Область техники, к которой относится изобретение
Изобретение относится к контролирующей системе для колес транспортного средства и беспроводному измерительному модулю.
Уровень техники
Состояние колес транспортного средства является существенным фактором в безопасности трафика, поэтому так важно контролировать состояние колес для предотвращения аварий.
В существующих решениях состояние колес транспортного средства контролируется визуально и может быть проконтролировано с помощью внешних измерительных средств.
Недостатки известных решений включают в себя человеческие ошибки, такие как пренебрежение контролем или неверная интерпретация измерительных устройств. Таким образом, полезно рассмотреть альтернативные пути контроля колес транспортного средства.
Сущность изобретения
Цель изобретения состоит в создании контролирующей системы для колес транспортного средства и беспроводного измерительного модуля, позволяющего эффективно контролировать колеса транспортного средства.
Первый объект изобретения обеспечивает создание контролирующей системы для контроля колес транспортного средства, содержащей по меньшей мере один измерительный модуль, выполненный с возможностью прикрепления к колесу транспортного средства и содержащий: блок измерения ускорения для определения информации ускорения, связанной с движением колеса транспортного средства; блок определения состояния для нахождения значения по меньшей мере одного параметра, характеризующего особенность или состояние колеса транспортного средства с помощью информации ускорения; и блок связи модуля для передачи значения упомянутого по меньшей мере одного параметра посредством беспроводного сигнала связи.
Второй объект изобретения обеспечивает создание беспроводного измерительного модуля, выполненного с возможностью прикрепления к колесу транспортного средства и содержащего: блок измерения ускорения для нахождения информации ускорения, связанной с движением колеса транспортного средства; блок определения состояния для нахождения значения по меньшей мере одного параметра, характеризующего особенность или состояние колеса транспортного средства с помощью информации ускорения; и блок связи модуля для передачи значения упомянутого по меньшей мере одного параметра посредством беспроводного сигнала связи.
Предпочтительные варианты осуществления изобретения раскрыты в зависимых пунктах.
Изобретение основано на том факте, что беспроводной измерительный модуль, прикрепленный к колесу транспортного средства, измеряет информацию ускорения, связанную с движением колеса, на основе чего находится значение параметра, характеризующего особенность или состояние колеса транспортного средства. В варианте осуществления параметр может передаваться по беспроводному соединению для передачи данных в центральный процессор, где параметр может обрабатываться.
Контролирующая система и беспроводной измерительный модуль по изобретению обеспечивают множество преимуществ. Одно преимущество по изобретению позволяет автоматически контролировать колеса транспортного средства во время езды.
Краткое описание чертежей
Изобретение будет описано подробнее со ссылкой на предпочтительные варианты осуществления и сопровождающие чертежи, на которых:
фиг.1 иллюстрирует первый пример структуры контролирующей системы для колес транспортного средства;
фиг.2 иллюстрирует пример структуры беспроводного измерительного модуля;
фиг.3 иллюстрирует пример структуры центрального процессора;
фиг.4 иллюстрирует пример физических процессов во время вращения колеса;
фиг.5 иллюстрирует первый пример ускорения колеса транспортного средства; и
фиг.6 иллюстрирует второй пример ускорения колеса транспортного средства.
Описание вариантов осуществления
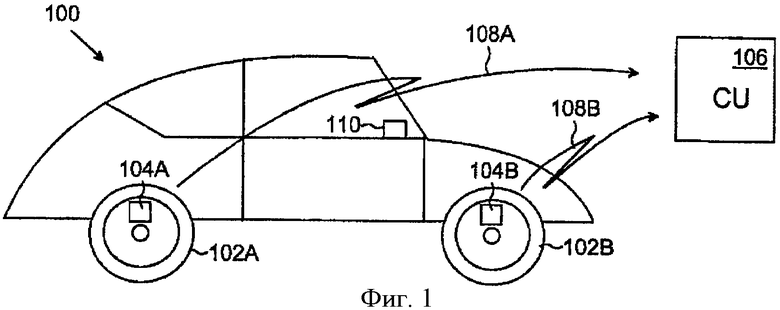
На фиг.1 контролирующая система для колес транспортного средства содержит беспроводные измерительные модули 104А, 104В, предназначенные для прикрепления к колесам 102А, 102В транспортного средства 100, причем беспроводные измерительные модули 104А, 104В выполнены с возможностью осуществления связи посредством беспроводных сигналов 108А, 108В связи. В варианте осуществления контролирующая система также содержит центральный процессор (ЦП) (CU) 106, который может осуществлять связь с беспроводными измерительными модулями 104А, 104В посредством беспроводного сигнала 108А, 108В связи.
Транспортное средство 100 может быть автомобилем, грузовиком, мотоциклом и (или) трейлером. Однако раскрытое решение не ограничено этими примерами, но транспортное средство может быть любым колесным транспортным средством, колеса 102А, 102В которого нужно контролировать.
Колесо 102А, 102В транспортного средства, как правило, содержит обод и шину. Шина, как правило, представляет собой наполненную газом резиновую конструкцию.
Центральный процессор 106 может быть установлен в транспортном средстве 100, и в этом случае беспроводной центральный процессор 106 может использовать такие структуры транспортного средства 100, как пользовательский интерфейс и источник питания.
В варианте осуществления контролирующая система содержит датчик 110 поступательного ускорения для измерения поступательного ускорения транспортного средства 100.
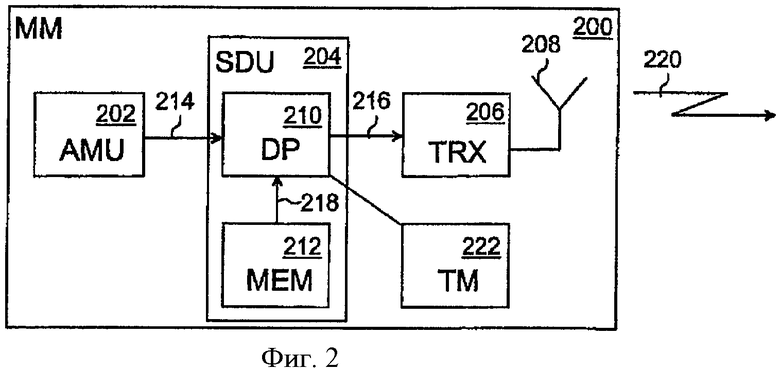
На фиг.2 беспроводной измерительный модуль 200 содержит, как правило, блок 206 связи (TRX) измерительного модуля с антеннами 208, блоком 204 определения состояния (SDU), подключенным к блоку 206 связи измерительного модуля, и блоком 202 измерения ускорения (AMU), подключенным к блоку 204 определения состояния.
Блок 202 измерения ускорения определяет информацию 214 ускорения, связанную с движением колеса 102А, 102В в одном или нескольких направлениях. Информация 214 ускорения подается в блок 204 определения состояния, который определяет значение параметра, характеризующего состояние или особенность колеса 102А, 102В транспортного средства с помощью информации 214 ускорения.
В одном варианте осуществления этот параметр характеризует число оборотов, на которое повернулось колесо 102А, 102В транспортного средства, или переменную, пропорциональную числу оборотов, такую как пройденное расстояние.
В одном варианте осуществления этот параметр характеризует радиус колеса 102А, 102В транспортного средства или переменную, пропорциональную этому радиусу, такую как диаметр колеса 102А, 102В или длина окружности. Радиус колеса 102А, 102В транспортного средства или параметр, пропорциональный радиусу, можно далее использовать для определения, например, давления воздуха в шине колеса 102А, 102В, величины беговой дорожки протектора и (или) нагрузки колеса 102А, 102В.
В одном варианте осуществления параметр характеризует предельное условие колеса 102А, 102В, такое как напряжение, которое превышает заранее заданный предел, что может быть вызвано, например, наездом колеса 102А, 102В на какой-то объект или неровность на поверхности дороги.
В одном варианте осуществления параметр характеризует боковое перемещение колеса 102А, 102В, которое может произойти из-за неисправного подшипника и (или) поломки крепления колеса 102А, 102В.
Параметр может быть найден с помощью заранее известных эталонных параметров колеса 102А, 102В, хранящихся в запоминающем блоке 212, и (или) эталонных параметров, найденных блоком 204 определения состояния, таких как эталонный радиус, эталонная температура, эталонное давление и (или) эталонная нагрузка колеса 102А, 102В.
Блок 204 определения состояния может быть воплощен, например, посредством компьютерной программы 218, исполняемой цифровым процессором 210 и хранящейся в запоминающем блоке 212 (MEM).
Цифровой процессор 210 может загружать компьютерную программу 218 из запоминающего блока 212, причем компьютерная программа 218 включает в себя закодированные команды для исполнения компьютерного процесса в цифровом процессоре 210. Компьютерный процесс может исполнять алгоритм для нахождения значения параметра, характеризующего состояние или особенность колеса 102А, 102В транспортного средства.
В качестве измеряющего ускорение элемента блок 202 измерения ускорения может содержать, например, датчик ускорения, который является пьезоэлектрическим или воплощен посредством иной известной технологии. Структура и функции датчиков ускорения сами по себе известны специалистам, вследствие чего они не будут обсуждаться здесь более подробно.
Цифровой процессор 210 подает значение 216 параметра, которое он определил, в блок 206 связи модуля, который передает значение 216 параметра посредством беспроводного сигнала 220 связи, например, в центральный процессор 106.
Беспроводный сигнал 220 связи может быть высокочастотным сигналом, и в этом случае блок 206 связи модуля содержит, как правило, радиопередатчик.
В одном варианте осуществления радиопередатчик основан на технологии Blue-Tooth.
В другом варианте осуществления радиопередатчик воплощает беспроводную местную сеть (WLAN, беспроводная сеть местного доступа) (WPAN, беспроводная персональная сеть), которая может быть основана, например, на протоколе IEEE 802.15.4. В одном варианте осуществления радиопередатчик воплощает интерфейс ZigBee.
В одном варианте осуществления беспроводной сигнал 220 связи основан на использовании магнитной составляющей электромагнитного поля. В этом случае антенна 208 может быть заменена катушкой индуктивности. Частота колебаний электромагнитного поля может быть сотни килогерц, например, но раскрытое решение не ограничено этим частотным диапазоном.
В одном варианте осуществления беспроводной измерительный модуль 200 содержит признаковую память 222 (ТМ) для хранения параметра, который определен блоком 204 определения состояния. Признаковая память 222 может быть воплощена, например, посредством запоминающего блока 212 или каким-либо другим элементом, способным хранить данные.
Признаковая память 222 может быть подключена, например, посредством цифрового процессора 210 к блоку 206 связи модуля, за счет чего данные, содержащиеся в признаковой памяти 222, могут пересылаться посредством беспроводного сигнала 220 связи, например, в центральный процессор 106.
Признаковая память 222 может также включать в себя эталонные значения параметра колеса, а также иную информацию о колесе 102А, 102В, такую как тип шины.
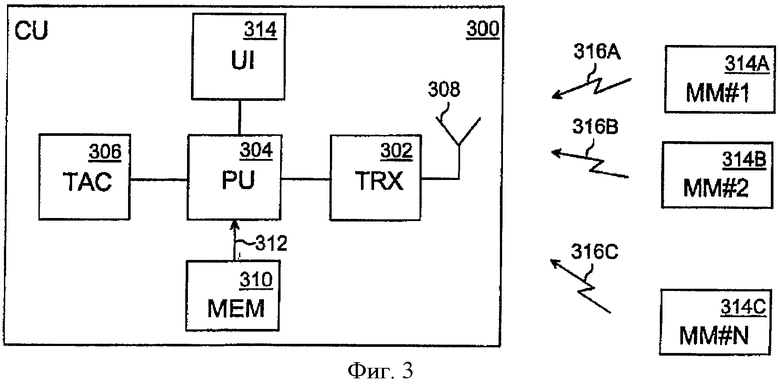
На фиг.3 центральный процессор 300 содержит антенну 308, блок 302 связи (TRX) центрального процессора, соединенный с антенной 308, процессор 304 (PU), соединенный с блоком 302 связи центрального процессора, запоминающий блок 310, соединенный с процессором 304, датчик 306 поступательного ускорения (ТАС), соединенный с процессором 304, и пользовательский интерфейс 314 (UI), соединенный с процессором 304.
Блок 302 связи центрального процессора может воплощать беспроводной интерфейс на основе BlueTooth, WLAN, WPAN, ZigBee или магнитного переноса данных, например.
Блок 302 связи центрального процессора осуществляет связь беспроводным сигналом 220 связи с беспроводным измерительным модулем 200 на фиг.2 путем приема сигнала 220 связи через антенну 308. Блок 302 связи центрального процессора подает параметр, включенный в беспроводной сигнал 220 связи, в процессор 304.
Процессор 304 обрабатывает параметр на основе закодированных команд 312, хранящихся в запоминающем блоке 310.
В одном варианте осуществления центральный процессор 300 представляет собой компьютер, в котором блок 302 связи центрального компьютера может быть, например, сетевой картой, которая воплощает соединение BlueTooth беспроводной локальной сети.
Компьютер может быть, например, портативным компьютером (лаптоп) или настольным компьютером (ПК) (PC). Компьютер может быть помещен в оборудование или станцию обслуживания колес, например, и в этом случае компьютер может считывать данные, включенные в признаковую память 222 колеса 102А, 102В, такие как пройденный километраж, число оборотов и (или) значение параметра, связанное с предельным условием.
В одном варианте осуществления центральный процессор 300 представляет собой мобильный телефон, устройства ПЦА (PDA) (персональный цифровой ассистент) или другое портативное электронное устройство, которое воплощает беспроводной интерфейс, необходимый для переноса сигнала 220 связи.
В одном варианте осуществления центральный процессор 300 представляет собой устройство обработки данных, установленное в транспортном средстве 100. Это устройство обработки данных может быть также соединено с шиной CAN (CAN, локальная сеть контроллеров) транспортного средства, за счет чего устройство обработки данных может осуществлять связь с системами транспортного средства.
На фиг.3 в одном варианте осуществления контролирующая система содержит множество беспроводных измерительных модулей 314А, 314В, 314С (ММ#1, ММ#2, … MM#N), которые могут иметь ту же самую структуру, что и беспроводной измерительный модуль 200 по фиг.2. Каждый беспроводной измерительный модуль 314А-314С выполнен с возможностью прикрепления к отдельному колесу 102А, 102В транспортного средства 100.
Каждый беспроводной измерительный модуль 314А-314С определяет информацию ускорения, характеризующую особенность или состояние колеса 102А, 102В, включает значение параметра в беспроводной сигнал 316А-316С связи и передает беспроводный сигнал 316А-316С связи в центральный процессор 300.
Каждый беспроводной сигнал 316А-316С связи может иметь специфичный для измерительного модуля идентификатор, который может быть воплощен посредством частотного или временного кадра беспроводного сигнала 316А-316С связи или посредством кода, включенного в беспроводной сигнал 316А-316С связи.
Блок 302 связи центрального процессора принимает беспроводные сигналы 316А-316С связи и подает параметры, включенные в беспроводные сигналы 316А-316С связи, в процессор 304. Процессор 304 может сравнивать параметры, принятые из различных беспроводных измерительных модулей 314А-314С, и исполнять заранее заданную функцию, если это сравнение удовлетворяет заранее заданным условиям.
В одном варианте осуществления параметр каждого сигнала 316А-316С связи характеризует частоту вращения колеса 102А, 102В, радиус или переменную, пропорциональную радиусу, такую как диаметр или длину окружности колеса 102А, 102В. Процессор 304 может сравнивать значения параметра различных колес 102А, 102В и, в случае обнаружения заранее заданного отклонения между параметрами, указывать это отклонение пользователю посредством, например, пользовательского интерфейса 314 центрального процессора 300. Отклонение в частоте вращения колеса 102А, 102В от частот вращения других колес может быть индикацией того, что давление воздуха упало или что беговая дорожка протектора стала меньше в интересующем колесе 102А, 102В.
В одном варианте осуществления контролирующая система встроена в противоугонную систему для колес транспортного средства, которая использует информацию ускорения, измеренную от колес 102А, 102В транспортного средства. В этом случае беспроводной измерительный модуль 104А, 104В определяет, например, информацию кинетического состояния, характеризующую кинетическое состояние колеса 102А, 102В на основе измерения ускорения, генерирует беспроводной сигнал 108А, 108В связи на основе информации кинетического состояния и передает беспроводной сигнал 108А, 108В связи в центральный процессор 106. Центральный процессор 106 принимает беспроводной сигнал 108А, 108В связи и может исполнять заранее заданную функцию сигнализации, если беспроводной сигнал 108А, 108В связи удовлетворяет заранее заданным условиям.
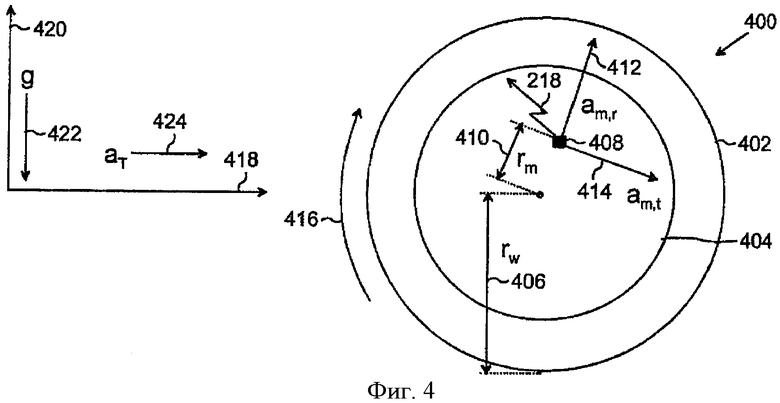
На фиг.4 проверим характеристики вращения колеса 400, вращающегося на основании. Колесо содержит шинную часть 402 и ободную часть 404.
В примере по фиг.4 беспроводной измерительный модуль 408 помещен на расстоянии измерительного радиуса 410 от центральной точки колеса 400. Радиус же колеса 400 обозначен ссылочной позицией 406. Измерительный радиус 410 сказывается на диапазоне измерений, требуемом беспроводным измерительным модулем 408. При выборе измерительного радиуса 410 разумно учесть максимальную скорость вращения колеса 400 и динамический рабочий диапазон и допустимую погрешность блока 202 измерения ускорения. Измерительный радиус 410 может, например, изменяться между 5 мм и 10 см.
Беспроводной измерительный блок 408, как правило, прикреплен к ободу колеса, например, посредством капсюля, встроенного в центральном отверстии обода.
Фиг.4 также иллюстрирует систему координат, предусмотренную на колесе 400, включающую в себя радиальную ось 412, тангенциальную ось 414 и боковую ось, направление которой перпендикулярно радиальной оси 412 и тангенциальной оси 414. Помимо этого, фиг.4 показывает систему координат, фиксированную в пространстве, включающую в себя вертикальную ось 420 и горизонтальную ось 418.
В одном варианте осуществления блок 202 измерения ускорения беспроводного измерительного модуля 408 измеряет радиальное ускорение. В этом случае информация 214 ускорения включает в себя радиальное ускорение.
В одном варианте осуществления блок 202 измерения ускорения беспроводного измерительного модуля 408 измеряет тангенциальное ускорение. В этом случае информация 214 ускорения включает в себя тангенциальное ускорение.
В другом варианте осуществления блок 202 измерения ускорения беспроводного измерительного модуля 408 измеряет боковое ускорение. В этом случае информация 214 ускорения включает в себя боковое ускорение.
При вращении с постоянной скоростью в направлении стрелки 416 беспроводной измерительный блок 408 подвергается центробежному ускорению в направлении радиальной оси 412 и гравитационному ускорению 422 в направлении вертикальной оси 420, и в этом случае беспроводной измерительный модуль 408 подвергается радиальному ускорению

где аm,r представляет собой радиальное ускорение, измеренное беспроводным измерительным модулем 408, f есть скорость вращения колеса 400, g=9,81 мс-2 есть ускорение силы тяжести, rm есть измерительный радиус 410, а γ есть фазовый коэффициент.
Соответственно, тангенциальное ускорение можно проиллюстрировать выражением

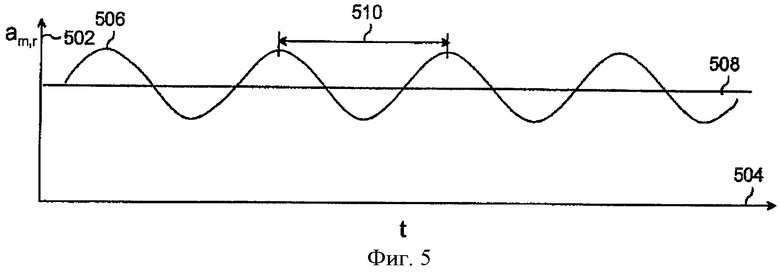
Фиг.5 иллюстрирует радиальное ускорение 502, измеренное беспроводным измерительным модулем 408, как функцию времени 504. Кривая 506 представляет мгновенное радиальное ускорение, а кривая 508 - среднее значение радиального ускорения. Аналогичная кривая может быть получена для тангенциального ускорения.
Среднее значение 508 радиального ускорения можно использовать для определения первого выражения в правой части уравнения (1), на основе чего можно определить частоту f вращения, если известен измерительный радиус rm.
Частоту вращения можно также определить путем измерения периода повторения кривой 506 и вычисления среднего значения периода 510 повторения.
Частоту вращения можно также определить измерением периода повторения тангенциального ускорения.
В одном варианте осуществления блок 204 определения состояния может регистрировать общее число N вращений колеса 400 суммированием максимумов ускорения в кривой 506, например. В этом случае расстояние S, которое пройдено колесом 400, может быть подсчитано на основе уравнения

где rw есть радиус 406 колеса 400. Радиус 406 колеса может храниться в признаковой памяти 222, например.
В одном варианте осуществления блок 408 измерения ускорения определяет вращательную составляющую ускорения, связанную с вращением колеса 400, такую как радиальное ускорение am,r или тангенциальное ускорение аm,t. Блок 408 измерения ускорения подает значение вращательной составляющей ускорения в блок 206 связи модуля, который включает значение вращательной составляющей ускорения в беспроводной сигнал 220 связи.
Центральный процессор 300 принимает беспроводной сигнал 220 связи и подает значение вращательной составляющей ускорения в процессор 304.
Датчик 306 поступательного ускорения центрального процессора 300 может определять поступательную составляющую аT 424 ускорения, связанную с поступательным перемещением колеса 102А, 102В транспортного средства, и подавать поступательную составляющую аT 424 ускорения в процессор 304.
Процессор 304 может определять значение параметра, характеризующего состояние или особенность колеса 102А, 102В транспортного средства, через вращательную составляющую ускорения и поступательную составляющую ускорения.
Радиус 406 колеса 400 можно найти, например, на основе выражения
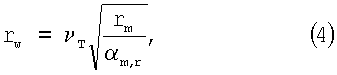
где νT есть скорость движения транспортного средства 100, которую можно вычислить, например, как интеграл по времени от поступательного ускорения.
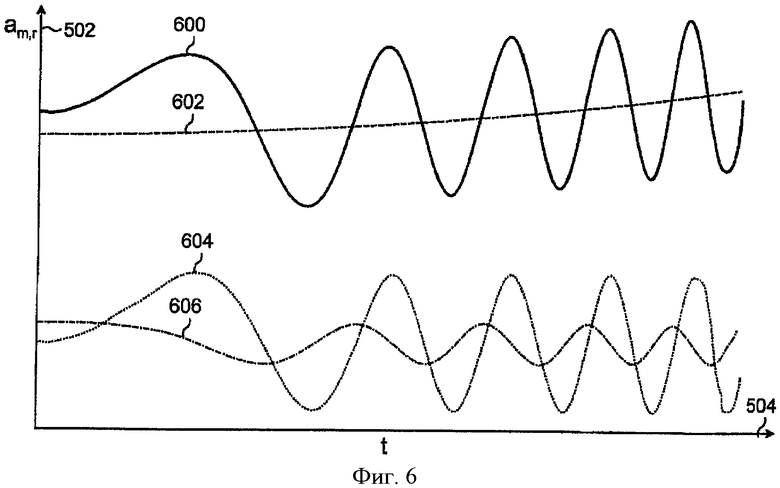
На фиг.6 рассмотрим радиальное ускорение колеса 400 транспортного средства при ускоренном движении, измеренное беспроводным измерительным модулем 408. Так, радиальное ускорение можно представить выражением

где α(t) есть угол вращения колеса 400 как функция времени t.
Соответственно, тангенциальное ускорение можно представить выражением

Первый член правой стороны уравнения (5) помечен пунктирной линией 602 и он представляет центробежное ускорение в направлении радиальной оси 412, которое увеличивается согласно поступательному ускорению aT.
Второй член правой стороны уравнения (5) помечен штрих-пунктирной линией 606 и он показывает непосредственное влияние поступательного ускорения аT на радиальное ускорение.
Третий член правой стороны уравнения (5) помечен точечной линией 604 и он представляет влияние гравитации g на радиальное ускорение.
Непрерывная линия 600 представляет радиальное ускорение аm,r беспроводного измерительного модуля 400.
В одном варианте осуществления блок 204 определения состояния находит поступательную составляющую ускорения на основе радиального ускорения путем адаптации кривой 600 к модели согласно уравнению (5), например. В одном варианте осуществления блок 204 определения состояния математически исключает ускорение силы тяжести из кривой 600, за счет чего влияние поступательного ускорения остается периодическим фактором. Поступательное ускорение можно найти на основе амплитуды кривой 600 после того, как исключено влияние тяготения. Таким образом, радиус 406 колеса 400 можно найти, например, посредством уравнения (4), когда скорость νT перемещения вычислена, например, как интеграл по времени от аT. Тангенциальное ускорение можно проверить аналогичным образом.
Хотя изобретение было описано со ссылкой на пример согласно сопровождающим чертежам, ясно, что изобретение не ограничено им, но может быть модифицировано различными путями в объеме приложенной формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ | 2006 |
|
RU2399521C2 |
| СПОСОБ И УСТРОЙСТВО БЕСПРОВОДНОЙ ДИСТАНЦИОННОЙ ТЕЛЕМЕТРИИ С ИСПОЛЬЗОВАНИЕМ ad-hoc СЕТЕЙ | 2003 |
|
RU2310293C2 |
| НАВИГАЦИЯ, ОСНОВАННАЯ НА БДИТЕЛЬНОСТИ ВОДИТЕЛЯ ИЛИ ПАССАЖИРА | 2017 |
|
RU2682956C2 |
| ВЫЧИСЛЕНИЕ ДАННЫХ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ С ИСПОЛЬЗОВАНИЕМ ГРАДИЕНТА ДАННЫХ ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 2014 |
|
RU2733976C2 |
| УПРАВЛЕНИЕ ВНЕШНИМИ ОСВЕТИТЕЛЬНЫМИ ПРИБОРАМИ ПОЛИЦЕЙСКОГО ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2682691C2 |
| СБОР ДАННЫХ О ВЫБРОСАХ С МЕТКОЙ ВРЕМЕНИ ДЛЯ УСТРОЙСТВ УПРАВЛЕНИЯ ПРОЦЕССОМ | 2013 |
|
RU2637049C2 |
| СИСТЕМА МОНИТОРИНГА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2022 |
|
RU2800560C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ ПРЕДОТВРАЩЕНИЯ КРАЖИ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2693591C2 |
| ВЫЧИСЛЕНИЕ ДАННЫХ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ С ИСПОЛЬЗОВАНИЕМ ГРАДИЕНТА ДАННЫХ ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 2014 |
|
RU2605392C1 |
| ФИЛЬТРАЦИЯ АКУСТИЧЕСКОГО ЗАГРЯЗНЕНИЯ ОТ ДАТЧИКОВ БЕЗОПАСНОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2681996C2 |
Группа изобретений относится к контрольно-измерительному оборудованию автомобилей. Контролирующая система, предназначенная для контроля колес транспортного средства, содержит множество беспроводных измерительных модулей, выполненных с возможностью прикрепления к колесу транспортного средства. Каждый беспроводной измерительный модуль включает в себя блок измерения ускорения для определения информации ускорения, связанной с движением колеса транспортного средства, блок определения состояния, предназначенный для нахождения значения по меньшей мере одного параметра, характеризующего особенность или состояние колеса транспортного средства с помощью информации ускорения, блок связи модуля, предназначенный для передачи значения упомянутого по меньшей мере одного параметра посредством сигнала беспроводной связи, и центральный процессор. Последний содержит блок связи, выполненный с возможностью осуществлять связь сигналами беспроводной связи с множеством измерительных модулей, и процессор, выполненный с возможностью выполнять сравнение параметров, принятых от различных беспроводных измерительных модулей, и с возможностью исполнять заранее заданную функцию, если сравнение удовлетворяет заранее заданным условиям. Группа изобретений обеспечивает осуществление автоматического контроля колес с повышенной эффективностью, причем во время езды транспортного средства. 2 н. и 6 з.п. ф-лы, 6 ил.
1. Контролирующая система, предназначенная для контроля колес транспортного средства, содержащая:
множество беспроводных измерительных модулей (104А, 104В, 200, 408), выполненных с возможностью прикрепления к колесу транспортного средства, при этом каждый беспроводной измерительный модуль содержит:
блок (202) измерения ускорения для определения информации ускорения, связанной с движением колеса транспортного средства;
блок (204) определения состояния, предназначенный для нахождения значения по меньшей мере одного параметра, характеризующего кинетическую особенность или кинетическое состояние колеса транспортного средства с помощью информации ускорения;
блок (206) связи модуля, предназначенный для передачи значения упомянутого по меньшей мере одного параметра посредством сигнала беспроводной связи, и
центральный процессор (106, 300), содержащий блок (106, 302) связи центрального процессора, выполненный с возможностью осуществлять связь сигналами беспроводной связи с множеством измерительных модулей (104А, 104В, 200, 408), отличающаяся тем, что
центральный процессор дополнительно содержит процессор (304), выполненный с возможностью выполнять сравнение параметров, принятых от различных беспроводных измерительных модулей (314А, 314В, 314С), и с возможностью исполнять заранее заданную функцию, если сравнение удовлетворяет заранее заданным условиям.
2. Контролирующая система по п.1, отличающаяся тем, что
блок (202) измерения ускорения выполнен с возможностью измерения радиального ускорения, и
блок (204) определения состояния выполнен с возможностью нахождения значения упомянутого по меньшей мере одного параметра по радиальному ускорению.
3. Контролирующая система по п.1, отличающаяся тем, что
блок (202) измерения ускорения выполнен с возможностью измерения тангенциального ускорения, и
блок (204) определения состояния выполнен с возможностью нахождения значения упомянутого по меньшей мере одного параметра по тангенциальному ускорению.
4. Контролирующая система по п.1, отличающаяся тем, что беспроводной измерительный модуль (200) содержит также считываемую беспроводным образом признаковую память (222) для хранения значения упомянутого по меньшей мере одного параметра.
5. Контролирующая система по п.1, отличающаяся тем, что
блок (202, 408) измерения ускорения выполнен с возможностью включать вращательную составляющую ускорения в сигнал беспроводной связи,
центральный процессор (106, 300) дополнительно содержит датчик (110, 306) поступательного ускорения для нахождения поступательной составляющей ускорения, связанной с поступательным движением колеса транспортного средства, и
процессор (304) выполнен с возможностью нахождения значения упомянутого по меньшей мере одного параметра посредством вращательной составляющей ускорения и поступательной составляющей ускорения.
6. Контролирующая система по п.1, отличающаяся тем, что контролирующая система встроена в противоугонную систему для колес транспортного средства, которая использует информацию ускорения, измеренную от колес транспортного средства.
7. Контролирующая система по п.1, отличающаяся тем, что блок (202) измерения ускорения выполнен с возможностью измерения бокового ускорения колеса транспортного средства.
8. Центральный процессор (106, 300) контролирующей системы для контроля колес транспортного средства, содержащий:
блок (106, 302) связи, выполненный с возможностью осуществления связи сигналами беспроводной связи с множеством измерительных модулей (104А, 104В, 200, 408), присоединенных к различным колесам транспортного средства, и с возможностью получения значений по меньшей мере одного параметра, характеризующего кинетическую особенность или кинетическое состояние различных колес транспортного средства от множества беспроводных измерительных модулей,
отличающийся тем, что
центральный процессор дополнительно содержит процессор (304), выполненный с возможностью выполнять сравнение параметров, принятых от различных беспроводных измерительных модулей (314А, 314В, 314С), и с возможностью исполнять заранее заданную функцию, если сравнение удовлетворяет заранее заданным условиям.
| ПЛАСТИНЧАТЫЙ ТЕПЛООБМЕННИК | 0 |
|
SU220287A1 |
| ВОДОРАСТВОРИМЫЕ КОМПЛЕКСЫ КАТИОННЫХ ПОЛИЭЛЕКТРОЛИТОВ И АНИОННЫХ ПОВЕРХНОСТНО-АКТИВНЫХ ВЕЩЕСТВ, ОБЛАДАЮЩИЕ МАССО- И РОСТСТИМУЛИРУЮЩЕЙ АКТИВНОСТЬЮ В ОТНОШЕНИИ ЖИВОТНЫХ | 1983 |
|
SU1172237A1 |
| US 2003020604 A1, 30.01.2003 | |||
| Устройство для формования лобовых частей обмоток статоров электрических машин | 1987 |
|
SU1524133A1 |
| Устройство для контролирования состояния колеса транспортного средства | 1979 |
|
SU965346A3 |

