Предлагаемое изобретение «Способ планировки земель» относится к сельскому хозяйству и предназначено для проведения планировочных работ на землях различного назначения.
Известна землеройно-транспортная машина [4], которая содержит контроллер и соединенные с ним инерциальный измеритель и орган ручного управления рабочим органом ЗТМ. Контроллер формирует сигналы управления регулируемым электрогидравлическим приводом подъема/опускания и/или перекоса рабочего органа из условия стабилизации его углового положения относительно машины или гравитационной вертикали, положения по высоте относительно машины, грунтовой поверхности или предварительно заданной проектной поверхности, скорости перемещения по какой-либо координате или соотношения скоростей горизонтального и вертикального перемещения. Дополнительно реализованы различные альтернативные технические решения, включая комбинированное ручное и автоматизированное управление рабочим органом, определение его положения или параметров движения с помощью инерциальных измерителей, реализованных на основе акселерометров, гироскопов и цифровых методов обработки их сигналов, различные варианты коррекции интеграторов инерциальных измерителей, применение переносного устройства нивелирования и транспондеров или RFID-меток для контроля исходного уровня грунтовой поверхности, различные способы ввода и отображения данных о проектной и реальной грунтовой поверхности и т.д. Изобретение обеспечивает повышение точности работы ЗТМ в режиме планирования грунта и расширение сферы применения системы управления за счет обеспечения возможности ее использования в тех условиях, в которых невозможен прием сигналов спутников глобальной навигационной системы. При работе этой машины сначала вводятся цифровые модели исходной и проектной грунтовой поверхности. Затем по разности отметок исходной и проектной поверхности контроллер вырабатывает сигналы управления приводом машины, по которым формируется проектный профиль земляного полотна. В этом случае решается задача только по планировке одного уровня - проектной поверхности и не программируется вести планировку послойно на разных уровнях. В случаях, когда мощности двигателя недостаточно для срезки грунта до проектной поверхности и машина (бульдозер, скрепер) начинает буксовать, то по сигналам датчика буксования рабочий орган приводом приподнимается на величину, достаточную для устранения буксования, после чего происходит дальнейшая срезка грунта меньшей величины. Оставшаяся толщина неснятого грунта до проектной поверхности устраняется следующим проходом машины в автоматическом режиме с той же цифровой моделью проектной грунтовой поверхности с первоначальным уровнем.
Известны способы планировки земель, включающие срезку грунта в зонах повышений и отсыпку грунта в зонах понижений под проектную отметку рабочим органом землеройно-планировочной машины с лазерной системой автоматического управления (ЛСАУ), состоящей из лазерного передатчика, формирующего лазерную плоскость, телескопической мачты с актуатором, приемника лазерного излучения, пульта управления, электрогидроблока, исполнительного гидроцилиндра, регулирующего при помощи опорных колес машины высотные положения рабочего органа с приемником по командам ЛСАУ [1-3].
В процессе планировки земли планировщиком, оснащенным ЛСАУ, приемник вырабатывает относительно лазерной плоскости сигналы управления «Норма», «Вниз» и «Вверх», которые передаются последовательно в пульт управления, электрогидроблок и далее исполнительному гидроцилиндру, удерживающему центр приемника на лазерной плоскости и рабочий орган на проектной глубине, параллельной лазерной плоскости.
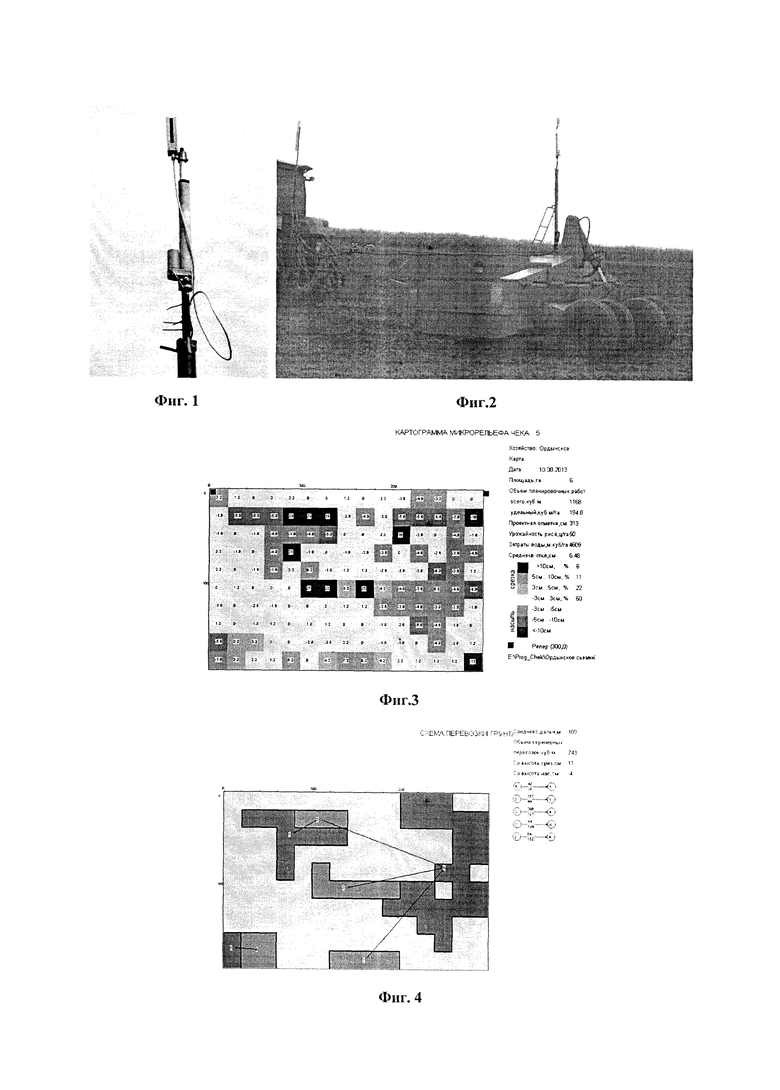
Актуатор (гидроцилиндр) предназначен для перемещения по высоте приемника относительно рабочего органа и состоит из цилиндра, внутри которого расположен шток, привода движения штока в виде электродвигателя с редуктором (масло гидросистемы) и переключателя направлений движения штока, находящегося в кабине трактора. Актуатор размещается на верхнем конце телескопической штанги, перемещаемой и закрепляемой стопором вручную относительно мачты, которая устанавливается неподвижно над режущей кромкой рабочего органа землеройно-планировочной машины [1]. Общие виды актуатора и его установка на машине с ЛСАУ (планировщик ПАУ-4,2Р) изображены на фиг. 1 и фиг. 2.
При указанном способе планировки землеройно-планировочная машина с ЛСАУ выполняет большие срезки грунта на повышениях, что сопровождается значительной перегрузкой двигателя машины, частой пробуксовкой ее движителя и вынужденной остановкой, что влечет за собой снижение надежности и срока службы машины, а также ограничивает применение маломощных машин (менее 150 л.с.). Актуатор имеет узкое применение и служит только для установки приемника на лазерную плоскость перед планировкой.
Целью изобретения является устранение этих недостатков.
Техническим результатом является равномерная загрузка двигателя землеройно-планировочной машины с ЛСАУ, снижение пробуксовки ее движителя, исключение остановок, повышение надежности и срока службы машины, который достигается за счет уменьшения величин срезок на всех уровнях планировки, устанавливаемых при помощи актуатора с цифровым индикатором. Еще одним техническим результатом является расширение применения маломощных машин и функциональных возможностей актуатора.
Поставленная цель достигается тем, что способ планировки земель, включающий срезку грунта в зонах повышений и отсыпку грунта в зонах понижений рабочим органом землеройно-планировочной машины с лазерным передатчиком, телескопической мачтой, актуатором, приемником, пультом управления, электрогидроблоком и исполнительным гидроцилиндром, отличающийся тем, что сначала планировку последовательно ведут сверху вниз на различных уровнях выше проектной отметки параллельно лазерной плоскости, а затем на уровне проектной отметки, причем установку и контроль уровня планировки осуществляют актуатором, снабженным датчиком измерений линейных перемещений штока актуатора с цифровым индикатором.
Использование предлагаемого способа планировки земель и работа устройства осуществляются следующим образом. Перед планировкой производят вертикальную съемку поверхности земли и по ее данным составляют проект планировки [1], состоящий из картограммы (фиг. 3) микрорельефа участка (рисового чека) с обозначением зон срезок и отсыпок грунта и зон нулевых работ (проектных отметок), где планировка не проводится, и схемы перемещения грунта (фиг. 4).
В начале планировки на участке устанавливают лазерный передатчик таким образом, чтобы лазерная плоскость располагалась выше кабины трактора во избежание перекрытия лазерного луча (фиг. 2). Землеройно-планировочную машину с ЛСАУ располагают в соответствии с проектом планировки (фиг. 3) в зоне нулевых работ и режущую кромку рабочего органа опускают на выбранную проектную отметку. Штоком мачты приемник сначала грубо поднимают вручную до лазерной плоскости и далее его центр точно вводят актуатором на лазерную плоскость по команде «Норма» на пульте управления. При этом на цифровом индикаторе актуатора фиксируется начальная контрольная высота приемника Но (например, при диапазоне хода штока устройства 40 см Но=24 см). Затем выбирают первый уровень планировки, расположенный выше проектной отметки на Δ1 (15 см), и актуатором приемник устанавливают по цифровому индикатору на высоте равной H1=Но-Δ1 (24-15=9 см), после чего приемник снова вводят на лазерную плоскость по командам ЛСАУ, что регистрируется командой «Норма» на пульте управления. Далее проводят планировку землеройно-планировочной машиной с ЛСАУ на первом уровне в соответствии со схемой перемещения грунта (фиг. 4). Аналогично последовательно выбирают второй Δ2 (10 см) и т.д. уровни планировки, устанавливая приемник актуатором по показаниям цифрового индикатора на высоте равной Н2=Но-Δ2 (24-10=14 см) и т.д. и проводят на них поочередно автоматическую планировку. В заключении приемник устанавливают актуатором на начальной контрольной высоте Но (24 см), соответствующей проектной отметке режущей кромки рабочего органа, вводят приемник по командам ЛСАУ на лазерную плоскость и ведут планировку на проектной отметке.
Обеспечение более равномерной загрузки двигателя землеройно-планировочной машины с ЛСАУ, снижение пробуксовки ее движителя, исключения остановок, повышение надежности и срока службы машины, а также расширение применения маломощных машин достигаются за счет уменьшения величин срезок на всех уровнях планировки, устанавливаемых при помощи актуатора с цифровым индикатором.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. А.Н. Ефремов. Лазерная планировка орошаемых земель. М.: ООО «Литера-Принт», 2016 - С. 52. Электронную версию этой брошюры в формате pdf можно скачать из Website: icluch.narod.ru, раздел «Новости», кликнув по ссылке: Скачать брошюру "Лазерная планировка орошаемых земель".
2. Патент на изобретение №2229216 «Способ планировки орошаемых земель», Бюл. 15 от 27.05.2004.
3. Патент на изобретение №2240681 «Способ планировки орошаемых земель и устройство для планировки орошаемых земель», Бюл. 22 от 10.08.2003.
4. Патент на изобретение №2572434 «Система управления рабочим органом землеройно-транспортной машины».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЛАНИРОВКИ ОРАШАЕМЫХ ЗЕМЕЛЬ И УСТРОЙСТВО ДЛЯ ПЛАНИРОВКИ ОРОШАЕМЫХ ЗЕМЕЛЬ | 2001 |
|
RU2240681C2 |
| СПОСОБ И УСТРОЙСТВО ПЛАНИРОВКИ ОРОШАЕМЫХ ЗЕМЕЛЬ | 2008 |
|
RU2399197C2 |
| СПОСОБ ПЛАНИРОВКИ ОРОШАЕМЫХ ЗЕМЕЛЬ И УСТРОЙСТВО ДЛЯ ПЛАНИРОВКИ ОРОШАЕМЫХ ЗЕМЕЛЬ | 1997 |
|
RU2131664C1 |
| Планировщик | 1990 |
|
SU1768718A1 |
| СПОСОБ ПЛАНИРОВКИ ОРОШАЕМЫХ ЗЕМЕЛЬ | 2001 |
|
RU2229216C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВЫСОТНЫМ ПОЛОЖЕНИЕМ РАБОЧЕГО ОРГАНА ДРЕНОУКЛАДЧИКА | 2017 |
|
RU2650007C1 |
| Устройство автоматической разгрузки грунта из ковша планировщика - скрепера | 2021 |
|
RU2762270C1 |
| Лазерная система автоматического управления и контроля глубины укладки дрен | 2020 |
|
RU2742807C1 |
| Почвообрабатывающее орудие | 1989 |
|
SU1724044A1 |
| СПОСОБ РЕМОНТНОЙ ПЛАНИРОВКИ ПОВЕРХНОСТИ ПОЛЯ МЕЛИОРАТИВНОЙ СИСТЕМЫ | 2006 |
|
RU2329632C2 |
Изобретение относится к сельскому хозяйству. Способ включает срезку грунта в зонах повышений и отсыпку грунта в зонах понижений рабочим органом землеройно-планировочной машины, оснащенной системой автоматического управления, состоящей из лазерного передатчика, формирующего лазерную опорную плоскость, телескопической мачты, актуатора, снабженного датчиком измерений линейных перемещений и цифровым индикатором, приемника, пульта управления и электрогидроблока. Автоматическую планировку участка (чека) ведут по разным по высоте плоскостям, параллельным лазерной опорной плоскости. Сначала на первой верхней плоскости, расположенной ниже верхних отметок максимальных повышений поверхности земли, затем на второй плоскости, расположенной последовательно ниже от первой плоскости, и в завершении на последней нижней плоскости, проходящей через проектную отметку участка, причем уровни планировки плоскостей относительно лазерной опорной плоскости задают путем установки приемника относительно рабочего органа на высоту, соответствующую каждой плоскости планировки. Толщины слоев планировки плоскостей регулируют и устанавливают по показаниям цифрового индикатора актуатора. Технический результат заключается в повышении надежности и срока службы машины. 4 ил.
Способ планировки земель, включающий срезку грунта в зонах повышений и отсыпку грунта в зонах понижений рабочим органом землеройно-планировочной машины, оснащенной системой автоматического управления, состоящей из лазерного передатчика, формирующего лазерную опорную плоскость, телескопической мачты, актуатора, снабженного датчиком измерений линейных перемещений и цифровым индикатором, приемника, пульта управления и электрогидроблока, отличающийся тем, что автоматическую планировку участка (чека) ведут по разным по высоте плоскостям, параллельным лазерной опорной плоскости, сначала на первой верхней плоскости, расположенной ниже верхних отметок максимальных повышений поверхности земли, затем на второй плоскости, расположенной последовательно ниже от первой плоскости, и в завершении на последней нижней плоскости, проходящей через проектную отметку участка, причем уровни планировки плоскостей относительно лазерной опорной плоскости задают путем установки приемника относительно рабочего органа на высоту, соответствующую каждой плоскости планировки, а толщины слоев планировки плоскостей регулируют и устанавливают по показаниям цифрового индикатора актуатора.
| СПОСОБ ПЛАНИРОВКИ ОРАШАЕМЫХ ЗЕМЕЛЬ И УСТРОЙСТВО ДЛЯ ПЛАНИРОВКИ ОРОШАЕМЫХ ЗЕМЕЛЬ | 2001 |
|
RU2240681C2 |
| Способ планировки орошаемых земель | 1988 |
|
SU1740560A1 |
| СПОСОБ ПЛАНИРОВКИ ОРОШАЕМЫХ ЗЕМЕЛЬ | 2001 |
|
RU2229216C2 |
| СПОСОБ ПЛАНИРОВКИ ОРОШАЕМЫХ ЗЕМЕЛЬ И УСТРОЙСТВО ДЛЯ ПЛАНИРОВКИ ОРОШАЕМЫХ ЗЕМЕЛЬ | 1997 |
|
RU2131664C1 |
| СПОСОБ ПЛАНИРОВКИ РЕЛЬЕФА СЕЛЬСКОХОЗЯЙСТВЕННОГО ПОЛЯ | 1991 |
|
RU2066523C1 |
| US 4173258 A1, 06.11.1979. | |||

