Изобретение относится к электротехнике и предназначено для использования в электроприводах различных механизмов, исполнительных устройствах автоматических систем и др.
Известны электрические приводы с индукторными двигателями, содержащие m-фазную индукторную электрическую машину с датчиком положения ротора и m датчиками фазных токов, силовой транзисторный коммутатор, к выходам которого подключены обмотки индукторной машины, а вход соединен с выходом контроллера, входы которого подключены к выходам релейного регулятора фазных токов, регулятора скорости и датчика положения ротора, выход регулятора скорости соединен с суммирующим входом релейного регулятора тока, суммирующий вход подключен к задатчику скорости, а вычитающий вход через датчик скорости соединен с датчиком положения ротора (Патент РФ №2182743, МПК H02P 6/18, Н02К 29/06; DiRenzo M. Switched Reluctance Motor Control - Basic Operation and Example Using the TMS320F240. - Texas Instruments. Application Report SPRA420A, 2000. - 32 p., Fig.13).
Такие известные электрические приводы реализованы по классическому принципу подчиненного регулирования координат с внутренним подчиненным контуром регулирования тока. Однако известно, что в индукторных двигателях вращающий момент связан нелинейной зависимостью с фазными токами и положением ротора. Это служит причиной изменений параметров системы и, следовательно, показателей качества при вариациях нагрузок и управляющих воздействий. При этом вращающий момент двигателя имеет переменную составляющую, вызывающую дополнительные вибрации и шум при работе.
Следовательно, недостатками известных электроприводов с индукторными двигателями являются невысокие показатели качества регулирования, вибрации и излучение звуковых волн при работе.
Из известных технических решений наиболее близким по достигаемому результату к предлагаемому изобретению является электрический привод с индукторным двигателем, содержащий m-фазную индукторную электрическую машину с датчиком положения ротора и m датчиками фазных токов, силовой транзисторный коммутатор, к выходам которого подключены обмотки индукторной машины, а вход соединен с выходом контроллера, входы которого подключены к выходам релейного регулятора, регулятора скорости и датчика положения ротора, выход регулятора скорости соединен с суммирующим входом релейного регулятора тока, суммирующий вход регулятора скорости подключен к задатчику скорости, а вычитающий вход через датчик скорости соединен с датчиком положения ротора, вычитающие входы релейного регулятора тока подключены через m-канальный апериодический фильтр к выходам датчиков тока (Blaabjerg F., Kjaer P., Rasmussen P., Cossar C. Improved Digital Current Control Methods in Switched Reluctance Motor Drives. - IEEE Transactions on Power Electronics, 1999, vol.14, №.3 - P.563-572, Fig.1-2).
Такой известный электропривод с индукторным двигателем реализован по классическому принципу подчиненного регулирования координат с внутренним подчиненным контуром регулирования тока. Однако известно, что в индукторных двигателях вращающий момент связан нелинейной зависимостью с фазными токами и положением ротора. Это служит причиной изменений параметров системы и, следовательно, показателей качества при вариациях нагрузок и управляющих воздействий. При этом вращающий момент двигателя имеет переменную составляющую, вызывающую дополнительные вибрации и шум при работе.
Следовательно, недостатками известных электроприводов с индукторными двигателями являются невысокие показатели качества регулирования, вибрации и излучение звуковых волн при работе.
Целью предлагаемого изобретения является повышение качества регулирования скорости, снижение пульсаций момента, вибраций, излучения звуковых волн при работе.
Поставленная цель достигается тем, что в известный электропривод с индукторным двигателем, содержащий m-фазную индукторную электрическую машину с датчиком положения ротора и m датчиками фазных токов, силовой транзисторный коммутатор, к выходам которого подключены обмотки индукторной машины, а вход соединен с выходом контроллера, входы которого подключены к выходам релейного регулятора, регулятора скорости и датчика положения ротора, выход регулятора скорости соединен с суммирующим входом релейного регулятора тока, суммирующий вход регулятора скорости подключен к задатчику скорости, а вычитающий вход через датчик скорости соединен с датчиком положения ротора, вычитающие входы релейного регулятора тока подключены через m-канальный апериодический фильтр к выходам датчиков тока, дополнительно введен регулятор постоянной времени m-канального апериодического фильтра, который в свою очередь выполнен регулируемым, при этом его управляющий вход через регулятор постоянной времени соединен с выходом датчика скорости.
По сравнению с наиболее близким аналогичным техническим решением предлагаемое устройство имеет следующие новые признаки:
- дополнительно введен регулятор постоянной времени m-канального апериодического фильтра;
- апериодический фильтр выполнен регулируемым, при этом его управляющий вход через регулятор постоянной времени соединен с выходом датчика скорости.
Следовательно, заявляемое техническое решение соответствует требованию «новизна».
При реализации предлагаемого изобретения обеспечивается стабилизация показателей качества регулирования во всем диапазоне изменений нагрузок и управляющих воздействий, снижаются пульсации момента, вибрации и излучение звуковых волн при работе. Этот эффект обусловлен тем, что в системе с подчиненным регулированием координат внутренний подчиненный контур организован на основе обратной связи по току, величина которой зависит от времени и, следовательно, положения ротора. В момент включения тока в обмотке соответствующей фазы сигнал обратной связи минимален, и индуктивность фазы также минимальна. В результате этого ток принимает максимальное значение, при этом момент принимает максимально возможное значение. При повороте ротора происходит увеличение индуктивности и обратной связи по току. При этом ток уменьшается, а момент практически поддерживается постоянным. В результате этого происходит стабилизация момента и, следовательно, снижение пульсаций момента, вибраций и звукового излучения при работе.
Следовательно, заявляемое техническое решение соответствует требованию «положительный эффект».
По каждому отличительному признаку проведен поиск известных технических решений в области электротехники, автоматики и электропривода. Электроприводы с индукторными двигателями, содержащие регулятор постоянной времени m-канального апериодического фильтра, который в свою очередь выполнен регулируемым, при этом его управляющий вход через регулятор постоянной времени соединен с выходом датчика скорости, в известных технических решениях аналогичного назначения не обнаружены.
Таким образом, указанные признаки обеспечивают заявляемому техническому решению соответствие требованию «существенные отличия».
Сущность предлагаемого изобретения поясняется чертежами. На фиг.1 показана функциональная схема электропривода с индукторным двигателем, на фиг.2 показаны диаграммы процессов в приводе на одном шаге коммутации (на фиг.2а показаны графики процессов в электроприводе с индукторным двигателем известной структуры, на фиг.2б показаны процессы в предлагаемом электрическом приводе), на фиг.3 и фиг.4 показаны графики процессов в электрическом приводе при изменении задающего сигнала и момента нагрузки (на фиг.3 показаны графики процессов в предлагаемой системе, на фиг.4 показаны графики процессов в электроприводе с индукторным двигателем известной структуры).
Электропривод с индукторным двигателем, функциональная схема которого показана на фиг.1, содержит задатчик скорости 1, регулятор скорости 2, датчик скорости 3, релейный регулятор тока 4, регулятор 5 постоянных времени m-канального апериодического фильтра, контроллер 6, m-канальный апериодический фильтр 7, силовой транзисторный коммутатор 8, m датчиков фазных токов 9, m-фазную индукторную электрическую машину 10, датчик положения ротора 11. Обмотки m-фазной индукторной электрической машины 10 с датчиком положения ротора 11 и m датчиками фазных токов 9 (9.1,…9.m) подключены к выходам силового транзисторного коммутатора 8, вход которого соединен с выходом контроллера 6, входы которого подключены к выходам релейного регулятора 4, регулятора скорости 2 и датчика положения ротора 11, выход регулятора скорости 2 соединен с суммирующим входом релейного регулятора фазных токов 4, суммирующий вход подключен к задатчику скорости 1, а вычитающий вход через датчик скорости 3 соединен с датчиком положения ротора 10, m входов m-канального апериодического фильтра 7 подключены к выходам m датчиков фазных токов 9, а m выходов подключены к m вычитающим входам релейного регулятора тока 4, вход регулятора постоянных времени m-канального апериодического фильтра подключен к выходу датчика скорости, а выход соединен с управляющими входом m-канального апериодического фильтра 7.
Электропривод с индукторным двигателем работает следующим образом. Обмотки индукторной машины 10 подключены к выходу транзисторного коммутатора 8. Регулирование скорости Ω двигателя осуществляется изменением напряжения на обмотках двигателя. Для измерения положения ротора используется датчик положения ротора 11. Скорость двигателя 10 измеряется датчиком скорости 3, например микроконтроллерным вычислительным устройством, преобразующим выходной сигнал датчика положения ротора в сигнал, пропорциональный скорости. Токи в обмотках двигателя 10 измеряются с помощью датчиков фазных токов 9, например шунтов.
На суммирующий вход регулятора скорости 2 с выхода задатчика скорости 1 поступает сигнал u1, пропорциональный требуемому значению угловой скорости двигателя 10. На вычитающий вход регулятора скорости 2 поступает выходной сигнал u3 датчика скорости 3, пропорциональный угловой скорости Ω вращения ротора двигателя 10. В регуляторе скорости 2 производится вычисление ошибки регулирования ε=u1-u3 и преобразование полученного сигнала в соответствии с реализованным в устройстве законом регулирования, например пропорционально-интегральным. Сигнал 8 с выхода регулятора скорости 2 поступает на первый вход релейного регулятора тока 4 и один из входов контроллера 6.
На m входах m-канального апериодического фильтра 7 действуют выходные сигналы датчиков фазных токов 9. В каждом канале апериодического фильтра происходит сглаживание сигнала, пропорционального току соответствующего датчика, состоящее в подавлении высокочастотной составляющей. Это означает, что фильтры осуществляют задержку сигналов, пропорциональных токам. Постоянная времени апериодических фильтров регулируется обратно пропорционально скорости, т.е. при увеличении скорости постоянные времени фильтра уменьшаются, при этом уменьшаются соответствующие задержки.
Релейный регулятор тока 4 выполняет сравнение сигнала, поступающего с выхода регулятора скорости 2, с выходными сигналами m-канального апериодического фильтра 7 и формирование сигналов коммутации ключей транзисторного коммутатора 8 для соответствующей фазы. Последовательность коммутации ключей во времени задается выходным сигналом датчика положения ротора 11 и полярностью выходного сигнала регулятора скорости 2, определяющей направление вращения двигателя 10. Так как на вычитающие входы релейного регулятора 4 поступают сигналы с выхода m-канального апериодического фильтра 7, пропорциональные отфильтрованным токам, то, следовательно, релейный регулятор выполняет функцию регулятора тока. В системе с подчиненным регулированием координат внутренний подчиненный контур организован на основе обратной связи по току, величина которой зависит от времени и, следовательно, положения ротора.
В момент включения тока в обмотке соответствующей фазы сигнал обратной связи минимален, и индуктивность фазы также минимальна. В результате этого ток принимает максимальное значение, при этом момент принимает максимально возможное значение. При повороте ротора происходит увеличение индуктивности, производной от индуктивности по углу поворота и обратной связи по току. При этом ток уменьшается, а момент практически поддерживается постоянным. В результате этого происходит стабилизация момента и, следовательно, снижение пульсаций момента, вибраций и звукового излучения при работе.
На фиг.2а показаны процессы на одном шаге коммутации в предлагаемом электрическом приводе, на фиг.2б показаны графики процессов в электроприводе с индукторным двигателем известной структуры. На фиг.2 обозначено: i - ток в фазной обмотке; iз - заданное значение тока; io.с - сигнал обратной связи по току с выхода апериодического фильтра; M - средний момент, создаваемый током в фазной обмотке.
Таким образом, в предлагаемом электроприводе с индукторным двигателем осуществляется регулирование скорости с помощью двух обратных связей - главной по скорости, которая обеспечивает точное регулирование скорости, и подчиненной по току, обеспечивающей управление током. Благодаря этому обеспечиваются высокие показатели качества регулирования, снижение пульсаций момента, вибраций и звукового излучения при работе.
С целью подтверждения положительного эффекта, достигаемого при использовании предлагаемого технического решения, было выполнено имитационное моделирование электропривода с индукторным двигателем, реализованного по схеме, изображенной на фиг.1. Параметры системы имели следующие значения.
Индукторный двигатель: конструкция 6/4; число фаз - 3; мощность 30 кВт.
Транзисторный коммутатор: напряжение питания U=400 B;
Датчики: коэффициент передачи тахогенератора kΩ=0,1 B·с/рад; коэффициент передачи датчика тока ki=0,1 B/A.
ПИ-регулятор скорости: коэффициент передачи регулятора kpc=4; постоянная времени Tpc=0,4 c.
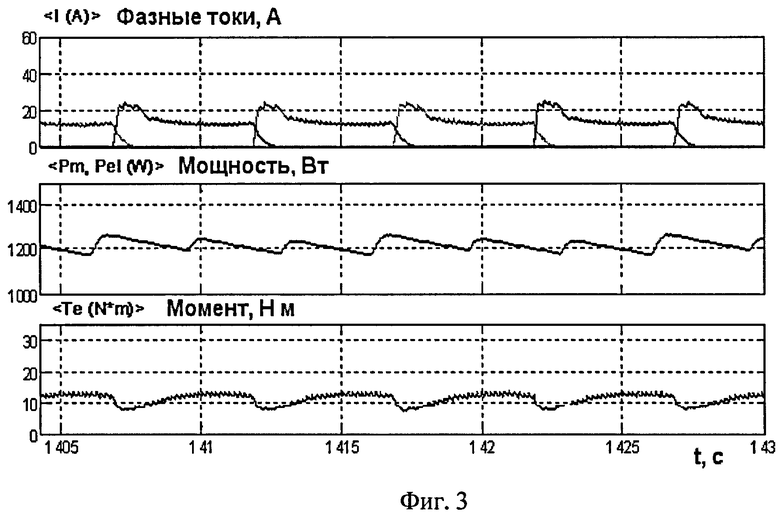
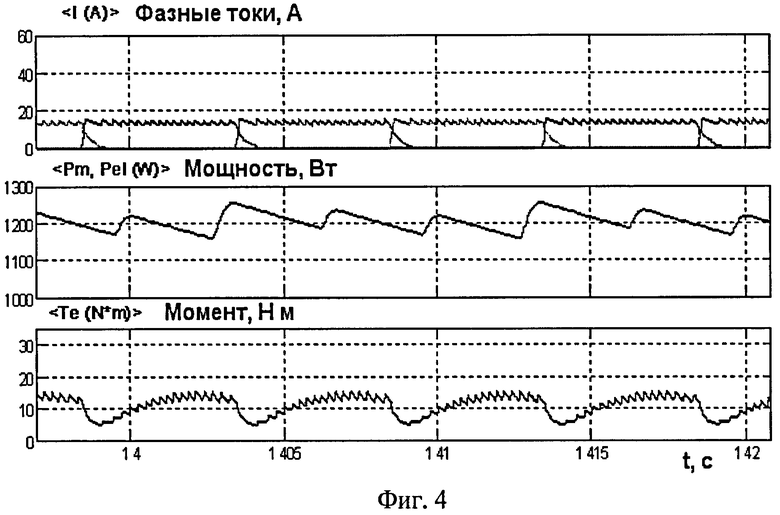
Результаты моделирования приведены на фиг.3 и фиг.4, где показаны процессы для момента, скорости, напряжения и тока в электрическом приводе с индукторным двигателем. На фиг.3 приведены результаты моделирования предлагаемого электрического привода, на фиг.4 показаны процессы в известной системе с традиционным релейным регулятором тока.
Амплитуда пульсаций момента в предлагаемой системе примерно в 2 раза меньше, чем в известной системе за счет введения в цепь обратной связи апериодического фильтра с регулируемой постоянной времени.
Таким образом, использование в известном электрическом приводе с индукторным двигателем, содержащем m-фазную индукторную электрическую машину с датчиком положения ротора и m датчиками фазных токов, силовой транзисторный коммутатор, к выходам которого подключены обмотки индукторной машины, а вход соединен с выходом контроллера, входы которого подключены к выходам релейного регулятора, регулятора скорости и датчика положения ротора, выход регулятора скорости соединен с суммирующим входом релейного релейного регулятора тока, суммирующий вход регулятора скорости подключен к задатчику скорости, а вычитающий вход через датчик скорости соединен с датчиком положения ротора, вычитающие входы релейного регулятора тока подключены через m-канальный апериодический фильтр к выходам датчиков тока, дополнительно регулятора постоянной времени m-канального апериодического фильтра, который в свою очередь выполнен регулируемым, при этом его управляющий вход через регулятор постоянной времени соединен с выходом датчика скорости, обеспечивает повышение качества регулирования скорости, снижение пульсаций момента, вибраций, излучения звуковых волн при работе.
Использование предлагаемого устройства в различных промышленных системах позволит улучшить технические характеристики оборудования, оснащенного электроприводами с индукторными двигателями.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАТРОННАЯ СИСТЕМА | 2009 |
|
RU2404503C1 |
| СИСТЕМА ЭЛЕКТРОПРИВОДА | 1993 |
|
RU2068614C1 |
| МЕХАТРОННАЯ СИСТЕМА | 2006 |
|
RU2324283C1 |
| ЭЛЕКТРОПРИВОД | 2003 |
|
RU2254665C2 |
| ЭКСКАВАТОРНЫЙ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2068615C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВОЗБУЖДЕНИЕМ СИНХРОННОГО ДВИГАТЕЛЯ | 1997 |
|
RU2122277C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ АВТОСАМОСВАЛА | 2021 |
|
RU2757093C1 |
| ДАТЧИК ПОЛОЖЕНИЯ РОТОРА ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ | 2008 |
|
RU2357348C1 |
| ЭЛЕКТРОПРИВОД ПРОКАТНОГО СТАНА | 2013 |
|
RU2523032C1 |
| АВТОМАТИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1992 |
|
RU2065660C1 |
Использование: в области электротехники. Технический результат заключается в повышении качества регулирования скорости, снижении пульсации момента, вибрации и излучения звуковых волн при работе. Электропривод с индукторным двигателем содержит задатчик скорости (1), регулятор скорости (2), датчик скорости (3), релейный регулятор (4), регулятор постоянных времени апериодического фильтра (5), контроллер (6), m-канальный апериодический фильтр (7), силовой транзисторный коммутатор (8), m датчиков фазных токов (9), m-фазную индукторную электрическую машину (10), датчик положения ротора (11). 4 ил.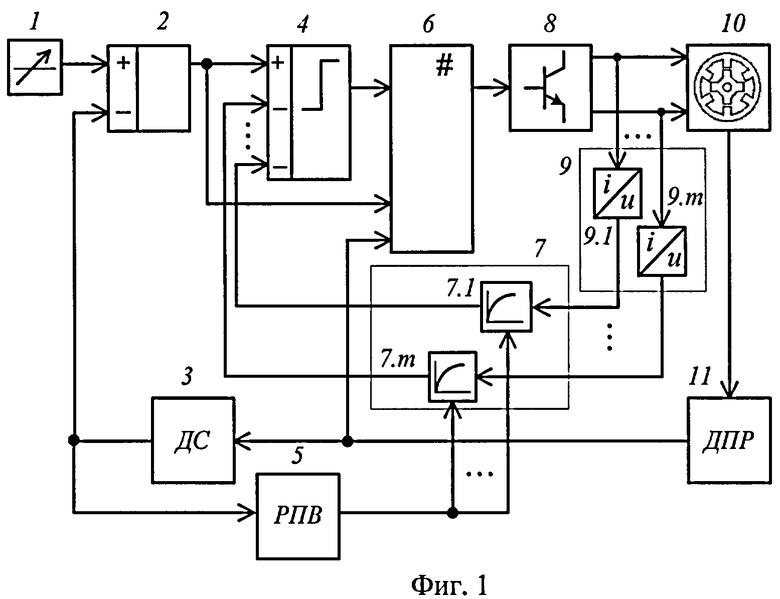
Электропривод с индукторным двигателем, содержащий m-фазную индукторную электрическую машину с датчиком положения ротора и m датчиками фазных токов, силовой транзисторный коммутатор, к выходам которого подключены обмотки индукторной машины, а вход соединен с выходом контроллера, входы которого подключены к выходам релейного регулятора, регулятора скорости и датчика положения ротора, выход регулятора скорости соединен с суммирующим входом релейного регулятора тока, суммирующий вход регулятора скорости подключен к задатчику скорости, а вычитающий вход через датчик скорости соединен с датчиком положения ротора, вычитающие входы релейного регулятора тока подключены через m-канальный апериодический фильтр к выходам датчиков тока, отличающийся тем, что дополнительно введен регулятор постоянной времени m-канального апериодического фильтра, который, в свою очередь, выполнен регулируемым, при этом его управляющий вход через регулятор постоянной времени соединен с выходом датчика скорости.
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНО-ИНДУКТОРНЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2182743C1 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2118039C1 |
| US 4707650 A, 17.11.1987 | |||
| US 4616165 A, 07.10.1986. | |||

