11
Изобретение относится к области технического диагностирования глубин но-насосного нефтяного оборудования.
Цель изобретения - повышение точ- ности диагностирования состояния скважинных штанговых насосов (СШН).
Устройство осуществляет анализ сигналов усилия на плунжере глубинного насоса путем определения отношени длительностей участков восприятия и снятия нагрузки и сравнением его с граничными значениями этого классификационного признака по каждому классу состояния СШН,
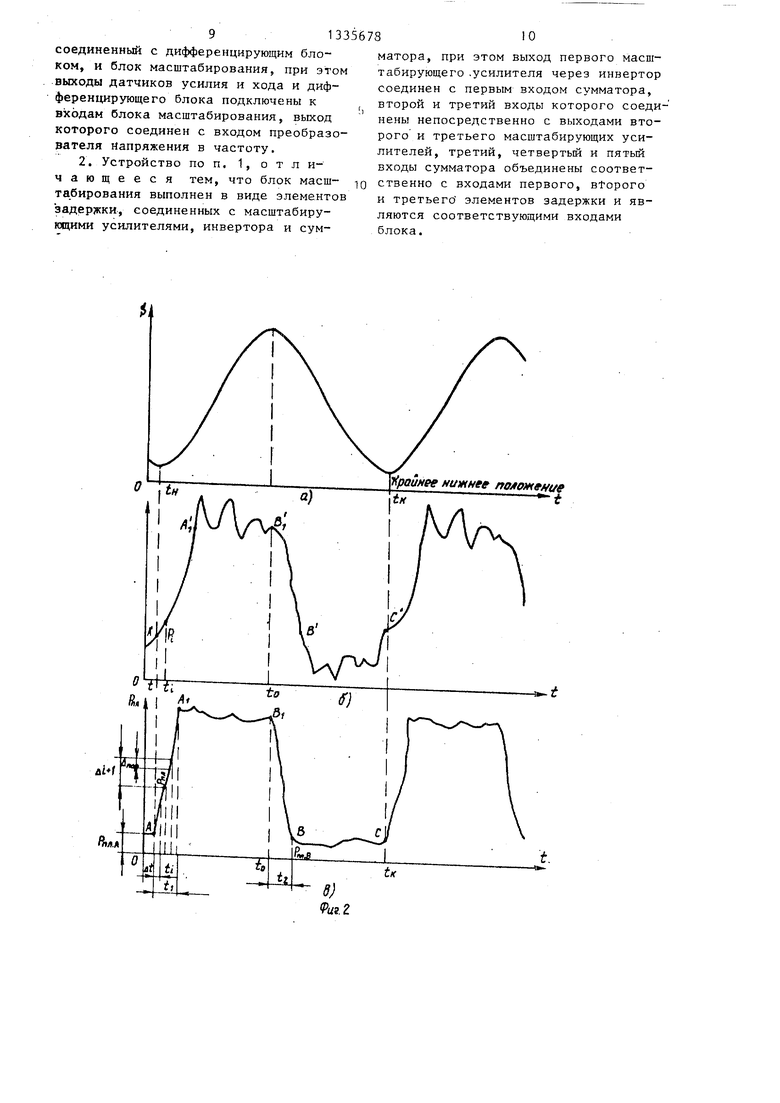
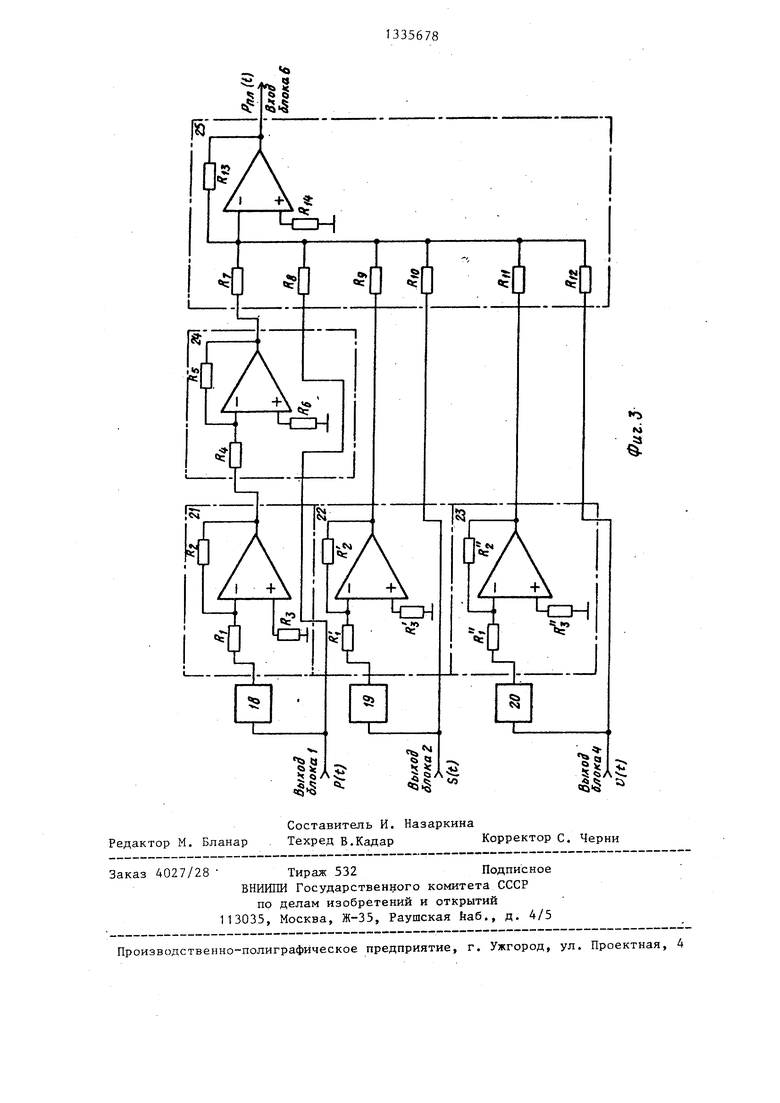
На фиг. 1 изображена функциональная схема устройства; на фиг, 2 - временная диаграмма работы устройства; на фиг, 3 - функциональная схема
блока масштабирования.
Устройство содержит датчики усилия 1 и хода 2, генератор 3 тактовых импульсов, .дифференцирующий блок 4, блок 5 масштабирования, преобразователь 6 напряжения в частоту, при этом выходы датчиков усилия 1, хода 2 и дифференцирующего блока 4, связанного своим выходом с входом датчика 2 хода, подключены к трем входам блока 5 масштабирования, выход которого подключен через преобразователь 6 в частоту к первому входу счетчика 7 импульсов, выход которого соединен с входом блока 8 памяти, а выход генератора 3 тактовых импульсов подключен к входу блока 9 управления, первьш выход которого подключен к входу блока 8 памяти, второй к входу счетчика 7 импульсов. Выход последнего подключен к первым входам блока 10 приращения и элемента 11 сравнения, а два выхода блока 8 памяти подключены соответственно к двум другим входам блока 10 приращения и элемента 11 сравнения. Выход блока 10 приращения и выход элемента 11 сравнения подключены соответственно к первому и второму входам блока 9 управления, третий выход которого связан с входом блока- 10 приращения. Выход генератор 3 тактовых импульсов подключен также к первым входам счетчиков 12-14 импульсов, вторые входы которых связаны с тремя выходами,блока 9 управления. Выходы счетчиков 12 и 13 соединены с двумя входами делителя 15, выход ко- .торого подключен к входу блока 16 сравнения, другой вход которого связан с выходЬм блока 8 памяти, а вы
ход - с третьим входом блока управления 9, а выход счетчика 14 импульсов связан с входом блока 17 индикации.
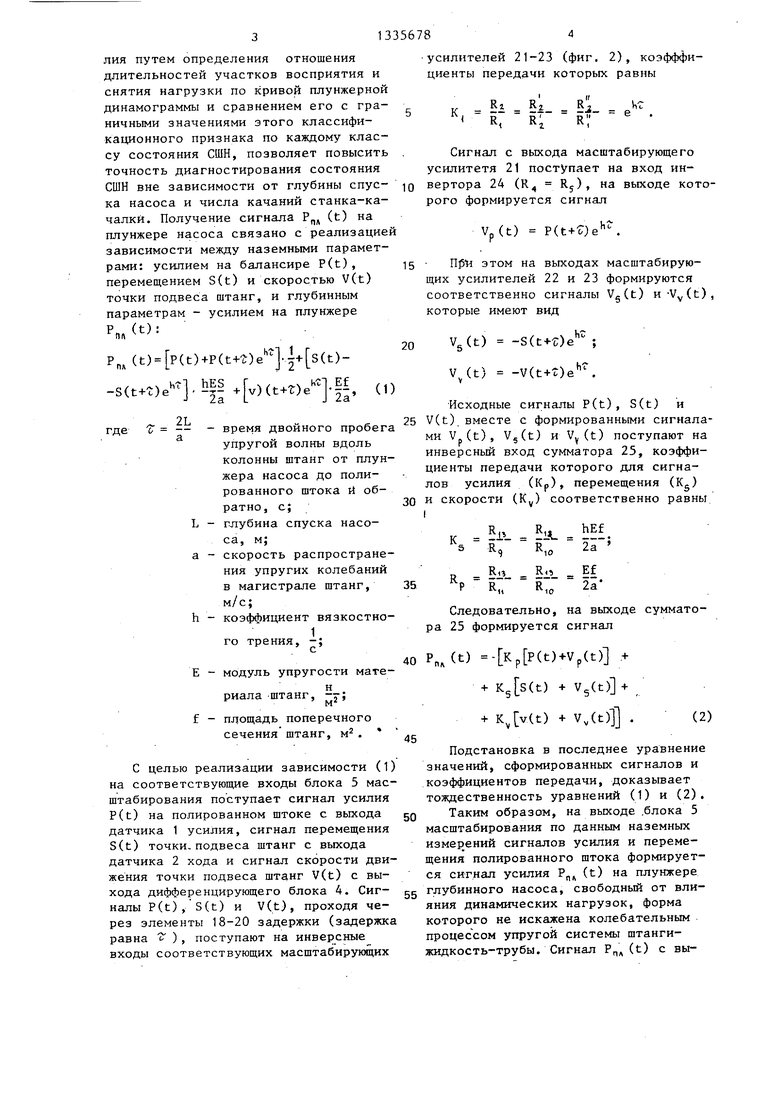
На фиг. 2 приняты следующие обозначения: S - перемещение точки подвеса штанг, Р - усилие на полированном штоке, РПД - усилие на плунжере насоса, t - время, , t - момент начала хода штанг вверх, t - момент начала хода штанг вниз, t, - момент окончания периода качания, Р. и Р ,1 ПЛ.1
соответственно значения сигналов усилия на полированном штоке и на плунжере насоса в i-й момент времени
и
Ч длительности участков восприятия и снятия нагрузки, ut - шаг квантования при измерении сигналов
усилия, Р... . и Р
пл в
- усилие на плунжере насоса соответственно з начале участка восприятия и в конце участка снятия нагрузки; ь1 - приращение усилия на плунжене на i-м интервале квантования, л „,,- - пороговое значение приращения усилия на плунжере на интервале квантования.
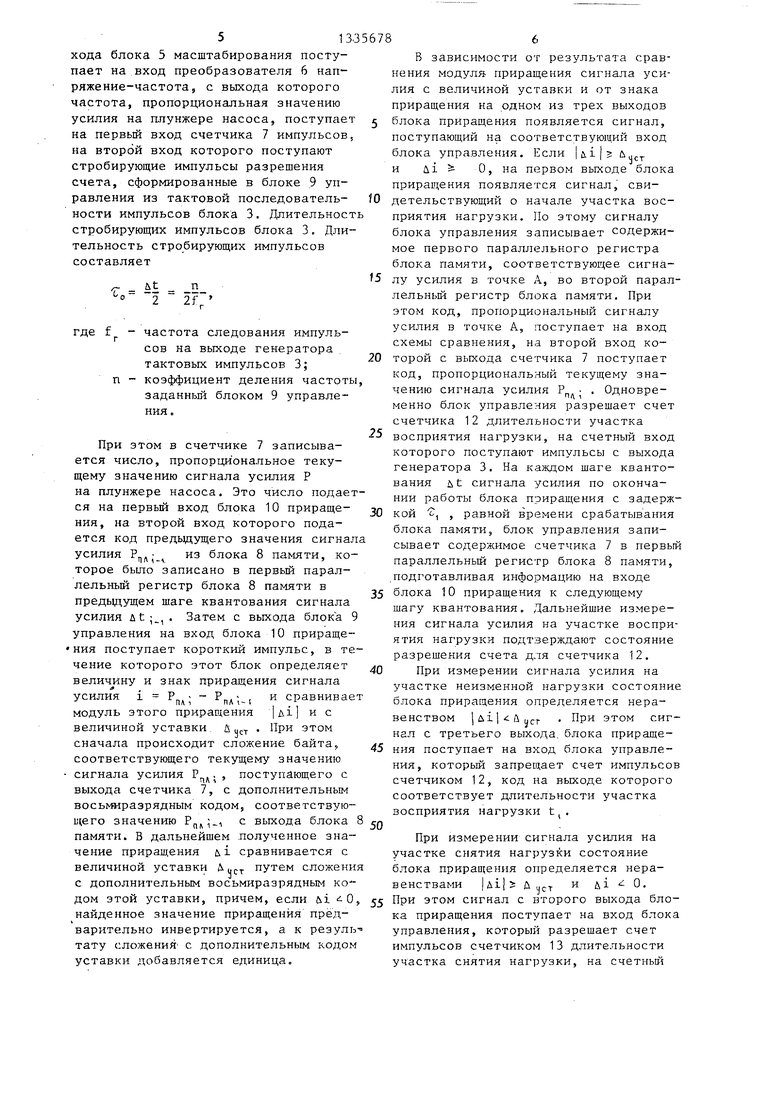
Блок масштабирования (фиг, 3) содержит элементв 18-20 задержки, входы которых соединены соответственно с выходами датчиков усилия 1 и хода 2 с дифференцирующего блока 4, а выходы их соответственно подключены к входам масштабирующих усилителей 21-23, При этом выход масштабирующего усилителя 21 соединен с входом инвертора 24, выход которого вместе с выходами масштабирующих усилитетей 22 и 23, а также входами элементов 18-20 задержки подключены к входу сумматора 25, выход которого соединен с входом преобразователя 6 напряжения в частоту.
Устройство работает следующим образом.
Сигналы с выходов датчиков усилия 1 и хода 2, а также с выхода дифференцирующего блока 4, выход которого связан с выходом датчика 2 хода, поступают на вход блока 5 масштабирования, с выхода которого сигнал Р„ (t) поступает на вход преобразователя 6 напряжения в частоту. Сигнал Р (t) соответствует усилию на плунжере глубинного насоса. Значения (t) усилия на плунжере глубинного насоса не зависит от искажающего влияния упругих колебаний системы штанги-жидкость-трубы. Следовательно, осуществление анализа сигналов с датчика уси
усилителей 21-23 (фиг. 2), коэфффи- циенты передачи которых равны
К
ЦТ
R,
R1
R ;
ЛИЯ путем определения отношения длительностей участков восприятия и снятия нагрузки по кривой плунжерной динамограммы и сравнением его с граничными значениями этого классифи- кационного признака по каждому классу состояния СШН, позволяет повысить точность диагностирования состояния
СШН вне зависимости от глубины спус- Q вертора 24 (R Rj), на выходе кото- ка насоса и числа качаний станка-качалки. Получение сигнала Р„ (t) на плунжере насоса связано с реализацией зависимости между наземными параметрами: усилием на балансире P(t), 15 перемещением S(t) и скоростью V(t) точки подвеса штанг, и глубинным параметрам - усилием на плунжере Pn.t):
Сигнал с выхода масштабирующего усилитетя 21 поступает на вход ин1 RJ), Не
рого формируется сигнал
Vp(t)
P(t + c:)e
htr
этом на выходах масштабирующих усилителей 22 и 23 формируются соответственно сигналы Vg(t) иVy(t), которые имеют вид
V,(t)
hc
-S(t4-)e V ft) -V(t+t)e .
Р„ (t) p(t)+P(t+t)e.(t)- -S(t+t)e .b|| v)(t+t), (1)
де
2L a
L a h время двойного пробега упругой волны вдоль колонны штанг от плунжера насоса до полированного штока и обратно, с;
глубина спуска насоса, м;
скорость распространения упругих колебаний в магистрале штанг, м/с; коэффициент вязкостно1го трения, -;
модуль упругости матенриала штанг, -;
площадь поперечного сечения штанг, м.
С целью реализации зависимости (1) на соответствующие входы блока 5 масштабирования поступает сигнал усилия P(t) на полированном штоке с выхода датчика 1 усилия, сигнал перемещения S(t) точки, подвеса штанг с выхода датчика 2 хода и сигнал скорости движения точки подвеса штанг V(t) с выхода дифференцирующего блока 4. Сигналы P(t), S(t) и V(t), проходя через элементы 18-20 задержки (задержка равна 2 ) , поступают на инверсные входы соответствующих масштабирующих
усилителей 21-23 (фиг. 2), коэфффи- циенты передачи которых равны
ЦТ
R,
R1
R ;
вертора 24 (R Rj), на выходе кот
Сигнал с выхода масштабирующего усилитетя 21 поступает на вход ин1 RJ), Не
рого формируется сигнал
24 (R Rj), на
Vp(t)
P(t + c:)e
htr
вертора 24 (R Rj), на выходе кото-
этом на выходах масштабирующих усилителей 22 и 23 формируются соответственно сигналы Vg(t) иVy(t), которые имеют вид
вертора 24 (R Rj),
V,(t)
hc
-S(t4-)e V ft) -V(t+t)e .
Исходные сигналы P(t), S(t) и 25 V(t), вместе с формированнь ми сигналами Vp(t), ) и Vy(t) поступают на инверсный вход сумматора 25, коэффициенты передачи которого для сигналов усилия (Кр), перемещения (Kg) 30 и скорости (К..) соответственно равны
К
5
ь
R, о -
р R:
1
R,o
RI
R7o
hEf 2Г
Ef 2a
Следовательно, на выходе сумматора 25 формируется сигнал
Pn.(t) (t)V.(t)
+ К.
Ts(t)
K,v(t)
Р
+ V5(t)H
v,(t)
(2)
45
0
Подстановка в последнее уравнение значений, сформированных сигналов и коэффициентов передачи, доказывает тождественность уравнений (1) и (2), Таким образом, на выходе .блока 5 масштабирования по данным наземных измер ений сигналов усилия и перемещения полированного штока формируется сигнал усилия Р„ (t) на плунжере 5 глубинного насоса, свободный от влияния динамических нагрузок, форма которого не искажена колебательным процессом упругой системы штанги- жидкость-трубы. Сигнал РПЛ (t) с вы5133
хода блока 5 масштабирования поступает на вход преобразователя 6 напряжение-частота, с выхода которого частота, пропорциональная значению усилия на плунжере насоса, поступает на первый вход счетчика 7 импульсов, на второй вход которого поступают стробирующие импульсы разрешения счета, сформированные в блоке 9 управления из тактовой последователь- ности импульсов блока 3. Длительност стробирующих импульсов блока 3, Длительность стробирующих импульсов составляет
c п
Ьл
it
-о- 2
п 2f
20
35
40
где f - частота следования импульсов на выходе генератора тактовых импульсов 3; п - коэффициент деления частоты, заданньш блоком 9 управления,
25
При этом в счетчике 7 записывается число, пропорциональное текущему значению сигнала усилия Р на плунжере насоса. Это число подается на первый вход блока 10 прираще- ния, на второй вход которого подается код предьщущего значения сигнала усилия Р„д;, из блока 8 памяти, которое было записано в первый парал- лельньй регистр блока 8 памяти в предыдущем шаге квантования сигнала усилия At;,. Затем с выхода блока 9 управления на вход блока 10 приращения поступает короткий импульс, в течение которого этот блок определяет величину и знак приращения сигнала усилия i Pj - - Р„д;, и сравнивает модуль этого приращения Ai и с величиной уставки, а цст этом сначала происходит сложение байта, соответствующего текущему значению
сигнала усилия Р, , поступающего с выхода счетчика 7, с дополнительным восьмиразрядным кодом, соответствующего значению РПЛ,-: с выхода блока 8 Q памяти. В дальнейшем .полученное значение приращения i сравнивается с величиной уставки Дцс путем сложения с дополнительным восьмиразрядным кодом этой уставки, причем, если &1 , 55 найденное значение приращения предварительно инвертируется, а к резуль тату сложения с дополнительным кодом уставки добавляется единица.
В зависимости от результата сравнения модуля приращения сигнала усилия с величиной уставки и от знака приращения на одном из трех выходов блока приращения появляется сигнал, поступающий на соответствующий вход
Ч
блока управления. Если |u.i с, и л1 5: О, на первом выходе блока приращения появляется сигнал, свидетельствующий о начале участка восприятия нагрузки. По этому сигналу блока управления записывает содержимое первого параллельного регистра блока памяти, соответствующее сигналу усилия в точке А, во второй параллельный регистр блока памяти. При этом код, пропорциональный сигналу усилия в точке А, поступает на вход схемы сравнения, на второй вход которой с выхода счетчика 7 поступает код, пропорциональный текущему значению сигнала усилия Р . Одновременно блок управления разрешает счет счетчика 12 длительности участка восприятия нагрузки, на счетный вход которого поступают импульсы с выхода генератора 3. На каждом шаге квантования t сигнала усилия по окончании работы блока приращения с задержкой
равной времени срабатывания
блока памяти, блок управления записывает содержимое счетчика 7 в первый параллельный регистр блока 8 памяти, подготавливая информацию на входе блока 10 приращения к следующему шагу квантования. Дальнейшие измерения сигнала усилия на участке восприятия нагрузки подтверждают состояние разрешения счета для счетчика 12.
При измерении сигнала усилия на участке неизменной нагрузки состояние блока приращения определяется неравенством juil iuucr . При этом сигнал с третьего выхода, блока приращения поступает на вход блока управления, который запрещает счет импульсов счетчиком 12, код на выходе которого соответствует длительности участка восприятия нагрузки t.
При измерении сигнала усилия на участке снятия нагрузки состояние блока приращения определяется неравенствами IAIJS Диет Д1 0. При этом сигнал с второго выхода блока приращения поступает на вход блока управления, который разрешает счет импульсов счетчиком 13 длительности участка снятия нагрузки, на счетный
вход которого поступают импульсы с генератора 3 тактовых импульсов.
В момент окончания участка снятия нагрузки очередное текущее значение
сигнала усилия Р
пл в
поступающее с
выхода счетчика 7 на вход элемента 11 сравнения, сравнивается со значением сигнала усилия в точке А (), которое предварительно записано во втором параллельном регистре блока 8 памяти. При этом с выхода элемента 11 сравнения на вход блока 9 управления поступает сигнал окончания импульса
периодов восприятия и снятия нагр ки по кривой усилия на плунжере н соса, предварительно восстановлен по сигналам усилия на полированном штоке и перемещения точки подвеса штанг, поступающим с соответствующ датчиков, установленных на баланси станка-качалки. Восстановленная та образом, кривая усилия на полирова ном штоке практически не искажена влиянием колебательного процесса упругой системы штанги-жидкость-тр бы, так как усилие на плунжере не
сигнала усилия. Так как сигнал начала 15 зависГИт от динамических нагрузок.
участка снятия нагрузки получен блоком управления с задержкой, равной шагу квантования ut, при получении сигнала с выхода элемента J1 сравнения блоком управления вырабатывается управляющий сигнал с задержкой Т2 t который запрещает счет импульсов счетчиком 13. .При этом содержимое счетчика 13 соответствует длительности участка снятия нагрузки t..
Значения величин t, и t поступаю с выходов счетчика 12 и 13 на входы делителя 15, который по сигналу с блока управления определяет отношение , характеризующее одно из шести классов состояния СШН: нормальная работу, утечка в приемном или нагнетательном клапане, высокая или низкая посадка плунжера и незаполне- нйе насоса. Значение величины поступает на вход блока 16 сравнения на второй вход которого с выхода блока памяти последовательно поступают граничные значения N,.- величины t ,/t для каждого класса состояния СШН. Синхронно с импульсами, управляющими работой блока памяти. На вход счетчика 14 номера класса состояния СШН поступают импульсы с генератора 3, Если N , элементом 16 сравнения в блок управления подают сигнал о показании найденного значения величины t внутрь диапазона возможных значений этой величины для данного класса состояний. При этом блок управления запрещает счет счетчиком 14 импульсов, с выхода которого код номера класса состояния СШН поступает на вход блока 17 индикации, сиг
нализующего о соответствующем состо- 55 входу блока управления, о т л янии штангового глубинного насоса.
Следовательно, предлагаемое устройство осуществляет анализ состояния СШН путем определения Отношения .
ю щ е е с я тем, что, с делью шения точности диагностировани тояния скважинных штанговых на в устройство введены датчик хо
периодов восприятия и снятия нагрузки по кривой усилия на плунжере насоса, предварительно восстановленной, по сигналам усилия на полированном штоке и перемещения точки подвеса штанг, поступающим с соответствующих датчиков, установленных на балансире станка-качалки. Восстановленная таким образом, кривая усилия на полированном штоке практически не искажена влиянием колебательного процесса упругой системы штанги-жидкость-трубы, так как усилие на плунжере не
зависГИт от динамических нагрузок.
0 5
о Q
5
0
5
возникающих в штангах при их упругих деформациях. Это позволяет повысить точность определения периодов восприятия и снятия нагрузки по сравнению с известным устройством.
Формула изобретения
1. Устройство диагностирования скважинных штанговых насосов, содержащее датчик усилия, преобразователь напряжения в частоту, выход которого подключен к первому входу первого счетчика, генератор тактовых импульсов, соединенный со счетным входом блока управления и первыми входами второго, третьего и четвертого счетчиков, выход первого счетчика соединен с первыми входами блока памяти, первого блока сравнения и блока приращения, выход которого подключен к первому входу блока управления, выходы блока памяти соединены соответственно с первым входом второго блока сравнения и вторыми входами блока приращения и первого блока сравнения, выход которого соединен с вторым входом блока управления, выходы которого подключены соответственно к второму входу блока памяти, второму входу первого счетчика, третьему входу блока приращения, вторым входам третьего, четвертого и пятого счетчи- ков и управляющему входу делителя частоты, первый и второй входы которого соединены с выхода ми второго и третьего счетчиков, и вькод - с вторым входом второго блока сравнения, выход которого подключен к тр етьему
входу блока управления, о т л
и ч аю щ е е с я тем, что, с делью повышения точности диагностирования состояния скважинных штанговых насосов, в устройство введены датчик хода.
91335
соединенный с дифференцирующим блоком, и блок масштабирования, при этом .выходы датчиков усилия и хода и дифференцирующего блока подключены к входам блока масштабирования, выход которого соединен с входом преобразователя Напряжения в частоту.
2. Устройство по п, 1, отличающееся тем, что блок масш- табирования выполнен в виде элементов задержки, соединенных с масштабирующими усилителями, инвертора и сум10
матора, при этом выход первого масштабирующего .усилителя через инвертор соединен с первым входом сумматора, второй и третий входы которого соединены непосредственно с выходами второго и третьего масштабирующих усилителей, третий, четвертый и пятьй входы сумматора объединены соответственно с входами первого, второго и третьего элементов задержки и являются соответствующими входами блока.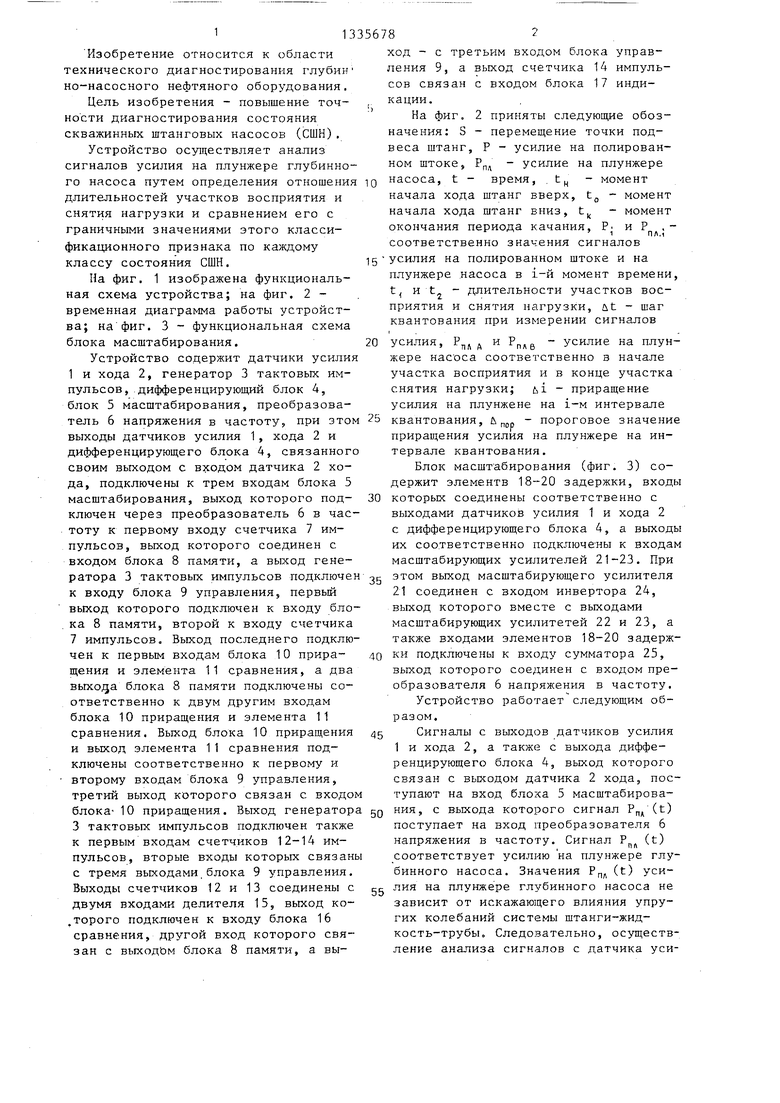
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство диагностирования скважинных штанговых насосов | 1988 |
|
SU1560799A1 |
| СИСТЕМА ТЕЛЕДИНАМОМЕТРИРОВАНИЯ ГЛУБИННЫХ ШТАНГОВЫХ НАСОСОВ | 1999 |
|
RU2160385C1 |
| Устройство диагностирования скважинных штанговых насосов | 1984 |
|
SU1245753A1 |
| Устройство для диагностированияСКВАжиННыХ шТАНгОВыХ HACOCOB | 1979 |
|
SU823636A1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ШТАНГОВЫХ НАСОСНЫХ УСТАНОВОК | 2009 |
|
RU2400647C1 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИРОВАНИЯ СОСТОЯНИЯ СКВАЖИННОГО ГЛУБИННОНАСОСНОГО ОБОРУДОВАНИЯ | 1999 |
|
RU2168653C2 |
| Устройство для контроля глубиннонасосных скважин | 1988 |
|
SU1594567A1 |
| Устройство для автоматического кон-ТРОля СОСТОяНия глубиННОНАСОСНОгООбОРудОВАНия | 1979 |
|
SU836343A1 |
| Устройство для обработки телединамограмм глубинно-насосных скважин | 1986 |
|
SU1416752A2 |
| Устройство для автоматического диагностирования состояния скважинной штанговой насосной установки | 1980 |
|
SU1048167A1 |
Изобретение относится к оборудованию технического диагностирования состояния глубины насосного нефтяного оборудования. Цель изобретения - повышение точности диагностирования состояния скважинных штанговых насосов. Устр-во содержит датчики усилителя 1 и хода 2, генератор тактовых импульсов 3, дифференцирующий блок 4, блок 5 масштабирования, преобразователь 6 напряжения в частоту, счетчики 7, 12-14 импульсов, блоки памяти 8, управления 9 и приращения 10, элементы 11 и 16 сравнения, делитель 15 и блок индикации 17. Устройство осуществляет анализ состояния штанговых насосов путем определения отношения периодов восприятия и снятия нагрузки по кривой усилия на плунжере насоса. Ее предварительно восстанавливают по сигналам усилия на полированном штоке и перемещения точки подвеса штанг, поступающим с датчиков 1 и 2. Восстановленная кривая практически не искажена влиянием колебательного процесса упругой системы штанги-жидкость-трубы. 1 з.п. ф-лы, 3 ил. i (Л СО 00 СП О5 VI СХ)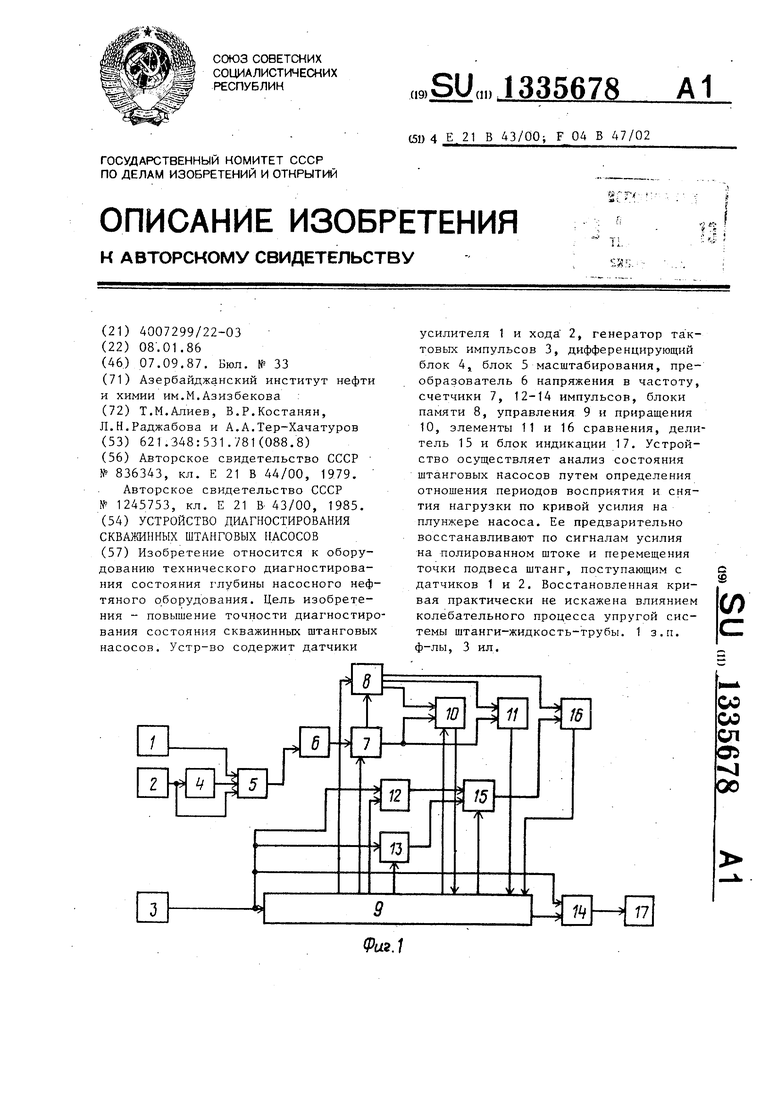
Редактор М. Бланар
Составитель И. Назаркина
Техред В.КадарКорректор С. Черни
Заказ 4027/28 Тираж 532Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская Ьаб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Устройство для автоматического кон-ТРОля СОСТОяНия глубиННОНАСОСНОгООбОРудОВАНия | 1979 |
|
SU836343A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
