Область техники, к которой относится изобретение
Изобретение относиться к области робототехники, в частности к роботам-манипуляторам, предназначенным для использования в учебном процессе для обучения робототехнике.
Уровень техники
Из существующего уровня техники известны различные конструкции учебных роботов, в том числе манипуляционных. Данные модели предназначены для использования в образовательных и исследовательских целях. Некоторые из существующих моделей обладают при этом модульной конструкцией что позволяет изменять конфигурацию этих роботов в ходе учебного процесса.
Известен учебный робот по патенту на изобретение RU 2745228 C2, опубл. 22.03.2021. Сущностью является робот, с соединяемыми друг с другом модулями для применения в сфере образования. Данные модули могут быть собраны в различные конфигурации, в том числе относящиеся к манипуляционным роботам. Конструкция модульных шарниров данного устройства подразумевает использование нескольких электродвигателей и конструктивных элементов, образующих зубчатую передачу, интегрированную в корпус шарнира. При этом в корпусе шарнира также устанавливаются различные функциональные блоки, содержащие в себе электронные компоненты для питания и управления шарниром.
Известен робот по патенту US 5293107 A, опубл. 08.03.1994, сущностью которого является манипуляционный робот, состоящий из ряда конструктивных элементов, шарнирно соединённых друг с другом. При этом электроприводы с планетарными редукторами интегрированы в конструкцию шарнира таким образом, что корпуса ротора и статора, содержащие в себе зубчатые колеса планетарного редуктора, соединяются с другими конструктивными элементами робота при помощи болтов.
Недостатками данных решений является необходимость использования специально изготовленных деталей электропривода и планетарных редукторов. Это значительно повышает трудоемкость изготовления и себестоимость подобного робота. При этом возможность использования готовых сервоприводов фабричного производства, а также широкодоступных конструктивных элементов отсутствует. Нет возможности производить быструю сборку и разборку робота, менять его конфигурацию. Также отсутствие каких-либо балансировочных приспособлений приводит к повышенным требованиям к мощности приводов и соответствующему их усложнению и удорожанию. Помимо этого, возможность изготовления конструктивных элементов пользователями в ходе учебного процесса путем использования аддитивных производственных технологии, в частности с помощью широкодоступных бюджетных 3D-принтеров, также отсутствует. Указанные недостатки существенно ограничивает возможность массового использования данных учебных роботов в образовательных учреждениях и спектр возможных функциональных применений в учебном процессе.
Сущность изобретения
Технической задачей, стоящей перед изобретением, является создание универсального робота, позволяющего осуществлять его быструю сборку и разборку, обладающего надежностью, простотой изготовления и возможностью создания различных конфигураций манипуляционных роботов для выполнения различных учебных задач.
Техническим результатом изобретения является обеспечение быстрой сборки и разборки робота, универсальность, возможность создания различных конфигураций манипуляционных роботов в ходе выполнения различных учебных задач, обеспечение надежности его работы и снижение трудоемкости изготовления.
Техническая задача решается, а технический результат достигается за счёт того, что модульный манипуляционный робот содержит поворотное основание, закрепляемое на опорной поверхности, и модульную механическую цепь с изменяемой геометрией, состоящую из по меньшей мере двух звеньев, соединенных при помощи многошарнирных сочленений, которая одним концом подвижно соединена с поворотным основанием, а другой ее конец свободен и выполнен с возможностью присоединения сменного концевого инструмента, причем первое многошарнирное сочленение соединено с поворотным основанием и первым звеном, последнее многошарнирное сочленение соединено с креплением концевого инструмента и последним звеном, а звенья соединены между собой по меньшей мере одним средним многошарнирным сочленением, при этом каждое звено выполнено в виде параллелограмма, длинные стороны которого образованы двумя стержнями произвольной одинаковой длины, на концах которых выполнены шарниры-опоры, а короткие - корпусом многошарнирных сочленений, при этом каждое многошарнирное сочленение представляет собой корпус, состоящий из двух половин, соединенных крепежными элементами, в котором выполнены гнезда для шарниров стержней звена, при этом каждое звено содержит по меньшей мере одну балансировочную пружину и электропривод, закрепленный на корпусе многошарнирного сочленения.
Кроме того, первое многошарнирное сочленение, соединяющее поворотное основание и первое звено, содержит два гнезда под шарниры стержней.
Кроме того, последнее многошарнирное сочленение, соединяющее последнее звено и крепление для концевого инструмента, содержит три гнезда, два из которых под шарниры стержней, а одно под крепление концевого инструмента.
Кроме того, среднее многошарнирное сочленение, соединяющее звенья между собой, содержит четыре гнезда, два из которых под шарниры стержней одного звена, а два других под шарниры стержней другого звена.
Кроме того, один из стержней звена на обоих своих концах содержит шарниры-опоры, включающие подшипники качения с внешними кольцами, прикрепленные к стержням с помощью втулок, и устанавливаемые в гнезда, образованные корпусными деталями.
Кроме того, на одном из концов стержня установлена опора, включающая в себя втулку, подшипник качения с внешним кольцом, и фланец для крепления на валу привода предыдущего звена.
Кроме того, внешние кольца подшипников качения закреплены в гнездах с помощью уступов в корпусных деталях и зажаты в гнездах при помощи стягивающих элементов крепления.
Кроме того, электропривод закреплен на корпусе многошарнирного сочленения таким образом, что ось электропривода совпадает с осью гнезда и осью шарнира-опоры стержня.
Кроме того, пружина с обоих своих концов имеет зацепы, закрепляемые на втулках, выполненных на элементах звена.
Кроме того, один конец пружины закреплен на втулке, выполненной в корпусе многошарнирного сочленения или на оси шарнира стержня, а второй конец пружины закреплен на втулке, выполненной в корпусе одного из стержней.
Краткое описание чертежей
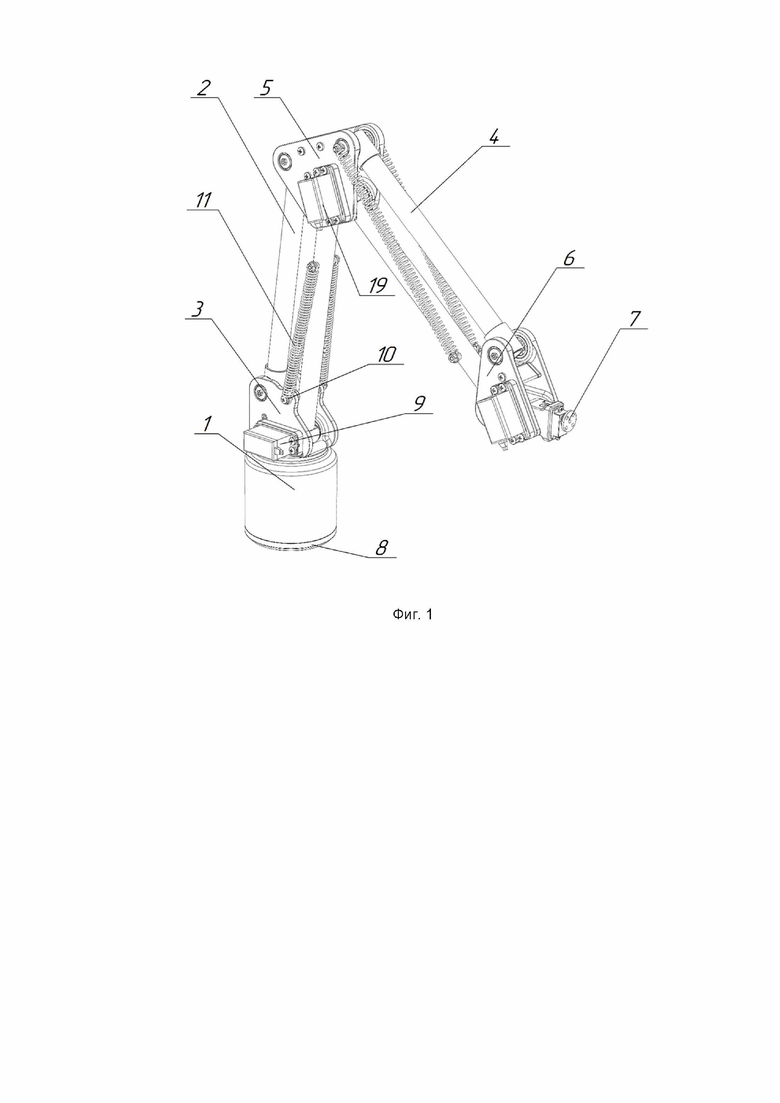
На Фиг. 1 показан пример осуществления устройства в конфигурации с двумя звеньями;
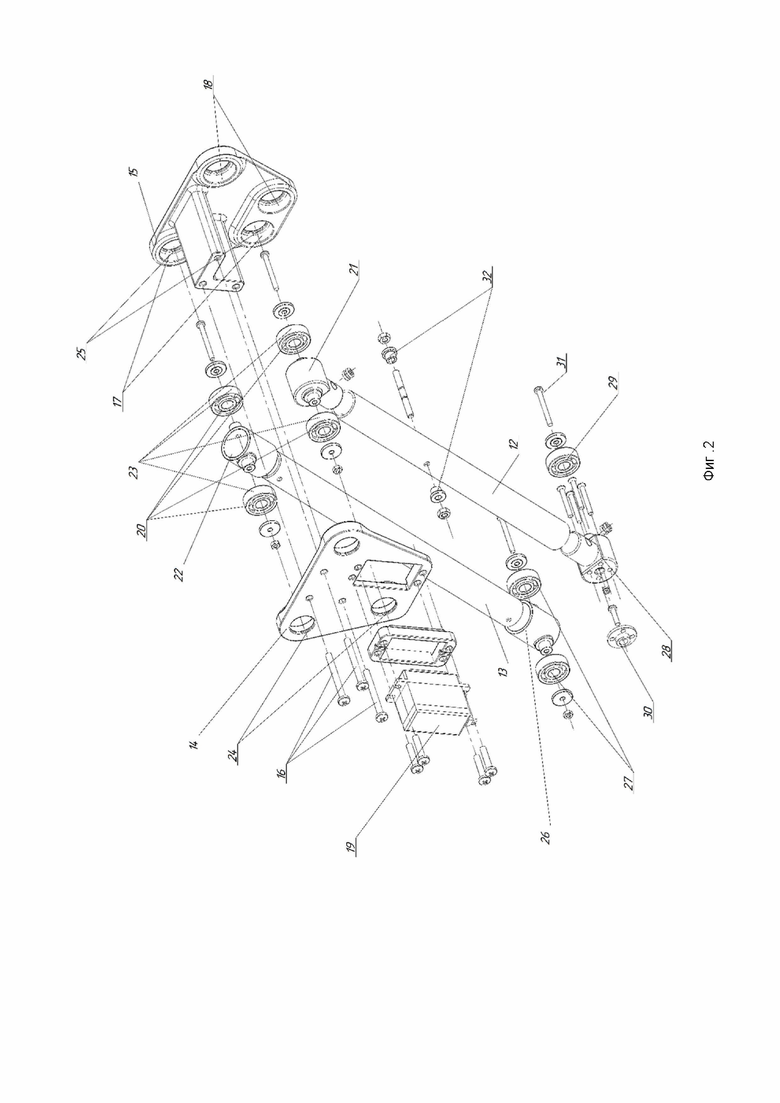
На Фиг. 2 показан вид второго звена в аксонометрии с покомпонентным разделением деталей;
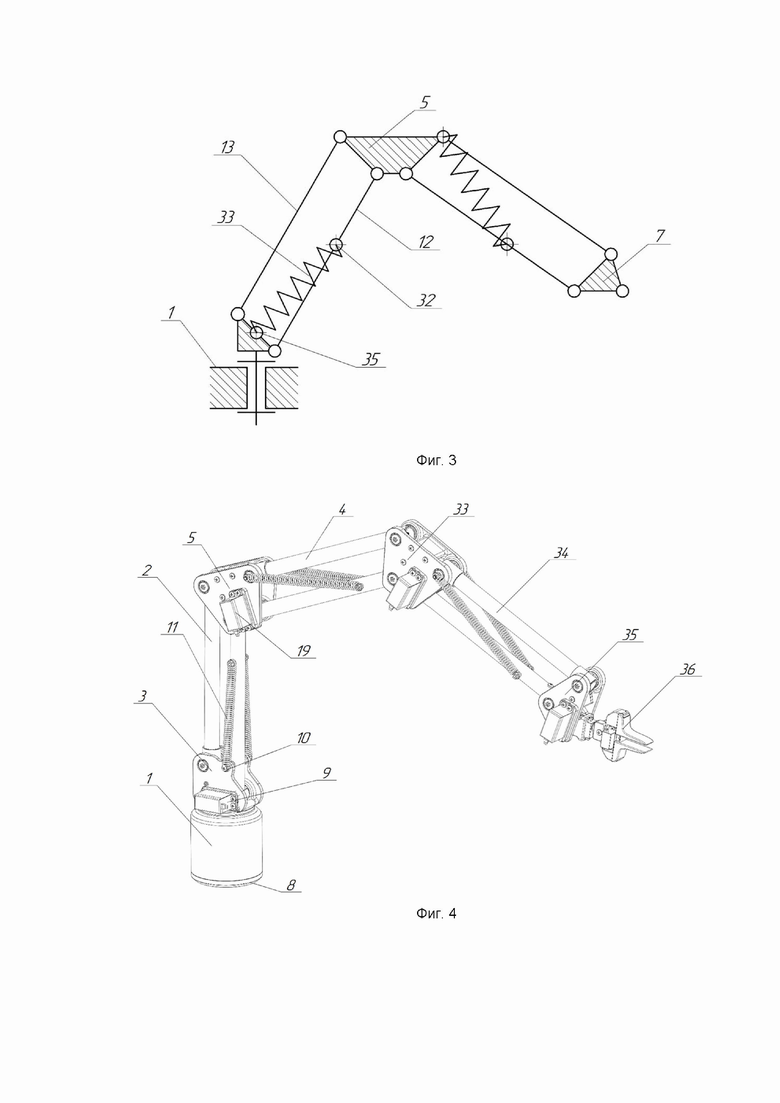
На Фиг. 3 показана кинематическая схема устройства, собранного в конфигурации с двумя звеньями;
На фиг. 4 показан пример осуществления устройства в конфигурации с тремя звеньями и концевым инструментом.
Осуществление изобретения
Заявленное устройство представляет собой учебный модульный манипуляционный робот, предназначенный для применения в образовательных целях. Цель его использования - научиться осуществлять на практике различные этапы конструирования, программирования и эксплуатации манипуляционных роботов и/или осуществлять связанные с ними эксперименты. Устройство предназначено для применения в образовательных учреждениях, например в школах, центрах технического творчества, кружках робототехники и т.д.
Учебный манипуляционный робот представляет из себя многозвенный манипулятор антропоморфного типа, который содержит поворотное основание, монтируемое на неподвижной либо подвижной опорной поверхности (платформе), и модульную механическую цепь с изменяемой геометрией, состоящую из по меньшей мере двух звеньев, соединенных при помощи многошарнирного сочленения, которая одним концом подвижно соединена с основанием манипулятора, а другой ее конец свободен и выполнен с возможностью присоединения сменного концевого инструмента и его использования для изменения положения и ориентации в пространстве. Данная механическая цепь позволяет при помощи движения ограниченной амплитуды перемещать и ориентировать концевой инструмент.
Конструкция, по сути, содержит по меньшей мере три многошарнирных сочленений и, соответственно, по меньшей мере два звена, образованных между ними, а также поворотное основание и крепление под концевой инструмент.
Первое многошарнирное сочленение соединено с поворотным основанием и первым звеном, последнее многошарнирное сочленение соединено с концевым инструментом и последним звеном, звенья соединены между собой по меньшей мере одним средним многошарнирным сочленением. При наличии двух звеньев в конструкции предусмотрено одно среднее многошарнирное сочленение, при наличии трех звеньев, соответственно между ними, предусмотрено два средних многошарнирных сочленения.
Конфигурация и число звеньев механической цепи, а также их длина могут варьироваться в зависимости от применения робота в учебном процессе. Модульная конструкция звеньев позволяет собирать различные конфигурации манипулятора и использовать разнообразные концевые инструменты в зависимости от применения робота в учебном процессе.
Конструкция звеньев может представлять собой параллелограмм с двумя стержнями (рычагами) произвольной длины.
В конструкции звеньев может быть использована по меньшей мере одна балансировочная пружина растяжения на одно звено, которая позволяет сбалансировать механическую цепь каждого звена и всего манипуляционного робота в целом при любом взаимном расположении звеньев.
В качестве электроприводов могут быть использованы сервоприводы малой мощности.
Система управления роботом может представлять собой печатную плату с микроконтроллером, отладочную плату или компьютер.
Модульность предлагаемой конструкции звеньев является ее одной из особенностей. Существующие учебные манипуляционные роботы известные из уровня техники обладают модульностью конструкции в целом, однако отдельные их звенья являются интегрированными системами. Так, например, известные из уровня техники роботы используют планетарные редукторы и электроприводы, интегрированные в корпус звена. При этом требуется использование специально изготовленных компонентов и трудоемкого процесса сборки. Возможности модификации роботов с помощью стандартных компонентов и быстрой перестройки отдельных звеньев в ходе учебного процесса отсутствуют.
В предлагаемой конструкции звенев используется многошарнирное сочленение, позволяющее производить быструю сборку и разборку робота, а также использовать широкий ассортимент различных стандартных компонентов для модификации учебного робота. Это позволяет создавать различные конфигурации манипуляционных роботов для выполнения различных учебных задач.
В основе конструкции сочленения лежат два корпусных элемента, являющиеся несущими элементами звена. Все остальные дополнительные элементы (например, раздельный электропривод, датчик угла поворота и/или какие-либо другие датчики, зависящие от конкретного применения робота в учебном процессе) могут закрепляться на несущих элементах с внешней стороны с помощью универсального крепления как отдельные модули. При этом их размеры и компоновка могут варьироваться в определённых пределах, что, например позволяет использовать разные электроприводы без необходимости изменения конструкции. Под универсальным креплением подразумевается набор крепежных отверстий на корпусе сочленения. На данные крепёжные отверстия, например, крепится адаптер под конкретный тип привода, а на адаптер уже сам привод. В случае использования стандартного сервопривода адаптер будет иметь прямоугольную форму, подходящую под сервопривод. При этом если мы захотим использовать, например шаговый двигатель, нам просто нужен будет подходящий под него адаптер, который закрепит двигатель на универсальном креплении. При этом универсальное крепление остается тем же и не требует замены корпусных деталей под различные элементы.
Для пояснения сущности предлагаемого решения, в следующем ниже описании показаны примеры осуществления устройства. При этом приведенные примеры выполнения устройства не ограничивают область правовой охраны или объем предлагаемого решения.
На фиг. 1 показан один из примеров осуществления устройства в конфигурации с двумя звеньями. Устройство содержит, в частности, поворотное основание 1, соединённое с первым звеном 2 с помощью многошарнирного сочленения 3 (с двумя шарнирами), являющегося составной частью основания 1. Аналогично первое звено 2 соединяется с последующим вторым по счету (в данном случае с последним) звеном 4 с помощью среднего многошарнирного сочленения 5 (с четырьмя шарнирами), являющегося составной частью первого звена 2. На конце второго звена 4 установлено последнее многошарнирное соединение 6 (с тремя шарнирами), соединяющееся с креплением 7 для концевого инструмента.
Поворотное основание 1 представляет собой узел для изменения ориентации звена механической цепи, соединенного с ним, по двум вращательным степеням свободы. В частности, поворотное основание 1 содержит в себе электропривод 9 и многошарнирное сочленение 3, предназначенное для соединения с последующим звеном 2 механической цепи. Компоненты многошарнирного сочленения образуют два гнезда, обеспечивающих подвижное соединение поворотного основания 1 и рычагов первого звена 2, при этом электроприводы основания могут передавать вращательное движение ограниченной амплитуды на рычаги первого звена 2, обеспечивая возможность изменять ориентацию первого звена 2 в пространстве. Также поворотное основание 1 включает в себя фланец 8 для жесткого закрепления на поверхности опорной платформы и крепления 10 для балансировочных пружин 11 первого звена 2. Подробнее конструкция звена пояснена на фиг. 2.
Опорная платформа к которой может крепиться поворотное основание 1 представляет собой произвольную поверхность, оборудованную отверстиями для крепления фланца 8 поворотного основания 1. При этом опорная платформа может быть как неподвижной, так и подвижной, например являясь частью конструкции мобильного робота или системы линейного перемещения и т.д.
Каждое многошарнирное сочленение представляет из себя конструкцию (корпус) из двух половинок, соединяемых между собой быстросъемными крепежными элементами, например, винтами или др. Соединенные половины сочленения образуют некоторое количество гнезд для шарниров: два гнезда для соединения основания и первого звена, четыре гнезда для соединения первого и второго звена (по два на каждое), и три гнезда для соединения последнего звена (второго в данном случае) и крепления концевого инструмента (два из которых для стержней последнего звена и одно для крепления концевого инструмента). Некоторые из гнезд могут быть приводными, то есть содержать в себе электропривод ось которого совпадает с осью гнезда. В общем случае для подсоединения звена (состоящего из двух трубок) необходима пара гнезд. Такие пары стандартны для любого сочленения, то есть можно без проблем соединить второе звено с основанием или поставить два основания с обоих сторон звена или создавать другие комбинации по типу конструктора.
Конструкция первого звена 2 содержит многошарнирное сочленение 5 с одной вращательной степенью свободы с четырьмя шарнирами, позволяющее, с помощью одного электропривода 19, передавать вращательное движение на последующее звено механической цепи для изменения его ориентации в пространстве. В свою очередь конструкция второго звена 4 содержит многошарнирное сочленение 6 с тремя шарнирами. При этом многошарнирное сочленение 6 дает последующему звену две вращательных степени свободы, которые позволяют, с помощью электропривода 9, передавать вращательное движение на последующее звено механической цепи для изменения его ориентации в пространстве. В остальном звенья имеют идентичную конструкцию, позволяющую, в частности, быстро, надежно и легко соединять их с поворотным основанием, а также с предыдущим звеном механической цепи вне зависимости от его типа. Данное свойство связано с универсальной конструкцией сопрягаемых друг с другом частей многошарнирного сочленения всех типов. Таким образом, использование упомянутых компонентов позволяет создавать различные конфигурации манипуляционных роботов для выполнения различных учебных задач.
Особенности конструкции звена и принципы действия предлагаемого решения детально проиллюстрированы на фиг. 2
Каждое звено выполнено в виде параллелограмма, длинные стороны которого образованы двумя стержнями 12 и 13 произвольной одинаковой длины, на концах которых выполнены шарнирные опоры, а короткие - корпусом многошарнирных сочленений, а именно одна из коротких сторон образована корпусными деталями 14 и 15 многошарнирного сочленения 5, принадлежащего данному звену, а другая короткая сторона образована многошарнирным сочленением предыдущего звена либо многошарнирным сочленением 3 поворотного основания 1. Корпусные детали 14 и 15 многошарнирного сочленения соединяются при помощи стягивающих винтов 16, образуя при этом два гнезда 17 для крепления стержней 12 и 13, а также два гнезда 18 для крепления стержней следующего звена. В одном из данных гнезд расположен привод следующего звена 19, закрепленный на корпусной детали 14, так, что ось электропривода совпадает с осью внутреннего стержня 12. На концах стержней 12 и 13 установлены опоры-шарниры, представляющие собой подшипники качения 20, прикрепленные к стержням 12 и 13 с помощью втулок 21 и 22 соответственно. Данные опоры устанавливаются в гнезда 17, образованные корпусными деталями 12 и 13. При этом внешние кольца 23 подшипников 20 закрепляются в гнездах 17 с помощью использования уступов 24 и 25 в корпусных деталях 14 и 15 соответственно. Внешние кольца 23 подшипников 20 зажимаются в гнездах 17 при помощи стягивающих винтов 16, что обеспечивает жесткое и надежное соединение, но в то же время позволяет быстро собирать и разбирать многошарнирное сочленение в процессе изменения конфигурации манипуляционного робота.
На противоположной стороне внешнего стержня 13 также установлена опора идентичной конструкции, состоящая из втулки 26 и подшипников 27. При этом конструкция данных опор позволяет использовать внутреннее пространство полого стержня 13 для размещения проводов питания и управления приводами устройства. В свою очередь на противоположной стороне стержня 12 установлена опора другой конструкции, включающая в себя втулку 28, подшипник качения 29 с внешним кольцом, и фланец 30, предназначенный для крепления на валу привода предыдущего звена. Крепление происходит с помощью втулки 30, которая притягивается к валу привода предыдущего звена с помощью винта 31.
Таким образом каждое звено предлагаемого решения приводиться в движение приводом предыдущего звена, и в свою очередь приводит в движение последующее звено механической цепи. В приведённой конфигурации устройства в качестве предыдущего звена для звена 2 выступает поворотное основание 1, обладающее аналогичной конструкцией многошарнирного сочленения.
Другим отличием стержня 12 от стержня 13 является наличие крепления 32 для балансировочных пружин 11, принцип действия которых поясняется на принципиальной кинематической схеме данной конфигурации устройства (см. Фиг. 3). Балансировочные пружины 11 могут быть использованы в конструкции любого звена. На каждое звено может устанавливаться по меньшей мере одна такая пружина. Пружина с обоих своих концов имеет зацепы, закрепляемые на втулках, выполненных на элементах звена. Один конец пружины может быть закреплен на втулке, выполненной в корпусе многошарнирного сочленения, например, на корпусе сочленения основания, либо на оси шарнира (например, который без привода), а второй конец пружины может быть закреплен на втулке 32, выполненной в корпусе одного из стержней (на фиг.2, для примера, втулка 32 для крепления пружины выполнена поперек в корпусе внутреннего стержня 12). Для примера, на фиг.1 и фиг.4 каждое звено содержит по две пружины. В процессе изменения геометрии механической цепи звена балансировочные пружины 11 растягиваются, создавая силу, противодействующую силе тяжести. Данное техническое решение позволяет сбалансировать механическую цепь каждого звена и всего манипуляционного робота в целом при любом взаимном расположении звеньев. Таким образом, манипуляционный робот обладает возможностью сохранять заданное положение без усилий со стороны приводов сочленений. Благодаря этому, требуемая мощность приводов существенно снижается по сравнению с конструкциями манипуляционных роботов, не использующих балансировочные пружины. Балансировочные пружины могут быть использованы в любой конфигурации манипуляционного робота, причем количество используемых пружин может варьироваться в зависимости от собственного веса рассматриваемой конфигурации и требуемых технических характеристик.
На фиг. 4 показан другой пример осуществления устройства в конфигурации с тремя звеньями и концевым инструментом. В показанном примере осуществления, устройство повторяет предыдущий пример осуществления с двумя звеньями, однако на конце звена 4 установлено многошарнирное сочленение 33 (с четырьмя шарнирами). Данное многошарнирное сочленение соединят звено 4 со звеном 34. На конце звена 34 установлено многошарнирное сочленение 35 (с тремя шарнирами), которое соединяет звено 34 с концевым инструментом 36.
Следует отметить, что количество и конфигурация звеньев, а также длина каждого отдельно взятого звена может варьироваться в широком диапазоне и ограниченна лишь конструкционной прочностью используемых материалов и мощностью приводов. При этом конструкция позволяет осуществлять быструю перестройку конфигурации устройства, а также осуществлять изменение длины звеньев путем замены стержней. Основная часть конструктивных элементов может быть изготовлена из пластика с помощью использования аддитивных производственных технологии, в частности с помощью широкодоступных бюджетных 3D-принтеров. В качестве стержней могут быть использованы трубки, изготовленные из металла, например из алюминия, или из композитных материалов. В качестве приводов могут быть использованы различные типы электроприводов, как серийного, так и единичного производства, в том числе фабричные сервоприводы стандартного размера и электроприводы экспериментальных конструкций.
В ходе учебного процесса учащиеся используют робота для проведения лабораторных и исследовательских работ, а также практической отработки и демонстрации навыков, приобретенных в процессе обучения. В число возможных сценариев применения в учебном процессе входит сборка учебного манипуляционного робота из предоставленных деталей, использование компьютерного интерфейса для программирования робота на выполнение различных команд, перестройка конфигурации робота в зависимости от характера поставленных задач, проектирование и изготовление дополнительных модулей и сменных концевых инструментов в целях расширения функционала учебного робота и т.д. Благодаря широкому спектру функциональных возможностей и различных конфигураций устройство позволяет выполнять учебные задачи по программированию, конструированию, сборке и эксплуатации робототехнических устройств, средств автоматизации, а также систем бытового и промышленного интернета вещей.
Конечно, без ущерба для принципа данного изобретения и, не выходя за рамки объема правовой охраны, определенного в прилагаемой формуле изобретения, могут быть применены детали конструкции и примеры осуществления изобретения, отличающиеся, в том числе значительно, от того, что было описано и проиллюстрировано здесь исключительно в качестве примера.
Заявленное техническое решение может быть направлено на расширение арсенала технических средств, пригодных для массового использования в образовательных учреждениях для обучения робототехнике, а также на расширение спектра возможных применений робототехники в учебном процессе и повышение доступности образования в сфере информационных технологий и робототехники, а точнее на:
• Расширение спектра возможных применений робототехники в учебном процессе за счет возможности собирать различные конфигурации манипулятора и использовать разнообразные концевые инструменты, а также изготавливать конструктивные элементы в ходе учебного процесса путем использования аддитивных производственных технологии, в частности с помощью широкодоступных бюджетных 3D-принтеров.
• Снижение трудоемкости, возможность модернизации и проведения ремонтных работ за счет использования широкодоступных конструктивных элементов и предоставления пользователем возможности самостоятельно изготовлять конструктивные элементы, путем использования широкодоступных производственных технологий, не требующих высокой квалификации оператора.
• Повышение доступности обучения программированию, конструированию и эксплуатации манипуляционных роботов, за счет возможности снизить себестоимость учебного робота путем использования маломощных электроприводов.
• Повышение качества получаемого образования в сфере информационных технологий и робототехники, за счет предоставления простого, надежного, эргономичного и функционального средства обучения.
Изобретение относится к области робототехники, в частности к роботам-манипуляторам, предназначенным для использования в учебном процессе для обучения робототехнике. Модульный манипуляционный робот содержит поворотное основание, закрепляемое на опорной поверхности, и модульную механическую цепь с изменяемой геометрией, состоящую из по меньшей мере двух звеньев, соединенных при помощи многошарнирных сочленений, которая одним концом подвижно соединена с поворотным основанием, а другой ее конец свободен и выполнен с возможностью присоединения сменного концевого инструмента. Первое многошарнирное сочленение соединено с поворотным основанием и первым звеном, последнее многошарнирное сочленение соединено с креплением концевого инструмента и последним звеном, а звенья соединены между собой по меньшей мере одним средним многошарнирным сочленением. Каждое звено выполнено в виде параллелограмма, длинные стороны которого образованы двумя стержнями произвольной одинаковой длины, на концах которых выполнены шарниры-опоры, а короткие - корпусом многошарнирных сочленений. Каждое многошарнирное сочленение представляет собой корпус, состоящий из двух половин, соединенных крепежными элементами, в котором выполнены гнезда для шарниров стержней звена. Каждое звено содержит по меньшей мере одну балансировочную пружину и электропривод, закрепленный на корпусе многошарнирного сочленения. Техническим результатом изобретения является обеспечение быстрой сборки и разборки робота, универсальность, возможность создания различных конфигураций манипуляционных роботов в ходе выполнения различных учебных задач, обеспечение надежности его работы и снижение трудоемкости изготовления. 9 з.п. ф-лы, 4 ил.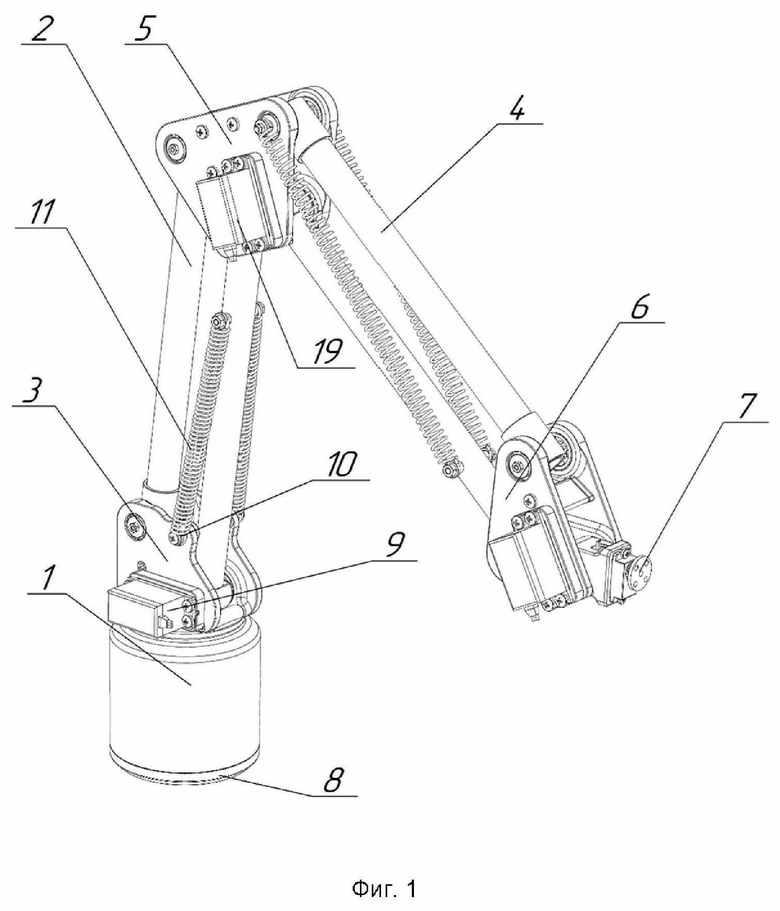
1. Модульный манипуляционный робот, характеризующийся тем, что содержит поворотное основание, закрепляемое на опорной поверхности, и модульную механическую цепь с изменяемой геометрией, состоящую из по меньшей мере двух звеньев, соединенных при помощи многошарнирных сочленений, которая одним концом подвижно соединена с поворотным основанием, а другой ее конец свободен и выполнен с возможностью присоединения сменного концевого инструмента, причем первое многошарнирное сочленение соединено с поворотным основанием и первым звеном, последнее многошарнирное сочленение соединено с креплением концевого инструмента и последним звеном, а звенья соединены между собой по меньшей мере одним средним многошарнирным сочленением, при этом каждое звено выполнено в виде параллелограмма, длинные стороны которого образованы двумя стержнями произвольной одинаковой длины, на концах которых выполнены шарниры-опоры, а короткие - корпусом многошарнирных сочленений, при этом каждое многошарнирное сочленение представляет собой корпус, состоящий из двух половин, соединенных крепежными элементами, в котором выполнены гнезда для шарниров стержней звена, при этом каждое звено содержит по меньшей мере одну балансировочную пружину и электропривод, закрепленный на корпусе многошарнирного сочленения.
2. Модульный манипуляционный робот по п.1, характеризующийся тем, что первое многошарнирное сочленение, соединяющее поворотное основание и первое звено, содержит два гнезда под шарниры стержней.
3. Модульный манипуляционный робот по п.1, характеризующийся тем, что последнее многошарнирное сочленение, соединяющее последнее звено и крепление для концевого инструмента, содержит три гнезда, два из которых под шарниры стержней, а одно под крепление концевого инструмента.
4. Модульный манипуляционный робот по п.1, характеризующийся тем, что среднее многошарнирное сочленение, соединяющее звенья между собой, содержит четыре гнезда, два из которых под шарниры стержней одного звена, а два других под шарниры стержней другого звена.
5. Модульный манипуляционный робот по п.1, характеризующийся тем, что один из стержней звена на обоих своих концах содержит шарниры-опоры, включающие подшипники качения с внешними кольцами, прикрепленные к стержням с помощью втулок, и устанавливаемые в гнезда, образованные корпусными деталями.
6. Модульный манипуляционный робот по п.1, характеризующийся тем, что на одном из концов стержня установлена опора, включающая в себя втулку, подшипник качения с внешним кольцом и фланец для крепления на валу привода предыдущего звена.
7. Модульный манипуляционный робот по п.6, характеризующийся тем, что внешние кольца подшипников качения закреплены в гнездах с помощью уступов в корпусных деталях и зажаты в гнездах при помощи стягивающих элементов крепления.
8. Модульный манипуляционный робот по п.1, характеризующийся тем, что электропривод закреплен на корпусе многошарнирного сочленения таким образом, что ось электропривода совпадает с осью гнезда и осью шарнира-опоры стержня.
9. Модульный манипуляционный робот по п.1, характеризующийся тем, что пружина с обоих своих концов имеет зацепы, закрепляемые на втулках, выполненных на элементах звена.
10. Модульный манипуляционный робот по п.9, характеризующийся тем, что один конец пружины закреплен на втулке, выполненной в корпусе многошарнирного сочленения, или на оси шарнира стержня, а второй конец пружины закреплен на втулке, выполненной в корпусе одного из стержней.
| US 5293107 A1, 08.03.1994 | |||
| Функциональное устройство, такое как робот, с соединяемыми друг с другом модулями для применения в сфере образования | 2017 |
|
RU2745228C2 |
| US 6084373 A1, 04.07.2000 | |||
| Образовательно-исследовательский комплекс робот малый антропоморфный | 2019 |
|
RU2718513C1 |
| УНИВЕРСАЛЬНЫЙ ТРАНСФОРМИРУЮЩИЙСЯ МОДУЛЬНЫЙ РОБОТ | 1998 |
|
RU2166427C2 |
| Устройство для контроля расхода жидкого горючего двигателями внутреннего сгорания | 1940 |
|
SU75086A1 |

