Изобретение относится к информационно-измерительной технике и может быть использовано для преобразования состояния штанговой насосной установки (ШНУ) в соответствующие сигналы в отсутствии эталонной штанговой насосной установки (ШНУ), что позволяет существенно уменьшить объем оборудования, необходимого для диагностирования (ШНУ).
Известен способ диагностики (ШНУ) [патент РФ на изобретение № 1707239, МКИ 5 F04В 51/00. БИ №3, 1992. Гольдштейн Е.И., Даудрих Б.Д., Конради Л.К], включающий снятие диагностической ваттметрограммы и анализ ее параметров и в котором сначала снимают ваттметрограмму эталонной ШНУ и выделяют нулевую и первую гармоники спектра ваттметрограммы, а затем диагностируемой, в качестве основного диагностического параметра принимают отношение амплитуд нулевой и первой гармоник, при этом исправной считается ШНУ, удовлетворяющая условию
 ,
,
где С0, С1 - амплитуды нулевой и первой гармоник в спектре мощности контролируемой ШНУ; С0Э, С1Э - то же для эталонной ШНУ.
Существенным недостатком этого способа диагностирования ШНУ является необходимость определения амплитуд С0, С1 и С0Э, С1Э, а следовательно и необходимость доставки эталонной (ШНУ) к месту эксплуатации контролируемой ШНУ, так как только в режиме одновременного функционирования диагностируемой ШНУ и эталонной ШНУ возможно получение значений  и
и  .
.
Другим существенным недостатком является необходимость выделения нулевой и первой гармоник спектров ваттметрограмм эталонной ШНУ и диагностируемой ШНУ, так как периодичность обеих ваттметрограмм определяется периодом динамограмм станка-качалки (СК), который для типовых СК составляет ТСК=4÷12 с (секунд), что соответствует частотам  , то есть диапазону инфранизких частот, где реализация фильтров затруднена.
, то есть диапазону инфранизких частот, где реализация фильтров затруднена.
Но даже при создании технической возможности выделения гармоник спектра ваттметрограмм используемый критерий исправности ШНУ
позволяет лишь качественно (по системе «исправная ШНУ» - «неисправная ШНУ») определять состояние ШНУ в процессе диагностики (без определения возможной неисправности).
Известно устройство диагностирования скважинных штанговых насосов [патент РФ на изобретение № 1224444, MKH4F04B47/00, БИ № 14, 1986. Алиев Т.М.], содержащее датчики усилия P(t) и хода S(t), выходы которых подключены соответственно к входам двух преобразователей напряжения, формирователь тактовой частоты, выход которого подключен к одному из входов блока управления, имеющего выходы, соединенные с входами блока памяти, и три счетчика импульсов, причем другие входы первого и второго счетчиков импульсов подключены соответственно к выходам преобразователей напряжения, один выход второго счетчика импульсов подключен к другому входу третьего счетчиков импульсов, а другой выход второго и выход третьего счетчиков импульсов соединены с двумя входами схемы сравнения, выход которой подключен к другому входу блоку управления, блок индикации. Устройство дополнительно снабжено цифровым анализатором спектра и решающим блоком, входы цифрового анализатора спектра подключены соответственно к выходам первого счетчика импульсов, формирователя тактовой частоты и блока управления, выходы - к входу решающего блока и третьему входу блока управления, а выход решающего блока связан с входом блока индикации, причем цифровой анализатор спектра и блок памяти, а также решающий блок и блок управления соответственно взаимно связаны между собой, и решающий блок связан с блоком памяти.
Так как основу устройства диагностирования скважинных штанговых насосов составляет электронная модель эталонной ШНУ, то результатом диагностирования контролируемой ШНУ может быть установление малых отклонений зависимостей усилия P(t) и хода S(t) от соответствующих значений Рэ(t) и Sэ(t) для эталонной ШНУ.
Поэтому существенным недостатком способа диагностирования ШНУ, реализуемого рассматриваемым устройством диагностирования скважинных штанговых насосов, является невозможность диагностирования состояний ШНУ, отличных от эталонных (например: откачки нефти с газом; утечки в нагнетательном клапане и других отклонений режима работы ШНУ).
Известно устройство диагностирования скважинных штанговых насосов [Патент РФ на изобретение № 1245753, МКИ 4 F04В 47/02, БИ № 27, 1986], содержащее датчик усилия, подключенный выходом к входу преобразователя напряжения, блок управления, три выхода которого подключены соответственно к входам первого, второго и третьего счетчиков импульсов, блок памяти, выход которого подключен к входу первой схемы сравнения, а вход - к выходу первого счетчика импульсов, второй выход которого через вторую схему сравнения подключен к одному из входов блока управления, причем выход преобразователя напряжения подключен к одному из входов первого счетчика импульсов, а также блок индикации, счетчик импульсов, генератор тактовых импульсов, блок приращения и делитель, входы которого связаны с четвертым выходом блока управления и выходами второго и третьего счетчиков импульсов, а выход через первую схему сравнения подключен к второму входу блока управления, выход первого счетчика импульсов соединен с одним из входов блока приращения, два других входа блока приращения подключены к второму выходу блока памяти и пятому выходу блока управления, а три соответствующих выхода блока памяти и три соответствующих выхода блока управления связаны соответственно с тремя выходами блоков управления и блоков приращения, причем третий выход блока памяти связан с другим входом второй схемы сравнения, генератор тактовых импульсов подключен соответственно к третьему входу блока управления и входам двух основных и дополнительного счетчиков импульсов, а другой вход и выход последнего связаны соответственно с шестым выходом блока управления и входом блока индикации.
Так как основу устройства диагностирования скважинных штанговых насосов составляет электронная модель эталонной ШНУ, то результатом диагностирования контролируемой ШНУ может быть установление малых отклонений зависимостей усилия P(t) и хода S(t) от соответствующих значений Рэ(t) и Sэ(t) для эталонной ШНУ [эталонность электронной модели в рассматриваемом аналоге проявляется в меньшей мере, чем в устройстве диагностирования скважинных штанговых насосов, по авторскому свидетельству № 1224444, из-за отсутствия датчика сигнала хода Sэ(t)].
Поэтому существенным недостатком способа диагностирования состояний ШНУ реализуемого рассматриваемым устройством диагностирования скважинных штанговых насосов, является невозможность диагностирования состояний ШНУ, отличных от эталонных (как в предыдущем аналоге).
Однако определение возможных существенных отклонений режима работы ШНУ от эталонного является важной задачей.
Этот способ выбран в качестве прототипа. Таким образом, рассмотренные аналоги не обеспечивают решения задачи однозначного определения состояния ШНУ, то есть их диагностирования.
Техническим результатом заявляемого способа является принципиальная возможность однозначного определения состояния ШНУ.
Задача, на решение которой направлено техническое решение, достигается тем, что в известном способе диагностирования ШНУ, заключающемся в сравнении зависимостей P(t) и S(t) для контролируемой ШНУ с их идеальными реализациями электронной моделью ШНУ, выступающей в роли образцовой ШНУ с целью однозначного определения состояния контролируемой ШНУ подвергают дифференцированию по времени выходной сигнал датчика усилия P(t)) с последующим дискриминированном сигнала  по длительности и амплитуде.
по длительности и амплитуде.
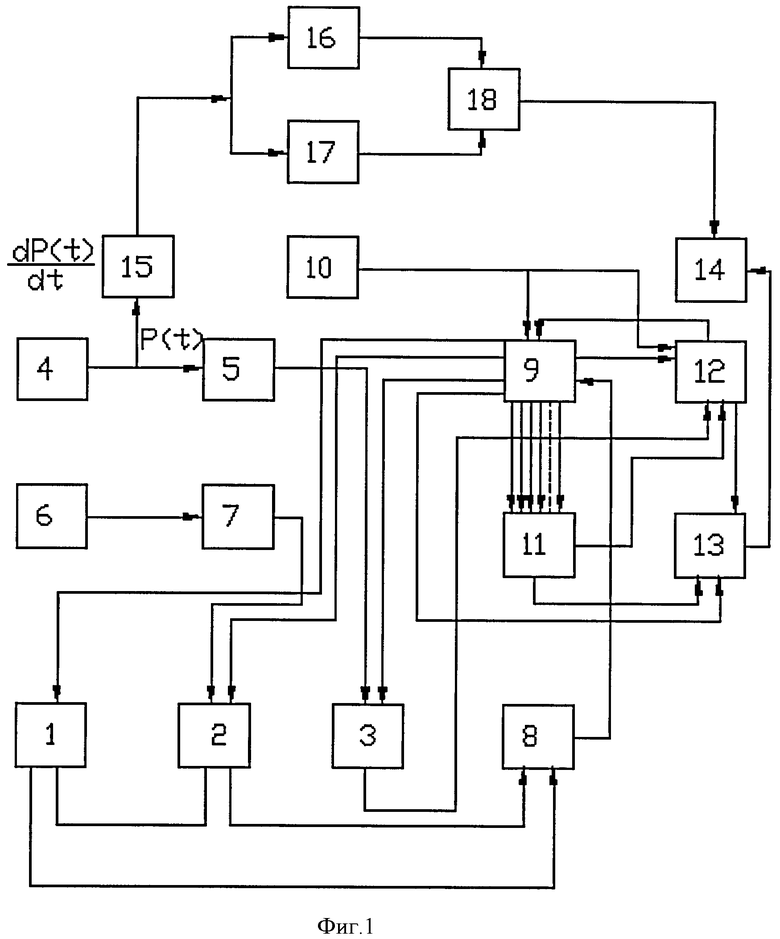
На фиг.1 показана структурная схема устройства, реализующего способ диагностирования ШНУ.
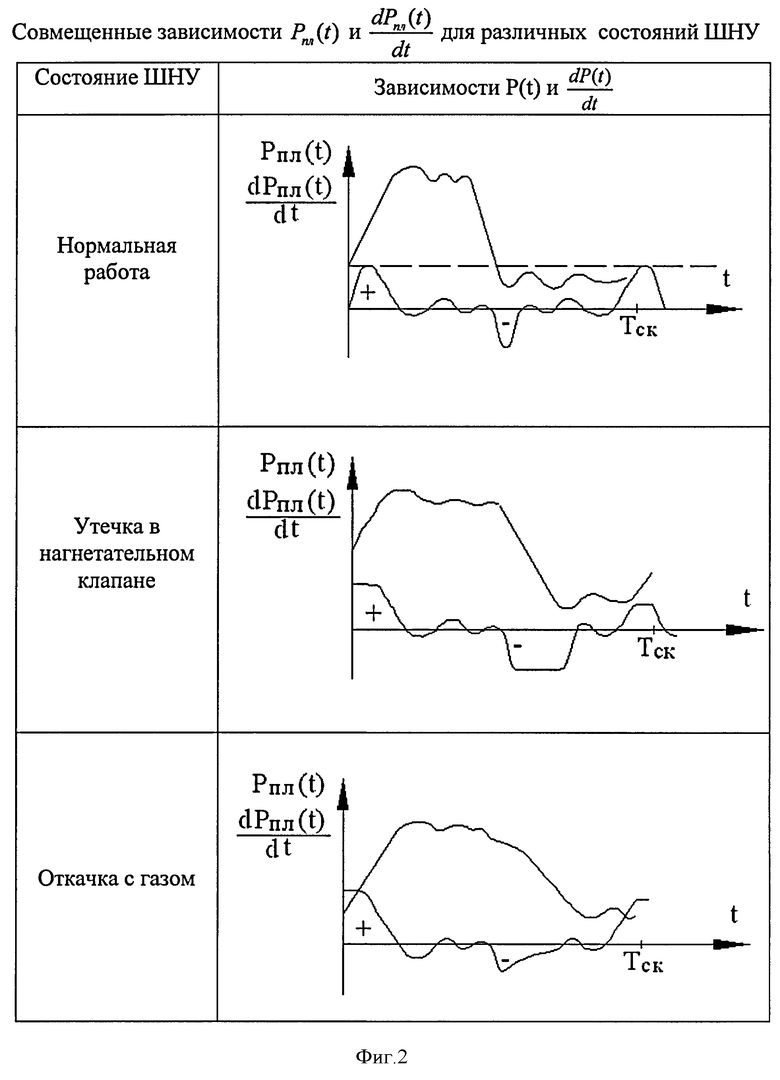
На фиг.2 представлены временные диаграммы, иллюстрирующие работу устройства.
Здесь:
1:-3 - счетчики импульсов;
4 - датчик сигнала усилия P(t);
5 - преобразователь напряжения в числовые эквиваленты;
6 - датчик хода S(t);
7 - преобразователь напряжения в числовые эквиваленты;
8 - схема сравнения числовых эквивалентов;
9 - блок управления, обеспечивающий синхронное воспроизведение зависимостей P(t) и S(t) диагностируемой ШНУ и электронной модели эталонной ШНУ;
10 - формирователь тактовой частоты, обеспечивающий временной масштаб воспроизводимых зависимостей P(t) и S(t);
11 - блок памяти, служит для хранения программы воспроизведения зависимости P(t);
12 - цифровой анализатор спектра, обеспечивающий определение числовых эквивалентов зависимостей P(t) для диагностируемой ШНУ и электронной модели эталонной ШНУ в частотной области;
13 - решающий блок, служащий для определения степени отклонения зависимостей P(t) для диагностируемой ШНУ и электронной модели эталонной ШНУ в частотной области;
14 - блок индикации, обеспечивающий визуализацию результатов вычисления решающего блока и определения состояния контролируемой ШНУ;
15 - дифференцирующее звено, обеспечивающее получение сигнала  , позволяющего однозначно определить состояние контролируемой ШНУ;
, позволяющего однозначно определить состояние контролируемой ШНУ;
16 - допусковый дискриминатор амплитуды импульсов, обеспечивающий получение перепада напряжения при превышении амплитудой импульсов Е порогового уровня;
17 - допусковый дискриминатор длительности импульсов, обеспечивающий получение перепада напряжения при превышении длительностью импульсов τ порогового уровня;
18 - блок логической обработки информативных перепадов напряжений;
Изменение характера преобразований над сигналами усилия P(t), поступающими от контролируемой ШНУ и электронной модели эталонной ШНУ, возможно на основе использования специфических свойств сигналов  контролируемой ШНУ. Действительно, результатом графического дифференцирования (то есть определения tg (тангенса) угла наклона касательных к оси времени) зависимостей P(t) для типовых состояний ШНУ(Современное состояние проблемы автоматизации диагностирования ШНУ штанговых насосных установок. Алиев Т.М., Костанян В.Р, Тер-Хачатуров А.А. «Измерения, контроль автоматизация» /Информприбор/, вып.4(68), 1988, стр.4-13) являются характерные последовательности импульсов, позволяющие организовать каналы обработки сигналов, обеспечивающие однозначное определение состояния контролируемой ШНУ.
контролируемой ШНУ. Действительно, результатом графического дифференцирования (то есть определения tg (тангенса) угла наклона касательных к оси времени) зависимостей P(t) для типовых состояний ШНУ(Современное состояние проблемы автоматизации диагностирования ШНУ штанговых насосных установок. Алиев Т.М., Костанян В.Р, Тер-Хачатуров А.А. «Измерения, контроль автоматизация» /Информприбор/, вып.4(68), 1988, стр.4-13) являются характерные последовательности импульсов, позволяющие организовать каналы обработки сигналов, обеспечивающие однозначное определение состояния контролируемой ШНУ.
Снятие динамограммы контролируемой ШНУ осуществляется с помощью датчика усилия Р(t), на выходе которого развивается напряжение, пропорциональное мгновенным значениям усилия P(t). Одновременно с выхода датчика хода снимается напряжение, пропорциональное ходу S(1). Эти напряжения преобразуются в числовые эквиваленты соответствующими преобразователями. Зависимости P(t) и S(t) диагностируемой ШНУ в виде соответствующих числовых эквивалентов сравниваются с числовыми эквивалентами эталонных зависимостей Рэ(t) и Sэ(t), записанными в блоке памяти и вызываемыми для сравнения сигналами блока управления. Результаты сравнения S(t) и 8э(t), с выхода схемы сравнения поступают в блок управления, где вырабатываются сигналы управления числом оборотов приводного двигателя ШНУ при изменении условий работы насоса (в частности, свойств закачиваемой жидкости). Результатом сравнения P(t) и Рэ(t) определяется тактовая частота формирователя. Выходные сигналы формирователя тактовой частоты определяются одновременно. Результаты сравнения частотных составляющих P(t) и Рэ(t) поступают на один из входов решающего блока, на два других входа которого подаются сигналы с выхода блока управления и выхода блока памяти, а выходные сигналы поступают на вход блока индикации, где фиксируется информация степень отклонения значений S(t) от эталонных значений Sэ(t). Для однозначного определения состояния контролируемой ШНУ сигнал усилия P(t) с выхода датчика поступает на вход дифференцирующего звена для получения на его выходе сигнала  , представляющего собой последовательность импульсов, характерную только для одного из возможных состояний ШНУ, что и вносит однозначность в определение контролируемой ШНУ. В качестве индикаторных параметров этих последовательностей выбраны амплитуды и длительности импульсов на выходе дифференцирующего звена. Этим определяется возможность однозначного определения состояния контролируемой ШНУ в результате логической обработки перепадов напряжения на выходах допусковых дискриминаторов амплитуды.
, представляющего собой последовательность импульсов, характерную только для одного из возможных состояний ШНУ, что и вносит однозначность в определение контролируемой ШНУ. В качестве индикаторных параметров этих последовательностей выбраны амплитуды и длительности импульсов на выходе дифференцирующего звена. Этим определяется возможность однозначного определения состояния контролируемой ШНУ в результате логической обработки перепадов напряжения на выходах допусковых дискриминаторов амплитуды.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ диагностики штанговых насосных установок | 1989 |
|
SU1707239A1 |
| Устройство для определения силы трения в подземной части скважинной штанговой насосной установки | 1984 |
|
SU1195052A1 |
| Устройство диагностирования скважинных штанговых насосов | 1986 |
|
SU1335678A1 |
| СПОСОБ ДИХОТОМИЧЕСКОГО ДИАГНОСТИРОВАНИЯ НЕУРАВНОВЕШЕННЫХ СКВАЖИННЫХ ШТАНГОВЫХ НАСОСНЫХ УСТАНОВОК | 1995 |
|
RU2129667C1 |
| Способ диагностики штанговых насосных установок | 1989 |
|
SU1784947A1 |
| Устройство диагностирования скважинных штанговых насосов | 1984 |
|
SU1224444A1 |
| Устройство для контроля и диагностики глубинно-насосных скважин | 1989 |
|
SU1667108A1 |
| Устройство диагностирования скважинных штанговых насосов | 1988 |
|
SU1560799A1 |
| Устройство для контроля и диагностики глубиннонасосных скважин | 1988 |
|
SU1578722A1 |
| СИСТЕМА ТЕЛЕДИНАМОМЕТРИРОВАНИЯ ГЛУБИННЫХ ШТАНГОВЫХ НАСОСОВ | 1999 |
|
RU2160385C1 |
Способ предназначен для создания устройств диагностирования состояния штанговых насосных установок, отличных от эталонных. Способ диагностирования штанговых насосных установок включает снятие динамограммы контролируемой штанговой насосной установки с одновременным определением разности текущих значений усилия P(t) и хода S(t) контролируемой штанговой насосной установки и эталонной штанговой насосной установки, реализуемой ее электронной моделью, для установления степени отклонения режима работы контролируемой штанговой насосной установки от эталонного. Далее подвергают дифференцированию по времени сигнал усилия P(t) с последующим дискриминированием сигнала  по длительности и амплитуде. Достигается принципиальная возможность однозначного определения состояния штанговых насосных установок, то есть их диагностирование. 2 ил.
по длительности и амплитуде. Достигается принципиальная возможность однозначного определения состояния штанговых насосных установок, то есть их диагностирование. 2 ил.
Способ диагностирования штанговых насосных установок, включающий снятие динамограммы контролируемой штанговой насосной установки с одновременным определением разности текущих значений усилия P(t) и хода S(t) контролируемой штанговой насосной установки и эталонной штанговой насосной установки, реализуемой ее электронной моделью, для установления степени отклонения режима работы контролируемой штанговой насосной установки от эталонного, отличающийся тем, что подвергают дифференцированию по времени сигнал усилия P(t) с последующим дискриминированием сигнала  по длительности и амплитуде.
по длительности и амплитуде.
| Устройство диагностирования скважинных штанговых насосов | 1984 |
|
SU1224444A1 |
| Способ диагностики штанговых насосных установок | 1989 |
|
SU1784947A1 |
| Способ диагностики штанговых насосных установок | 1989 |
|
SU1707239A1 |
| Устройство диагностирования скважинных штанговых насосов | 1984 |
|
SU1245753A1 |

