Предлагаемое изобретение относится к автоматике и мехатронике и предназначено для использования в исполнительных устройствах различного назначения.
Известны мехатронные системы, содержащие m-фазный индукторный двигатель, датчик и задатчик скорости, датчик положения ротора, регулятор скорости, блок управления и транзисторный коммутатор, m выходов которого подключены к m фазным обмоткам индукторного двигателя, а управляющий вход соединен с выходом блока управления, вход которого подключен к выходу регулятора скорости, суммирующий и вычитающий входы которого подключены к выходам соответственно задатчика и датчика скорости, а выход датчика положения ротора соединен с входом блока управления (патент РФ №2088040, МПК Н02Р 006/06; Н02Р 008/14; G05В 011/00. Регулятор подачи импульсов тока в фазные обмотки реактивного индукторного двигателя; патент США №4933620, МПК Н02Р 8/00, 1990). Такие мехатронные системы основаны на использовании индукторных двигателей, которые просты в изготовлении, технологичны и дешевы. Они имеют пассивный ферромагнитный ротор без обмоток или магнитов. Однако в таких системах для оценки механической координаты положения ротора используются специальные датчики, которые усложняют конструкции систем и снижают их надежность.
Известны мехатронные системы, содержащие m-фазный индукторный двигатель, датчик и задатчик скорости, датчик напряжения и датчик тока, регулятор скорости, блок управления, транзисторный коммутатор, m выходов которого подключены к m-фазным обмоткам индукторного двигателя, а управляющий вход соединен с выходом блока управления, вход которого подключен к выходу регулятора скорости, суммирующий и вычитающий входы которого подключены к выходам соответственно задатчика и датчика скорости, выходы датчиков положения ротора, тока и напряжения соединены с входами блока управления (Ильинский Н.Ф., Бычков М.Г. Вентильно-индукторный привод для легких электрических транспортных средств./Электротехника, 2000, №2, с.28-31). В такой мехатронной системе реализовано бездатчиковое управление: для оценки механических координат привода (положения, скорости, ускорения) используются специальные цифровые наблюдатели. Это возможно только при высокой производительности центрального процессора, когда система дифференциальных уравнений, описывающих поведение привода, может быть решена в реальном времени. В результате возрастает сложность системы и снижается ее надежность.
Следовательно, недостатки известных технических решений - высокая сложность конструкции и низкая надежность.
Из известных технических решений наиболее близким по достигаемому результату к предлагаемому устройству является мехатронная система, содержащая m-фазный индукторный двигатель, датчик и задатчик скорости, датчик положения ротора, регулятор скорости, блок управления и транзисторный коммутатор, m выходов которого подключены к m-фазным обмоткам индукторного двигателя, а управляющий вход соединен с выходом блока управления, вход которого подключен к выходу регулятора скорости, суммирующий и вычитающий входы которого подключены к выходам соответственно задатчика и датчика скорости, а выход датчика положения ротора соединен с входом блока управления (Кузнецов В.А., Кузьмичев В.А. Вентильно-индукторные двигатели. - М.: Издательство МЭИ, 2003, с.5, рис.1). В известной мехатронной системе для оценки механической координаты положения ротора используется специальный датчик, который предусматривает дополнительное механическое сопряжение, усложняет систему и снижает ее надежность.
Таким образом, недостаток известного технического решения - высокая сложность и низкая надежность.
Цель предлагаемого изобретения - упрощение конструкции и повышение надежности мехатронной системы.
Поставленная цель достигается тем, что в известной мехатронной системе, содержащей m-фазный индукторный двигатель, датчик и задатчик скорости, датчик положения ротора, регулятор скорости, блок управления и транзисторный коммутатор, m выходов которого подключены к m-фазным обмоткам индукторного двигателя, а управляющий вход соединен с выходом блока управления, вход которого подключен к выходу регулятора скорости, суммирующий и вычитающий входы которого подключены к выходам соответственно задатчика и датчика скорости, дополнительно введен логический блок, датчик положения выполнен в виде m/2 при четном m или m при нечетном m индуктивных датчиков приближения, размещенных в пазах статора последовательно между соседними катушками, входы логического блока подключены к выходам датчиков приближения, а выход соединен с входом блока управления.
По сравнению с наиболее близким аналогичным техническим решением предлагаемое устройство имеет следующие новые признаки:
- логический блок;
- датчик положения выполнен в виде m/2 при четном m или m при нечетном m индуктивных датчиков приближения, размещенных в пазах статора последовательно между соседними катушками.
Следовательно, заявляемое техническое решение соответствует требованию «новизна».
При реализации предлагаемого изобретения упрощается конструкция мехатронной системы за счет специального исполнения датчика положения ротора в виде m/2 при четном m или m при нечетном m индуктивных датчиков приближения, размещенных в пазах статора последовательно между соседними катушками и взаимодействующих с ферромагнитным ротором. При этом ротор машины сам выполняет функцию элемента датчика положения, дополнительные устройства и сопряжения отсутствуют.
Следовательно, заявляемое техническое решение соответствует требованию «положительный эффект».
По каждому отличительному признаку проведен поиск известных технических решений в области электротехники, автоматики и электропривода.
Мехатронные системы, у которых датчик положения выполнен в виде m/2 при четном m или m при нечетном m индуктивных датчиков приближения, размещенных в пазах статора последовательно между соседними катушками, в известных технических решениях аналогичного назначения не обнаружены.
Таким образом, указанные признаки обеспечивают заявляемому техническому решению соответствие требованию «существенные отличия».
Сущность предлагаемого изобретения поясняется чертежом, на котором показана функциональная схема мехатронной системы с трехфазным индукторным двигателем (m=3). Устройство содержит датчик скорости 1, задатчик скорости 2, логический блок 3, регулятор скорости 4, блок управления 5, транзисторный коммутатор 6, индукторный двигатель 7 конструкции 6/4 (6 - число полюсов статора 8; 4 - число полюсов ротора 18), содержащий статор 8, обмотки 9...14 на полюсах статора, ферромагнитный ротор 18, m (m=3) индуктивных датчиков приближения 15, 16 и 17.
Мехатронная система работает следующим образом. На выходе задатчика скорости 2 формируется сигнал, пропорциональный заданному значению скорости вращения ротора двигателя 18. Датчик скорости 1 формирует сигнал, пропорциональный текущему значению скорости вращения ротора 18. Регулятор скорости 4 выполняет сравнение выходных сигналов задатчика 2 и датчика 1 скорости, формирование сигнала рассогласования и преобразование этого сигнала в соответствии с принятым законом регулирования. Выходной сигнал регулятора скорости 4 поступает на первый вход блока управления 5, на втором входе которого действует сигнал с выхода логического блока 3. На входах логического блока действуют сигналы с выходов датчиков приближения 15, 16 и 17. Датчики 15, 16 и 17 размещены между соседними катушками статора и формируют сигнал с уровнем логической единицы в случае приближения к датчику полюса ферромагнитного ротора. При указанном расположении датчиков в любом согласованном положении ротора один из них (например, 17) всегда формирует сигнал логической единицы, два других (15 и 16) - сигналы логического нуля. При перемещении ротора в другое согласованное положение в зависимости от направления движения сигнал логической единицы формируется на выходе одного из двух других датчиков (например, 15 при движении по часовой стрелке или 16 при движении против часовой стрелки). Таким образом, выходные сигналы датчиков позволяют однозначно определить положение ротора и направление его вращения.
Логический блок 3 в зависимости от значений выходных сигналов датчиков 15, 16 и 17 формирует сигнал для блока управления 5, осуществляющего преобразование сигнала с выхода регулятора скорости 4 в импульсы управления транзисторным коммутатором 6 в зависимости от положения ротора 18. Транзисторный коммутатор 6 производит коммутацию обмоток индукторной машины в соответствии с сигналами блока управления 5.
Количество датчиков, необходимых для однозначного определения положения и направления вращения ротора, зависит от конструкции индукторной машины. При нечетном числе фаз машины m количество датчиков должно быть равно m, при четном m количество датчиков должно быть m/2. При m=2, т.е. для двухфазной нереверсивной машины, требуется только один датчик.
При использовании индуктивных датчиков приближения, размещенных в пазах статора между соседними обмотками, для определения положения ротора позволяет упростить конструкцию мехатронной системы и повысить ее надежность, т.к. при этом датчик положения реализован не как отдельное устройство, требующее дополнительного присоединения, а интегрирован в конструкцию машины.
Другим важным достоинством предлагаемой мехатронной системы является упрощение технологии изготовления и снижение стоимости.
С целью подтверждения положительного эффекта, достигаемого при использовании предлагаемого технического решения, были проведены экспериментальные исследования мехатронных систем с двухфазным нереверсивным и трехфазным реверсивным индукторными двигателями, реализованными по схеме, изображенной на чертеже. Испытания проводились в условиях лаборатории ОАО «НИПТИЭМ», г.Владимир. В результате испытаний были подтверждены высокие технические характеристики мехатронных систем при упрощенной конструкции датчиков положения.
Таким образом, использование в известной мехатронной системе, содержащей m-фазный индукторный двигатель, датчик и задатчик скорости, датчик положения ротора, регулятор скорости, блок управления и транзисторный коммутатор, m выходов которого подключены к m-фазным обмоткам индукторного двигателя, а управляющий вход соединен с выходом блока управления, вход которого подключен к выходу регулятора скорости, суммирующий и вычитающий входы которого подключены к выходам соответственно задатчика и датчика скорости, дополнительно логического блока и выполнение датчика положения ротора в виде m/2 при четном m или m при нечетном m индуктивных датчиков приближения, размещенных в пазах статора последовательно между соседними катушками, входы логического блока подключены к выходам индуктивных датчиков приближения, а выход соединен с входом блока управления, упрощает конструкцию и повышает ее надежность.
Использование предлагаемого устройства в различных промышленных системах позволит улучшить технические характеристики оборудования, оснащенного мехатронными исполнительными устройствами с индукторными двигателями.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАРТЕР-ГЕНЕРАТОР | 2006 |
|
RU2321765C1 |
| МЕХАТРОННАЯ СИСТЕМА | 2009 |
|
RU2404503C1 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД С ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2400920C1 |
| ИНДУКТОРНЫЙ ДВУХФАЗНЫЙ НЕРЕВЕРСИВНЫЙ ДВИГАТЕЛЬ | 2007 |
|
RU2357346C1 |
| МЕХАТРОННАЯ СИСТЕМА С ШЕСТИФАЗНЫМ ВЕНТИЛЬНО-ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2010 |
|
RU2426211C1 |
| МЕХАТРОННАЯ СИСТЕМА С ЧЕТЫРЕХФАЗНЫМ ВЕНТИЛЬНО-ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2010 |
|
RU2439769C1 |
| ШЕСТИФАЗНЫЙ ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ДВИГАТЕЛЬ, УПРАВЛЯЕМЫЙ ТРЕХФАЗНЫМ ТОКОМ СИНУСОИДАЛЬНОЙ ФОРМЫ | 2012 |
|
RU2494518C1 |
| ШЕСТИФАЗНЫЙ ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ДВИГАТЕЛЬ С КОНЦЕНТРИЧЕСКИМИ ОБМОТКАМИ, УПРАВЛЯЕМЫЙ ТРЕХФАЗНЫМ ТОКОМ СИНУСОИДАЛЬНОЙ ФОРМЫ | 2013 |
|
RU2540957C1 |
| ШЕСТИФАЗНЫЙ ВЫСОКОСКОРОСТНОЙ ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ДВИГАТЕЛЬ С КОНЦЕНТРИЧЕСКИМИ ОБМОТКАМИ, УПРАВЛЯЕМЫЙ ТРЕХФАЗНЫМ ТОКОМ СИНУСОИДАЛЬНОЙ ФОРМЫ | 2013 |
|
RU2540104C1 |
| СИСТЕМА ЭЛЕКТРОПРИВОДА | 1993 |
|
RU2068614C1 |
Изобретение относится к области электротехники и может быть использовано в исполнительных устройствах различного назначения. Техническим результатом является упрощение конструкции и повышение надежности мехатронной системы, выполненной на основе m-фазного индукторного двигателя. Мехатронная система содержит датчик скорости, задатчик скорости, логический блок, регулятор скорости, блок управления, транзисторный коммутатор, индукторный двигатель со статором с сосредоточенными обмотками на полюсах и ферромагнитным ротором, индуктивные датчики приближения, размещенные между соседними катушками. Индуктивные датчики приближения выполняют функцию датчика положения и взаимодействуют с полюсами ферромагнитного ротора, который таким образом является элементом датчика положения. Логический блок преобразует выходные сигналы индуктивных датчиков приближения в цифровой код, соответствующий угловому положению ротора и, в случае реверсивного двигателя, направлению вращения. 1 ил.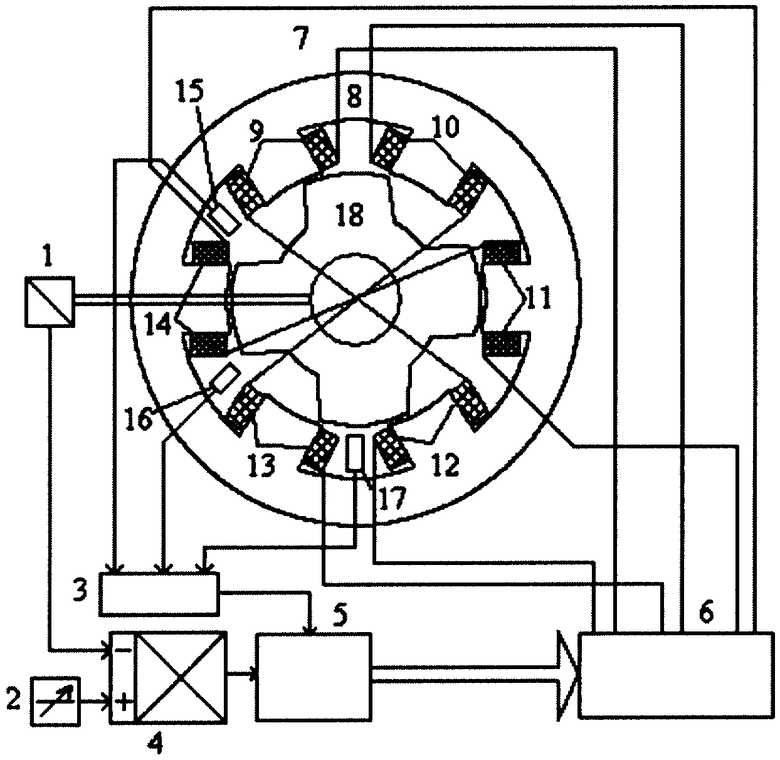
Мехатронная система, содержащая m-фазный индукторный двигатель, датчик и задатчик скорости, датчик положения ротора, регулятор скорости, блок управления и транзисторный коммутатор, m выходов которого подключены к m фазным обмоткам индукторного двигателя, а управляющий вход соединен с выходом блока управления, вход которого подключен к выходу регулятора скорости, суммирующий и вычитающий входы которого подключены к выходам соответственно задатчика и датчика скорости, отличающаяся тем, что дополнительно введен логический блок, датчик положения выполнен в виде m/2 при четном m или m при нечетном m индуктивных датчиков приближения, размещенных в пазах статора последовательно между соседними катушками, входы логического блока подключены к выходам индуктивных датчиков приближения, а выход соединен с входом блока управления.
| КУЗНЕЦОВ В.А., КУЗЬМИЧЕВ В.А | |||
| Вентильно-индукторный двигатель | |||
| - М.: МЭИ, 2003, с.5, рис.1 | |||
| RU 20753305 С1, 10.02.1997 | |||
| РЕВЕРСИВНЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД (ВАРИАНТЫ) | 1999 |
|
RU2142193C1 |
| Вентильный электродвигатель | 1989 |
|
SU1676020A1 |
| Устройство для подачи длинномерных деталей | 1985 |
|
SU1323329A1 |
| СПОСОБ ЗАЩИТЫ ДОКУМЕНТОВ ИЛИ ЦЕННЫХ ОБЪЕКТОВ | 2000 |
|
RU2167253C1 |
| US 3767986 А, 28.10.1973 | |||
| СПОСОБ ПОЛУЧЕНИЯ СЫРЦОВЫХ ПРЯНИКОВ | 2013 |
|
RU2510836C1 |
| СПОСОБ ОБРАБОТКИ СОДЕРЖАЩЕГО ДИОКСИД УГЛЕРОДА ОТХОДЯЩЕГО ГАЗА С ПРОЦЕССА ЭЛЕКТРОПЛАВКИ | 2012 |
|
RU2601981C2 |
| Устройство для стыковой сварки труб из термопластов | 1980 |
|
SU1028516A1 |

