Изобретение относится к сельскому хозяйству и может быть использовано при планировке орошаемых земель.
Известен способ планировки орошаемых земель и устройство для планировки орошаемых земель [1]. Известный способ включает предварительную вертикальную съемку относительно лазерной опорной плоскости, создаваемой лазерным передатчиком, путем перемещения по участку планирующего устройства с поднятым рабочим органом на высоту Н от поверхности земли и измерения микропроцессорным устройством текущих высотных отметок фотоприемника hi относительно режущей кромки рабочего органа, обработку информации о рельефе с определением среднеарифметического значения hcp измеренных высотных отметок hi, установку фотоприемника на высоту Нр=hcp+Н и проведение планировки участка планирующим устройством без перестановки лазерного передатчика.
Известно устройство для планировки орошаемых земель, включающее планирующее устройство, содержащее базовую раму, опорные колеса с датчиком пути, исполнительные гидроцилиндры, рабочий орган, электрогидравлическое устройство и механизм перемещения с фотоприемником лазерного излучения и датчиком измерения высоты его перемещения, микропроцессорное устройство, входы которого подключены к датчикам высоты и пути, и лазерный передатчик.
Недостатком такого способа и устройства является низкая производительность планирующего устройства при проведении предварительной съемки за счет перемещения планирующего устройства по участку параллельными проходами с шагом съемки 20 м.
Целью заявляемого изобретения является повышение производительности планирующего устройства при проведении предварительной съемки за счет перекрестного маршрута движения планирующего устройства и сокращения количества его проходов по участку.
Указанная цель достигается тем, что способ, включающий предварительную вертикальную съемку относительно лазерной опорной плоскости, создаваемой лазерным передатчиком, путем перемещения по участку планирующего устройства с поднятым рабочим органом на высоту Н от поверхности земли и измерения микропроцессорным устройством текущих отметок фотоприемника hi относительно режущей кромки рабочего органа, обработку информации о рельефе с определением среднеарифметического значения hсp измеренных высотных отметок hi, установку фотоприемника на высоту Нр=hсp+H и проведение планировки участка планирующим устройством без перестановки лазерного передатчика, отличается тем, что съемку производят путем перекрестных прямолинейных перемещений планирующего устройства сначала из одного угла на первой стороне участка к средней точке его второй параллельной стороны и от этой точки ко второму углу на первой стороне участка и затем из одного угла на второй стороне участка к средней точке его первой стороны и от этой точки ко второму углу на второй стороне участка, далее вычисляют среднеарифметические значения Hcpj измеренных высотных отметок hi на каждой половине сделанных перекрестных прямолинейных проходов и отметки срезок и насыпей Δj=Hcpj-hcp, а затем проводят планировку участка планирующим устройством путем его перемещения из зон вычисленных срезок в зоны вычисленных насыпей.
Планирующее устройство для осуществления этого способа, включающее планирующее устройство, содержащее базовую раму, опорные колеса с датчиком пути, исполнительные гидроцилиндры, рабочий орган, электрогидравлическое устройство и механизм перемещения с фотоприемником лазерного излучения и датчиком измерения высоты его перемещения, микропроцессорное устройство, входы которого подключены к датчикам высоты и пути, и лазерный передатчик, отличается тем, что оно снабжено вычислительным устройством, входы которого подключены к микропроцессорному устройству и датчикам высоты и пути.
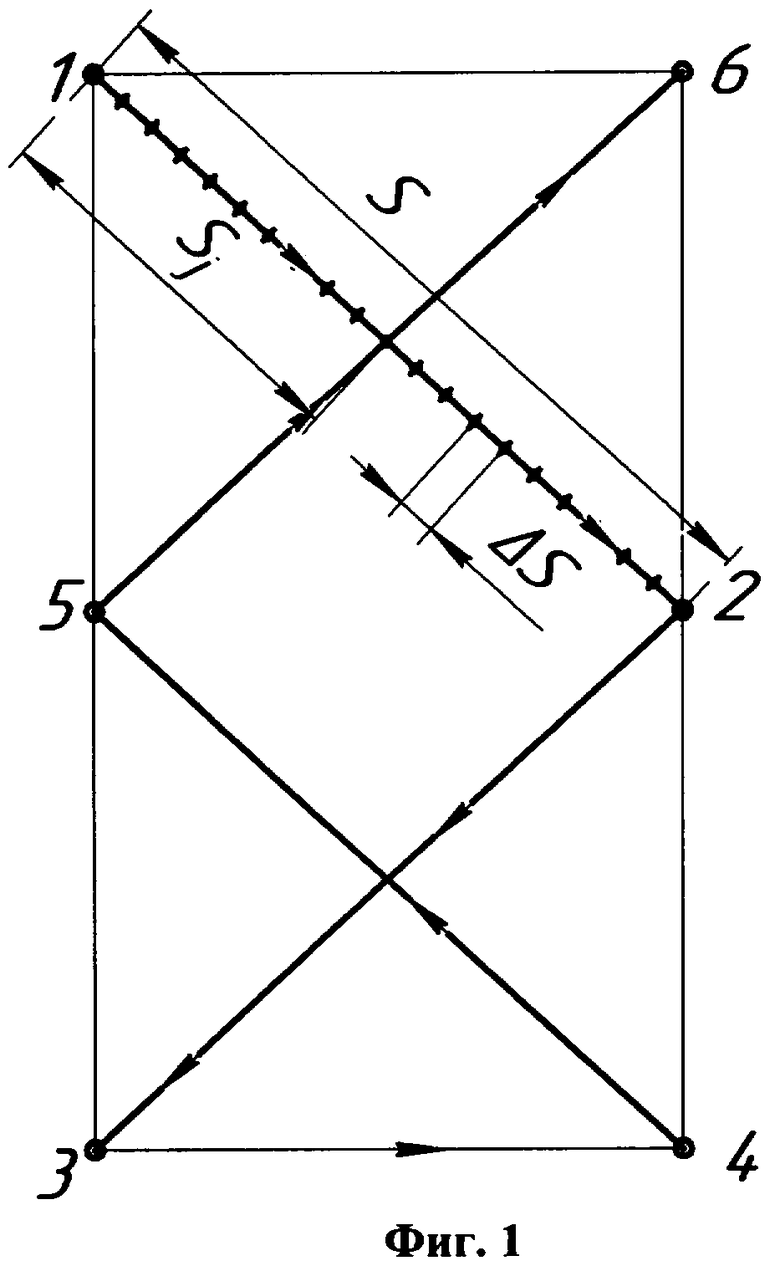
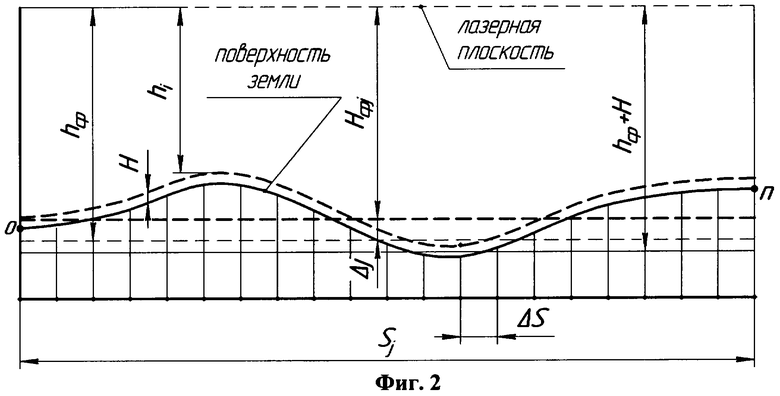
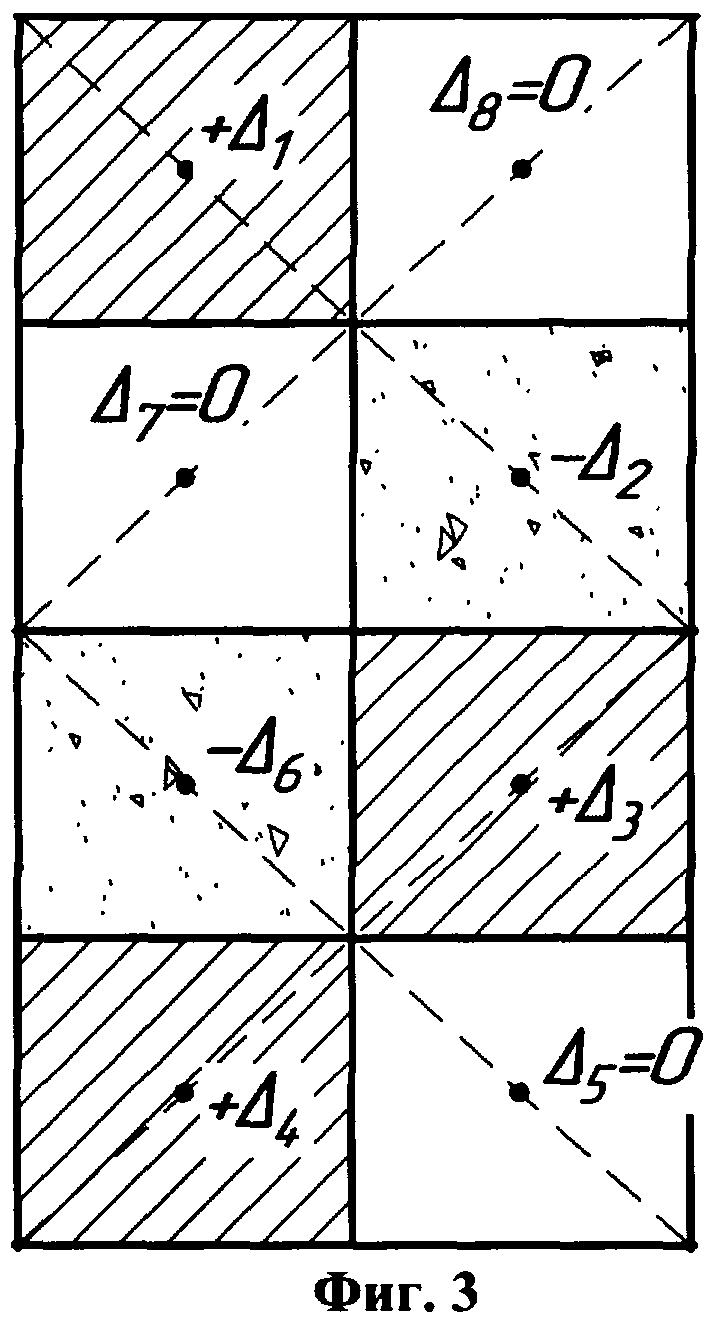
Изобретение иллюстрируется чертежами. На фиг.1 изображен продольный профиль отрезка пути Sj, пройденного планирующим устройством, для определения высотных отметок срезок и насыпей, на фиг.2 - схема съемки, на фиг.3 - схема месторасположений зон срезок I, насыпей II и зон нулевых работ III.
Предлагаемый способ состоит из следующих операций. Лазерный передатчик устанавливается на участке и формирует лазерную опорную плоскость (фиг.1). Затем производится предварительная вертикальная съемка микрорельефа относительно лазерной плоскости при помощи планирующего устройства с поднятым рабочим органом на высоту Н. При движении планирующего устройства по неровностям участка все перемещения фотоприемника, равные текущим высотным отметкам hi, автоматически записываются и хранятся в памяти микропроцессорного устройства, куда одновременно передаются и записываются сигналы от датчиков высоты и пути.
Съемка начинается первым прямолинейным проходом планирующего устройства на расстояние S из угла 1 на первой (левой) стороне участка к средней точке 2 его второй (правой) параллельной стороны (фиг.2). Далее планирующее устройство совершает от этой точки 2 второй прямолинейный проход длиной S ко второму углу 3 на первой стороне участка. Затем после холостого прохода из угла 3 в угол 4 планирующее устройство делает перекрестный третий прямолинейный проход из угла 4 к средней точке 5 и от нее четвертый перекрестный проход к углу 6. Шаг измерений высотных отметок - ΔS.
В процессе движения планирующего устройства осуществляется обработка информации о рельефе. После прохождения каждого прямолинейного расстояния S с помощью вычислительного устройства определяются среднеарифметические значения Hcpj измеренных высотных отметок hi на отрезке Sj=1/2S. Такие вычисления производятся на всех четырех сделанных перекрестных прямолинейных проходах съемки 1-2, 2-3, 4-5, 5-6 по формуле (фиг.1 и 2):
 ,
,
где hi - высотные отметки на отрезке Sj,
n - количество высотных отметок на отрезке Sj.
После завершения съемки вычислительное устройство определяет среднеарифметическую отметку hcp по всем 4 проходам по выражению:
 ,
,
где m - общее число высотных отметок по 4 проходам.
Вычисленная среднеарифметическая отметка является проектной отметкой при проведении последующей планировки. Далее вычислительное устройство определяет высотные отметки срезок и насыпей в центрах условных прямоугольных зон Δj, на которые разбивается весь участок (фиг.1 и 3), по формуле:
Δj=Hcpj-hcp.
Вычисленная величина Δj со знаком + (плюс) является местом срезки, а со
знаком - (минус) - местом насыпи, а нулевое значение - местом нулевых работ, где планировка не проводится. Вычисленные высотные отметки и месторасположения зон срезок, насыпей и зон нулевых работ отображаются на экране дисплея микропроцессорного устройства. Это позволяет наметить маршрут передвижения машины при планировке.
После установки фотоприемника на высоте Нр=hcp+Н проводят планировку участка планирующим устройством в режиме автоматического поддержания фотоприемника на лазерной плоскости при помощи электрогидравлического устройства по командам микропроцессорного устройства. Планирующее устройство при движении срезает грунт в зонах срезок, транспортирует его в зоны насыпей и там грунт отсыпает. Срезка и отсыпка грунта под проектные отметки осуществляются в автоматическом режиме управления. В начале работ грунт из зоны срезки с наибольшим значением Δj вывозится в ближайшую зону насыпи. Если объем грунта в зоне срезки превышает объем грунта в зоне ближайшей отсыпки, то избыточный грунт вывозится в другую зону отсыпки. При недостатке объема грунта в зоне насыпи производится вывоз грунта из другой зоны срезки. После каждого сделанного прохода планирующего устройства на участке остаются маячные полосы, которые являются ориентиром для последующих проходов. При этом отдельные неровности с понижениями в зонах срезки и неровности с повышениями в зонах насыпи устраняются в процессе планировки по маячным полосам.
Предлагаемый способ и устройство орошаемых земель позволяют повысить производительность планирующего устройства при проведении предварительной съемки за счет перекрестного маршрута движения планирующего устройства и сокращения количества его проходов по участку.
Источники информации
1. Патент на изобретение №2240681 «Способ планировки орошаемых земель и устройство для планировки орошаемых земель», Бюл. №33, 2004.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЛАНИРОВКИ ОРАШАЕМЫХ ЗЕМЕЛЬ И УСТРОЙСТВО ДЛЯ ПЛАНИРОВКИ ОРОШАЕМЫХ ЗЕМЕЛЬ | 2001 |
|
RU2240681C2 |
| СПОСОБ ПЛАНИРОВКИ ЗЕМЕЛЬ | 2017 |
|
RU2689467C1 |
| СПОСОБ ПЛАНИРОВКИ ОРОШАЕМЫХ ЗЕМЕЛЬ И УСТРОЙСТВО ДЛЯ ПЛАНИРОВКИ ОРОШАЕМЫХ ЗЕМЕЛЬ | 1997 |
|
RU2131664C1 |
| Планировщик | 1990 |
|
SU1768718A1 |
| СПОСОБ ПЛАНИРОВКИ ОРОШАЕМЫХ ЗЕМЕЛЬ | 2001 |
|
RU2229216C2 |
| СПОСОБ РЕМОНТНОЙ ПЛАНИРОВКИ ПОВЕРХНОСТИ ПОЛЯ МЕЛИОРАТИВНОЙ СИСТЕМЫ | 2006 |
|
RU2329632C2 |
| Способ повышения продуктивности лиманных сенокосов | 2018 |
|
RU2714226C1 |
| ЛАЗЕРНЫЙ ПРОФИЛОГРАФ | 2001 |
|
RU2227898C2 |
| Способ планировки рисовых чеков | 1987 |
|
SU1447302A1 |
| Система управления курсом движения землеройных машин | 1989 |
|
SU1647092A1 |
Способ планировки орошаемых земель включает предварительную вертикальную съемку относительно лазерной опорной плоскости, создаваемой лазерным передатчиком, путем перемещения по участку планирующего устройства с поднятым рабочим органом и измерения текущих отметок фотоприемника относительно режущей кромки рабочего органа, обработку информации о рельефе с определением среднеарифметического значения измеренных высотных отметок и проведение планировки участка планирующим устройством без перестановки лазерного передатчика. Съемку производят путем перекрестных прямолинейных перемещений планирующего устройства, далее вычисляют среднеарифметические значения измеренных высотных отметок на каждой половине сделанных перекрестных прямолинейных проходов и отметок краев участка, а затем проводят планировку участка по вычисленным значениям. Устройство для планировки орошаемых земель включает планирующее устройство, содержащее базовую раму, опорные колеса с датчиком пути, рабочий орган и устройство с фотоприемником лазерного излучения и датчиком измерения высоты. Кроме того, оно содержит вычислительное устройство, при помощи которого вычисляют среднеарифметические значения измеренных высотных отметок, подключенное к датчикам высоты и пути. Способ и устройство позволяют повысить производительность при проведении предварительной съемки за счет перекрестного маршрута движения планирующего устройства и сокращения количества его проходов по участку. 2 н.п. ф-лы, 3 ил.
1. Способ планировки орошаемых земель, включающий предварительную вертикальную лазерную съемку поверхности земли путем перемещения по участку планирующего устройства с поднятым рабочим органом от поверхности земли и измерения текущих отметок фотоприемника, обработку информации о рельефе с определением среднеарифметического значения измеренных высотных отметок и проведение планировки участка планирующим устройством, в котором съемку производят путем перекрестных прямолинейных перемещений планирующего устройства, при этом съемка начинается первым прямолинейным проходом планирующего устройства из угла на левой стороне участка к средней точке его правой параллельной стороне, далее от этой точки планирующее устройство совершает второй прямолинейный проход ко второму углу на левой стороне участка, затем после холостого прохода из этой точки в угол на правой стороне участка планирующее устройство делает перекрестный третий прямолинейный проход из угла на правой стороне к средней точке на левой стороне и от нее четвертый перекрестный проход к другому углу на правой стороне участка, далее вычисляют среднеарифметические значения измеренных высотных отметок на каждой половине сделанных перекрестных прямолинейных проходов и отметок краев участка, а затем проводят планировку участка по вычисленным значениям.
2. Устройство для планировки орошаемых земель для осуществления способа по п.1, которое включает планирующее устройство, содержащее базовую раму, опорные колеса с датчиком пути, рабочий орган и устройство с фотоприемником лазерного излучения и датчиком измерения высоты, при этом оно содержит вычислительное устройство, при помощи которого вычисляют среднеарифметические значения измеренных высотных отметок, подключенное к датчикам высоты и пути.
| СПОСОБ ПЛАНИРОВКИ ОРАШАЕМЫХ ЗЕМЕЛЬ И УСТРОЙСТВО ДЛЯ ПЛАНИРОВКИ ОРОШАЕМЫХ ЗЕМЕЛЬ | 2001 |
|
RU2240681C2 |
| СПОСОБ ПЛАНИРОВКИ ОРОШАЕМЫХ ЗЕМЕЛЬ И УСТРОЙСТВО ДЛЯ ПЛАНИРОВКИ ОРОШАЕМЫХ ЗЕМЕЛЬ | 1997 |
|
RU2131664C1 |
| Способ планирования рисовых чеков | 1987 |
|
SU1449059A1 |
| ВЕЛИЧКО Е.Б | |||
| и др | |||
| Технология получения высоких урожаев риса | |||
| - М.: Колос, 1984, с.57-83 | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Технические условия | |||
| - Ташкент, 1984. | |||

