Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству и способу приготовления пищи на основании толщины продукта и/или распознавания.
Уровень техники
Устройство приготовления пищи, содержащее две поверхности, обычно готовит пищу путем контакта с противоположными сторонами пищевого продукта. Устройство приготовления пищи такого типа используется в различных устройствах приготовления. Например, в створчатом гриле используются нижняя плита и верхняя плита, которая выполнена с возможностью перемещения к нижней плите и от нее. Примеры створчатых грилей приведены в патентах США №№ 6079321 и Re 32994. Устройством другого типа является тостер, у которого одна поверхность является плитой, а вторая поверхность - ленточным транспортером. Ленточный транспортер и плита могут быть вертикальными, горизонтальными или располагаться под углом друг к другу. Примеры таких тостеров приведены в патентах США №№ 6201218 и 6281478.
Эти известные устройства приготовления пищи, по существу, содержат механизм перемещения, который либо вручную, либо автоматически перемещает одну плиту к другой, пока плиты не войдут в контакт с противоположными сторонами пищевого продукта. Например, створчатый гриль по патенту США № 6079321 автоматически управляет перемещением на основании набора параметров, которые нужно ввести в контроллер для каждого типа пищевых продуктов. К таким параметрам относится заданная величина зазора, который является рабочим расстоянием между двумя плитами, позволяющая размещать пищевые продукты разной толщины. Такие величины зазора задаются вручную путем ввода соответствующей величины в систему управления гриля кнопкой задания величины зазора на пользовательском интерфейсе системы управления, наряду с заданием времени приготовления. Этот набор параметров приготовления (величина зазора и время приготовления) необходимо выбирать заранее, перед тем как продукт будет помещен на поверхность гриля.
Пользователь створчатого гриля также должен ввести информацию о типе приготавливаемого продукта так, чтобы контроллер использовал параметр, заданный для этого пищевого продукта. Если пользователь случайно введет неправильный тип, верхняя плита может не войти в контакт с пищевым продуктом или может создать слишком сильное давление на пищевой продукт. Поскольку набор параметров также включает время приготовления для этого типа пищевого продукта, то в результате пищевой продукт окажется недожаренным или пережаренным. Таким образом, имеется возможность человеческой ошибки во время ввода заданной величины зазора и во время выбора типа приготовляемой пищи.
Существует необходимость в устройстве приготовления пищи, которое автоматически управляет относительным перемещением двух плит для избежания ошибок пользователя.
Сущность изобретения
Устройство приготовления пищи согласно настоящему изобретению содержит первую плиту и вторую плиту, расположенные на расстоянии друг от друга. Позиционирующий механизм перемещает вторую плиту к первой плите и/или от первой плиты. Контроллер реагирует на контакт второй плиты с пищевым продуктом, расположенным на первой плите, когда вторая плита перемещается позиционирующим механизмом к первой плите, для распознавания пищевого продукта.
В одном варианте устройства приготовления пищи согласно настоящему изобретению контроллер определяет время приготовления пищи на основании распознанной толщины и введенной пользователем категории пищевого продукта.
В другом варианте устройства приготовления пищи согласно настоящему изобретению время приготовления определяется произведением квадрата толщины продукта и константы, связанной с категорией продукта.
В другом варианте устройства приготовления пищи согласно настоящему изобретению распознанная толщина определяется по длине перемещения второй плитой.
В другом варианте устройства приготовления пищи согласно настоящему изобретению длина перемещения определяется по заданной опорной точке и нерабочему положению второй плиты.
В другом варианте устройства приготовления пищи согласно настоящему изобретению устройство дополнительно содержит датчик, выполненный с возможностью выдачи сигнала, когда вторая плита, перемещаемая механизмом позиционирования к первой плите, войдет в контакт с пищевым продуктом, расположенным на первой плите. Контроллер реагирует на сигнал, тем самым распознавая пищевой продукт.
В другом варианте устройства приготовления пищи согласно настоящему изобретению контроллер выполняет процедуру приготовления для приготовления одного или более пищевого продукта, расположенного на поверхности приготовления первой плиты, с помощью второй плиты, имеющей первое рабочее положение, основанное на первой толщине пищевых продуктов. Контроллер во время процедуры приготовления поднимает и опускает позиционирующий механизм и/или вторую плиту.
В другом варианте устройства приготовления пищи согласно настоящему изобретению контроллер осуществляет контроль изменения толщины продукта во время процедуры приготовления для определения второго рабочего положения на основании второй толщины и для опускания механизма позиционирования и/или второй плиты во второе рабочее положение.
В другом варианте устройства приготовления пищи согласно настоящему изобретению устройство дополнительно содержит датчик, выполненный с возможностью выдачи сигнала, когда вторая плита войдет в контакт с пищевым продуктом. Контроллер реагирует на первое появления и второе появление сигнала для перемещения механизма позиционирования и/или второй плиты в первое и второе положение, соответственно.
В другом варианте устройства приготовления пищи согласно настоящему изобретению контроль изменения толщины продукта заставляет контроллер поднять механизм позиционирования и/или вторую плиту из первого рабочего положения и на основании второго появления сигнала заставляет контроллер переместить механизм позиционирования и/или вторую плиту во второе рабочее положение.
В другом варианте устройства приготовления пищи согласно настоящему изобретению подъем и опускание осуществляется для выпуска влаги из пищевых продуктов.
В другом варианте устройства приготовления пищи согласно настоящему изобретению контроллер во время процедуры приготовления контролирует выпускание влаги, поднимая механизм позиционирования и/или вторую плиту на заданное расстояние над поверхностью приготовления первой плиты, удерживая вторую плиту на заданном расстоянии в течение времени Т и по истечении времени Т опуская механизм позиционирования и/или вторую плиту к первой плите.
Согласно способу настоящего изобретения пищевой продукт готовится на устройстве приготовления пищи, содержащем первую и вторую плиту. Способ включает этапы, на которых перемещают вторую плиту к первой плите и в ответ на контакт второй плиты с пищевым продуктом, расположенным на первой плите, распознают пищевой продукт с учетом его толщины.
В одном варианте способа согласно настоящему изобретению на основании распознанного пищевого продукта и введенной пользователем категории продукта определяют время приготовления пищевого продукта.
В другом варианте способа согласно настоящему изобретению время приготовления определяют произведением квадрата толщины продукта и константы, связанной с категорией продукта.
В другом варианте способа согласно настоящему изобретению толщину определяют по длине перемещения второй плиты.
В другом варианте способа согласно настоящему изобретению длину перемещения определяют по заданной опорной точке и нерабочему положению второй плиты.
В другом варианте способа согласно настоящему изобретению способ дополнительно включает этап, на котором выдают сигнал, когда вторая плита при перемещении механизмом позиционирования к первой плите контактирует с пищевым продуктом. Этот сигнал используют на этапе распознавания для распознавания пищевого продукта с учетом его толщины.
В другом варианте способа согласно настоящему изобретению способ дополнительно включает этап, на котором на основании толщины перемещают вторую плиту в первое рабочее положение, осуществляют процедуру приготовления пищевого продукта и во время процедуры приготовления поднимают и опускают вторую плиту.
В другом варианте способа согласно настоящему изобретению способ дополнительно включает этап, на котором определяют второе рабочее положение на основании второй толщины пищевого продукта и перемещают вторую плиту во второе рабочее положение.
В другом варианте способа согласно настоящему изобретению способ дополнительно включает этап, на котором выдают сигнал, когда вторая плита войдет в контакт с пищевым продуктом и в ответ на первое появление и второе появление сигнала перемещают вторую плиту в первое и второе положение соответственно.
В другом варианте способа согласно настоящему изобретению способ дополнительно включает этап, на котором поднимают вторую плиту из первого рабочего положения и на основании второго появления сигнала перемещают вторую плиту во второе рабочее положение.
В другом варианте способа согласно настоящему изобретению подъем и опускание выполняют для выпуска влаги из пищевых продуктов.
В другом варианте способа согласно настоящему изобретению во время процедуры приготовления вторую плиту поднимают на заданное расстояние над поверхностью приготовления первой плиты. Вторую плиту удерживают на заданном расстоянии в течение времени Т. По истечении времени Т вторую плиту опускают к первой плите.
Краткое описание чертежей
Далее следует подробное описание объектов, преимуществ и признаков настоящего изобретения со ссылками на прилагаемые чертежи, на которых одинаковые элементы обозначены одинаковыми ссылочными позициями.
Фиг.1 представляет собой вид в перспективе одного варианта устройства приготовления пищи с двумя поверхностями согласно настоящему изобретению.
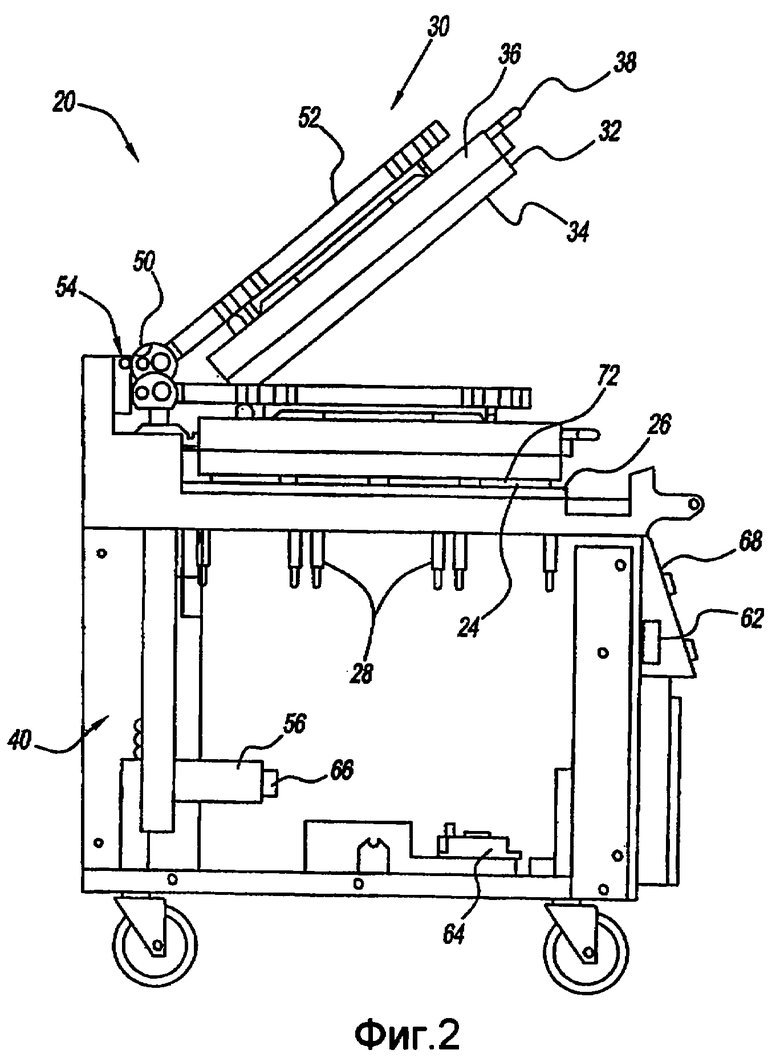
Фиг.2 представляет собой вид сбоку устройства приготовления пищи с двумя поверхностями по фиг.1.
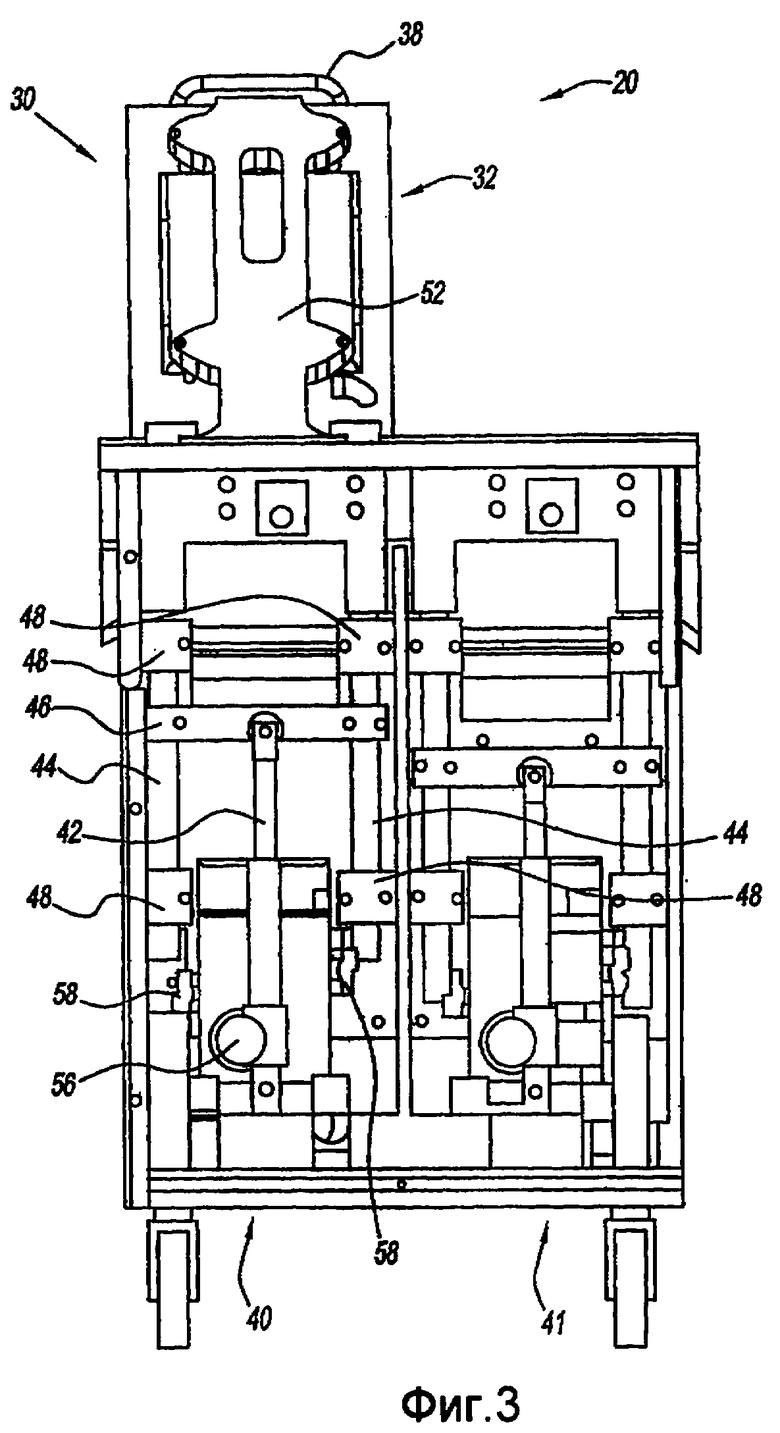
Фиг.3 представляет собой вид сзади устройства приготовления пищи с двумя поверхностями по фиг.1.
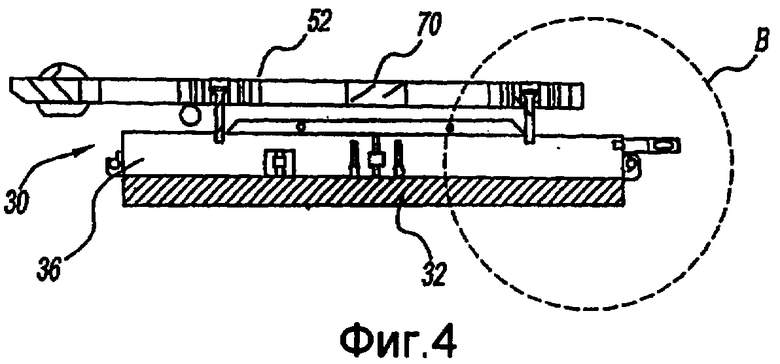
Фиг.4 представляет собой вид сверху узла верхней плиты устройства приготовления пищи с двумя поверхностями по фиг.1.
Фиг.5 представляет собой вид в поперечном сечении по линии 5 на фиг.4.
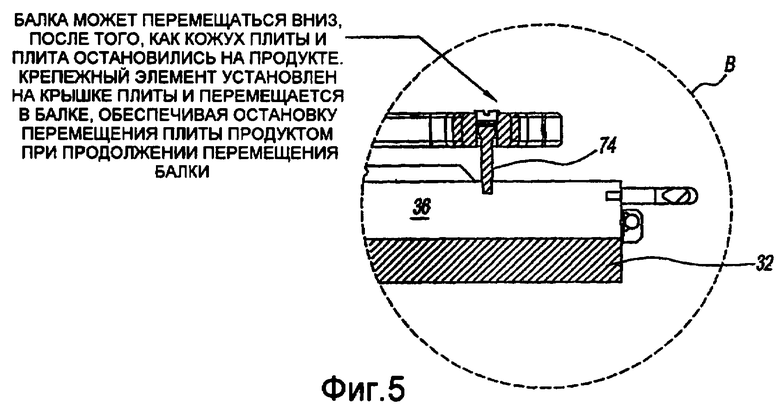
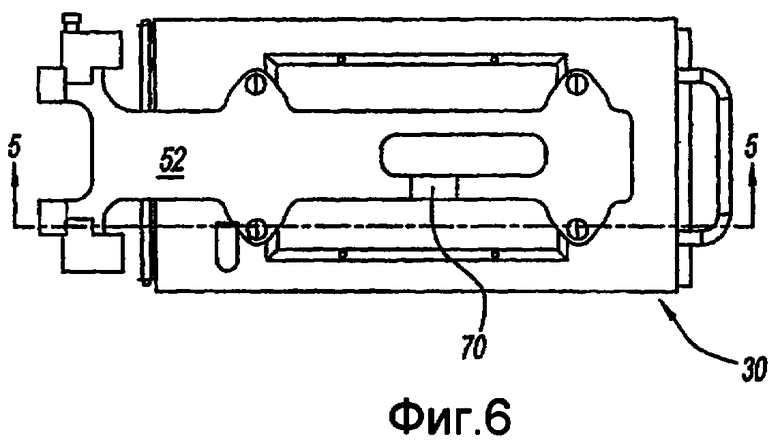
Фиг.6 представляет собой вид элемента В на фиг.5.
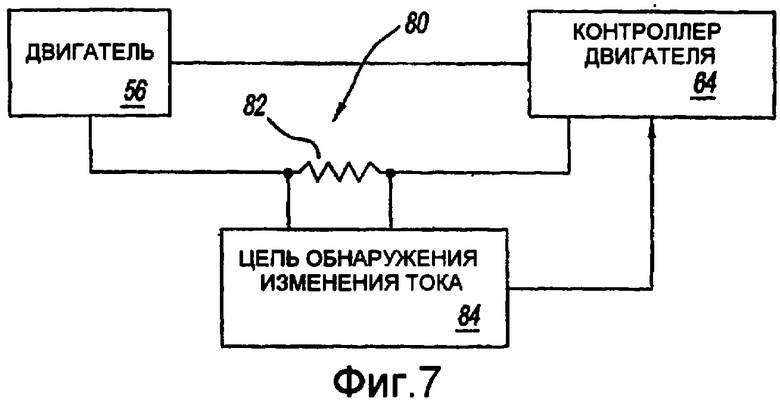
Фиг.7 представляет собой блок-схему альтернативного варианта датчика устройства приготовления пищи с двумя поверхностями согласно настоящему изобретению.
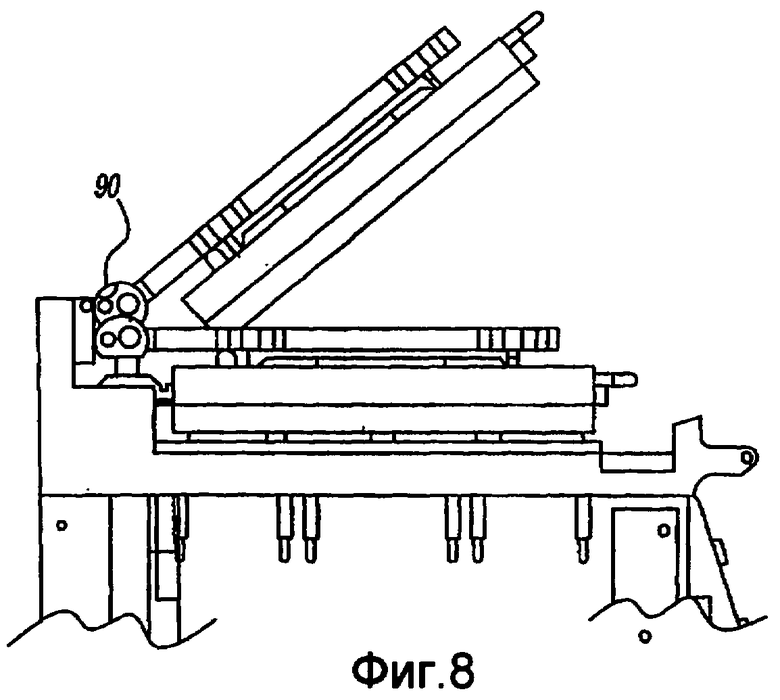
Фиг.8 представляет собой вид сбоку части устройства приготовления пищи с двумя поверхностями по фиг.1, где показан другой вариант датчика.
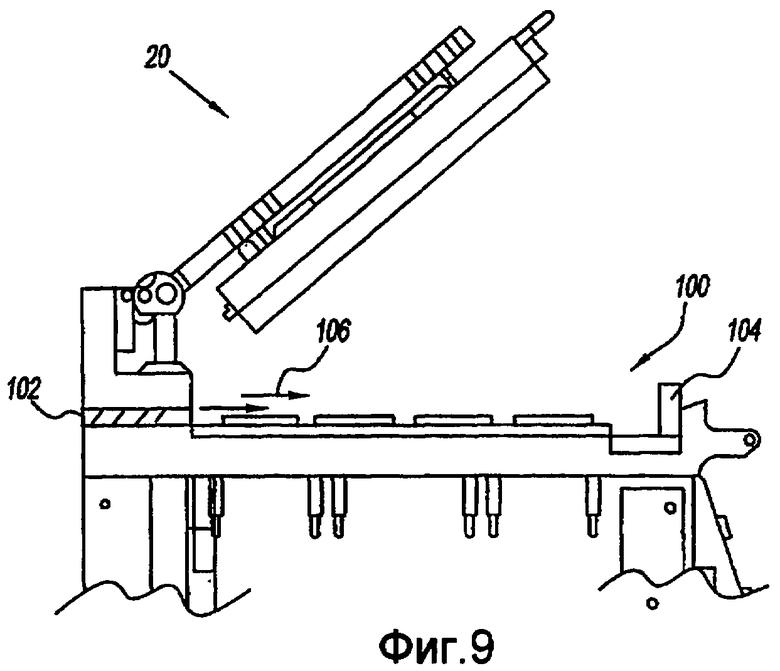
Фиг.9 представляет собой вид сбоку части устройства приготовления пищи с двумя поверхностями по фиг.1, где показан другой вариант датчика.
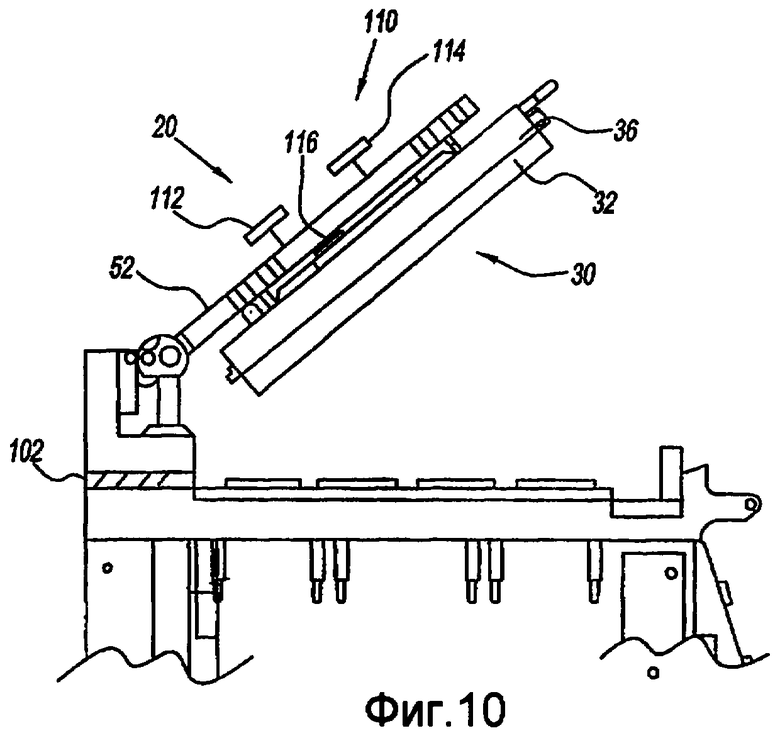
Фиг.10 представляет собой вид сбоку части устройства приготовления пищи с двумя поверхностями по фиг.1, где показан другой вариант датчика.
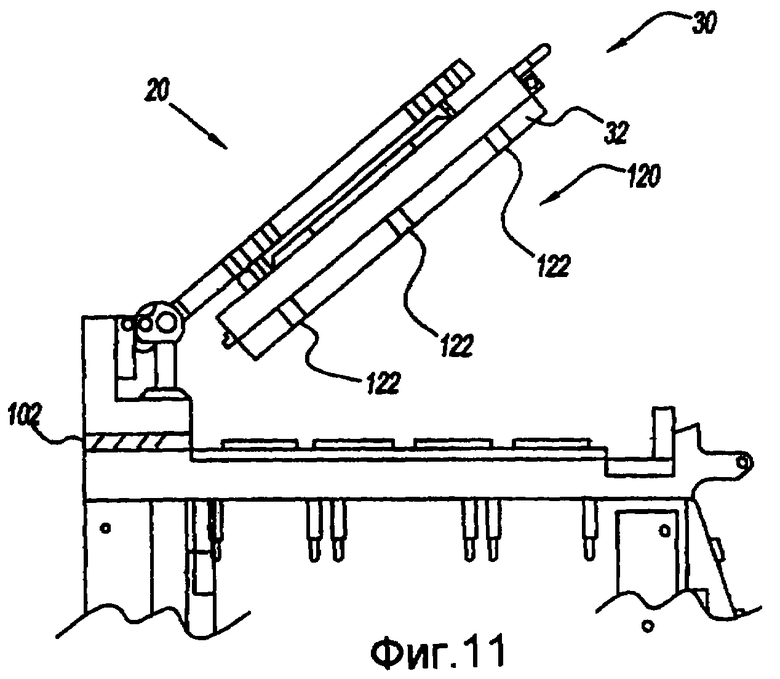
Фиг.11 представляет собой вид сбоку части устройства приготовления пищи с двумя поверхностями по фиг.1, где показан другой вариант датчика.
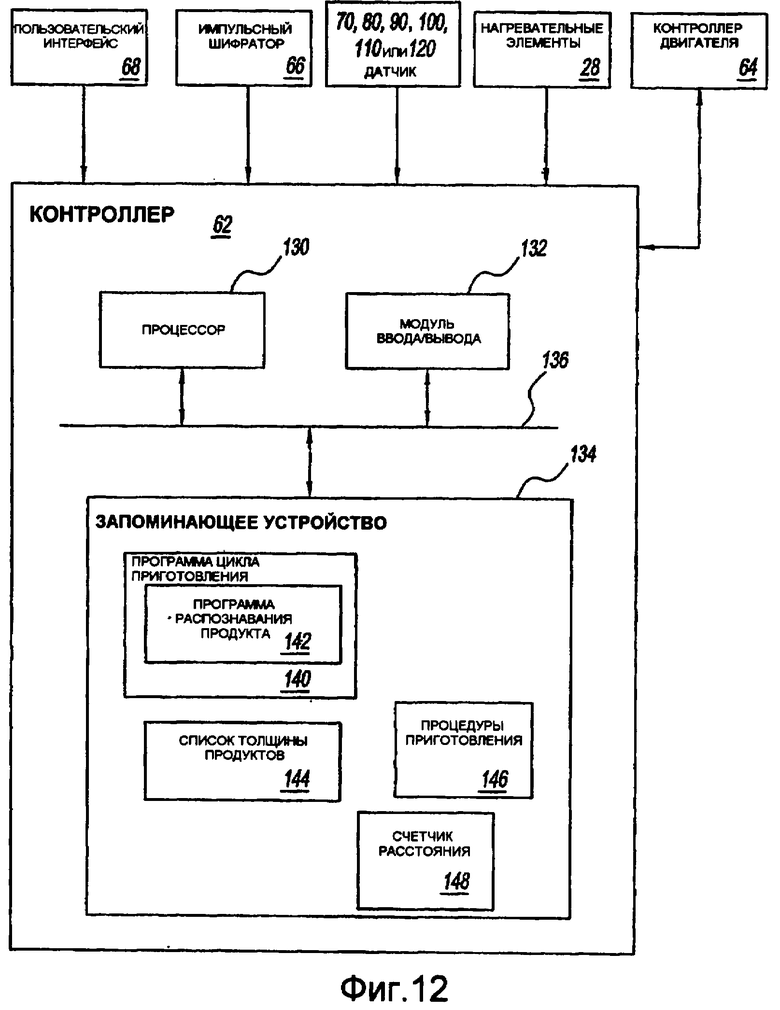
Фиг.12 представляет собой блок-схему предпочтительного варианта выполнения контроллера устройства приготовления пищи по фиг.1.
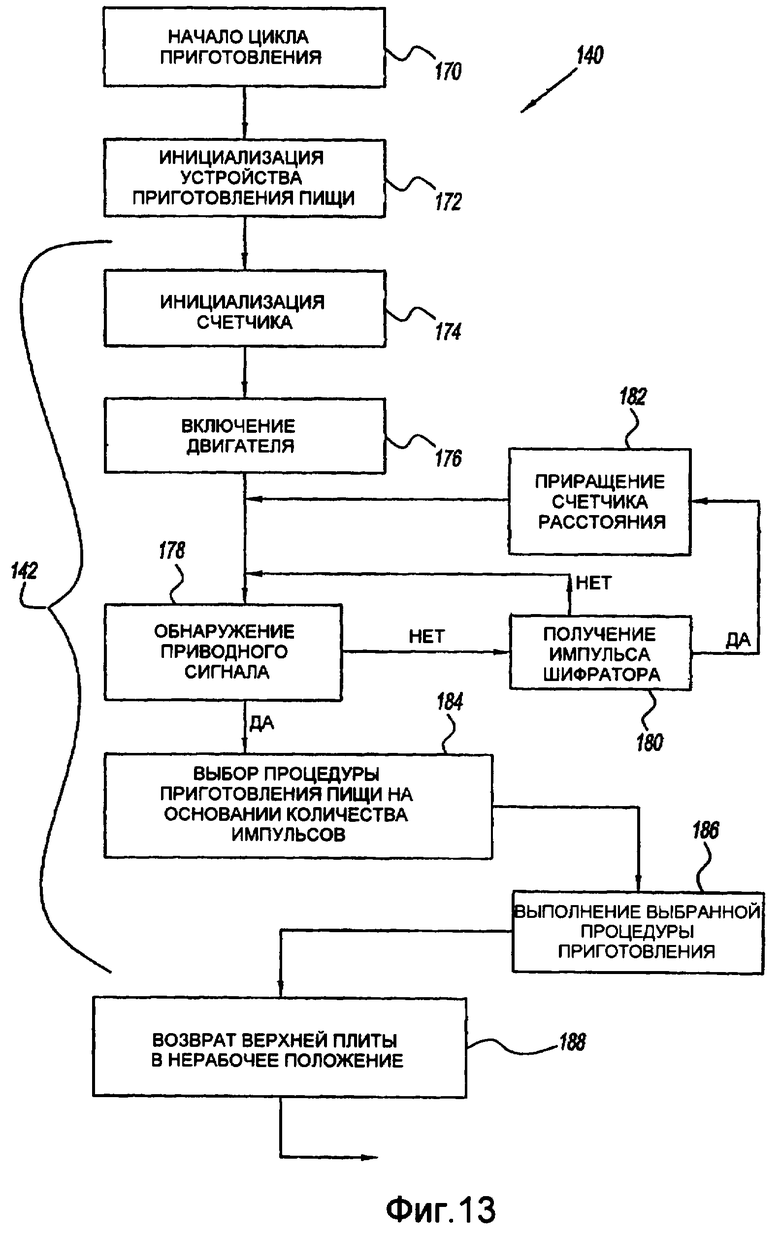
Фиг.13 представляет собой структурную схему программы распознавания пищевого продукта контроллера по фиг.12.
Фиг.14 представляет собой структурную схему другого варианта программы, которая может использоваться в устройстве приготовления пищи по фиг.1.
Фиг.15 представляет собой структурную схему управления выпуском влаги согласно настоящему изобретению.
Фиг.16 представляет собой график зависимости температуры от времени процедуры приготовления.
Фиг.17 представляет собой структурную схему программы компенсации времени приготовления пищи согласно настоящему изобретению.
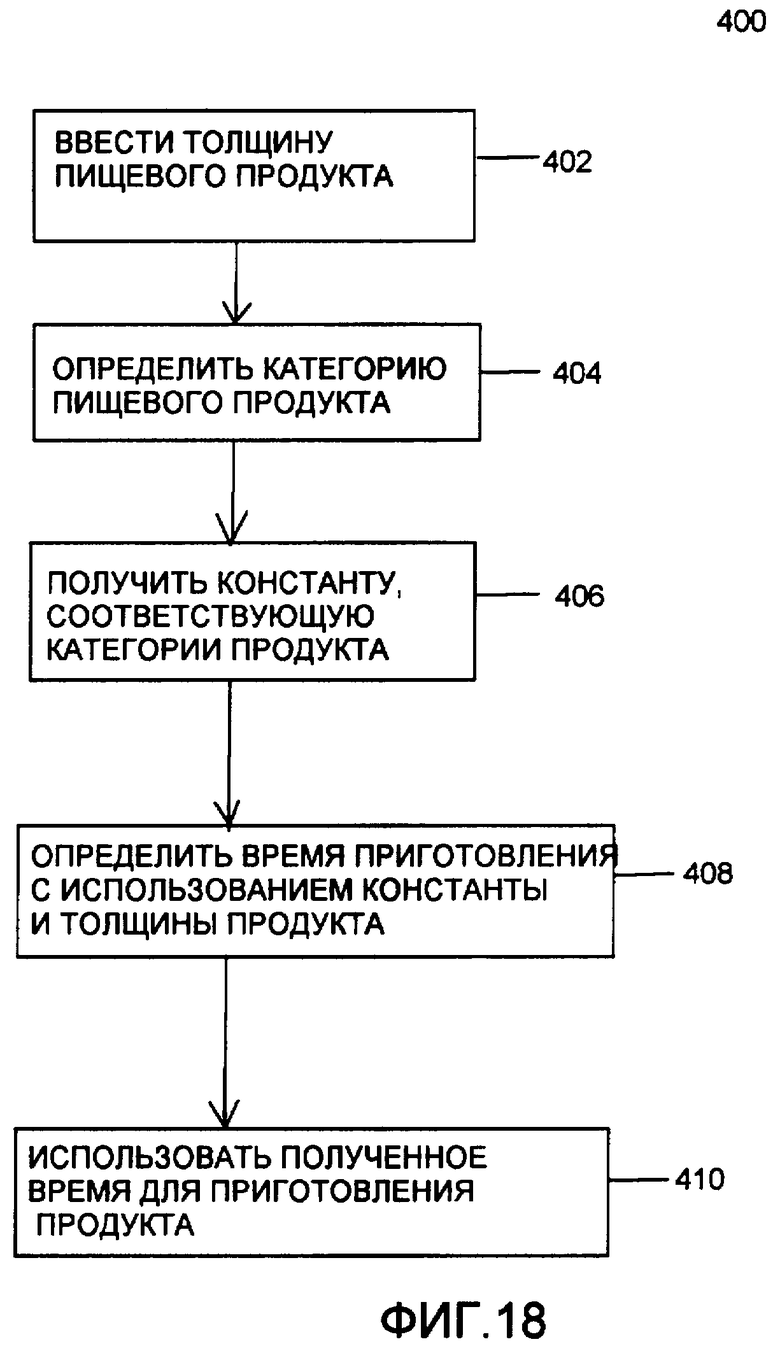
Фиг.18 представляет собой структурную схему другого варианта программы распознавания пищевого продукта согласно настоящему изобретению.
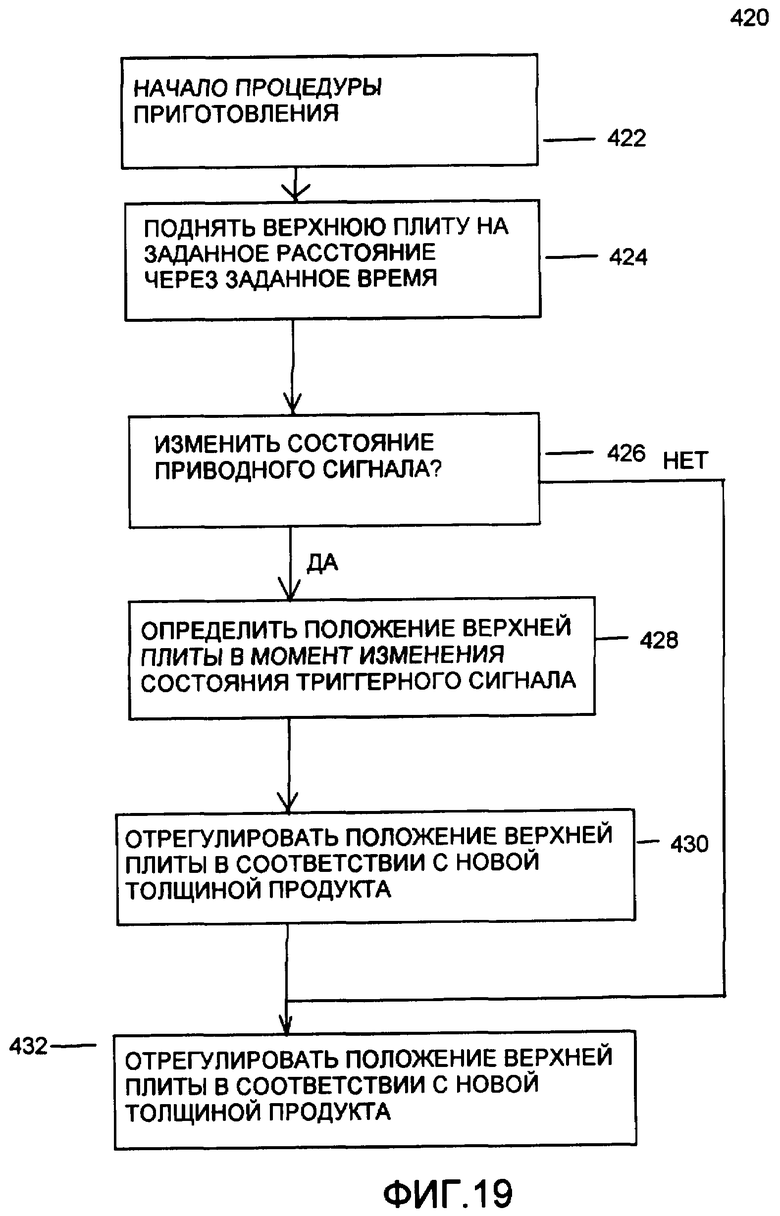
Фиг.19 представляет собой структурную схему контроля изменения толщины продукта согласно настоящему изобретению.
Описание предпочтительного варианта осуществления изобретения
Предполагается, что настоящее изобретение может использоваться в различных типах устройства приготовления пищи с двумя поверхностями, например в двухстороннем контактном тостере, в створчатом гриле и т.п. Однако для примера и полноты описания настоящее изобретение будет описано ниже в варианте створчатого гриля.
Как показано на фиг.1-3, устройство приготовления пищи, имеющее две поверхности, согласно настоящему изобретению содержит опорную конструкцию 22, на которой горизонтально установлена нижняя (первая) плита 24 приготовления. Нижняя плита 24 на своей верхней стороне имеет гладкую горизонтальную поверхность 26 приготовления. Нижняя плита 24 нагревается до требуемой температуры приготовления пищи газовыми или электрическими средствами через нагревательные элементы 28 или эквивалентные газовые горелки.
Узел 30 плиты и узел 31 плиты подвижно установлены в задней части опорной конструкции 22 на механизме 40 позиционирования и механизме 41 позиционирования соответственно. Поскольку узел 30 плиты и узел 31 плиты, по существу, идентичны, подробно будет описан лишь одни узел 30 плиты. Узел 30 плиты содержит верхнюю (вторую) плиту 32, которая имеет поверхность 34. Предпочтительно, поверхность 34 нагревается до требуемой температуры приготовления пищи нагревательными элементами (не показаны), установленными внутри кожуха 36. Верхняя плита 32 выполнена либо меньше, чем нижняя плита 24, либо имеет эквивалентный размер. На передней стороне узла 30 плиты установлена ручка 38 для манипуляций вручную. Устройство 20 приготовления пищи может иметь один узел верхней плиты, или более. Хотя показаны два узла верхней плиты, в других вариантах может использоваться один узел верхней плиты или больше двух узлов верхней плиты. В предпочтительном варианте два или более отдельных узла верхней плиты установлены над единой нижней плитой, что обеспечивает большую гибкость для повара/оператора. Хотя нижняя плита 24 показана как единая плита, в альтернативных вариантах могут применяться две или более нижние плиты.
Устройство 20 приготовления пищи содержит контроллер 62 (показан на фиг.2), который соединен с нагревателями 28, контроллером 64 двигателя, пользовательским интерфейсом 68 и одной или двумя кнопками 60 включения. Контроллер 62 управляет рабочим циклом устройства 20 приготовления пищи и при этом управляет контроллером 64 двигателя и механизмом 40 позиционирования, который приводит в действие узел 30 плиты. Пользовательский интерфейс 68 содержит дисплей и различные органы управления. Кнопки 60 включения расположены на передней стороне устройства приготовления пищи и позволяют пользователю управлять узлом 30 плиты. Кнопки 61 включения расположены на передней стороне устройства приготовления пищи и позволяют пользователю управлять узлом 31 плиты.
Поскольку механизм 40 позиционирования и механизм 41 позиционирования, по существу, идентичны, подробно будет описан только механизм 40 позиционирования. Механизм 40 позиционирования обеспечивает два отдельных перемещения узла 30 плиты между верхним, или нерабочим, положением (фиг.3) и рабочим положением. На фиг.1-3 узел 30 плиты показан в нерабочем положении, а узел 31 плиты находится в рабочем положении. В этом варианте механизм 40 позиционирования содержит линейный привод 42, который соединен с двумя вертикальными совершающими возвратно-поступательное перемещение валами 44 поперечиной 46. Поперечина 46 прикреплена к вертикальным совершающим возвратно-поступательное перемещение валам 44, которые перемещаются в линейных опорах 48. Вертикальные совершающие возвратно-поступательное перемещение валы 44 прикреплены к шарнирным/упорным головкам 50. Консольная балка 52 проходит через шарнирные/упорные головки 50 через опоры 54 поворотных шарниров. Когда узел 30 плиты находится в верхнем поворотном положении, линейный привод 42 находится в максимально выдвинутом положении, вертикальные совершающие возвратно поступательное перемещение валы 44 и шарнирные/упорные головки 50 проходят вверх в положение, которое заставляет задний конец консольной балки 52 контактировать с опорами 54 поворотных шарниров. В этом положении узел 30 плиты расположен под заданным углом в диапазоне 45-60° к горизонтали.
Механизм 40 позиционирования дополнительно содержит приводной двигатель 56 и датчики 58 положения (фиг.3). Приводной двигатель 56 соединен с контроллером 64 двигателя. Импульсный шифратор 66 соединен с двигателем 56 и выдает цепочку импульсов на контроллер 62, когда двигатель 56 работает. Датчики 58 положения установлены на валах 44, совершающих возвратно-поступательное перемещение для передачи на контроллер 62 данных о положении. В альтернативных вариантах датчики 58 положения могут быть исключены.
Перед циклом приготовления пищи узел 30 плиты находится в нерабочем положении. В ответ на включение пользователем кнопки 60 контроллер 62 инициирует цикл приготовления пищи, управляя контроллером 64 двигателя для включения двигателя 56, чтобы механизм 40 позиционирования переместил узел 30 плиты из нерабочего положения в рабочее положение. Например, узел 31 плиты показан в рабочем положении.
Механизм 40 позиционирования заставляет узел 30 плиты опуститься как вертикально, так и по дуге, под воздействием консольного веса узла 30 плиты, поддерживая контакт между опорами 54 поворотных шарниров и задней частью консольной балки 52. Когда консольная балка 52 и узел 30 плиты приходят в положение, параллельное нижней плите 24, упорная часть шарнирной/упорной головки 50 останавливает поворотное перемещение консольной балки 52, в результате чего узел 30 плиты продолжает перемещаться из этой точки только вертикально вниз к поверхности 26 нижней плиты 24. Когда верхняя плита войдет в контакт с пищевым продуктом 72, контроллер 62 реагирует переводом верхней плиты 32 в рабочее положение и включением процедуры приготовления пищи. Во время процедуры приготовления верхняя плита 32 может перемещаться в соответствии с требованиями процедуры приготовления пищи. Например, верхняя плита 32 может перемещаться из-за изменения толщины пищевого продукта (потеря жира или воды) или для приложения большего или меньшего давления к пищевому продукту в разное время процедуры приготовления.
Когда процедура приготовления завершена, контроллер 62 управляет контроллером 64 двигателя для включения линейного привода 42 для перемещения узла 30 плиты вертикально вверх из рабочего положения в нерабочее. Консольный вес верхней плиты 32 поддерживает контакт между шарнирной/упорной головкой 50, пока задняя часть консольной балки 52 не войдет в контакт с опорой 54 поворотного шарнира. Это перемещение обеспечивает постоянную параллельность узла 30 нижней плите 24 на этом отрезке хода верхней плиты. Когда консольная балка 52 войдет в контакт с опорой 54 поворотного шарнира, вертикальное перемещение переходит в поворотное перемещение до точки, в которой узел 30 плиты повернется на заданный угол в нерабочее положение. Контроллер 60 выдает звуковой сигнал (например, в течение 2 секунд) перед тем, как начать перемещение вверх узла 30 плиты, чтобы оператор не препятствовал перемещению верхней плиты вверх.
В настоящем изобретении предусмотрен датчик, который выдает приводной сигнал, когда верхняя плита входит в контакт с пищевым продуктом 72. Контроллер 62 реагирует на приводной сигнал, управляя контроллером 64 двигателя так, чтобы заставить механизм 40 позиционирования перевести верхнюю плиту 32 в начальное рабочее положение. В это время контроллер 62 начинает процедуру приготовления пищи. В настоящем описании показано несколько разных вариантов датчика.
Как показано на фиг.4-6, датчик 70 расположен на консольной балке 52 механизма 40 позиционирования или прикреплен к ней. Когда верхняя плита 32 прекращает перемещение, поскольку она вошла в контакт с пищевым продуктом, она останавливается или продолжает перемещение, в зависимости от параметров приготовления пищи, введенных в контроллер 62. Механизм 40 позиционирования продолжает перемещать консольную балку 52 вертикально вниз к кожуху 36. Датчик 70 определяет небольшое изменение в расстоянии между консольной балкой 52 и кожухом 36 и выдает приводной сигнал, который заставляет механизм 40 позиционирования перевести верхнюю плиту в начальное рабочее положение.
Как показано на фиг.6, крепежный элемент 74 крепит консольную балку 52 к кожуху 36. Крепежный элемент 74 установлен в консольной балке 52 так, что он может перемещаться вертикально, когда верхняя плита 32 находится в контакте с пищевым продуктом 72. Поэтому когда верхняя плита 32 входит в контакт с пищевым продуктом 72, верхняя плита 32 останавливается, но консольная балка 52 продолжает перемещаться вниз благодаря плавающему креплению крепежного элемента 74.
В этом варианте датчик 70 предпочтительно является бесконтактным датчиком, например, модели PRX+4400, которую выпускает Hermetic Switch Inc. В качестве альтернативы датчик 70 может быть микропереключателем, например, модели E47BM530, которую выпускает Eaton/Cutler Hammer.
В качестве альтернативы датчик 70 может быть контактным датчиком, включая диэлектрический датчик и пьезоэлектрический датчик давления. Например контактным датчиком может быть модель Т107-А4Е-073, выпускаемая Piezo Systems, Inc.
В качестве альтернативы датчик 70 может быть ультразвуковым датчиком, прикрепленным к верхней плите 32, к нижней плите 24 или опорной конструкции 22 для определения изменений в ультразвуке, вызываемых контактом верхней плиты 32 с пищевым продуктом. Например, таким датчиком может быть модель EFR-RTQB40KS от Panasonic.
Хотя датчик 70 показан в конкретном положении, этот датчик 70 может устанавливаться в любом подходящем месте консольной балки 52, которое позволяет определять контакт верхней плиты 32 с пищевым продуктом 72. Например, к таким положениям относятся передняя сторона, задняя сторона, обе боковые стороны, средняя часть и другие. В альтернативном варианте датчик 70 может включать множество датчиков установленных в разных местах.
Как показано на фиг.7, датчик 80 отслеживает ток на приводном двигателе 56. Когда верхняя плита 32 входит в контакт с пищевым продуктом 72, ток двигателя изменяется. Датчик 80 определяет это изменение тока и выдает сигнал контроллеру 64 двигателя. Датчик 80 может быть выполнен отдельно от контроллера 64 двигателя или за одно целое с ним. Если датчик выполнен за одно целое с контроллером 64, отсутствует необходимость передавать сигнал от датчика 80 на контроллер 64. Датчик 80 содержит токочувствительный резистор 82 (или другую цепь измерения тока), включенную в токовую цепь двигателя. Датчик 80 также содержит цепь 84 определения изменения силы тока, которая передает приводной сигнал контроллеру 64 двигателя, когда цепь 84 определения изменения тока определяет изменение тока, указывающее на контакт верхней плиты 32 с пищевым продуктом 72. На контроллер 62 подается приводной сигнал.
Как показано на фиг.8, датчик 90 содержит тензодатчик, установленный в положении, позволяющем определить изменение нагрузки после того, как верхняя плита примет горизонтальное положение и когда вес верхней плиты 32 уменьшится за счет опоры на пищевой продукт 72. Когда датчик 90 определяет такое изменение напряжения, он выдает приводной сигнал на контроллер 62. Контролер 62 затем управляет контроллером 64 двигателя, чтобы механизм 40 позиционирования перевел верхнюю плиту 32 в рабочее положение. Как и датчик 80, датчик 90 может содержать цепь (не показана), определяющую, когда изменение в контролируемом сигнале напряжения укажет на наличие контакта верхней плиты 32 с пищевым продуктом 72.
Как показано на фиг.9, датчик 100 содержит оптический передатчик 102 и оптический приемник 104, которые установлены на задней и на передней частях соответственно устройства 20 приготовления пищи. Оптический передатчик 102 создает оптический луч 106, проходящий от задней стороны к передней на уровне, который будет перекрываться верхней плитой 32 приблизительно во время контакта с пищевым продуктом. Оптический приемник 104 принимает луч 106 и выдает приводной сигнал, когда верхняя плита 32 перекрывает луч 106. Контроллер 62 использует этот приводной сигнал для переведения верхней плиты 32 в рабочее положение. Оптический луч 106 может быть видимым или невидимым, например инфракрасным.
Как показано на фиг.10, в качестве альтернативы оптический датчик 110 установлен на консольной балке 52. Поэтому оптический передатчик 112 и оптический приемник 114 установлены на таком расстоянии друг от друга, чтобы световой луч, излучаемый оптическим передатчиком 112, пересекал зазор и попадал на оптический приемник 114. На кожухе 36 установлена заслонка 116. Когда верхняя плита 32 не находится в контакте с пищевым продуктом, заслонка 116 находится вне зазора между оптическим передатчиком 112 и оптическим приемником 114. Когда верхняя плита 32 замедляется или останавливается, она контактирует с пищевым продуктом, тогда как консольная балка 52 продолжает перемещаться к кожуху 36 так, что заслонка 116 входит в зазор и перекрывает световой луч. Оптический приемник 114 реагирует, выдавая приводной сигнал на контроллер 61. Контроллер 62 использует этот приводной сигнал для перевода верхней плиты 32 в рабочее положение.
Как показано на фиг.11, датчик 120 содержит множество датчиков 122 температуры, расположенных в разных местах верхней плиты 32. Датчики 122 температуры выдают на контроллер 62 сигналы температуры. Когда оператор включает цикл приготовления пищи, контроллер 62 осуществляет мониторинг сигналов от датчиков температуры. Когда контроллер 62, на основании сигналов от датчиков температуры, определит, что произошло заданное падение температуры в определенный период времени, он дает команду контроллеру 64 двигателя на перевод плиты 32 в рабочее положение с помощью механизма 40 позиционирования.
Для специалистов очевидно, что в любом из датчиков 70, 80, 90, 100, 110 и 120 можно использовать цепи определения для выдачи приводного сигнала из шума.
Как показано на фиг.12, контроллер 62 содержит процессор 130, соединенный шиной 136 с модулем 132 ввода/вывода и запоминающим устройством 134. Запоминающее устройство 134 может быть любым подходящим запоминающим устройством, которое включает оперативное запоминающее устройство (ОЗУ), постоянное запоминающее устройство (ПЗУ), флеш-память или другие типы запоминающих устройств или их комбинации. Процессором 130 может быть любой подходящий процессор, способный выполнять программы циклов приготовления пищи, включающие процедуры приготовления пищи. Модуль 132 ввода/вывода содержит интерфейсы для каждого из множества устройств ввода/вывода, включая пользовательский интерфейс 68, импульсный шифратор 66, датчик 70, 80, 90, 100, 120 или 120, нагревательные элементы 28, контроллер 64 двигателя и любые другие устройства ввода/вывода, имеющиеся в устройстве приготовления пищи.
В запоминающем устройстве 134 хранится информация множества программ и параметров, включая программу 140 цикла приготовления пищи, список 144 толщины продуктов, набор 146 процедур приготовления пищи и счетчик 146 расстояния. Процедуры 146 приготовления пищи включают набор процедур для использования устройством 20 приготовления пищи. Например, процедуры 146 приготовления пищи содержат процедуры для приготовления бекона, гамбургеров, куриных котлет и т.д.
Процедура приготовления пищи, например, может просто состоять из времени приготовления или может также включать температуры для различных отрезков времени приготовления, различные давления и/или расстояния зазора для верхней плиты на разных отрезках времени приготовления.
Программа 140 цикла приготовления пищи включает программу 142 распознавания пищевого продукта, которая распознает пищевой продукт 72, расположенный на поверхности 26 приготовления нижней плиты 24 по фиг.1-6. Такое распознавание основано на длине перемещения верхней плиты 32, измеренной между опорной точкой и положением, в котором она входит в контакт с пищевым продуктом 72. Когда устройство 20 приготовления пищи включают впервые из холодного состояния, используют режим разогрева перед тем как положить пищевой продукт 72 на нижнюю плиту 24. В режиме разогрева узел 30 плиты опускают, пока она не опустится на нижнюю плиту 24 и не сработает датчик 70. Включают нагреватели нижней плиты 24 и верхней плиты 32 и поверхности плит нагреваются до заданной температуры.
После разогрева верхней плиты 32 узел 30 плиты поднимают в верхнее нерабочее положение, чтобы оператор мог безопасно уложить пищевой продукт 72 на нижнюю плиту 24. Когда узел 30 плиты начинает подниматься, консольная балка 52 достигает конца плавающего перемещения, датчик 70 выходит из состояния определения и генерирует приводной сигнал, который контроллер 62 использует в качестве опорной точки. Эта опорная точка представляет начальную точку отсчета, т.е. нуль, поверхности 26 нижней плиты 24.
Когда узел 30 плиты продолжает подниматься, идет подсчет импульсов шифратора от отпорной точки до нерабочего положения. Контроллер 62 регистрирует общее количество импульсов от опорной точки до верхнего нерабочего положения, которое представляет заданную опорную величину. После того как пищевой продукт 72 будет размещен на нижней плите 24, узел 30 плиты вновь опускают. Когда верхняя плитка 32 войдет в контакт с пищевым продуктом 72, датчик 70 генерирует приводной сигнал, который используется контролером 62 для регистрации количества импульсов шифратора в момент контакта с пищевым продуктом 72. Толщина пищевого продукта представлена разностью между количеством импульсов в момент контакта с пищевым продуктом и заданным опорным количеством импульсов.
Для специалистов очевидно, что можно использовать и другие способы измерения расстояния перемещения. Например, расстояние перемещения можно измерять по времени, прошедшему между текущим числом импульсов и опорной величиной. Прошедшее время измеряется, например, путем подсчета импульсов от источника, например часов. Это прошедшее время или количество импульсов регистрируется в счетчике 148 расстояния. Программа 142 распознавания пищевого продукта использует расстояние для распознавания толщины продукта, а распознанная толщина продукта используется для выбора подходящей процедуры приготовления пищи из набора 146 процедур.
Как показано на фиг.13, программа 140 цикла приготовления начинается с шага 170, на котором запускается цикл приготовления. Шаг 170 выполняется в ответ на включение оператором кнопки 60. На шаге 172 инициализируется устройство 20. Например, включаются нагревательные элементы 28 и выполняются другие подготовительные операции (не входящие в настоящее изобретение). После инициализации устройства 20 выполняется программа 142 приготовления пищи.
На шаге 174 обнуляется счетчик расстояния 148. На шаге 176 включается двигатель. Процессор 130 через модуль 132 ввода/вывода выдает один или более сигналов на контроллер 62 двигателя, который является командой на подачу тока на двигатель 56. Это заставляет механизм 40 позиционирования опустить верхнюю плиту 32 из нерабочего положения. На шаге 178 происходит определение, был ли получен приводной сигнал от датчика (70, 80, 90, 100, 110 или 120). Если этот сигнал получен не был, на шаге 180 определяется, был ли получен импульс шифратора. Если нет, происходит возврат на шаг 178. Если на шаге 180 будет определено, что импульс шифратора получен, то на шаге 182 происходит приращение величины на счетчике 148 расстояния. Для специалистов очевидно, что величина на счетчике 148 расстояния может подвергаться отрицательному приращению от опорной величины. Программа возвращается на шаг 178 и шаги 178, 180 и 182 повторяются, пока на шаге 178 не будет определен приводной сигнал.
Если на шаге 178 определяют, что приводной импульс поступил, на шаге 184 выбирают процедуру приготовления пищи из списка 146 процедур на основании величины, оставшейся в счетчике 148 расстояния на момент поступления приводного импульса. На шаге 186 выполняют выбранную программу приготовления пищи. Когда шаг 186 будет завершен, на шаге 188 верхняя плита 32 возвращается в нерабочее положение. Для выполнения шага 188 процессор 130 через модуль 132 ввода/вывода выдает один или более сигналов на контроллер 64 двигателя, являющийся командой на подачу питания на двигатель 56. В результате механизм 40 позиционирования поднимает верхнюю плиту 32 из рабочего положения в нерабочее.
Более конкретно, на шаге 184 происходит сравнение величины расстояния, хранящейся в счетчике 148 расстояния, с величинами для разных толщин продуктов, хранящимися в списке 144 толщины продуктов. То есть, каждая величина, хранящаяся в списке 144 толщин продуктов, указывает на соответствующую толщину пищевого продукта в соответствующей процедуре приготовления. Если приводной сигнал, поступивший на счетчик 148 расстояния, соответствует промежуточной величине между двумя величинами, хранящимися в списке 144 толщин, для выбора процедуры приготовления из набора 146 используется величина, наиболее близкая к приводной величине.
В альтернативном варианте в списке 144 толщин продукта хранится интервал толщины для продукта каждой процедуры приготовления. Интервал толщины определен верхней и нижней величинами плюс/минус допуск. Интервал толщины, в который попадает приводная величина, используется для выбора соответствующей процедуры из набора 146 процедур приготовления пищи. Если приводная величина попадает между двумя интервалами толщины, используется ближайший интервал толщины. Например, заданной толщиной может быть 0,5±0,060 дюйма.
При программировании в список 144 толщины продукта и в набор 146 процедур приготовления вводят соответствующие величины толщин и процедуры для пищевых продуктов, которые будут готовиться на устройстве 20. Величины толщины и процедуры приготовления можно вводить, например, с клавиатуры или с другого устройства ввода (не показано) как по проводному, так и по беспроводному соединению.
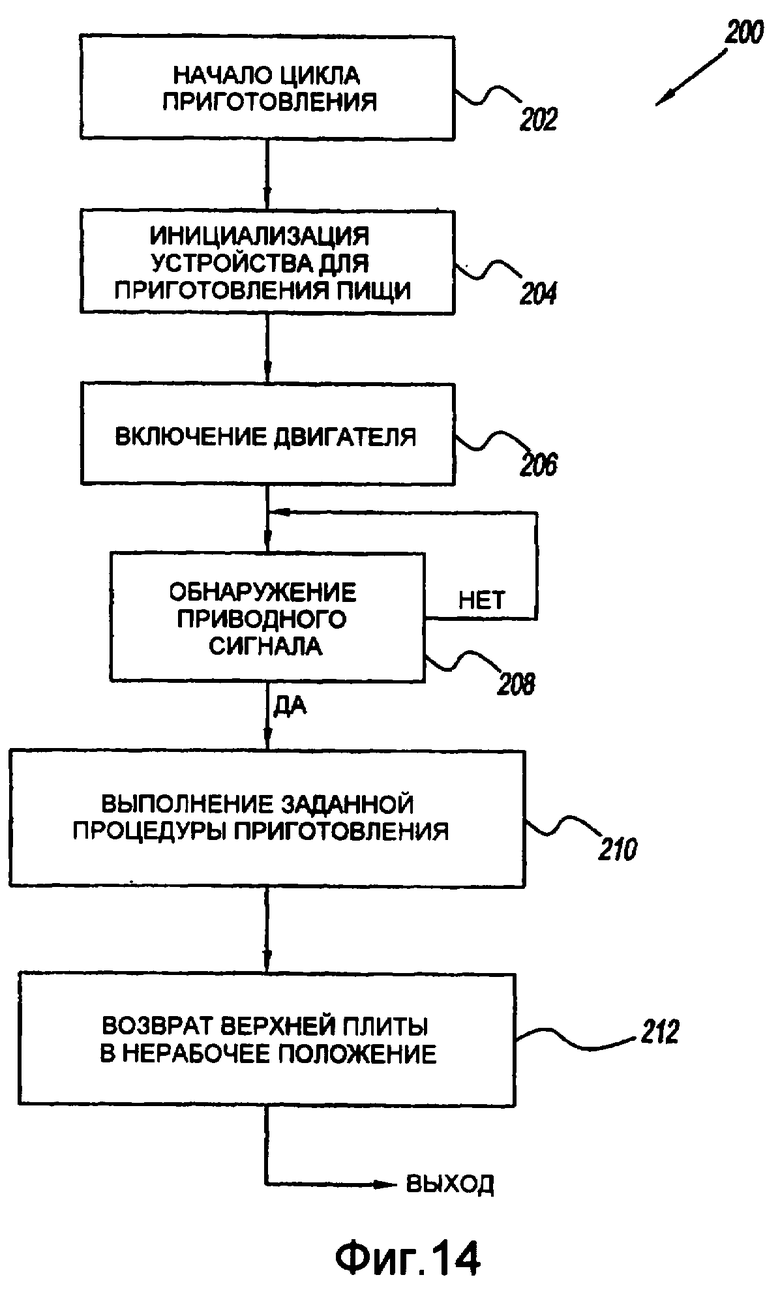
Как показано на фиг.14, альтернативный вариант программы цикла приготовления реагирует на приводной сигнал для выполнения процедуры приготовления, которая заранее задана оператором, например, через пользовательский интерфейс 68. Программа 200 цикла приготовления начинается на шаге 202, запуская цикл приготовления. Шаг 202 выполняется в ответ на включение оператором кнопки 60. На шаге 202 устройство 20 приготовления пищи инициализируется. Например, включаются нагревательные элементы 28 и выполняются другие предварительные операции (не входящие в настоящее изобретение).
На шаге 206 включается двигатель 56. Процессор 130 через модуль 132 ввода/вывода выдает один или более командных сигналов на контроллер 64 двигателя для подачи питания на двигатель 56. Это заставляет механизм 40 позиционирования опустить верхнюю плиту 32 из нерабочего положения. На шаге 208 определяется, был ли получен приводной сигнал от датчика (70, 80, 110 или 120). Если нет, то шаг 208 повторяется. Если на шаге 208 определяется поступление приводного сигнала, то на шаге 208 выполняется заданная процедура приготовления. По завершении заданной процедуры приготовления на шаге 212 верхняя плита 32 возвращается в нерабочее положение. Процессор 130 через модуль 132 ввода/вывода выдает один или более командный сигнал на контроллер 64 двигателя для подачи питания на двигатель 56. Это заставляет механизм 40 позиционирования поднять верхнюю плиту 32 из рабочего положения в нерабочее.
Программа или процедура приготовления любого пищевого продукта может содержать шаг или множество шагов, на которых верхняя плита поднимается от пищевого продукта на запрограммированное расстояние и время для выпуска влаги.
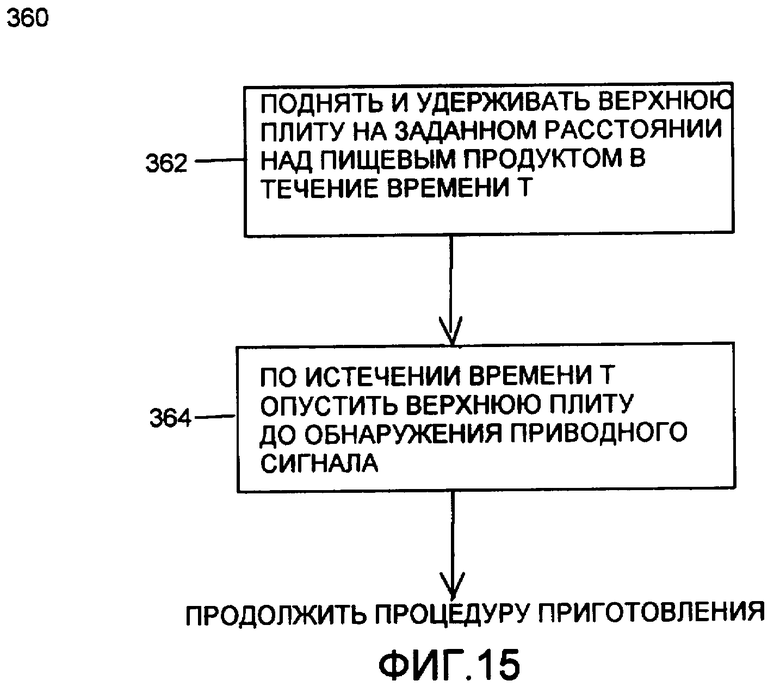
Как показано на фиг.15, функция выпуска влаги согласно настоящему изобретению представляют собой модуль 360 выпуска влаги, который может осуществляться контроллером 62 во время процедуры приготовления пищи. Модуль 360 выпуска влаги на шаге 362 поднимает верхнюю плиту 32 на заданное расстояние над пищевым продуктом. Когда верхняя плита 32 поднимается, приводной сигнал переходит из состояния ВКЛ. в состояние ВЫКЛ. Контроллер 62 удерживает верхнюю плиту 32 в этом положении в течение заданного времени Т, выбранного для выпуска влаги. По истечении заданного времени Т на шаге 364 верхняя плита 32 опускается до тех пор, пока не будет обнаружен приводной сигнал. То есть, верхняя плита 32 входит в контакт с пищевым продуктом. Эту процедуру можно повторять столько раз, сколько нужно для данного пищевого продукта.
Во время процесса приготовления пищи контроллер 62 осуществляет мониторинг профилей температуры/потребления энергии. Эти данные сравниваются с эталонными данными и используются для регулирования времени приготовления, чтобы компенсировать разницу в количестве, плотности, начальной температуре приготовления (замороженный/размороженный исходный продукт) и пр. Контроллер 62 затем компенсирует время приготовления пищи, увеличивая или уменьшая его в зависимости от температурного профиля для конкретной толщины продукта для улучшения операции приготовления при неполной или частичной загрузке и для повышения качества готового продукта. Контроллер 62 также может использовать данные о температурном профиле/потреблении энергии и о толщине продукта для определения нужной программы приготовления при данном потреблении энергии и выбранном продукте (например, при более/менее плотных продуктах и замороженных/размороженных продуктах).
Падение температуры во время цикла приготовления или на части цикла приготовления вместе с информацией о включении и выключении нагревателей также дает информацию о тепловой нагрузке на приготавливаемый продукт. Тепловая нагрузка меняется в зависимости от нескольких переменных, таких как количество пищевых продуктов, начальная температура продуктов, содержание воды в продукте, плотность пищевых продуктов.
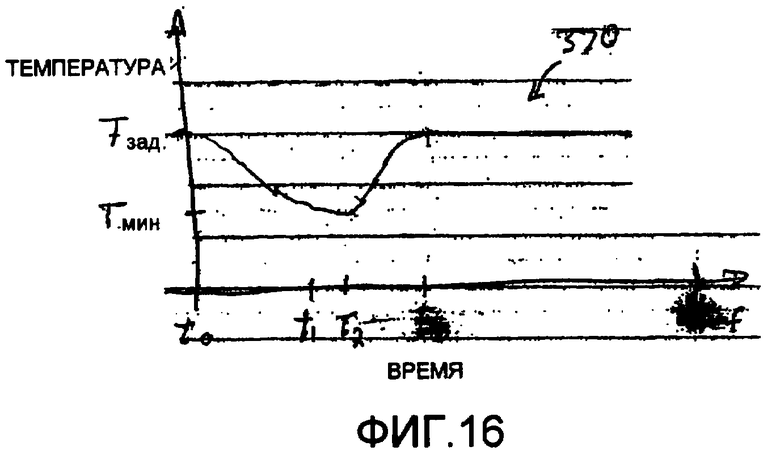
Как показано на фиг.16, кривая 370 представляет эталонный график температуры одной из плит (например, нижней плиты 24) для процедуры приготовления эталонного количества конкретного пищевого продукта. В начале цикла приготовления нижняя плита 24 и верхняя плита 32 предварительно разогреваются до заданной температуры Tзад для эталонного количества конкретных пищевых продуктов. Кривая 370 достигает Tзад в момент времени t0. В этот момент эталонное количество пищевых продуктов размещают на нижней плите 24 и оператор приводит в движение верхнюю плиту 32 в направлении к этим пищевым продуктам. Температура нижней плиты 24 начинает падать. К моменту t1 верхняя плита 32 входит в контакт с пищевым продуктом. В момент t2 температура нижней плиты 24 достигает минимума tмин и начинает расти. К моменту t4 температура нижней плиты достигает заданной температуры. Кривая 370 описывает простую процедуру приготовления, в которой эталонное количество пищевых продуктов готовится при постоянной заданной температуре Tзад без выпуска влаги или других функций, которые заставляют верхнюю плиту выходить из контакта с пищевыми продуктами. Для специалистов очевидно, что процедуры приготовления могут включать такие перемещения верхней плиты и разные температуры для разных этапов процедуры приготовления. Кривая 370 является кривой эталонной температурой для процедуры приготовления пищи для эталонного количества конкретного пищевого продукта. Аналогичные кривые генерируются для процедур приготовления других пищевых продуктов. Данные из этих кривых хранятся для использования при реальном приготовлении пищевых продуктов. Например, эти данные содержат температуры кривой 370, замеренные в один или более требуемый момент времени между t0 и t4.
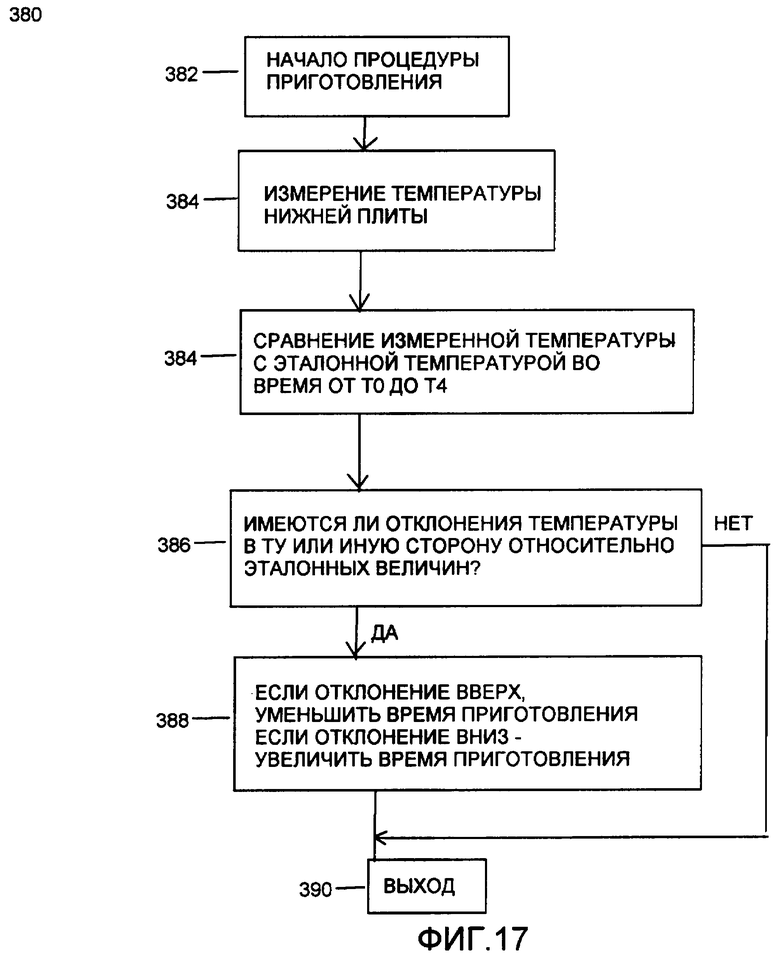
Как показано на фиг.17, программа 380 компенсации времени приготовления выполняется либо как часть программы 142 распознавания толщины продукта, либо в других прикладных программах приготовления. Для примера программа 380 компенсации времени приготовления будет описана как выполняемая вместе с программой 142 распознавания толщины продукта. Программа 380 компенсации времени приготовления начинается шагом 382 вместе с инициацией процедуры приготовления конкретного пищевого продукта. Нижняя и верхняя плиты 24 и 32 разогреты до заданной температуры Tзад. Верхняя плита 32 затем поднимается и оператор размещает заданное количество конкретных пищевых продуктов на нижней плите 24. Оператор также вызывает опускание верхней плиты на пищевые продукты. В течение периода времени от момента t0 до момента t4 на шаге 384 один раз или более измеряется температура. На шаге 386 сравнивают результаты замера температуры с эталонной температурой кривой 370. В некоторых вариантах сравнение учитывает только минимальную температуру Tмин заданного продукта и минимальную температуру Tмин эталонных продуктов. На шаге 386 определяется, отклонилась ли измеренная температура вверх или вниз от эталонной температуры больше, чем на заданную величину. Если нет, программа 380 компенсации времени приготовления завершается на шаге 390. То есть, количество приготавливаемых пищевых продуктов, по существу, равно эталонному количеству. Если имеется отклонение, превышающее заданную величину, на шаге 388 регулируется время приготовления. Например, если отклонение превышает эталонную температуру, время приготовления укорачивается. Если отклонение происходит в сторону уменьшения эталонной температуры, время приготовления увеличивается. Затем программа 380 компенсации времени приготовления завершается на шаге 390.
Как описано выше, программа 142 распознавания пищевого продукта выбирает процедуру приготовления пищи на основании величины, представляющей толщину или высоту пищевого продукта. Согласно настоящему изобретению альтернативная программа 400 распознавания пищевого продукта для определения времени приготовления использует толщину или высоту продукта и введенную пользователем категорию продукта.
Как показано на фиг.18, программа 400 распознавания пищевого продукта начинается шагом 402, на котором записывается или регистрируется толщина или высота продукта на основании величины, определенной на шагах 170-182 по фиг.13. На шаге 404 определяется категория продукта, введенная пользователем или оператором устройства 120 для приготовления пищи. Например, на пользовательском интерфейсе 68 можно установить кнопки для разных категорий продуктов, например говядина, курица, овощи и другие категории. При размещении пищевого продукта на нижней плите 24 пользователь выбирает категорию продукта. На шаге 406 выбирается константа k, основанная на категории пищевого продукта, введенной на шаге 404. На шаге 408 определяется время приготовления пищи на основании толщины продукта и введенной категории. Время приготовления рассчитывается на основании отношения:
время приготовления = (толщина продукта)2×k
Используя пользовательский интерфейс 68, оператор может вручную выбирать режим приготовления: по программе 142 распознавания пищевого продукта или по программе 400 распознавания пищевого продукта.
Как показано на фиг.19, во время приготовления пищевого продукта используется контроль 420 изменения толщины продукта, который определяет изменения (расширение или сжатие) толщины продукта, которые происходят во время приготовления. Контроль 420 изменения толщины продукта начинается с шага 422, который начинает выполняться вместе с началом цикла приготовления. На шаге 422 происходит выдержка в течение заданного времени (например, 40% от времени приготовления), после чего верхняя плита 32 поднимается на заданное расстояние (например, на 0,25 дюйма для гамбургера). На шаге 426 определяется, произошло ли изменение приводного сигнала. Если нет, выполняется шаг 432. Если да, на шаге 428 определяется положение верхней плиты 32 в момент изменения состояния приводного сигнала. Например, количество импульсов счетчика расстояния (см. шаги 180 и 182 на фиг. 13) подвергается отрицательному приращению, если состояние меняется при подъеме плиты 32. На шаге 430 происходит подстройка положения верхней плиты на основе новой толщины пищевого продукта. На шаге 432, при необходимости, во время процедуры приготовления повторяются шаги 424, 426, 428 и 430.
В любом из описанных выше процессов контроллер 62 можно запрограммировать для поддержания либо полного веса, либо частичного веса верхней плиты 32 на пищевом продукте во время программы приготовления.
Настоящее изобретение было описано со ссылками на его предпочтительные варианты, однако очевидно, что в него могут быть внесены различные изменения и дополнения, не выходящие за пределы сущности и объема изобретения, определенные в приведенной формуле изобретения.
Устройство приготовления пищи, содержащее первую и вторую плиты и имеющее функцию распознавания пищевого продукта. Механизм позиционирования выполнен с возможностью перемещения второй плиты к первой плите. Датчик определяет контакт второй плиты с пищевым продуктом, расположенным на первой плите, и выдает сигнал. Контроллер использует этот сигнал для измерения длины перемещения второй плиты. Толщина продукта является функцией длины перемещения, которая используется для выбора процедуры приготовления пищевого продукта. Затем контроллер осуществляет выбранную процедуру приготовления пищевого продукта. Датчик может содержать микропереключатель, бесконтактный датчик, контактный датчик, тензодатчик, термодатчик, оптический датчик, ультразвуковой датчик или датчик изменения нагрузки позиционирования. Изобретение обеспечивает устройство приготовления пищи, которое автоматически управляет относительным перемещением двух плит для избежания ошибок пользователя. 4 н. и 16 з.п. ф-лы, 19 ил.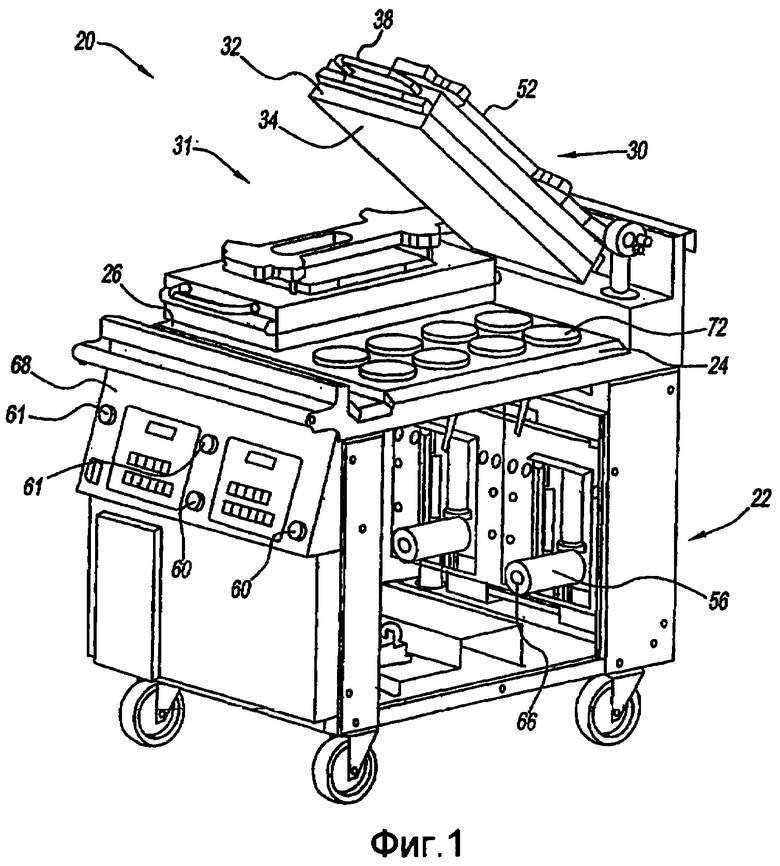
1. Устройство приготовления пищи, содержащее:
первую плиту и вторую плиту, расположенные на расстоянии друг от друга;
механизм позиционирования, выполненный с возможностью перемещения второй плиты к первой плите и/или от нее;
контроллер, реагирующий на контакт второй плиты с пищевым продуктом, расположенным на первой плите, когда вторая плита перемещается механизмом позиционирования к первой плите, для распознавания пищевого продукта на основании его толщины и определения времени приготовления пищевого продукта на основании введенной пользователем категории пищевого продукта, при этом распознанная толщина определяется по длине перемещения второй плиты, а длина перемещения определяется по заданной опорной точке и нерабочему положению второй плиты.
2. Устройство по п.1, в котором заданная опорная точка представляет собой высоту перемещения второй плиты над первой плитой.
3. Устройство по п.1, дополнительно содержащее датчик, выполненный с возможностью выдачи сигнала, когда вторая плита при перемещении механизмом позиционирования к первой плите входит в контакт с пищевым продуктом, расположенным на первой плите, при этом контроллер реагирует на этот сигнал, тем самым распознавая пищевой продукт.
4. Устройство по п.1, в котором время приготовления определяется произведением квадрата толщины продукта и константы, связанной с категорией пищевого продукта.
5. Способ приготовления пищевого продукта в устройстве приготовления пищи, содержащем первую и вторую плиты, при этом способ включает этапы, на которых:
перемещают вторую плиту к первой плите;
распознают пищевой продукт с учетом его толщины в ответ на контакт второй плиты с пищевым продуктом, расположенным на первой плите; и определяют время приготовления пищевого продукта на основании распознанного пищевого продукта и введенной пользователем категории пищевого продукта, при этом распознанную толщину определяют по длине перемещения второй плиты, а длину перемещения определяют по заданной опорной точке и нерабочему положению второй плиты.
6. Способ по п.5, в котором заданная опорная точка представляет собой высоту перемещения второй плиты над первой плитой.
7. Способ по п.5, дополнительно включающий выдачу сигнала, когда вторая плита при перемещении механизмом позиционирования к первой плите войдет в контакт с пищевым продуктом, при этом сигнал используют на этапе распознавания для распознавания пищевого продукта с учетом его толщины.
8. Способ по п.5, в котором время приготовления определяют произведением квадрата толщины продукта и константы, связанной с категорией пищевого продукта.
9. Устройство приготовления пищи, содержащее:
первую плиту и вторую плиту, расположенные на расстоянии друг от друга;
механизм позиционирования, выполненный с возможностью перемещения второй плиты к первой плите и/или от нее;
контроллер, выполняющий процедуру приготовления для приготовления одного или более пищевого продукта, расположенного на поверхности приготовления первой плиты с помощью второй плиты, имеющей первое рабочее положение, на основании первой толщины пищевого продукта, при этом контроллер во время процедуры приготовления обеспечивает подъем и опускание механизма позиционирования и/или второй плиты.
10. Устройство по п.9, в котором контроллер осуществляет изменение толщины пищевого продукта во время процедуры приготовления для определения второго рабочего положения на основании второй толщины и для опускания механизма позиционирования и/или второй плиты в это второе рабочее положение.
11. Устройство по п.10, дополнительно содержащее датчик, выполненный с возможностью выдачи сигнала, когда вторая плита войдет в контакт с пищевым продуктом, при этом контроллер реагирует на первое появление и второе появление этого сигнала для перемещения механизма позиционирования и/или второй плиты в первое и второе положения соответственно.
12. Устройство по п.11, в котором контроль изменения толщины продукта вызывает подъем контроллером механизма позиционирования и/или второй плиты из первого рабочего положения и на основании второго появления сигнала вызывает перемещение контроллером механизма позиционирования и/или второй плиты во второе рабочее положение.
13. Устройство по п.9, в котором подъем и опускание осуществляется для выпуска влаги из пищевых продуктов.
14. Устройство по п.13, в котором контроллер осуществляет выпуск влаги во время процедуры приготовления путем подъема механизма позиционирования и/или второй плиты на заданное расстояние над поверхностью приготовления первой плиты, удержание второй плиты на заданном расстоянии в течение времени Т, и по истечении времени Т опускание механизма позиционирования и/или второй плиты к первой плите.
15. Устройство по п.13, в котором во время процедуры приготовления пищи вторую плиту поднимают на заданное расстояние над поверхностью приготовления первой плиты, при этом вторую плиту удерживают на заданном расстоянии в течение времени Т, и по истечении времени Т опускают вторую плиту к первой плите.
16. Способ приготовления пищевого продукта в устройстве приготовления пищи, содержащем первую и вторую плиты, при этом способ включает этапы, на которых:
перемещают вторую плиту к первой плите;
распознают пищевой продукт с учетом его толщины в ответ на контакт второй плиты с пищевым продуктом, расположенным на первой плите;
перемещают вторую плиту в первое рабочее положение на основании указанной толщины;
выполняют процедуру приготовления пищевого продукта; и
поднимают и опускают вторую плиту во время процедуры приготовления.
17. Способ по п.16, дополнительно включающий этапы, на которых:
определяют второе рабочее положение на основании второй толщины пищевого продукта; и
перемещают вторую плиту во второе рабочее положение.
18. Способ по п.17, дополнительно включающий этапы, на которых:
выдают сигнал, когда вторая плита войдет в контакт с пищевым продуктом; и
перемещают плиту в первое и второе рабочие положения соответственно в ответ на первое появление и второе появление сигнала.
19. Способ по п.18, дополнительно включающий этапы, на которых:
поднимают вторую плиту из первого рабочего положения; и
перемещают вторую плиту во второе рабочее положение на основании второго появления сигнала.
20. Способ по п.16, в котором подъем и опускание осуществляют для выпуска влаги из пищевых продуктов.
| US 6016743 А, 25.01.2000 | |||
| US 6148718 А, 21.11.2000 | |||
| Устройство для двустороннего обжаривания пищевых продуктов | 1986 |
|
SU1558291A3 |

