Изобретение относится к строительной технике, в частности, к устройствам для измерения макро- и микропрофилей мелиоративных, дорожных и других строительных объектов.
Важной задачей при проведении земляных работ на объектах дорожного, сельско- и водохозяйственного, аэродромного строительства во многих случаях является создание плоской поверхности с заданной степенью точности. Особенно большое значение имеет планировка поливных участков для повышения урожайности многих культур, таких как, например, рис (планировка под горизонтальную плоскость). Первостепенное значение в мелиоративном строительстве имеет определение высотных отметок местности.
Для указанных целей широко используются лазерные приборы и системы. Известен, например, лазерный автонивелир, включающий две основные подсистемы: лазерный излучатель, который формирует в пространстве равносигнальную зону, и приемное устройство, размещенное на транспортном средстве и позволяющее осуществлять автоматическое измерение и регистрацию текущих высотных координат (превышений) (1). Приемная аппаратура автонивелира включает фотоприемник, закрепленный на базовой рейке, датчик положения, измеряющий положение фотоприемника относительно транспортного средства, и систему обработки информации о положении фотоприемника. Перемещение фотоприемника и базовой рейки осуществляется посредством трособлочной системы.
Известна также система для топографической съемки, содержащая стационарный передатчик для генерирования и вращения лазерного луча в плоскости над поверхностью земли и приемник, установленный на транспортном средстве и связанный с системой обработки информации, выполненной на базе микроЭВМ (2).
В качестве прототипа заявляемого технического решения выбран лазерный профилограф, включающий излучатель, установленный на измеряемой местности, фотоприемник с индикатором, установленный на транспортном средстве и выполненный с возможностью вертикального перемещения, измеритель перемещения фотоприемника, связанный с валом электродвигателя, датчик пути и блок обработки информации. Измеритель перемещения фотоприемника выполнен в виде полудиска, закрепленного на валу электродвигателя, и двух индукционных датчиков положения полудиска (3).
Известный профилограф работает следующим образом. Лазерный излучатель устанавливается на местности и путем круговой развертки луча лазера создается опорная плоскость, занимающая строго горизонтальное положение, которое берется за нулевую высоту поверхности, профиль которой измеряется. Фотоприемник улавливает сигналы излучателя и вырабатывает электрический сигнал, поступающий на индикатор. Электродвигатель поднимает или опускает фотоприемник посредством механизма вертикального перемещения. Величина подъема - спуска фотоприемника соответствует высотам измеряемого профиля поверхности, которые получают на датчике высоты поверхности через определенные интервалы пути, измеряемые датчиком пути. Измерение перемещения фотоприемника определяется по сочетанию сигналов с индукционных датчиков. Недостатком известного профилографа является сложность конструктивного решения измерителя перемещения фотоприемника и связанной с ним системы обработки информации, что, в свою очередь, снижает надежность работы профилографа.
Задача, решаемая изобретением, - повышение надежности работы лазерного профилографа.
Указанная задача решается тем, что лазерный профилограф, содержащий излучатель, фотоприемник, размещенный на механизме вертикального перемещения, установленном на транспортном средстве и снабженном приводом, измеритель перемещения фотоприемника и датчик пути, подсоединенные к средствам обработки информации, отличается тем, что механизм вертикального перемещения фотоприемника состоит из корпуса, внутри которого размещен шток, установленный при помощи направляющих в корпусе, а измеритель перемещения фотоприемника выполнен в виде потенциометра реостатного типа, содержащего систему нитей из высокоомного материала, закрепленную посредством изоляторов параллельно штоку на корпусе, и движок щеточного типа, размещенный на нижнем торце штока, при этом средства обработки информации выполнены в виде аналого-цифрового преобразователя и контроллера, связанного своими входами с выходами аналого-цифрового преобразователя и датчиком пути, при этом одна нить соединена своими концами с источником питания и общей шиной, а другая нить одним из своих концов соединена с входом аналого-цифрового преобразователя.
В качестве материала нити потенциометра может быть использован, например, нихром.
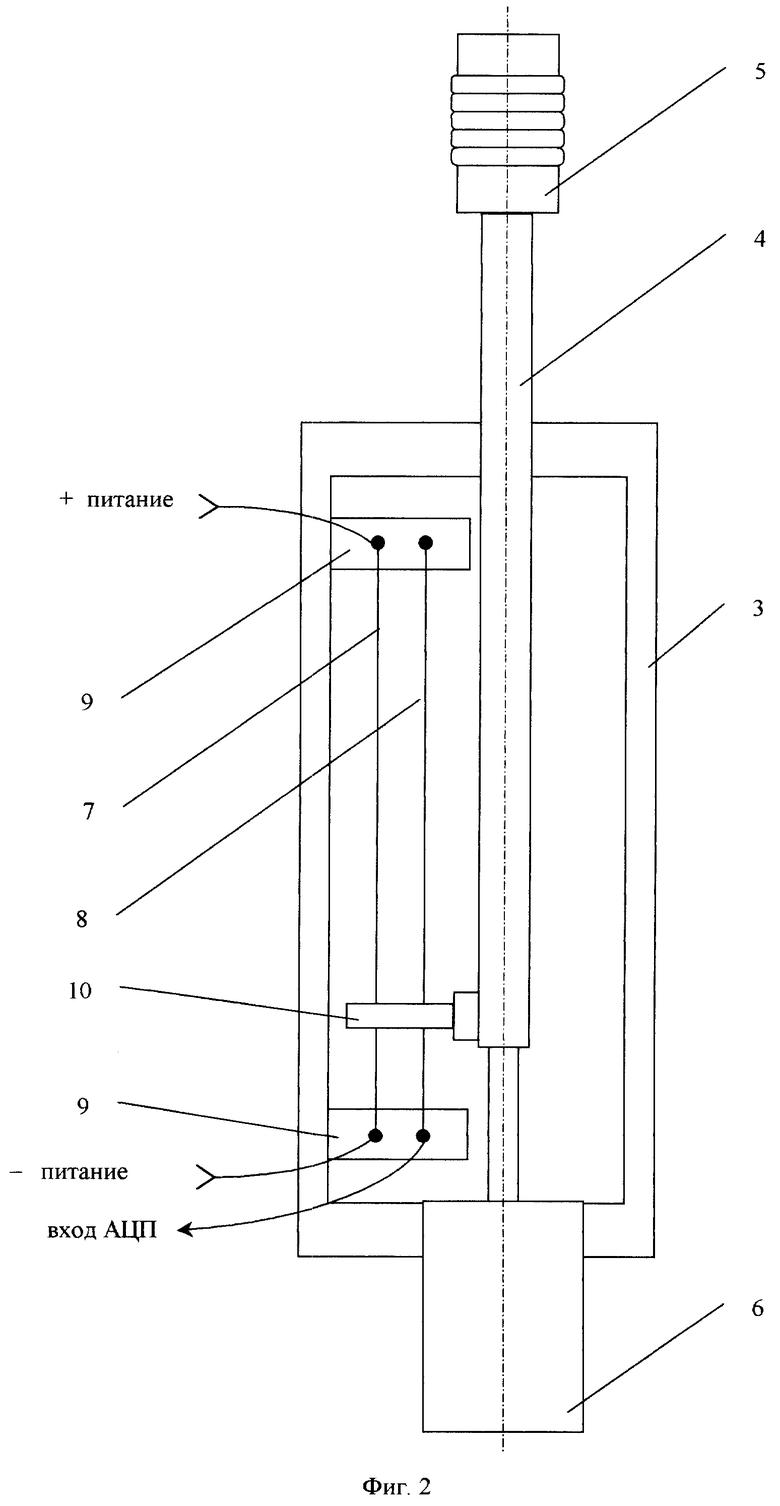
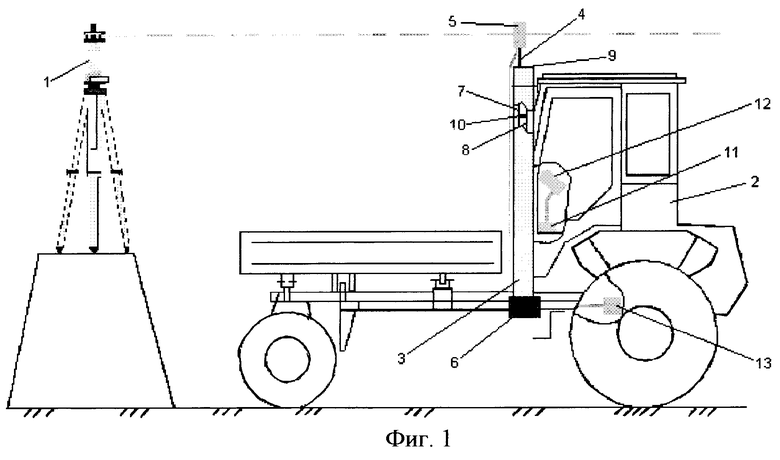
Изобретение иллюстрируется чертежами. На фиг.1 схематически изображен лазерный профилограф, на фиг.2 - механизм вертикального перемещения фотоприемника.
Лазерный профилограф содержит излучатель 1 (в качестве которого может использоваться лазерный передатчик типа МАЯК-1, L-600, LP-30S и др.), устанавливаемый на измеряемой местности, транспортное средство 2 (например, самоходное шасси Т-16М), на котором установлен механизм вертикального перемещения фотоприемника, состоящий из корпуса 3, представляющего собой цилиндрическую трубу, внутри которой размещен на направляющих центрально по отношению к трубе шток 4, на верхнем торце которого установлен фотоприемник 5, привод перемещения штока 4, представляющий собой электродвигатель 6 с червячной передачей, измеритель перемещения фотоприемника 5, выполненный в виде потенциометра, включающего первую нить 7 и вторую нить 8 из высокоомного материала, например нихрома, закрепленные посредством изоляторов 9 на боковой поверхности корпуса 3 параллельно штоку 4, и движок щеточного типа 10, установленный на нижнем торце штока 4, средства обработки информации о положении фотоприемника 5, выполненные в виде аналого-цифрового преобразователя (АЦП) 11, контроллера 12, и датчик пути 13.
Верхний конец нити 7 через балластное сопротивление подключен к плюсу источника питания, а другой конец заземлен. Нижний конец нити 8 соединен с входом АЦП 11, выход которого подключен к одному из входов контроллера 12, к другому входу которого подключен выход датчика пути 13. Нити 7 и 8 расположены относительно штока 4 таким образом, что движок 10 может перемещаться по ним как вверх (что соответствует поднятию штока), так и вниз (что соответствует его опусканию).
Устройство работает следующим образом. Лазерный излучатель 1 устанавливается на местности и путем круговой развертки луча создает опорную плоскость. По команде, поступающей с контроллера 12, электродвигатель 6 начинает поднимать шток 4 до тех пор, пока уровень пересечения фотоприемника 5 не совпадет с лазерной плоскостью, после чего подъем штока 4 прекращается. Одновременно с поднятием штока 4 жестко связанный с ним движок 10 перемещается по нитям 7 и 8. Величина перемещения фотоприемника 5 определяется значением сигнала, поступающего на вход АЦП 11, который пропорционален величине этого перемещения. При подъеме штока 4 величина сигнала возрастает, при опускании - убывает. С выхода АЦП 11 сигнал поступает на один из входов контроллера 12, в памяти которого записывается измеренное значение высоты в данной точке поверхности. После этого профилограф начинает работать в режиме автоматического слежения механизма перемещения фотоприемника за уровнем лазерной плоскости. При смещении указанного механизма вниз относительно лазерной плоскости контроллер 12 выдает команду на подъем фотоприемника 5 и наоборот. Значение координаты, соответствующей текущему значению высоты, определяется датчиком пути 13.
Реализация потенциометра в виде системы 2-х нитей, по которым перемещается движок, соединяющий обе нити между собой, обеспечивает линейное изменение выходного напряжения от 0 до +Епит во всем высотном диапазоне.
Выполнение измерителя перемещения фотоприемника в виде простой потенциометрической схемы вместе с конструктивным решением механизма перемещения фотоприемника и схемным решением системы обработки информации позволяет упростить профилограф и повысить надежность его работы по сравнению с прототипом при сохранении всех точностных характеристик, и, как следствие, повысить оперативность геодезической съемки, проектировочных и планировочных работ.
ЛИТЕРАТУРА
1. Б.Д.Кононыхин. Лазерные системы управления машинами дорожного строительства. - М.: Машиностроение, 1990 г., с. 292-295.
2. Патент США №4600997, кл. 364-505, 1983 г.
3. Авторское свидетельство СССР №1707473, кл. G 01 C 7/00, 1992 г. (прототип).
Изобретение относится к строительной технике, в частности к устройствам для измерения макро- и микропрофилей мелиоративных, дорожных и других строительных объектов. Лазерный профилограф включает излучатель, фотоприемник, измеритель перемещения фотоприемника и датчик пути, которые подключены к средствам обработки информации. Фотоприемник размещен на механизме вертикального перемещения, снабженном приводом и установленном на транспортном средстве. Механизм вертикального перемещения фотоприемника состоит из корпуса, внутри которого размещен шток, установленный при помощи направляющих в корпусе. Измеритель перемещения фотоприемника выполнен в виде потенциометра реостатного типа, который содержит систему нитей из высокоомного материала и движок щеточного типа. Система нитей закреплена при помощи изоляторов параллельно штоку на корпусе. Движок щеточного типа установлен на нижнем торце штока. Средства обработки информации выполнены в виде аналого-цифрового преобразователя и контроллера. Контроллер связан своими входами с выходами аналого-цифрового преобразователя и датчиком пути. Одна из нитей соединена своими концами с источником питания и общей шиной. Другая нить одним из своих концов соединена с входом аналого-цифрового преобразователя. Технический результат состоит в повышении надежности работы лазерного профилографа. 1 з.п. ф-лы, 2 ил.
| Лазерный профилограф | 1989 |
|
SU1707473A1 |
| Устройство для контроля за положением рабочего органа землеройных машин | 1972 |
|
SU464779A1 |
| Дорожный профилограф | 1959 |
|
SU123721A2 |
| РАКЕТА, ЗАПУСКАЕМАЯ ИЗ ТРУБЧАТОЙ НАПРАВЛЯЮЩЕЙ | 1999 |
|
RU2148778C1 |
| GB 1436740 А, 26.05.1976. | |||

