Область техники, к которой относится изобретение
Настоящее изобретение относится к области создания транспортных средств на воздушной подушке и может быть использовано, в частности, при конструировании или совершенствовании судов на воздушной подушке, в особенности маломерных судов на воздушной подушке.
Уровень техники
В настоящее время известны различные способы и средства для управления судами на воздушной подушке.
Например, в авторском свидетельстве СССР №1178036 (опубл. 07.04.1988), в патенте Великобритании №1184096 (опубл. 11.03.1970) и в публикации заявки РСТ № WO 02/20297 (опубл. 14.03.2002) описаны способы управления судном на воздушной подушке, осуществляемые с помощью рулевой колонки (поворот) и педалей (тяга).
В авторском свидетельстве СССР №1169287 (опубл. 07.04.1988) и в патентах США №№3870121 (опубл. 11.03.1975), 5005660 (опубл. 09.04.1991) и 5273128 (опубл. 28.12.1993) раскрыты средства управления судном на воздушной подушке в виде одной рулевой колонки, отклонение которой влево или вправо приводит к повороту судна в ту же сторону, а отклонение вперед или назад приводит к увеличению или уменьшению тяги двигателя.
Патент США №3605937 (опубл. 20.09.1971) описывает систему управления судном на воздушной подушке, в которой вращение рулевой колонки вызывает поворот судна, а отклонение в любую сторону приводит к перемещению судна в ту же сторону.
Все эти известные средства достаточно сложны, в особенности при их использовании на маломерных судах на воздушной подушке. На таких судах органы управления, как правило, представляют собой две рукоятки, которыми можно порознь управлять рулями поворота. Поэтому известные средства, в которых эти рукоятки заменены штурвалом или рулевой колонкой, не всегда пригодны для удобного и быстрого управления движением, когда на первый план выступает маневренность. С другой стороны, тягу такого судна нужно регулировать, не выпуская из рук обеих рукояток, и весьма желательно при этом, чтобы органов управления было как можно меньше.
Сущность изобретения
Таким образом, существует необходимость в разработке простого и удобного средства управления судном на воздушной подушке, в особенности маломерного судна, преодолевающего указанные выше недостатки и обеспечивающего упрощение управления таким судном.
Для решения поставленной задачи и достижения указанного технического результата в одном объекте настоящего изобретения предложен способ обеспечения управления судном на воздушной подушке, имеющим воздушный канал тяги и пилотское место. В этом способе устанавливают на выходе воздушного канала тяги по меньшей мере одну группу из двух поворотных рулей с осями вращения этих поворотных рулей в плоскости, практически перпендикулярной оси воздушного канала тяги; устанавливают на пилотском месте две рукоятки на заранее заданном расстоянии друг от друга и примерно на одном уровне от пола пилотского места с возможностью независимого перемещения каждой рукоятки вокруг соответствующей оси вращения; обеспечивают соединение каждой рукоятки с по меньшей мере одним из поворотных рулей по меньшей мере одной группы так, что перемещение этой рукоятки приводит к повороту соответствующего руля в каждой группе; связывают обе рукоятки с помощью элемента связи с шарнирными соединениями на концах для получения кинематической цепи, обеспечивающей совместное перемещение обеих рукояток, что вызывает поворот обоих рулей в каждой группе в одну и ту же сторону; при этом выполняют элемент связи с возможностью изменения расстояния между обеими рукоятками при приложении к ним по меньшей мере заранее заданного усилия во встречном направлении, что вызывает поворот обоих рулей в группе в разные стороны.
Особенность данного способа состоит в том, что оси вращения поворотных рулей в каждой группе могут располагать на выходе воздушного канала тяги либо практически параллельно друг другу в направлении, близком к вертикальному, либо наклонно к вертикальному направлению, так что точка пересечения осей вращения поворотных рулей каждой группы находится в верхней части воздушного канала тяги.
Другая особенность данного способа состоит в том, что оси вращения рукояток могут располагаться параллельно друг другу.
Еще одна особенность данного способа состоит в том, что соединение каждой рукоятки с одним из поворотных рулей в группе могут осуществлять тросом в упругой оболочке, способным передавать как тянущее усилие, так и толкающее усилие.
Еще одна особенность данного способа состоит в том, что элемент связи могут выполнять однозвенным либо двухзвенным. Однозвенный элемент связи может быть эластомерной вставкой, газовой пружиной, телескопической пружиной, цилиндрической пружиной. Двухзвенный элемент связи может быть эластомерной вставкой между звеньями; цилиндрической пружиной между звеньями; витой пружиной, огибающей шарнирное соединение; объемной пружиной, охватывающей шарнирное соединение.
Для решения той же задачи и достижения того же технического результата в другом объекте настоящего изобретения предложена система управления судном на воздушной подушке, имеющим воздушный канал тяги и пилотское место, содержащая по меньшей мере одну группу из двух поворотных рулей с осями вращения, установленных на выходе воздушного канала тяги в плоскости, перпендикулярной оси воздушного канала тяги; две рукоятки, установленные на пилотском месте с возможностью независимого перемещения каждой рукоятки вокруг соответствующей оси вращения; по меньшей мере две тяги, предназначенные каждая для соединения каждой рукоятки с по меньшей мере одним из поворотных рулей по меньшей мере одной группы так, чтобы перемещение этой рукоятки приводило к повороту соответствующего руля в группе; элемент связи с шарнирными соединениями на концах, соединяющий обе рукоятки для получения кинематической цепи, обеспечивающей совместное перемещение обеих рукояток для поворота обоих рулей в группе в одну и ту же сторону; при этом элемент связи выполнен с возможностью изменения расстояния между обеими рукоятками при приложении к ним по меньшей мере заранее заданного усилия во встречном направлении для поворота обоих рулей в группе в разные стороны.
Особенность данной системы состоит в том, что оси вращения поворотных рулей в каждой группе могут быть расположены на выходе воздушного канала тяги либо практически параллельно друг другу в направлении, близком к вертикальному, либо наклонно к вертикальному направлению, так что точка пересечения осей вращения поворотных рулей каждой группы находится в верхней части воздушного канала тяги.
Другая особенность данной системы состоит в том, что оси вращения рукояток могут быть расположены параллельно друг другу.
Еще одна особенность данной системы состоит в том, что каждая тяга может быть выполнена в виде троса в упругой оболочке, способного передавать как тянущее усилие, так и толкающее усилие.
Еще одна особенность данной системы состоит в том, что элемент связи может быть выполнен однозвенным или двухзвенным. Однозвенный элемент связи может быть эластомерной вставкой, газовой пружиной, телескопической пружиной, цилиндрической пружиной. Двухзвенный элемент связи может быть эластомерной вставкой между звеньями; цилиндрической пружиной между звеньями; витой пружиной, огибающей шарнирное соединение; объемной пружиной, охватывающей шарнирное соединение.
Краткое описание чертежей
Изобретение иллюстрируется чертежами, на которых одинаковые ссылочные позиции обозначают одинаковые элементы.
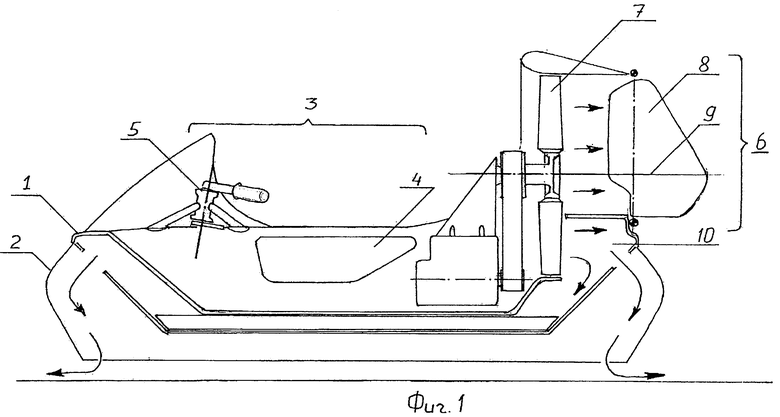
На фиг.1 показан вид сбоку в разрезе судна на воздушной подушке с системой управления по настоящему изобретению.
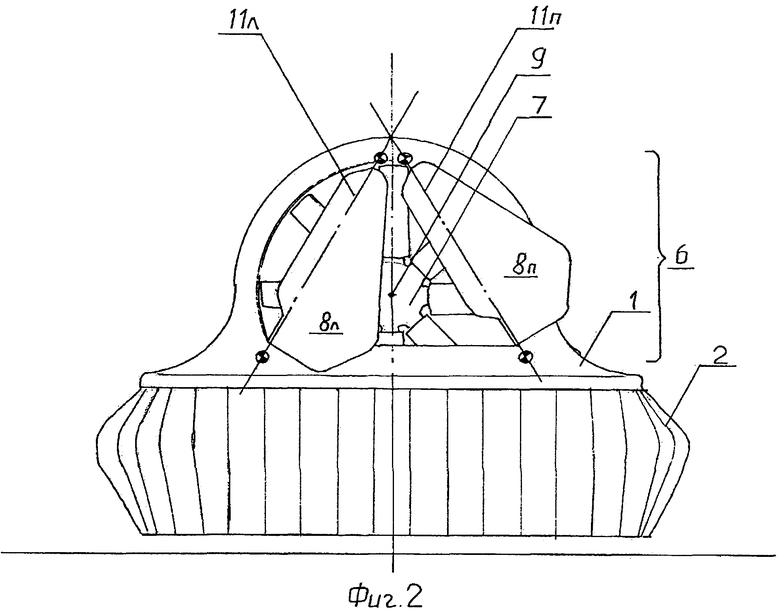
На фиг.2 показан вид сзади судна по фиг.1.
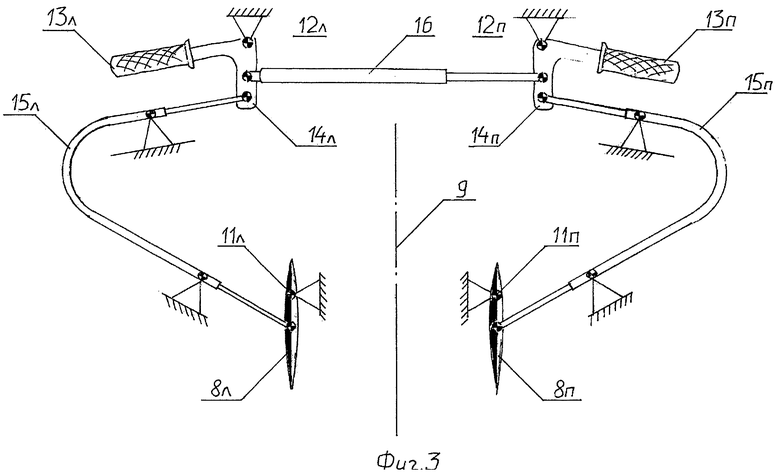
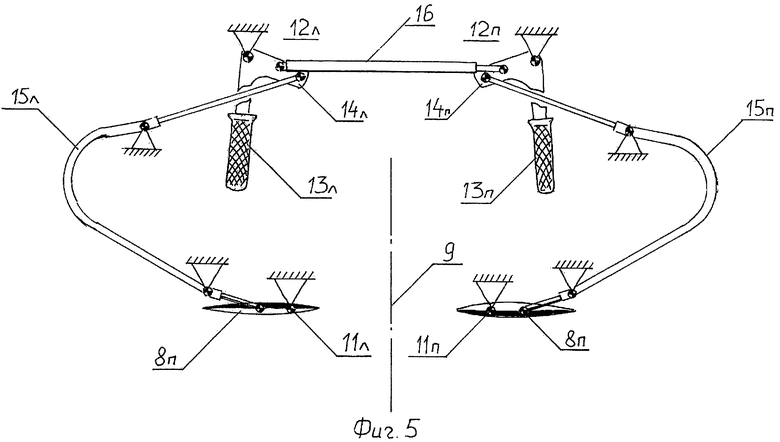
На фиг.3-5 приведены условные схемы системы управления судна по фиг.1 и 2 для разных ситуаций.
Подробное описание вариантов осуществления изобретения
Заявленный способ обеспечения управления судном на воздушной подушке будет далее проиллюстрирован на примере системы управления судном на воздушной подушке, представленной на прилагаемых чертежах. Следует иметь в виду, что показанный на этих чертежах вариант осуществления настоящего изобретения не является ограничивающим, он служит лишь для демонстрации основных принципов данного изобретения, объем которого определяется приложенной формулой изобретения.
На фиг.1 показано судно на воздушной подушке, в котором используется система управления по настоящему изобретению. Корпус 1 этого судна показан на фиг.1 в разрезе по осевой линии судна. В нижней части корпуса 1 имеется ограждение 2, внутри которого получается камера для создания избыточного давления, обеспечивающего «воздушную подушку». Это ограждение 2 лучше видно на фиг.2.
Ссылочной позицией 3 на фиг.1 отмечено пилотское место, которое включает в себя по меньшей мере сидение 4 и средство 5 управления. Ссылочной позицией 6 на фиг.1 и фиг.2 отмечен воздушный канал тяги. Тяга, условно показанная стрелками, направленными на фиг.1 вправо, создается вентилятором 7, который имеет, например, ременный привод от двигателя. На выходе воздушного канала 6 тяги установлены два поворотных руля 8. На фиг.2 каждый из поворотных рулей 8 помечен ссылочной позицией 8л для левого руля и 8п для правого руля. Следует иметь в виду, что на выходе воздушного канала 6 тяги может быть установлена не одна группа поворотных рулей 8, как для простоты показано на фиг.1 и фиг.2, а несколько (две или более) групп по два поворотных руля. Большее количество групп поворотных рулей обеспечит лучшую маневренность и более эффективное управление. Ссылочная позиция 9 на фиг.1 и фиг.2 обозначает продольную ось воздушного канала 6 тяги.
На маломерных судах на воздушной подушке, как правило, один и тот же вентилятор 7 служит и для создания тяги, и для формирования воздушной подушки. На фиг.1 ссылочная позиция 10 отмечает канал наддува воздушной подушки. Однако в принципе для формирования воздушной подушки внутри ограждения 2 возможно применение отдельного вентилятора. Данное обстоятельство никак не влияет на объем правовой охраны по настоящему изобретению.
На фиг.2 поворотные рули 8 (8л и 8п) показаны установленными на выходе воздушного канала 6 тяги наклонно к вертикальному направлению, так что точка пересечения осей 11 вращения поворотных рулей 8 этой группы находится в верхней части воздушного канала 6 тяги. Как и для поворотных рулей 8, буквы «л» и «п» отмечают оси 11 вращения соответственно для левого и правого поворотного руля. Следует, однако, иметь в виду, что наклонное положение осей 11 вращения не является обязательным. Вполне возможно установить оси 11л и 11п вращения поворотных рулей 8л и 8п вертикально. В другом варианте осуществления оси 11 вращения поворотных рулей 8 могут быть наклонными к вертикальному направлению, но точка их пересечения может располагаться выше или ниже верхнего края воздушного канала 6 тяги. Возможна также ситуация, когда оси вращения поворотных рулей одной группы будут вертикальны, а оси вращения поворотных рулей другой группы будут иметь точку пересечения в верхней части воздушного канала 6 тяги, либо выше или ниже верхнего края воздушного канала 6 тяги.
Форма поворотных рулей 8, показанная на фиг.2, также является не обязательной. Более того, у поворотных рулей разных групп форма может отличаться. Конкретная форма поворотных рулей 8 в каждой группе определяется тем, какой режим изменения тяги требуется обеспечить и какие для этого требуются финансовые и трудовые затраты. Под изменением тяги в данном случае понимается как изменение величины тяги, так и изменение направления тяги. В частности, можно указать, например, эффект зависания, возможность создавать дифферент на корму, компенсация опрокидывающего момента при рулении, минимальный радиус разворота при заданной скорости. К примеру, для обеспечения эффекта зависания необходимо полностью перекрывать воздушный канал 6 тяги поворотными рулями 8. Если же все полностью повернутые поворотные рули 8 имеют такую форму, что закрывают не весь воздушный канал 6 тяги, судно на воздушной подушке, показанное на фиг.1 и фиг.2, будет медленно двигаться на максимальной высоте воздушной подушки.
Далее будет подробно описано средство 5 управления судном на воздушной подушке по фиг.1 и фиг.2. На фиг.1-5 все оси вращения условно показаны кружочками с чередующимися двумя черными и двумя белыми секторами. При этом на фиг.3-5 оси вращения, закрепленные на корпусе 1, условно показаны опирающимися на треугольники, от оснований которых отходит косая штриховка. На всех фиг.3-5 показана продольная ось 9 воздушного канала 6 тяги.
На фиг.3 ссылочные позиции 12л и 12п обозначают соответственно левую и правую рулевые колонки. Каждая рулевая колонка 12 содержит рукоятку 13, установленную с возможностью независимого перемещения вокруг оси вращения. Оси вращения рукояток 12л и 12п на фиг.3-5 считаются параллельными, однако это не является обязательным требованием. Важно лишь, чтобы эти оси вращения были размещены примерно на одном уровне от пола пилотского места 3. Иными словами, эти оси вращения могут быть наклонены к вертикальному направлению и даже в пределе могут быть продолжением друг друга (что, однако, было бы весьма неудобно для пользователя). Каждая из рукояток 13 имеет загнутое плечо 14, так что в нейтральном положении оба загнутых плеча 14 от точки крепления рукоятки 13 на соответствующей оси вращения до конца загнутого плеча 14 примерно параллельны друг другу.
Конец загнутого плеча 14 каждой рукоятки 13 соединен тягой 15 с соответствующим поворотным рулем 8. Крепление концов тяги 15 к рукоятке 13 и поворотному рулю 8 осуществляется с помощью шарнирных соединений. В варианте осуществления, показанном на фиг.3-5, каждая тяга выполнена в виде троса в упругой оболочке, способного передавать как тянущее усилие, так и толкающее усилие. Эти тросы известны в технике (так называемые боуденовские тросы). Однако такое выполнение тяги не является обязательным, можно использовать любую подходящую конструкцию, которая способна передавать как тянущее, так и толкающее усилие. Как видно на фиг.3-5, каждая тяга 15 крепится к своему поворотному рулю 8 примерно посередине, тогда как ось 11 вращения этого поворотного руля 8 смещена к краю поворотного руля 8 (см. фиг.2). Это, однако, не является обязательным, и взаимное расположение точки крепления тяги 15 к поворотному рулю 8 и оси 11 вращения этого руля может любым при условии обеспечения поворота этого поворотного руля 8 так, как описано ниже.
Как видно из фиг.3-5, обе рукоятки 13 связаны друг с другом с помощью элемента 16 связи с шарнирными соединениями на концах. Крепление концов элемента 16 связи на фиг.3-5 показано примерно в середине загнутого плеча 14 каждой рукоятки 13, что, однако, не является обязательным. Важно лишь, чтобы это крепление обеспечивало получение кинематической цепи, позволяющей совместно перемещать обе рукоятки 13 при приложении к любой из них некоторого усилия, не превышающего заранее заданное значение. Т.е. поворот, скажем, левой рукоятки 12л по часовой стрелке или против часовой стрелки (по фиг.3-5) должен приводить к такому же повороту правой рукоятки 13п и наоборот. В то же время, элемент 16 связи выполнен с возможностью изменения расстояния между обеими рукоятками 13 при приложении к ним по меньшей мере заранее заданного усилия во встречном направлении. Т.е. если к левой рукоятке 13л приложено достаточное усилие для ее поворота против часовой стрелки (по фиг.3-5), а к правой рукоятке 13п приложено примерно такое же усилие для ее поворота по часовой стрелке (по фиг.3-5), элемент 16 связи изменяет свой размер (укорачивается), так что расстояние между концами загнутых плеч 14 обеих рукояток 13л и 13п уменьшается. Как отмечено выше, крепление элемента 16 связи к рукояткам 13 может быть осуществлено и иначе, нежели показано на фиг.3-5, поэтому в общем случае можно говорить об изменении расстояния между рукоятками 13л и 13п.
Элемент 16 связи может иметь самое разное выполнение. К примеру, элемент 16 связи может быть выполнен однозвенным, и тогда в качестве элемента 16 связи может быть применена, например, эластомерная вставка из упругого материала, такого как резина. Либо элемент 16 связи может быть выполнен в виде газовой пружины; либо это может быть телескопическая или цилиндрическая пружина. В другом варианте осуществления элемент 16 связи может быть выполнен двухзвенным с упругим шарнирным соединением звеньев. Такое соединение может быть обеспечено, например, эластомерной вставкой из упругого материала (к примеру, резины), установленной между звеньями. В качестве эластомерной вставки между звеньями можно использовать обычную цилиндрическую пружину. Упругое соединение между двумя звеньями может быть обеспечено витой пружиной, огибающей шарнирное соединение между звеньями двух звенного элемента 16 связи. При этом концы такой витой пружины параллельны соответствующим звеньям и закреплены на них. Упругое соединение между двумя звеньями можно обеспечить и с помощью объемной пружины, которая охватывает шарнирное соединение между двумя звеньями и действует как витая пружина.
Показанная на фиг.3-5 система управления работает следующим образом.
При работе двигателя вентилятор 7 создает воздушный поток, часть которого поступает в канал 10 наддува для создания воздушной подушки, а другая часть поступает в воздушный канал 6 тяги.
В нейтральном положении рукояток 13л и 13п, т.е. в отсутствие усилий, приложенных к рукояткам 13, поворотные рули 8л и 8п ориентированы примерно параллельно продольной оси 9 воздушного канала 6 тяги. Создаваемый вентилятором 7 воздушный поток при этом не отклоняется и не экранируется, и судно движется вперед (фиг.3).
В случае, когда пилот, сидящий на пилотском месте 3, одновременно поворачивает обе рукоятки 13л и 13п в одну и ту же сторону (например, по часовой стрелке, как показано на фиг.4), прикладывая при этом усилие, не превышающее заранее заданного значения, тяга 15л толкает поворотный руль 8л, поворачивая его против часовой стрелки (по фиг.4), а тяга 15п тянет поворотный руль 8п, поворачивая его также против часовой стрелки (по фиг.4). В результате оба поворотных руля 8л и 8п поворачиваются так, как показано на фиг.2, отклоняя часть воздушного потока тяги вправо (по фиг.4), что приводит к повороту судна на воздушной подушке вправо (по фиг.2). Понятно, что при примерно таком же повороте обеих рукояток 13 в другую сторону (т.е. против часовой стрелки по фиг.4) судно повернет влево (по фиг.2).
Если же пилот, сидящий на пилотском месте 3, одновременно приложит к обеим рукояткам 13л и 13п усилие, по меньшей мере равное заранее заданному, или превышающее его, однозвенный элемент 16 связи, показанный на фиг.5, уменьшит свою длину, а обе рукоятки 13л и 13п повернутся навстречу друг другу (как показано на фиг.5). В этом случае обе тяги 15л и 15п потянут соответствующие поворотные рули 8л и 8п в разные стороны. В результате поворотные рули 8л и 8п повернутся так, как показано на фиг.5, и практически перекроют воздушный канал 6 тяги. При этом скорость судна упадет до минимальной, и судно будет медленно перемещаться вперед на максимальной высоте воздушной подушки. Если форма поворотных рулей 8 такова, что они перекроют воздушный канал 6 тяги полностью, судно остановится и зависнет над расположенной под ним поверхностью. При отпускании рукояток 13л и 13п упругое свойство элемента 16 связи вызовет возвращение рукояток 13 в нейтральное положение (по фиг.3), поворотные рули 8 займут положение в направлении оси 9, и судно вновь начнет двигаться вперед. Понятно, что в случае двухзвенного элемента 16 связи его функционирование будет происходить в соответствии с конкретным выполнением этого двухзвенного элемента 16 связи, однако перемещение судна будет происходить точно так же, как описано выше для однозвенного элемента 16 связи.
Таким образом, заявленные система управления и способ обеспечения управления судном на воздушной подушке позволяют достичь указанный выше технический результат, заключающийся в упрощении управления судном на воздушной подушке, в особенности маломерного судна, за счет простого и удобного средства управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБЕСПЕЧЕНИЯ УПРАВЛЕНИЯ СУДНОМ НА СЖАТОМ ПНЕВМОПОТОКЕ | 2018 |
|
RU2671117C1 |
| УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА ПЕРЕДВИЖЕНИЯ И УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ НА ВОЗДУШНОЙ ПОДУШКЕ | 2014 |
|
RU2567720C1 |
| Рулевое управление судна на воздушной подушке | 1983 |
|
SU1169287A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО НА ВОЗДУШНОЙ ПОДУШКЕ | 2006 |
|
RU2323112C2 |
| СУДНО НА ВОЗДУШНОЙ ПОДУШКЕ | 2014 |
|
RU2551588C1 |
| Система управления движителями катера на воздушной подушке | 1980 |
|
SU926877A1 |
| АМФИБИЙНОЕ СУДНО НА ВОЗДУШНОЙ ПОДУШКЕ | 1997 |
|
RU2126753C1 |
| Подъемно-движительная установка судна на воздушной подушке | 1979 |
|
SU1056539A1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ УПРАВЛЕНИЯ СУДНОМ НА СЖАТОМ ПНЕВМОПОТОКЕ | 2018 |
|
RU2675744C1 |
| АМФИБИЙНОЕ СУДНО НА ВОЗДУШНОЙ ПОДУШКЕ | 2006 |
|
RU2349475C2 |

Изобретение относится к транспортным средствам на воздушной подушке. Согласно способу обеспечения управления судном на воздушной подушке судно оснащают двумя поворотными рулями на выходе воздушного канала тяги. На пилотском месте устанавливают две рукоятки с возможностью независимого перемещения каждой рукоятки вокруг соответствующей оси вращения. Каждую рукоятку соединяют с поворотным рулем так, что перемещение этой рукоятки приводит к повороту руля. Для обеспечения совместного перемещения обеих рукояток их соединяют посредством элемента связи, имеющего шарнирные соединения на концах. Элемент связи выполняют с возможностью изменения расстояния между обеими рукоятками при приложении к ним усилия во встречном направлении. При однонаправленном повороте рукояток рули поворачиваются в одну сторону, встречное движение рукояток вызывает поворот рулей в разные стороны. Достигается упрощение управления судном на воздушной подушке. 2 н. и 12 з.п. ф-лы, 5 ил.
1. Способ обеспечения управления судном на воздушной подушке,
имеющим воздушный канал тяги и пилотское место, заключающийся в том, что:
устанавливают на выходе воздушного канала тяги по меньшей мере одну группу из двух поворотных рулей с осями вращения этих поворотных рулей в плоскости, практически перпендикулярной оси воздушного канала тяги;
устанавливают на пилотском месте две рукоятки на заранее заданном расстоянии друг от друга и примерно на одном уровне от пола пилотского места с возможностью независимого перемещения каждой рукоятки вокруг соответствующей оси вращения;
обеспечивают соединение каждой рукоятки с по меньшей мере одним из поворотных рулей по меньшей мере одной группы так, что перемещение этой рукоятки приводит к повороту соответствующего руля в каждой группе;
связывают обе рукоятки с помощью элемента связи с шарнирными соединениями на концах для получения кинематической цепи, обеспечивающей совместное перемещение обеих рукояток, что вызывает поворот обоих рулей в каждой группе в одну и ту же сторону;
при этом выполняют элемент связи с возможностью изменения расстояния между обеими рукоятками при приложении к ним по меньшей мере заранее заданного усилия во встречном направлении, что вызывает поворот обоих рулей в группе в разные стороны.
2. Способ по п.1, в котором оси вращения поворотных рулей в каждой группе располагают на выходе воздушного канала тяги практически параллельно друг другу в направлении, близком к вертикальному.
3. Способ по п.1, в котором оси вращения поворотных рулей в каждой группе располагают на выходе воздушного канала тяги наклонно к вертикальному направлению, так что точка пересечения осей вращения поворотных рулей каждой группы находится в верхней части воздушного канала тяги.
4. Способ по п.1, в котором располагают оси вращения рукояток параллельно друг другу.
5. Способ по п.1, в котором соединение каждой рукоятки с одним из поворотных рулей в группе осуществляют тросом в упругой оболочке, способным передавать как тянущее усилие, так и толкающее усилие.
6. Способ по п.1, в котором элемент связи выполняют однозвенным, выбранным из группы, состоящей из следующего: эластомерная вставка; газовая пружина; телескопическая пружина; цилиндрическая пружина.
7. Способ по п.1, в котором элемент связи выполняют двухзвенным с упругим шарнирным соединением звеньев, которое обеспечивают средством, выбранным из группы, состоящей из следующего: эластомерная вставка между звеньями; цилиндрическая пружина между звеньями; витая пружина, огибающая шарнирное соединение; объемная пружина, охватывающая шарнирное соединение.
8. Система управления судном на воздушной подушке, имеющим воздушный канал тяги и пилотское место, содержащая:
по меньшей мере одну группу из двух поворотных рулей с осями вращения, установленных на выходе воздушного канала тяги в плоскости, перпендикулярной оси воздушного канала тяги;
две рукоятки, установленные на пилотском месте с возможностью независимого перемещения каждой рукоятки вокруг соответствующей оси вращения;
по меньшей мере две тяги, предназначенные каждая для соединения каждой рукоятки с по меньшей мере одним из поворотных рулей по меньшей мере одной группы так, чтобы перемещение этой рукоятки приводило к повороту соответствующего руля в группе;
элемент связи с шарнирными соединениями на концах, соединяющий обе рукоятки для получения кинематической цепи, обеспечивающей совместное перемещение обеих рукояток для поворота обоих рулей в группе в одну и ту же сторону;
при этом элемент связи выполнен с возможностью изменения расстояния между обеими рукоятками при приложении к ним по меньшей мере заранее заданного усилия во встречном направлении для поворота обоих рулей в группе в разные стороны.
9. Система по п.8, в которой оси вращения поворотных рулей в каждой группе расположены на выходе воздушного канала тяги практически параллельно друг другу в направлении, близком к вертикальному.
10. Система по п.8, в которой оси вращения поворотных рулей в каждой группе расположены на выходе воздушного канала тяги наклонно к вертикальному направлению, так что точка пересечения осей вращения поворотных рулей каждой группы находится в верхней части воздушного канала тяги.
11. Система по п.8, в которой оси вращения рукояток расположены параллельно друг другу.
12. Система по п.8, в которой каждая тяга выполнена в виде троса в упругой оболочке, способного передавать как тянущее усилие, так и толкающее усилие.
13. Система по п.8, в которой элемент связи выполнен однозвенным, выбранным из группы, состоящей из следующего: эластомерная вставка; газовая пружина; телескопическая пружина; цилиндрическая пружина.
14. Система по п.8, в которой элемент связи выполнен двухзвенным с упругим шарнирным соединением звеньев, которое обеспечивают средством, выбранным из группы, состоящей из следующего: эластомерная вставка между звеньями; цилиндрическая пружина между звеньями; витая пружина, огибающая шарнирное соединение; объемная пружина, охватывающая шарнирное соединение.
| Рулевое управление судна на воздушной подушке | 1983 |
|
SU1169287A1 |
| Способ моделирования стафилококковой пневмонии | 1979 |
|
SU1005168A1 |
| Устройство для автоматического регулирования процессов переходных режимов электропривода | 1941 |
|
SU69816A1 |
| US 5370197 A, 06.12.1994. | |||

