38 позволяет поворачивать раму 14 на, примерно, 360° относительно несущего основания 12. Следует заметить, что манипуляционное устройство 10 предпочтительно включает в себя дополнительный сервопривод, закрепленный внутри рамы 14, аналогичный сервоприводу 44 и предназначенный для распределения нагрузки и создания запаса (избыточности) по мощности. Как будет понятно специалистам, установка первого сервопривода 44 внутри вращающейся рамы 14 и зубчатого венца 46 на несущем основании 12, а не наоборот, сокращает объем конструктивных изменений, необходимых на уровне пола литейного двора, и позволяет создать компактную конструкцию манипуляционного устройства 10.
На Фиг.3 далее изображена муфта 50 передачи мощности, предназначенная для передачи гидравлической и электрической мощности и управления от закрепленного несущего основания 12 на вращающуюся раму 14. Муфта 50 передачи мощности образует интерфейс для подвода питания и управления к первому и второму гидравлическим цилиндрам 32, 34 и первому сервоприводу 44 (а также второму сервоприводу 68, который будет описан далее). Муфта 50 передачи мощности включает в себя неподвижную ось 51, установленную на опорной плите 52 несущего основания 12, и втулку 53, вращающуюся вокруг оси 51. Следует заметить, что дополнительная функция оси 51 и втулки 53 заключается в герметичной передаче гидравлической жидкости от неподвижных элементов конструкции к подвижным.
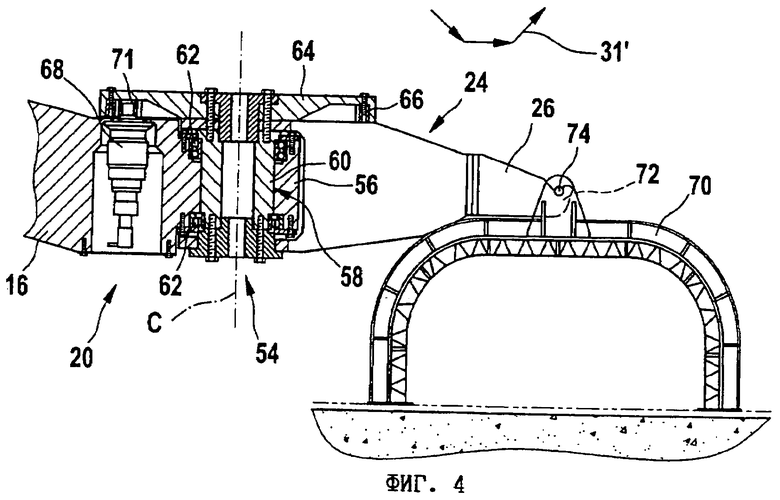
На Фиг.4 более подробно изображено второе поворотное сочленение 54, определяющее собой ось С. Если смотреть сверху, то второй концевой участок 20 подъемного рычага 16 напоминает брус автосцепки с прицепом, т.е. он сходит на конус в направлении закругленного наконечника (см. также Фиг.5). Наконечник второго концевого участка 20 сконструирован как опорная головка 56 для второго поворотного сочленения 54. Как видно из Фиг.4, несущая головка 56 имеет уменьшенную высоту в сравнении с остальной частью второго концевого участка 20. Несущая головка 56 имеет цилиндрическое сквозное отверстие, образуя втулку подшипника 58 для вала 60, который имеет цельную с ним верхнюю головку. Нижний фланец прикреплен снизу вала 60 и служит для его осевого крепления внутри втулки подшипника 58. Второе поворотное сочленение 54 дополнительно включает в себя верхний и нижний роликоподшипники 62, расположенные в соответствующих канавках, предусмотренных в несущей головке 56.
Как видно из Фиг.4, манипуляционный элемент 24 вращательно закреплен на валу 60. В своей верхней части манипуляционный элемент 24 включает в себя планшайбу 64, которая также крепится на валу 60. К защищенной внутренней стороне планшайбы 64 крепится второй зубчатый венец 66 внутреннего зацепления, центрированный по оси С. Второй сервопривод 68 закреплен в полости подъемного рычага 16 таким образом, что зубчатое колесо 70 на его ведущей оси входит в зацепление со вторым зубчатым венцом 66. Такое расположение приводит в действие второе поворотное сочленение 54, т.е. вращает манипуляционный элемент 24 относительно подъемного рычага 16. Благодаря описанной выше форме второго концевого участка 20 и форме манипуляционного элемента 24 манипуляционный элемент может поворачиваться вокруг оси С на угол главным образом в 180°.
Как видно из Фиг.4, описанная выше кинематическая цепь, включающая также в себя подъемный рычаг 16, устроена таким образом, что манипуляционный элемент 24, точнее - центральная ось вилочного захвата 26, имеет по существу горизонтальную ориентацию в той конфигурации, которая показана на Фиг.4. Таким образом, совершение движения по стрелкам 31' дает возможность взять крышку желоба 70 (показанную в разрезе на Фиг.4). По сути, в ходе такого движения оба зубца 72 вилочного захвата 26 подводятся под транспортные штыри 74, предусмотренные на крышке желоба 70, как видно из Фиг.4. Движение вперед в соответствии со стрелками 31' включает в себя опускание вилочного захвата 26 на некоторую величину за счет фиксированного радиуса поворотного элемента 28 и, если необходимо, за счет первого гидравлического цилиндра 32. В зависимости от положения манипуляционного устройства 10 и/или положения и ориентации крышки желоба 70, для правильного подведения зубцов 72 под транспортные штыри 74 могут потребоваться одно или более регулировочных движений манипуляционного элемента 24 (вокруг оси С) и/или рамы 14 (вокруг оси А). Когда вилочный захват 26 берет крышку желоба 70, как видно из Фиг.4, то она может быть поднята за счет выдвижения гидравлического цилиндра 32. Таким образом, крышку желоба 70 можно перенести в другое место, например, в стояночное положение за счет соответствующих вращений вокруг осей А, В, С и D. Возможны, безусловно, и движения в обратном направлении.
Фиг.5 представляет собой вид в плане различных положений манипуляционного устройства 10 по первому варианту осуществления изобретения в установке доменной печи. На Фиг.5 схематично показаны доменная печь 75 и первый и второй желоба 76, 78, расположенные поблизости друг от друга и выходящие радиально из доменной печи 75. Доменная печь 75 может включать в себя, например, еще два желоба и соответствующее им дополнительное манипуляционное устройство с противоположной стороны (не показаны). Первая крышка желоба 70 показана в рабочем положении 81 и в стояночном (гаражном) положении 82. Вторая крышка желоба 70' также показана в рабочем положении 83 и в гаражном положении 84. На Фиг.5 для каждого из положений 81, 82, 83 и 84 показано соответствующее положение манипуляционного устройства 10. Нет сомнений в том, что манипуляционное устройство 10 способно обслуживать множество других позиций в пределах своего рабочего диапазона в зависимости от реальной архитектуры установки доменной печи. Таким образом, одно единственное манипуляционное устройство 10 способно переносить как первую крышку желоба 70, так и вторую крышку желоба 70' из рабочего положения в гаражное и наоборот.
Как дополнительно видно из Фиг.5, манипуляционное устройство 10 расположено на полу доменного двора сбоку от крышек желобов 76, 78 и, по существу, на биссектрисе угла между центральными осями двух крышек желобов 76, 78. Кроме того, рабочий диапазон манипуляционного устройства 10 больше расстояния между осью вращения А и центральными осями крышек желобов 76, 78. Кроме того, несущее основание 12 манипуляционного устройства 10 установлено на таком расстоянии от наружного контура доменной печи 75, которое больше рабочего диапазона манипуляционного устройства 10. За счет этого совершенно исключается столкновение, например, с внешней стенкой печи. Как видно из Фиг.5 (в особенности, в позиции 82), манипуляционный элемент 24 может поворачиваться в свое предельное положение, в котором он находится под прямым углом, т.е. под углом 90° относительно подъемного рычага 16. Как будет понятно специалистам, описанная конфигурация обеспечивает поворот манипуляционного элемента 24 в диапазоне 180° даже вместе с переносимой крышкой желоба 70, 70'. Предпочтительно, чтобы ход подъема, обеспечиваемый гидравлическим цилиндром 32, обеспечивал высоту подъема на вилочном захвате 26, который превышает общую высоту крышки желоба. Такая мера обеспечивает, при необходимости, замену крышек желоба 70, 70', например, перемещая крышку желоба 70 непосредственно из позиции 81 в позицию 83.
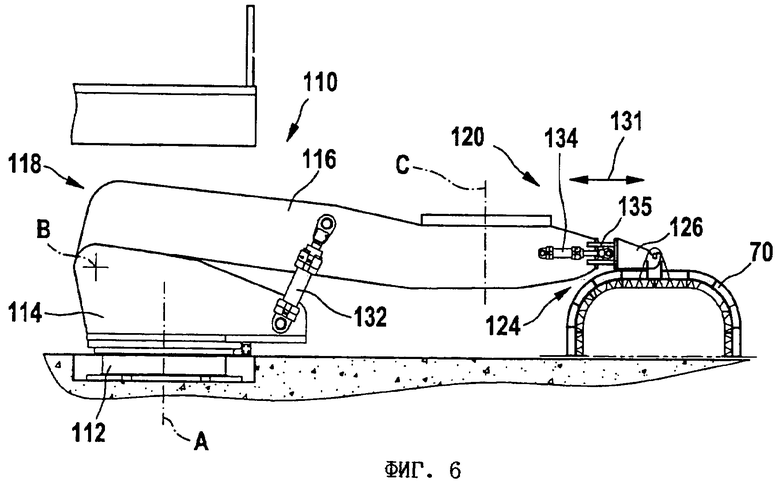
На Фиг.6 изображено манипуляционное устройство 110 по второму варианту осуществления изобретения. Для краткости ниже будут описаны только отличия второго варианта осуществления от вышеописанного первого. Действительно, манипуляционное устройство 110, изображенное на Фиг.6, в большинстве своих аспектов аналогично манипуляционному устройству 10. А именно оно также включает в себя несущее основание 112, раму 114, подъемный рычаг 116, имеющий первый и второй концевые участки 118, 120, и манипуляционный элемент 124, снабженный вилочным захватом 126. Манипуляционное устройство 120 включает в себя подшипник и поворотные сочленения, предназначенные для вращения или поворота вокруг соответствующих осей А, В и С. Как и в первом варианте осуществления, манипуляционное устройство 110 также включает в себя первый гидравлический цилиндр 132, предназначенный для подъема/опускания подъемного рычага 116 посредством поворота вокруг оси С. Основное отличие манипуляционного устройства 110 заключается в том, что рама 114 не снабжена поворотным элементом, вместо этого первый концевой участок 118 подъемного рычага 116 прямо присоединен к неподвижному корпусу рамы 114 по оси В. Тем не менее, манипуляционное устройство 110 предназначено для перемещения вилочного захвата 126 в соответствии со стрелками 131, как видно из Фиг.6. Второй концевой участок 120 включает в себя второй гидравлический цилиндр 134, предназначенный для движения вперед/назад в плоскости, перпендикулярной оси С, и в направлении выдвижения манипуляционного элемента 124. Как дополнительно видно из Фиг.6, вилочный захват 126 и манипуляционный элемент 124 устроены таким образом, что первый выдвигается относительно второго посредством прямолинейного скользящего сочленения 135. Второй гидравлический цилиндр 134 обеспечивает действие скользящего сочленения 135, т.е. управляет перемещением вперед/назад вилочного захвата 126 в соответствии со стрелками 131 относительно манипуляционного элемента 124 и подъемного рычага 116. Как будет понятно специалистам, манипуляционное устройство 110 по тому варианту, который изображен на Фиг.6, обладает аналогичными свойствами и обеспечивает по существу такие же преимущества, что и предыдущий описанный вариант осуществления изобретения.
На Фиг.7 изображено манипуляционное устройство 210 по третьему варианту осуществления изобретения. Ниже описаны только отличия от предыдущих вариантов осуществления изобретения. Аналогичные или идентичные детали обозначены на Фиг.7 теми же двумя последними цифрами, в то время как третья цифра (обозначающая сотни) увеличена на единицу. В то время как каждый из предыдущих описанных вариантов осуществления изобретения обладает одной линейной степенью подвижности (СП) (для перемещения вперед/назад) и тремя вращательными (поворотными) СП, манипуляционное устройство 210 обладает только тремя вращательными СП вокруг осей А, В и С. Таким образом, манипуляционное устройство 210 не имеет ни одной линейной СП. Вилочный захват 226 манипуляционного устройства 210 снабжен первым и вторым подъемными штырями 227 и 229, которые закреплены по существу перпендикулярно к зубцам 272. Вместо транспортных брусков крышки желобов 270, 270' под манипуляционное устройство 210 снабжены проушинами 273 с отверстиями под подъемные штыри 227 и 229 манипуляционного устройства 210. При такой конструкции манипуляционное устройство 210 способно поднимать, переносить и укладывать крышки желобов 270, 270' без линейной (вперед/назад) СП. Следовательно, манипуляционное устройство 210 имеет меньшую сложность и требует только одного гидравлического цилиндра 232, предлагая при этом гибкость позиционирования, сравнимую с предыдущими вариантами осуществления изобретения. Можно также отметить, что рама 214 манипуляционного устройства 210, равно как и рама 114, не имеет поворотного элемента.
Первым важным аспектом, который необходимо отметить, является пригодность манипуляционного устройства 10, 110, 210 для обслуживания двух соседних желобов доменной печи. Можно также видеть, что описанная конфигурация манипуляционных устройств 10, 110, 210 позволяет использовать их во многих различных архитектурах литейных дворов благодаря, среди прочего, большому разнообразию рабочих и стояночных положений, доступных для манипуляционного устройства. Благодаря своим конфигурационной гибкости и конструкции манипуляционное устройство 10, 110, 210 может быть смонтировано без особых изменений либо вообще без изменений в существующей компоновке. Многие манипуляционные устройства известного уровня техники имеют конструкцию наподобие консольного (козлового) крана, имеющего горизонтальную стрелу, опирающуюся и вращающуюся относительно вертикальной колонны. Чтобы такое манипуляционное устройство не опрокинулось, колонны известных устройств часто прикрепляются в своей верхней части к какой-либо прочной структуре, имеющейся на литейном дворе. Поскольку манипуляционное устройство 10, 110, 210 по настоящему изобретению напольного типа, оно может легко монтироваться во многих разных местах литейного двора вне зависимости от компоновки и архитектуры последнего. Так как манипуляционное устройство 10, 110, 210 может быть установлено на некотором расстоянии от доменной печи и литьевых желобов, оно не представляет собой помехи и преграды для принадлежностей выпуска, заглушки и прочего оборудования, которое необходимо вблизи выпускного отверстия (летки) печи или литьевого желоба. Кроме того, манипуляционное устройство 10, 110, 210 способно обходить препятствия в виде газовых вытяжек и трубопроводов, даже при перемещении тяжелой и громоздкой крышки желоба.
Другим важным аспектом, который необходимо отметить, является пригодность манипуляционного устройства 10, 110, 210 для автоматизации процесса, например, полностью автоматического удаления и установки двух крышек желобов (70, 70') до и после выпуска или установки заглушки в летку доменной печи. Действительно, в минимальном варианте осуществления манипуляционное устройство 210 представляет собой специально сконструированный вариант руки робота, наподобие робота в полярных координатах (вокруг осей А и В), лишенного СП вращения кисти и снабженного захватным устройством, имеющим одну СП (вокруг оси С). В первых двух предпочтительных вариантах осуществления 10, 110 к захватному устройству (т.е. манипуляционному элементу 24) добавлена еще одна СП, т.е. движение (перемещение) вперед/назад (по стрелкам 31, 131). Соответственно, манипуляционное устройство 10, 110, 210 прекрасно подходит для автоматического выполнения операций, которые хорошо известны умелому работнику. Тем не менее, не исключена возможность оборудования манипуляционного устройства 10, 110, 210 под ручное управление.
Наконец, хотя манипуляционное устройство 10, 110, 210 было описано в контексте переноса крышки первого (по ходу потока) разливочного желоба, т.е. основного разливочного желоба доменной печи, но не исключено, что устройство можно использовать для перемещения других элементов желоба, например, крышки основного нижнего (по ходу потока) желоба или принадлежностей чугунного или шлакового желобов. Кроме того, угловые значения, приведенные в предпочтительных вариантах осуществления, могут отличаться от значений в других вариантах осуществления настоящего изобретения. Таким образом, там, где такие термины, как вертикальный, горизонтальный, перпендикулярный, параллельный и т.д., используются для описания предпочтительных вариантов осуществления, специалистам должно быть понятно, что, в зависимости от местных условий, отклонение на несколько угловых градусов (°) или даже до 30° от такого углового значения может быть возможно или даже необходимо без выхода за пределы концепции манипуляционного устройства по настоящему изобретению.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР ДЛЯ КРЫШЕК РАЗЛИВОЧНЫХ ЖЕЛОБОВ | 2013 |
|
RU2561632C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ЖЕЛОБА | 2006 |
|
RU2368665C2 |
| Устройство для обслуживания распределительного желоба доменной печи и устройство для замены распределительного желоба | 1989 |
|
SU1836435A3 |
| КОЛОШНИКОВЫЙ ЗАТВОР ДЛЯ ШАХТНЫХ ПЕЧЕЙ | 1999 |
|
RU2237724C2 |
| ПЕРЕМЕЩАЮЩЕЕСЯ УСТРОЙСТВО ДЛЯ ЗАМЕНЫ ВЫПУСКНОГО ЖЕЛОБА | 2005 |
|
RU2368664C2 |
| МАНИПУЛЯТОР ДЛЯ УКЛАДКИ ДОРОЖНЫХ БОРДЮРОВ И ПЛИТКИ | 2024 |
|
RU2837513C1 |
| МОДУЛЬНЫЙ МАНИПУЛЯЦИОННЫЙ РОБОТ, ПРЕДНАЗНАЧЕННЫЙ ДЛЯ ИСПОЛЬЗОВАНИЯ В ОБРАЗОВАТЕЛЬНЫХ ЦЕЛЯХ | 2023 |
|
RU2806952C1 |
| УСТРОЙСТВО ДЛЯ РАЗЛИВКИ МАТЕРИАЛА В РАСПЛАВЛЕННОМ СОСТОЯНИИ | 2009 |
|
RU2490330C2 |
| УСТРОЙСТВО ДЛЯ РАСПРЕДЕЛЕНИЯ СЫПУЧЕГО МАТЕРИАЛА С РАСПРЕДЕЛИТЕЛЬНЫМ ЖЕЛОБОМ, ПОДДЕРЖИВАЕМЫМ КАРДАННЫМ ПОДВЕСОМ | 2011 |
|
RU2542954C2 |
| Устройство для механизации ремонтных работ преимущественно на литейном дворе доменной печи | 1987 |
|
SU1468915A1 |




Настоящее изобретение относится к области металлургии, в частности к манипуляционному устройству, предназначенному для элементов разливочных желобов доменной печи. Устройство содержит несущее основание, расположенное на полу литейного двора доменной печи, сбоку от разливочного желоба, и раму, которая опирается на несущее основание и соединена с ним посредством подшипника, определяющего собой первую ось вращения, расположенную вертикально. Рама установлена с возможностью вращения вокруг первой оси вращения относительно несущего основания. Устройство дополнительно включает в себя подъемный рычаг, имеющий первый концевой участок и второй концевой участок. Первый концевой участок соединен с рамой посредством первого поворотного сочленения, определяющего собой вторую ось вращения, расположенную горизонтально. Манипуляционный элемент соединен со вторым концевым участком подъемного рычага посредством второго поворотного сочленения, определяющего собой третью ось вращения, которая лежит в плоскости, перпендикулярной второй оси вращения. Использование изобретения обеспечивает компактность и маневренность устройства. 4 н. и 18 з.п. ф-лы, 7 ил.
1. Манипуляционное устройство (10) для элементов разливочных желобов шахтной печи, а именно для крышек желобов (70, 70') установки доменной печи, включающее несущее основание (12), расположенное сбоку от вышеуказанного разливочного желоба, раму (14), которая поддерживается вышеуказанным несущим основанием (12) и соединена с ним посредством подшипника (38), определяющего собой первую ось вращения (А), расположенную, по существу, вертикально, причем вышеуказанная рама (14) установлена с возможностью вращения вокруг первой оси вращения относительно вышеуказанного несущего основания (12), подъемный рычаг (16), имеющий первый концевой участок (18) и второй концевой участок (20), при этом вышеуказанный первый концевой участок (18) соединен с вышеуказанной рамой (14) посредством по меньшей мере первого поворотного сочленения (22), определяющего собой вторую ось вращения (В), расположенную, по существу, горизонтально, причем вышеуказанный подъемный рычаг (16) установлен с возможностью поворота вокруг второй оси вращения для опускания и подъема его второго концевого участка (20), манипуляционный элемент (24), соединенный с вышеуказанным вторым концевым участком (20) вышеуказанного подъемного рычага (16) посредством второго поворотного сочленения (54), определяющего собой третью ось вращения (С), которая лежит в плоскости, по существу, перпендикулярно вышеуказанной второй оси вращения (В), причем вышеуказанный манипуляционный элемент (24) выполнен с возможностью поворота относительно вышеуказанного подъемного рычага (16) вокруг второй оси вращения (В), и вилочный захват (26), соединенный с вышеуказанным манипуляционным элементом (24) и расположенный с возможностью захватывания, перемещения и опускания элементов разливочных желобов.
2. Манипуляционное устройство по п.1, в котором вышеуказанная рама (14) включает поворотный элемент (28), при этом вышеуказанный поворотный элемент (28) соединен с вышеуказанной рамой (14) посредством третьего поворотного сочленения (30), определяющего собой четвертую ось вращения (D), параллельную вышеуказанной второй оси вращения (В), и в котором вышеуказанный подъемный рычаг (16) соединен с вышеуказанным поворотным элементом (28) с возможностью выполнения вышеуказанным подъемным рычагом (16) перемещения вперед/назад относительно вышеуказанной рамы (14).
3. Манипуляционное устройство по п.2, которое дополнительно включает второй гидравлический цилиндр (34), шарнирно соединенный с вышеуказанной рамой (14) и вышеуказанным поворотным элементом (28) и предназначенный для выполнения вышеуказанного перемещения вперед/назад вышеуказанного подъемного рычага (16) за счет вращения вышеуказанного поворотного элемента (28).
4. Манипуляционное устройство по п.1, которое дополнительно включает прямолинейно скользящее сочленение (135), соединяющее вышеуказанный вилочный захват (126) с вышеуказанным манипуляционным элементом (124) таким образом, что вышеуказанный вилочный захват (126) может перемещаться вперед/назад относительно вышеуказанного подъемного рычага (116).
5. Манипуляционное устройство по п.4, которое дополнительно включает второй гидравлический цилиндр (134), соединенный с вышеуказанным вилочным захватом (26) и вышеуказанным манипуляционным элементом (24) и предназначенный для выполнения вышеуказанного перемещения вперед/назад вышеуказанного вилочного захвата (26).
6. Манипуляционное устройство по п.1, которое дополнительно включает первый подъемный штырь (227) и второй подъемный штырь (229), при этом указанные первый и второй подъемные штыри (227, 229) прикреплены, по существу, перпендикулярно к первому и второму зубцам (272) вышеуказанного вилочного захвата (226) соответственно таким образом, что вышеуказанное манипуляционное устройство (210) выполнено с возможностью захвата элементов разливочных желобов за счет вращения вышеуказанной рамы (214) вокруг первой оси вращения и/или вращения вышеуказанного манипуляционного элемента (222) вокруг третьей оси вращения.
7. Манипуляционное устройство по любому из пп.1-6, которое дополнительно включает первый гидравлический цилиндр (32), шарнирно соединенный с вышеуказанной рамой (14) и вышеуказанным подъемным рычагом (16) и предназначенный для подъема или опускания вышеуказанного второго концевого участка (20) вышеуказанного подъемного рычага (16).
8. Манипуляционное устройство по любому из пп.1-6, которое дополнительно включает первый сервопривод (44), прикрепленный к вышеуказанной раме (14), и первый зубчатый венец (46) внутреннего зацепления, прикрепленный к вышеуказанному несущему основанию (12) и центрированный по первой оси вращения (А), при этом вышеуказанный первый сервопривод (44) включает в себя зубчатое колесо (48), входящее в зацепление с первым зубчатым венцом (46) и предназначенное для вращения вышеуказанной рамы (14) относительно вышеуказанного несущего основания (12).
9. Манипуляционное устройство по п.8, в котором вышеуказанное манипуляционное устройство (10), вышеуказанный первый сервопривод (44) и вышеуказанный первый зубчатый венец (46) обеспечивают поворот вышеуказанной рамы (14) на угол по меньшей мере равный 200°.
10. Манипуляционное устройство по п.8, которое дополнительно включает второй сервопривод (68), прикрепленный к вышеуказанному подъемному рычагу (16), и второй зубчатый венец (66) внутреннего зацепления, прикрепленный к вышеуказанному манипуляционному элементу (24) и центрированный по вышеуказанной третьей оси вращения (С), при этом второй сервопривод (68) включает в себя зубчатое колесо (71), входящее в зацепление со вторым зубчатым венцом (66) и предназначенное для вращения вышеуказанного манипуляционного элемента (24) относительно вышеуказанного подъемного рычага (16).
11. Манипуляционное устройство по п.10, в котором вышеуказанное манипуляционное устройство (10), вышеуказанный второй сервопривод (68) и вышеуказанный второй зубчатый венец (66) обеспечивают поворот вышеуказанного манипуляционного элемента (24) на угол приблизительно 180°.
12. Манипуляционное устройство по п.7, которое дополнительно включает первый сервопривод (44), прикрепленный к вышеуказанной раме (14), и первый зубчатый венец (46) внутреннего зацепления, прикрепленный к вышеуказанному несущему основанию (12) и центрированный по первой оси вращения (А), при этом вышеуказанный первый сервопривод (44) включает в себя зубчатое колесо (48), входящее в зацепление с первым зубчатым венцом (46) и предназначенное для вращения вышеуказанной рамы (14) относительно вышеуказанного несущего основания (12).
13. Манипуляционное устройство по п.12, в котором вышеуказанное манипуляционное устройство (10), вышеуказанный первый сервопривод (44) и вышеуказанный первый зубчатый венец (46) обеспечивают поворот вышеуказанной рамы (14) на угол по меньшей мере равный 200°.
14. Манипуляционное устройство по п.13, которое дополнительно включает второй сервопривод (68), прикрепленный к вышеуказанному подъемному рычагу (16), и второй зубчатый венец внутреннего зацепления (66), прикрепленный к вышеуказанному манипуляционному элементу (24) и центрированный по вышеуказанной третьей оси вращения (С), при этом второй сервопривод (68) включает в себя зубчатое колесо (71), входящее в зацепление со вторым зубчатым венцом (66) и предназначенное для вращения вышеуказанного манипуляционного элемента (24) относительно вышеуказанного подъемного рычага (16).
15. Манипуляционное устройство по п.14, в котором вышеуказанное манипуляционное устройство (10), вышеуказанный второй сервопривод (68) и вышеуказанный второй зубчатый венец (66) обеспечивают поворот вышеуказанного манипуляционного элемента (24) на угол приблизительно равный 180°.
16. Установка доменной печи с манипуляционным устройством (10, 110, 210) по любому из пп.1-6 и по меньшей мере двумя соседними главными разливочными желобами (76, 78), расположенными отходящими в радиальном направлении от вышеуказанной доменной печи (75), причем вышеуказанное несущее основание (12) расположено на полу литейного двора вышеуказанной установки доменной печи, по существу, на линии биссектрисы угла, образованного двумя вышеуказанными разливочными желобами.
17. Установка по п.16, в которой рабочий диапазон вышеуказанного манипуляционного устройства (10, 110, 210) превышает расстояние между вышеуказанной первой осью вращения (А) и центральными осями вышеуказанных разливочных желобов (76, 78).
18. Установка по п.17, в которой вышеуказанное несущее основание (12) расположено на полу литейного двора на расстоянии от наружного корпуса вышеуказанной доменной печи (75), превышающем рабочий диапазон вышеуказанного манипуляционного устройства (10, 110, 210).
19. Установка доменной печи с манипуляционным устройством (10, 110, 210) по п.15 и по меньшей мере двумя соседними главными разливочными желобами (76, 78), расположенными отходящими в радиальном направлении от вышеуказанной доменной печи (75), причем вышеуказанное несущее основание (12) расположено на полу литейного двора вышеуказанной установки доменной печи, по существу, на линии биссектрисы угла, образованного двумя вышеуказанными разливочными желобами.
20. Установка по п.19, в которой рабочий диапазон вышеуказанного манипуляционного устройства (10, 110, 210) превышает расстояние между вышеуказанной первой осью вращения (А) и центральной осью вышеуказанных разливочных желобов (76, 78).
21. Установка по п.20, в которой вышеуказанное несущее основание (12) расположено на полу литейного двора на расстоянии от наружного корпуса вышеуказанной доменной печи (75), превышающем рабочий диапазон вышеуказанного манипуляционного устройства (10, 110, 210).
22. Установка доменной печи с манипуляционным устройством (10, 110, 210) по любому из пп.1-6 и по меньшей мере двумя соседними главными разливочными желобами (76, 78), расположенными отходящими в радиальном направлении от вышеуказанной доменной печи (75), в которой манипуляционное устройство (10, 110, 210) размещено между двумя соседними главными разливочными желобами (76, 78) и предназначено для снятия, перемещения в стояночное положение, установки на место и/или замены обеих крышек (70, 70') двух соседних главных разливочных желобов (76, 78) установки доменной печи.
| JP 10317026 А, 02.12.1998 | |||
| DE 3933894 А1, 18.04.1991 | |||
| ЗУБЧАТАЯ ПЕРЕДАЧА С ПЕРЕМЕННЫМ УГЛОМ МЕЖДУ ОСЯМИ | 0 |
|
SU179565A1 |
| RU 97120693 А, 10.01.1999 | |||
| СПОСОБ ТРАНСПОРТИРОВКИ РАСПЛАВЛЕННОГО МЕТАЛЛА ОТ МЕТАЛЛУРГИЧЕСКОЙ ПЕЧИ В РАЗЛИВОЧНЫЕ ЕМКОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2044776C1 |

