Область техники, к которой относится изобретение
Группа изобретений относится к системе тревожной сигнализации, измерительному модулю системы тревожной сигнализации, ободу колеса транспортного средства и центральному процессору системы тревожной сигнализации.
Предпосылки изобретения
Кражи колес транспортных средств со складов и/или непосредственно с транспортных средств вызывают огромные экономические и социальные потери.
Согласно известным техническим решениям защита от кражи колеса транспортного средства осуществляется посредством их механического закрепления с помощью соответствующих запорных приспособлений, которыми оснащены складские помещения, или с помощью установки на осях транспортного средства стопорных приспособлений или специальных замков, которые могут быть взломаны или открыты ключами или специальными инструментами.
Защита колес от краж, обеспечиваемая известными стопорными приспособлениями и специальными средствами, является недостаточно надежной, в чем заключается их недостаток. Поэтому полезно рассмотреть другие технические решения защиты колес транспортного средства от краж.
Сущность изобретения
Цель изобретения - создание удобной для пользователя системы тревожной сигнализации, которая обеспечивает надежную защиту колес транспортного средства от краж.
Особенностью изобретения является создание противоугонной системы тревожной сигнализации, которая содержит, по меньшей мере, один беспроводной измерительный модуль для определения информации о кинетическом состоянии, характеризующей кинетическое состояние колеса транспортного средства на основе измерения ускорения, причем беспроводной измерительный модуль конфигурирован так, что устанавливается на колесе транспортного средства и формирует беспроводной сигнал передачи данных на основе информации о кинетическом состоянии, и передает беспроводной сигнал передачи данных; и, по меньшей мере, один беспроводной центральный процессор, который принимает беспроводной сигнал передачи данных и осуществляет заданную функцию тревожной сигнализации, когда беспроводной сигнал передачи данных удовлетворяет заданным условиям.
Второй особенностью изобретения является создание измерительного модуля противоугонной системы тревожной сигнализации, который закрепляется на колесе транспортного средства и содержит: датчик движения для определения информации о кинетическом состоянии колеса транспортного средства; и первый блок беспроводной связи для формирования беспроводного сигнала передачи данных на основе информации о кинетическом состоянии и для передачи беспроводного сигнала передачи данных на центральный процессор системы тревожной сигнализации, который осуществляет заданную функцию аварийной сигнализации, когда беспроводной сигнал передачи данных удовлетворяет заданным условиям.
Третья особенность изобретения относится к ободу колеса транспортного средства, на котором устанавливается беспроводной измерительный модуль, содержащий: датчик движения для определения информации о кинетическом состоянии, характеризующей кинетическое состояние колеса транспортного средства на основе измерения ускорения; и первый блок беспроводной связи для формирования беспроводного сигнала передачи данных на основе информации о кинетическом состоянии и для передачи беспроводного сигнала передачи данных на центральный процессор системы тревожной сигнализации, который осуществляет заданную функцию тревожной сигнализации, когда беспроводной сигнал передачи данных удовлетворяет заданным условиям.
Другая особенность изобретения относится к центральному процессору системы тревожной сигнализации, который содержит: второй блок связи для приема беспроводного сигнала передачи данных, причем беспроводной сигнал передачи данных формируется беспроводным измерительным модулем, закрепленным на колесе транспортного средства, на основе информации о кинетическом состоянии, характеризующей кинетическое состояние колеса транспортного средства на основе измерения ускорения; и устройство тревожной сигнализации для осуществления заданной функции тревожной сигнализации, когда беспроводной сигнал передачи данных удовлетворяет заданным условиям.
Предпочтительные варианты реализации изобретения описаны в зависимых пунктах формулы изобретения.
Изобретение основано на том принципе, что измерительный модуль, закрепленный на колесе транспортного средства, представляет информацию о кинетическом состоянии колеса и на основе этой информации беспроводной измерительный модуль формирует беспроводной сигнал передачи данных и передает его в беспроводной центральный процессор. Беспроводной центральный процессор принимает беспроводной сигнал передачи данных и осуществляет тревожную сигнализацию, если сигнал передачи данных удовлетворяет заданным условиям.
Предлагаемая система тревожной сигнализации имеет ряд преимуществ. Одним из них является защита от кражи в реальном времени посредством дистанционной подачи тревожного сигнала на беспроводной процессор.
Краткое описание чертежей
Далее приводится более подробное описание изобретения на примере предпочтительных вариантов изобретения со ссылкой на сопроводительные чертежи, в которых:
Фиг.1 представляет первый пример схемы системы тревожной сигнализации;
Фиг.2 представляет первый пример схемы беспроводного измерительного модуля;
Фиг.3 представляет первый пример схемы беспроводного центрального процессора;
Фиг.4 представляет второй пример схемы системы тревожной сигнализации;
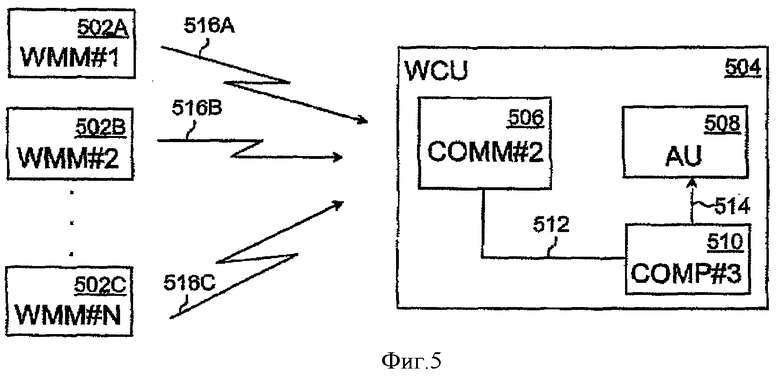
Фиг.5 представляет третий пример схемы системы тревожной сигнализации;
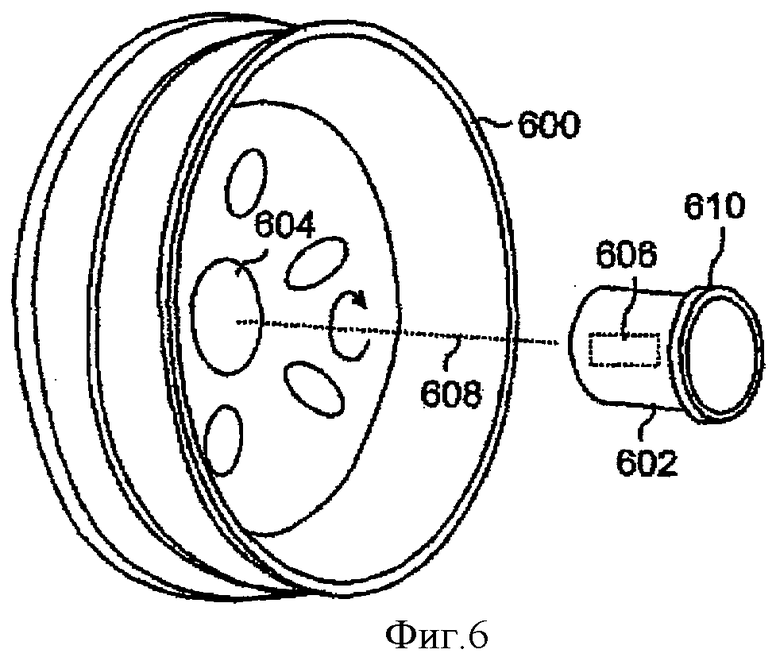
Фиг.6 представляет пример варианта реализации обода колеса транспортного средства.
Подробное описание вариантов реализации изобретения
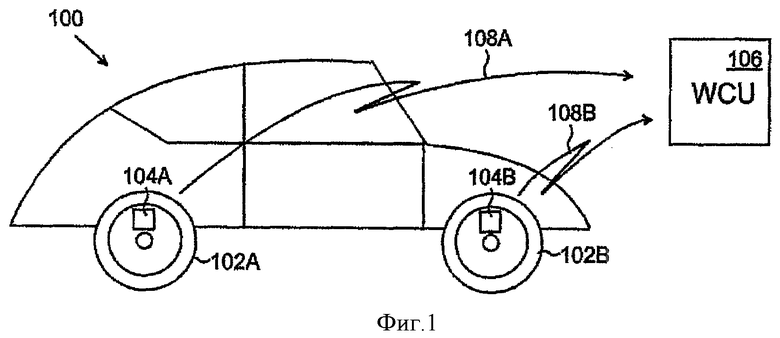
Согласно Фиг.1 система тревожной сигнализации содержит: беспроводные измерительные модули 104А, 104В, закрепленные на колесах 102А, 102В транспортного средства 100. Кроме этого, система тревожной сигнализации содержит беспроводной центральный процессор 106 (WCU).
Транспортным средством 100 может быть автомобиль, грузовик, мотоцикл и/или прицеп (трейлер). Настоящее техническое решение не ограничивается, однако, этими примерами, и транспортными средствами могут являться любые средства транспортировки, снабженные колесами, которые следует защищать от кражи.
Колесо 102А, 102В транспортного средства содержит, по меньшей мере, обод колеса. Также подразумевается, что колесо 102А, 102В содержит шину, которая может быть изготовлена из резины.
Беспроводной измерительный модуль 104А, 104В получает информацию о кинетическом состоянии на основе измеренного ускорения колеса 102А, 102В транспортного средства 100. Информация о кинетическом состоянии характеризует кинетическое состояние колеса 102А, 102В. Беспроводной измерительный модуль 104А, 104В формирует беспроводной сигнал 108А, 108В передачи данных на основе информации о кинетическом состоянии и подает беспроводной сигнал 108А, 108В передачи данных на беспроводной центральный процессор 106.
Беспроводной центральный процессор 106 принимает беспроводной сигнал 108А, 108В передачи данных и выполняет заданную функцию тревожной сигнализации, когда сигнал 108А, 108В передачи данных удовлетворяет заданным условиям.
Информация о кинетическом состоянии содержит в себе ускорение в одном или более направлении, скорость в одном или более направлении, скорость вращения в одном или более направлении и/или частоту вибрации в одном или более направлении. В варианте реализации информация о кинетическом состоянии показывает, находится ли колесо 102А 102В в состоянии движения или нет. Однако представленное техническое решение не ограничивается примерами описанной здесь информации о кинетическом состоянии, которая может быть любого рода информацией о кинетическом состоянии колеса 102А, 102В транспортного средства.
Беспроводной центральный процессор 106 может устанавливаться в транспортном средстве 100. В этом случае беспроводной центральный процессор может использовать устройства транспортного средства 100, такие как пользовательский интерфейс и источник питания.
Настоящее техническое решение может применяться для мониторинга колес 102А, 102В, установленных на транспортном средстве 100 и/или колес 102А, 102В, хранящихся на складе.
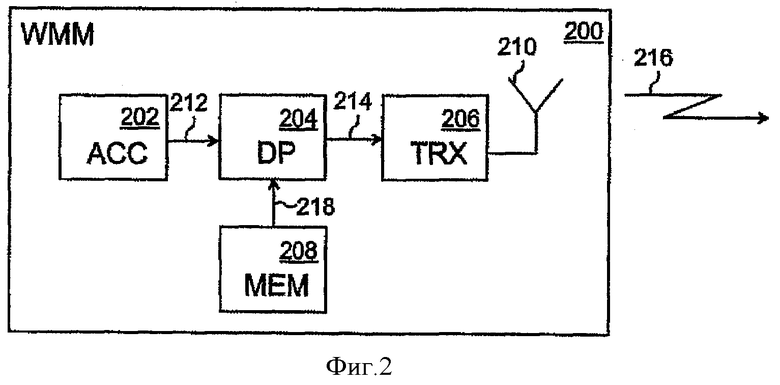
Согласно Фиг.2 беспроводной измерительный модуль 200 обычно содержит приемопередатчик (TRX) 206, цифровой процессор (DP) 204, соединенный с приемопередатчиком 206, блок памяти (MEM) 208, соединенный с цифровым процессором 204, и датчик ускорения (АСС) 202, соединенный с цифровым процессором 204.
В качестве первичной переменной измеряется информация об ускорении 212 в одном или более направлении посредством датчика ускорения 202. Информация об ускорении 212 передается на цифровой процессор 204, который формирует информацию о кинетическом состоянии 214 на основании информации об ускорении 212.
Цифровой процессор 204 может загружать компьютерную программу 218 из блока памяти 208, причем компьютерная программа содержит кодированные команды для выполнения компьютерных операций в цифровом процессоре 204. Компьютерная операция может заключать в себе информацию 214 о кинетическом состоянии на основании информации об ускорении 212.
В качестве датчика ускорения может использоваться, например, пьезоэлектрический датчик ускорения. Конструкция и принцип действия датчиков ускорения хорошо известны специалистам, поэтому нет необходимости в данном контексте рассматривать подробно этот вопрос.
Цифровой процессор 204 передает информацию 214 о кинетическом состоянии в приемопередатчик 206, посредством которого информация 214 о кинетическом состоянии преобразовывается в сигнал 216 беспроводной связи, который передается через антенну 210.
Сигнал 216 беспроводной связи может быть радиочастотным сигналом, в этом случае приемопередатчик 206 обычно содержит радиопередатчик.
В варианте реализации радиопередатчик основан на технологии в соответствии со спецификацией Блютус.
Во втором варианте реализации радиопередатчик осуществляет беспроводную локальную сеть (WLAN, беспроводная локальная сеть доступа) (WPAN, беспроводная персональная сеть), которая может быть основана, например, на протоколе стандарта IEEE 802.15.4. В варианте реализации радиопередатчик осуществляет интерфейс ZigBee.
В варианте реализации сигнал 216 беспроводной связи основан на использовании магнитной составляющей электромагнитного поля. В этом случае антенна 210 обычно заменяется катушкой индуктивности. Изменяющаяся частота электромагнитного поля может составить 100 кГц, хотя представленное техническое решение не ограничивается этим диапазоном частот.
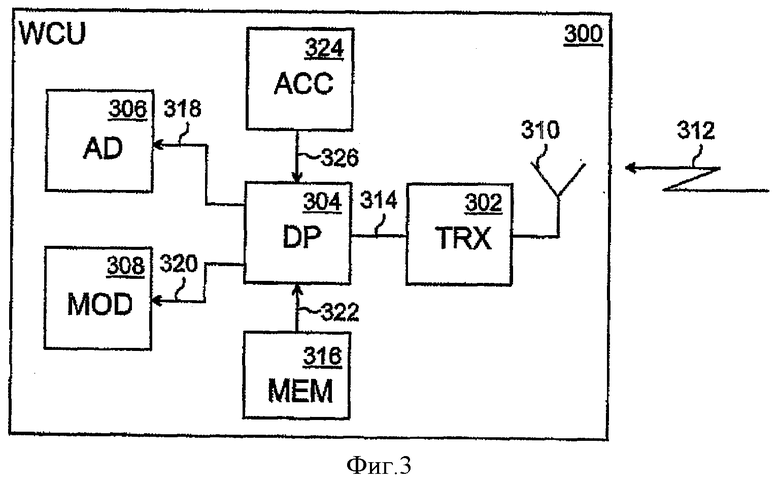
В соответствии с Фиг.3 беспроводной центральный процессор 300 содержит антенну 310, приемопередатчик (TRX) 302, цифровой процессор (DP) 304, соединенный с приемопередатчиком 302, блок памяти 316, соединенный с цифровым процессором 304, устройство тревожной сигнализации (AD) 306, соединенное с цифровым процессором 304, и датчик движения (АСС) 324, соединенный с цифровым процессором 304.
Приемопередатчик 302 может осуществить беспроводной интерфейс, основанный на технологии BlueTooth, WLAN, WPAN, ZigBee или магнитной передаче данных.
Приемопередатчик 302 принимает беспроводной сигнал передачи данных через антенну 310. Приемопередатчик 302 подает информацию 314, заключенную в беспроводной сигнал 312 передачи данных, в цифровой процессор 304.
Цифровой процессор 304 выполняет компьютерные операции на основе кодированных команд 322, полученных из блока памяти 316. Компьютерная операция представляет собой обработку информации 314.
Цифровой процессор 304 передает сигнал 318 тревожной сигнализации в устройство 306 тревожной сигнализации, если сигнал 312 передачи данных беспроводной связи удовлетворяет заданным условиям.
Датчик 324 движения измеряет показатели движения беспроводного центрального процессора 300 и передает измеренную информацию о кинетическом состоянии в цифровой процессор 304.
Устройство 306 тревожной сигнализации может содержать, например, звуковое сигнальное устройство и/или световое сигнальное устройство. В устройстве 306 тревожной сигнализации могут использоваться системы, установленные на транспортном средстве 100, такие как звуковые и/или световые сигнальные устройства.
В варианте реализации беспроводной центральный процессор 300 содержит радиомодем 308, который осуществляет беспроводную связь от беспроводного центрального процессора 300 к базовой станции радиосистемы. Радиосистемой является, например, GSM (глобальная система мобильной связи).
Радиомодем 308 может принимать сигнал 320 индикации тревоги из цифрового процессора 304 и выдавать дистанционный сигнал тревоги в заданную точку доступа на основе сигнала 320 индикации тревоги.
В варианте реализации беспроводной центральный процессор 300 представляет собой компьютер, приемопередатчиком сигнала 320 которого может быть, например, сетевая плата, осуществляющая подключение согласно технологии BlueTooth беспроводной локальной сети. В этом случае радиомодем 308 может быть заменен сетевой платой, которая осуществляет подключение к Интернету. Одна и та же беспроводная сетевая плата может использоваться как для того, чтобы передавать сигнал 312 передачи данных, так и для подключения к Интернету. Компьютер может быть, например, портативным компьютером (ноутбук) или настольным компьютером (PC).
В варианте реализации беспроводной центральный процессор 300 является мобильным телефоном, персональным электронным ассистентом (PDA) или каким-либо другим портативным электронным устройством, которое осуществляет беспроводной интерфейс, необходимый для того, чтобы передавать сигнал 312 передачи данных.
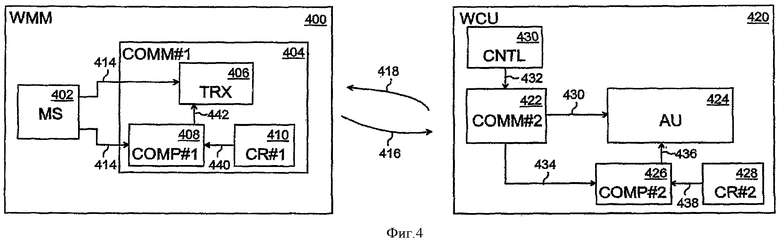
Согласно Фиг.4 беспроводной измерительный модуль 400 системы тревожной сигнализации содержит первый блок 404 беспроводной связи (СОММ#1) и датчик движения (MS) 402, соединенный с первым блоком 404 беспроводной связи.
В варианте реализации датчик движения 402 определяет информацию 414 о кинетическом состоянии, характеризующую движение транспортного средства 100, на основе измерения ускорения и подает информацию 414 о кинетическом состоянии на первый блок 404 беспроводной связи.
В варианте реализации беспроводной измерительный модуль 400 содержит первый сравнительный регистр (CR#1) 410, в котором заключена информация об опорных показателях кинетического состояния колеса 102А, 102В транспортного средства 100. Информация 440 об опорных показателях характеризует обычно кинетическое состояние транспортного средства 100 в нормальном режиме эксплуатации, причем кинетическое состояние определяется поступательным движением, вращательным движением и/или вибрацией колеса 102А, 102В. В варианте реализации характеристикой кинетического состояния колеса транспортного средства является устойчивое состояние, в этом случае опорная информация определяется движением колеса в установившемся состоянии. Информация 440, содержащая опорные показатели, может быть закодирована в сравнительном регистре 410 как скорость, что относится к поступательному движению, как скорость вращения, что относится к вращательному движению, и/или как частота, что относится к вибрации. Сравнительный регистр 410 также может содержать предельные значения вышеупомянутых физических показателей, т.е. нижнее предельное значение и/или верхнее предельное значение.
Опорная информация может быть введена в память сравнительного регистра 410 перед использованием, например, в стадии производства системы тревожной сигнализации.
В варианте реализации беспроводной измерительный модуль 400 также содержит первый сравнительный блок (СОМР#1) 408 для выполнения сравнения информации 414 о кинетическом состоянии с опорной информацией 440.
В варианте реализации измерительный датчик движения 402 подает информацию 414 о кинетическом состоянии на первый сравнительный блок 408. Сравнительный блок 408 может загружать опорную информацию 440 из первого сравнительного регистра 410.
Первый сравнительный блок 408 сравнивает информацию 414 о кинетическом состоянии с опорной информацией 440, например, посредством вычисления разницы между измеренной скоростью вращения и скоростью вращения, введенной в память сравнительного регистра 410. Соответствующее сравнение может также выполняться между другими измеренными параметрами информации 414 о кинетическом состоянии и опорной информацией 440.
Если результат сравнения информации 414 о кинетическом состоянии с опорной информацией 440 удовлетворяет заданным условиям, то первый сравнительный блок 408 подает сигнал 442 индикации тревоги на приемопередатчик 406, который вводит сигнал 442 индикации тревоги в беспроводной сигнал 416 передачи данных и передает беспроводной сигнал 416 передачи данных в беспроводной центральный процессор 420. Сигнал 442 индикации тревоги может означать, что колесо транспортного средства 100 движется без разрешения.
Первый блок 404 связи беспроводного измерительного модуля 400 может быть осуществлен посредством компьютерной программы, исполненной приемопередатчиком 206 и цифровым процессором 204, изображенным на Фиг.2, и введенной в память блока 208.
Измерительный датчик 402 беспроводного измерительного модуля 400 может быть осуществлен с помощью компьютерной программы, исполненной датчиком 202 ускорения и цифровым процессором 204, изображенным на Фиг.2, введенной в память блока 208.
Первый сравнительный регистр 410 может быть осуществлен посредством программы, исполненной цифровым процессором 204, изображенным на Фиг.2, и введенной в память блока 208.
Первый сравнительный блок 408 может быть осуществлен посредством компьютерной программы, исполненной цифровым процессором 204, изображенным на Фиг.2, и введенной в память блока 208.
В варианте изобретения беспроводной центральный процессор 420 содержит второй блок (СООМ#2) 422 беспроводной связи, который принимает беспроводной сигнал 416 передачи данных. Второй блок 422 беспроводной связи декодирует сигнал 436 индикации тревожной сигнализации из беспроводного сигнала 416 передачи данных и передает сигнал 436 тревожной сигнализации в блок 424 тревожной сигнализации.
Блок 424 тревожной сигнализации выполняет заданные функции тревожной сигнализации на основе сигнала 436 тревожной сигнализации. Заданная функция тревожной сигнализации может состоять из звукового и/или светового сигнала, подаваемого сигнализирующим устройством. Заданная функция тревожной сигнализации может также включать в себя дистанционную тревожную сигнализацию, передаваемую посредством радиомодема 308 по заданному адресу назначения.
В варианте реализации беспроводной центральный процессор 420 содержит контроллер (CTRL) 430 для формирования информации 432 управления. Контроллер 430 подает информацию 432 управления на второй блок 422 беспроводной связи, который вводит информацию 432 управления в беспроводной сигнал 418 информации управления и передает беспроводной сигнал 418 информации управления на беспроводной измерительный модуль 400.
Первый блок 404 беспроводной связи принимает беспроводной сигнал 418 информации управления и формирует беспроводной сигнал 416 передачи данных на основе информации 432 управления.
Информация 432 управления может содержать опорную информацию 440, которая обновляется в первом сравнительном регистре 410, и/или информацию управления на приемопередатчике 406 для того, чтобы управлять частотой сигнала, кодированием сигнала и/или временным интервалом беспроводного сигнала 416 передачи данных.
В варианте реализации информация 414 о кинетическом состоянии поступает на приемопередатчик 406, который вводит информацию 414 о кинетическом состоянии в беспроводной сигнал 416 передачи данных и передает сигнал 416 передачи данных на второй блок 422 беспроводной связи беспроводного центрального процессора 420.
Второй блок 422 беспроводной связи принимает беспроводной сигнал 416 передачи данных, декодирует информацию 434 о кинетическом состоянии из беспроводного сигнала 416 передачи данных и подает информацию 434 о кинетическом состоянии во второй сравнительный блок 426 беспроводного центрального процессора 420.
Второй сравнительный блок 426 осуществляет выборку опорной информации 438 из второго сравнительного регистра 428 и сравнивает эту информацию с информацией 434 о кинетическом состоянии. Если сравнение удовлетворяет заданным условиям, то второй сравнительный блок 426 формирует сигнал 436 индикации тревоги и подает сигнал индикации тревоги на блок 424 тревожной сигнализации.
Блок 424 тревожной сигнализации может выполнять заданные функции после того, как он примет сигнал 436 индикации тревоги.
Второй сравнительный блок 426 может быть осуществлен как компьютерный процесс в цифровом процессоре 304, изображенном на Фиг.3, причем закодированные команды для компьютерного процесса сохраняются в блоке памяти 316.
Второй блок 422 беспроводной связи может быть осуществлен посредством компьютерной программы, выполненной приемопередатчиком 302 и цифровым процессором 304, изображенным на Фиг.3, и сохраненной в блоке памяти 316.
Блок 424 аварийной сигнализации может быть осуществлен посредством компьютерной программы, выполненной устройством 306 тревожной сигнализации, радиомодемом 308 и цифровым процессором 304, показанным на Фиг.3, и сохраненной в блоке памяти 316.
Контроллер 430 может быть осуществлен посредством компьютерной программы, выполненной цифровым процессором 304, изображенным на Фиг.3, и сохраненной в блоке памяти 316.
Второй сравнительный блок 426 может быть осуществлен посредством компьютерной программы, выполненной цифровым процессором 304, изображенным на Фиг.3, и сохраненной в блоке памяти 316.
Второй сравнительный регистр 428 может быть осуществлен посредством компьютерной программы, выполненной цифровым процессором 304, изображенным на Фиг.3, и сохраненной в блоке памяти 316.
В варианте реализации первый и/или второй сравнительный регистр 410, 428 может обновляться посредством опорной информации о кинетическом состоянии, измеренном датчиком движения центрального процессора 420. Датчиком движения может служить датчик движения 324, показанный на Фиг.3. Если центральный процессор расположен в транспортном средстве 100, то второй сравнительный блок 426 может сравнивать кинетическое состояние беспроводного измерительного модуля 400 с кинетическим состоянием транспортного средства 100. Если кинетические состояния различаются, то результат может рассматриваться как факт кражи колеса 102А, 102В, и в этом случае выполняется срабатывание тревожной сигнализации.
Согласно примеру на Фиг. 5 в этом варианте реализации система аварийной сигнализации содержит несколько беспроводных измерительных модулей (WMM#1, WMM#2,…WMM#N) 502A, 502В, 502С, которые имеют такую же конструкцию, как беспроводной измерительный модуль 200 на Фиг.2 и беспроводной измерительный модуль 400 на Фиг.4. Каждый измерительный модуль 502A, 502В, 502С конфигурирован так, чтобы крепиться к колесу 102А и колесу 102В транспортного средства 100, причем колеса соединены с транспортным средством и/или хранятся на складах.
Каждый беспроводной измерительный модуль 502A-502С формирует беспроводной сигнал 516А-516С передачи данных и подает беспроводной сигнал 516А-516С передачи данных на беспроводной центральный процессор 504.
Беспроводной сигнал 516А-516С может быть снабжен определенным идентификатором измерительного модуля, который может быть осуществлен посредством частоты или интервала времени беспроводного сигнала 516А-516С передачи данных или посредством кода, включенного в беспроводной сигнал 516А-516С передачи данных.
Второй блок связи 506 может принимать беспроводные сигналы 516А-516С передачи данных и формировать входной сигнал 512 из беспроводных сигналов 516А-516С передачи данных, который подается на третий сравнительный блок (СОМР#3) 510. Третий сравнительный блок 510 может быть осуществлен посредством компьютерной программы, выполненной цифровым процессором 304 Фиг.3 и сохранен в блоке памяти 316.
Третий сравнительный блок 510 сравнивает содержание информации сигналов 516А-516С друг с другом и подает результат 514 сравнения в блок 508 тревожной сигнализации.
Блок 508 тревожной сигнализации выполняет заданные функции тревожной сигнализации, когда результат сравнения удовлетворяет заданным условиям.
В варианте реализации беспроводные сигналы 516А-516С передачи данных содержат информацию 414 о кинетическом состоянии. В этом случае вход 512 содержит информацию 414 о кинетическом состоянии, и третий сравнительный блок 510 производит сравнение частей информации 414, определяемых разными беспроводными измерительными модулями 502А-502С, друг с другом. Если части информации 414 о кинетическом состоянии, принятые от разных беспроводных измерительных модулей 502А-502С, очень близки, то результат сравнения свидетельствует о том, что транспортное средство движется нормально, припарковано или что колеса 102А, 102В находятся на хранении, и не произошло кражи.
Функция тревожной сигнализации может быть выполнена, если присутствует отклонение от заданной величины частей информации 414 о кинетическом состоянии, выданных измерительными модулями 502А-502С.
В соответствии с примером на Фиг.6 в одном варианте реализации обод 600 содержит соединительное устройство 602 на оси вращения 608 обода 600 для соединения беспроводного измерительного модуля 606 с ободом 600. Ось вращения 608 обода может быть осью вращения колеса 102А, 102В транспортного средства 100. В варианте реализации соединительное устройство 602 является капсулой, которая вставляется в центральное отверстие 604 обода со стороны оси транспортного средства 100. Соединительное устройство 602 может содержать гребень 610, который предотвращает движение соединительного устройства 602 через центральное отверстие 604 за пределы обода 600, когда обод 600 установлен в транспортном средстве. В этом случае трудно удалить беспроводной измерительный модуль 606 из капсулы без удаления обода 600 из транспортного средства 100. Более того, снять обод 600 с транспортного средства 100 очень трудно, не вызывая при этом движения беспроводного измерительного модуля 606 и соответственно тревожной сигнализации. Соединительное устройство 602 может также крепиться на ободе 600, в этом случае беспроводной измерительный модуль 606 также располагается в соединительном устройстве, когда система тревожной сигнализации используется для контроля колес и/или ободов 600, которые находятся на хранении.
Показанный на Фиг.4 датчик движения 402 может быть конфигурирован так, чтобы определять информацию о кинетическом состоянии зоны вблизи оси вращения 608 обода. Конфигурация может содержать определение размеров датчика 202 ускорения и адаптацию компьютерной программы для выполнения обработки информации о кинетическом состоянии так, например, чтобы принималась во внимание близость оси вращения 608. Близость оси вращения 608 дает возможность использовать чувствительные датчики 202 ускорения, так как близость оси вращения уменьшает центробежную силу, направленную на датчик 202 ускорения. Конфигурация датчика 402 движения может также содержать ориентацию датчика 402 движения относительно оси вращения 608 так, чтобы степени свободы движения, такие как степени свободы вращения, степени свободы колебательного движения и степени свободы прямолинейного движения, были, насколько это возможно, отличимыми друг от друга. Это сокращает объем обработки информации о кинетическом состоянии.
Хотя изобретение было описано на примере согласно прилагаемым чертежам, понятно, что этим изобретение не ограничивается и может быть различным образом модифицировано в пределах объема прилагаемой формулы изобретения.
Группа изобретений относится к технике предотвращения кражи колес транспортного средства. Система содержит по меньшей мере один беспроводный измерительный модуль для определения информации о кинетическом состоянии, характеризующей кинетическое состояние колеса транспортного средства на основе измерения ускорения. Беспроводный измерительный модуль устанавливается на колесе транспортного средства, формирует сигнал беспроводной передачи данных на основе информации о кинетическом состоянии и передает этот сигнал. Также система содержит, по меньшей мере, один беспроводный центральный процессор, который конфигурирован для приема сигнала беспроводной передачи данных и выполнения заданной функции тревожной сигнализации, когда сигнал удовлетворяет заданным условиям. Группа изобретений позволяет создать удобную для пользователя систему тревожной сигнализации, которая обеспечивает надежную защиту колес транспортного средства от краж. 3 н. и 10 з.п. ф-лы, 6 ил.
1. Система тревожной сигнализации от кражи колес транспортного средства, содержащая:
по меньшей мере один беспроводный измерительный модуль (104А, 104В, 200, 400, 502А-502С, 606) для определения информации о кинетическом состоянии, характеризующей кинетическое состояние колеса транспортного средства на основе измерения ускорения, причем беспроводный измерительный модуль (104А, 104В, 200, 400, 502А - 502С, 606) установлен на колесе транспортного средства с возможностью формирования сигнала беспроводной передачи данных на основе информации о кинетическом состоянии и передачи этого сигнала, и
по меньшей мере один беспроводный центральный процессор (106, 300, 420, 504), выполненный с возможностью приема сигнала беспроводной передачи данных и выполнения заданной функции тревожной сигнализации в случае, когда сигнал беспроводной передачи данных удовлетворяет заданным условиям, отличающаяся тем, что дополнительно содержит по меньшей мере одно соединительное устройство (602), выполненное с возможностью соединения беспроводного измерительного модуля (104А, 104В, 200, 400, 502А-502С, 606) с центральным отверстием (604) обода колеса транспортного средства, при этом соединительное устройство содержит гребень, который предотвращает снятие соединительного устройства и беспроводного измерительного модуля с обода без снятия обода с транспортного средства, а беспроводный измерительный модуль выполнен с возможностью определения информации о кинетическом состоянии зоны, близкой к оси вращения колеса транспортного средства.
2. Система по п.1, отличающаяся тем, что
беспроводный центральный процессор (420) выполнен с возможностью ввода управляющей информации в состав сигнала информации беспроводного управления и передачи сигнала информации беспроводного управления;
беспроводный измерительный модуль (400) выполнен с возможностью приема сигнала информации беспроводного управления и
беспроводный измерительный модуль (400) выполнен с возможностью формирования сигнала беспроводной передачи данных на основе управляющей информации.
3. Система по п.1, отличающаяся тем, что содержит:
несколько беспроводных измерительных модулей (502А, 502В, 502С) для определения информации о кинетическом состоянии, характеризующей движение колеса транспортного средства на основе измерения ускорения, причем каждый из беспроводных измерительных модулей (502А, 502В, 502С) выполнен с возможностью установки на отдельном колесе транспортного средства, формирования сигнала беспроводной передачи данных на основе информации о кинетическом состоянии и передачи сигнала беспроводной передачи данных;
центральный процессор (504) выполнен с возможностью приема нескольких сигналов беспроводной передачи данных;
центральный процессор (504) выполнен с возможностью сравнения нескольких сигналов беспроводной передачи данных и
центральный процессор (504) выполнен с возможностью выполнения заданной функции тревожной сигнализации, когда результат сравнения отвечает заданным условиям.
4. Система по п.1, отличающаяся тем, что
беспроводный измерительный модуль (400) также содержит первый сравнительный регистр (410), в котором содержится опорная информация, характеризующая показатели кинетического состояния колеса транспортного средства;
беспроводный измерительный модуль (400) выполнен с возможностью сравнения информации о кинетическом состоянии с опорной информацией;
беспроводный измерительный модуль (400) выполнен с возможностью ввода сигнал индикации тревоги в сигнал беспроводной передачи данных, когда сравнение отвечает заданным условиям, и
беспроводный центральный процессор (420) выполнен с возможностью выполнения заданной функции тревожной сигнализации на основе сигнала индикации тревоги.
5. Система по п.1, отличающаяся тем, что
беспроводный измерительный модуль (400) конфигурирован для ввода информации о кинетическом состоянии в сигнал беспроводной передачи данных;
беспроводный центральный процессор (420) также содержит второй регистр сравнения (428), в котором содержится опорная информация, характеризующая показатели кинетического состояния колеса транспортного средства;
беспроводный центральный процессор (420) выполнен с возможностью выполнения сравнения информации о кинетическом состоянии с опорной информацией и
беспроводный центральный процессор (420) выполнен с возможностью выполнения заданной функции тревожной сигнализации, когда результат сравнения удовлетворяет заданным условиям.
6. Измерительный модуль системы тревожной сигнализации, предназначенный для установки на колесе транспортного средства и содержащий:
датчик (402) движения для определения информации о кинетическом состоянии, характеризующей кинетическое состояние колеса транспортного средства, и
первый блок (404) беспроводной связи для формирования сигнала беспроводной передачи данных на основе информации о кинетическом состоянии и для подачи сигнала беспроводной передачи данных на центральный процессор системы тревожной сигнализации, который выполняет заданную функцию тревожной сигнализации, когда сигнал беспроводной передачи данных отвечает заданным условиям,
отличающийся тем, что дополнительно содержит по меньшей мере одно соединительное устройство (602), выполненное с возможностью соединения беспроводного измерительного модуля (104А, 104В, 200, 400, 502А-502С, 606) с центральным отверстием (604) обода колеса транспортного средства, при этом соединительное устройство содержит гребень, который предотвращает снятие соединительного устройства и беспроводного измерительного модуля с обода без снятия обода с транспортного средства, а беспроводный измерительный модуль выполнен с возможностью определения информации о кинетическом состоянии зоны, близкой к оси вращения колеса транспортного средства.
7. Измерительный модуль по п.6, отличающийся тем, что
первый блок (404) беспроводной связи выполнен с возможностью приема сигнала информации беспроводного управления, содержащего управляющую информацию, и
первый блок (404) беспроводной связи выполнен с возможностью формирования сигнала беспроводной передачи данных на основе управляющей информации.
8. Измерительный модуль по п.6, отличающийся тем, что измерительный модуль также содержит:
первый регистр сравнения (410), который содержит опорную информацию, характеризующую показатели кинетического состояния колеса транспортного средства;
первый блок сравнения (408) для выполнения сравнения информации о кинетическом состоянии с опорной информацией и
первый блок (404) беспроводной связи, выполненный с возможностью ввода сигнала индикации тревоги в сигнал беспроводной передачи данных, когда результат сравнения удовлетворяет заданным условиям.
9. Измерительный модуль по п.6, отличающийся тем, что первый блок (404) беспроводной связи выполнен с возможностью ввода информации о кинетическом состоянии в сигнал беспроводной связи.
10. Обод колеса транспортного средства, содержащий беспроводный измерительный модуль (104А, 104В, 200, 400, 502А-502С, 606), который содержит:
датчик (402) движения для определения информации о кинетическом состоянии, характеризующей кинетическое состояние колеса транспортного средства на основе измерения ускорения, и
первый блок (404) беспроводной связи для формирования сигнала беспроводной передачи данных на основе информации о кинетическом состоянии и для подачи сигнала беспроводной передачи данных на центральный процессор системы тревожной сигнализации, который конфигурирован для выполнения заданной функции тревожной сигнализации, когда сигнал беспроводной передачи данных удовлетворяет заданным условиям,
отличающийся тем, что дополнительно содержит по меньшей мере одно соединительное устройство (602), выполненное с возможностью соединения беспроводного измерительного модуля (104А, 104В, 200, 400, 502А-502С, 606) с центральным отверстием (604) обода колеса транспортного средства, при этом соединительное устройство содержит гребень, который предотвращает снятие соединительного устройства и беспроводного измерительного модуля с обода без снятия обода с транспортного средства, а беспроводный измерительный модуль выполнен с возможностью определения информации о кинетическом состоянии зоны, близкой к оси вращения колеса транспортного средства.
11. Обод по п.10, отличающийся тем, что
первый блок (404) беспроводной связи выполнен с возможностью приема сигнала информации беспроводного управления, содержащего управляющую информацию, и
первый блок (404) беспроводной связи выполнен с возможностью формирования сигнала беспроводной передачи данных на основе управляющей информации.
12. Обод по п.10, отличающийся тем, что беспроводный измерительный модуль (104А, 104В, 200, 400, 502А-502С, 606) также содержит:
первый регистр сравнения (410), который содержит опорную информацию, характеризующую показатели кинетического состояния колеса транспортного средства;
первый блок сравнения (408) для выполнения сравнения информации о кинетическом состоянии с опорной информацией и
первый блок (404) беспроводной связи, выполненный с возможностью ввода сигнала индикации тревоги в сигнал беспроводной передачи данных, когда результат сравнения удовлетворяет заданным условиям.
13. Обод по п.10, отличающийся тем, что первый блок (404) беспроводной связи конфигурирован для ввода информации о кинетическом состоянии в сигнал беспроводной связи.
| JP 2004198185 А, 15.07.2004 | |||
| ТУРБИНА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2008 |
|
RU2382205C1 |
| US 4947151 А, 07.08.1990 | |||
| ЕР1172236 А2, 16.01.2002 | |||
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 1995 |
|
RU2088442C1 |

