Изобретение относится к технике оптического приборостроения и может быть использовано, в частности, при разработке многоканальных обзорно-поисковых систем, осуществляющих обнаружение цели в контролируемой зоне, ее выделение на различных фонах, определение ее координат и отслеживание, а также определение отдельных параметров движения цели, например дальности до нее.
Известны системы, осуществляющие поиск, обнаружение цели и измерение дальности до нее (см., например, патент РФ №2145433, кл. G02В 23/04, 2000, патент РФ №2180090, кл. F41G 7/26, 2000).
Из известных систем наиболее близкой к заявляемой по технической сущности является многоканальная система наведения (патент РФ №2199709, кл. F41G 7/26, 2003). Она содержит телевизионный канал обнаружения, лазерный дальномер, источник излучения, два плоских зеркала, предназначенные для отклонения лазерного излучения, первый объектив для коллимирования лазерного излучения, инфракрасный канал обнаружения, второй объектив для приема инфракрасного излучения цели, плоское зеркало для сканирования поля зрения второго объектива, N-элементный фотоприемник, аналого-цифровой преобразователь, блок выработки координат, датчик положения сканирующего зеркала и электронный ключ.
Недостатки этой системы наведения:
- обнаружение цели по уровню сигнала приводит к низкой достоверности распознавания (ложные тревоги, пропуск цели);
- существенная зависимость от условий наблюдения цели (освещенность, шумы и т.п.).
Техническим результатом заявленного изобретения является повышение достоверности распознавания изображения цели путем обеспечения независимости эталона от условий ее наблюдения.
Это можно осуществить с помощью корреляционно-экстремальной обработки видеоинформации, включающей в себя три этапа:
- предварительная обработка изображений;
- вычисление значений критериальной функции;
- поиск экстремума критериальной функции.
Этап предварительной обработки описывается следующим образом:

k=1, …, M; l=1, …, N; i=1, …, n; j=1, …, m,
где  - элементы матрицы результирующего изображения;
- элементы матрицы результирующего изображения;
 - элементы матрицы исходного изображения;
- элементы матрицы исходного изображения;
 - элементы матрицы импульсного отклика цифрового фильтра;
- элементы матрицы импульсного отклика цифрового фильтра;
n и m - число элементов отклика цифрового фильтра соответственно по осям x и y (размера матрицы импульсного отклика цифрового фильтра);
N и М - число элементов результирующего и исходного изображений соответственно по осям x и y (размеры матрицы результирующего и исходного изображений);
x и y - пространственные координаты.
В качестве критериальной функции предлагается использовать адаптивный разностный алгоритм в следующем виде:

k=1, …, M; l=1, …, N; f=1, …, P; j=1, …, Q,
где  - элементы матрицы эталонного изображения;
- элементы матрицы эталонного изображения;
Р и Q - число элементов эталонного изображения соответственно по осям x и y (размеры матрицы эталонного изображения);
а и b - параметры линейного преобразования, определяются в следующей последовательности.
Оценивается математическое ожидание Мэ фрагмента изображения Sэ по формуле

f=1, …, P; g=1, …, Q.
Определяется дисперсия Dэ фрагмента изображения Sэu по формуле

f=1, …, P; g=1, …, Q.
Оценивается математическое ожидание MT фрагмента матрицы результирующего изображения  по формуле
по формуле
k=1, …, M; l=1, …, N.
Определяется дисперсия DT фрагмента матрицы результирующего изображения по формуле

k=1, …, M; j=1, …, N.
Величины а и b определяются по следующим зависимостям:


В дальнейшем осуществляется поиск минимума значения критериальной функции R(k,l). Затем определяются величины k и l, соответствующие Rmin, которые обозначают координаты цели, подаваемые на выход системы.
Технический результат достигается тем, что многоканальная система наведения, использующая эталонное изображение, включающая в себя лазерный дальномер, содержащий последовательно расположенные источник излучения, первое и второе плоские зеркала с приводом вращения каждое и первый объектив и, по меньшей мере, два канала обнаружения, один из которых выполнен телевизионным, а другой - инфракрасным, при этом отражающие поверхности первого и второго зеркал обращены друг к другу и расположены под углом к оптической оси первого объектива, информационный канал обнаружения содержит второй объектив, оптически сопряженный через сканирующее плоское зеркало с оптическим входом N-элементного фотоприемника, датчик положения сканирующего зеркала, ключ, управление работой которого осуществляется автоматически или с помощью оператора, а также аналого-цифровой преобразователь, при этом выходы с первого по N-й N-элементного фотоприемника соединены с соответствующими входами аналого-цифрового преобразователя, управляющий вход которого соединен с выходом датчика положения сканирующего зеркала, первый и второй входы ключа соединены с первым и вторым выходами телевизионного канала обнаружения соответственно, а первый и второй выходы ключа являются выходом системы, а также подключены к приводам вращения первого и второго плоских зеркал соответственно, дополнительно содержит блок оценки коэффициентов линейного преобразования, блок вычисления критериальной функции, блок выбора минимального значения критериальной функции и блок формирования матрицы исходного изображения, с первого по N-й входы которого соединены с соответствующими выходами аналого-цифрового преобразователя, а с первого по N-й выходы - с соответствующими входами блока определения элементов матрицы результирующего изображения, с первого по m-й входы которого являются входом системы, на который поступают величины h(i,j), характеризующие элементы матрицы импульсного отклика цифрового фильтра, а с первого по N-й выходы - с соответствующими входами блока оценки коэффициентов линейного преобразования и блока вычисления критериальной функции, с (N+1)-го по (N+Р)-й входы которых являются входом системы, на который поступают величины Sэи(f,g), характеризующие элементы матрицы эталонного изображения, первый и второй выходы блока оценки коэффициентов линейного преобразования подключены соответственно к (N+Р+1)-му и (N+Р+2)-му входам блока вычисления критериальной функции, с первого по N-й выходы которого соединены с соответствующими входами блока выбора минимального значения критериальной функции, первый и второй выходы которого подключены соответственно к (N+1)-му и (N+2)-му входам блока формирования матрицы исходного изображения, (N+1)-й и (N+2)-й выходы которого соединены соответственно с третьим и четвертым входами ключа.
На чертеже представлена блок-схема многоканальной системы наведения, использующей эталонное изображение. Здесь приняты следующие обозначения:
1 - телевизионный канал обнаружения, предназначен для определения координат цели в видимом диапазоне длин волн, при этом диаметр входного зрачка приемного объектива DTB=90 мм, а фокусное расстояние fTB=200 мм, и может быть выполнен по одной из схем, приведенных в справочнике "Авиационные системы информации" под ред. Л.З.Криксунова. - М.: Машиностроение, 1985, с.162-167;
2 - лазерный дальномер, предназначен для измерения расстояний до 40 км с точностью 3-5 м и может быть выполнен по одной из схем, приведенных в вышеназванном справочнике под ред. Л.З.Крискунова на с.5-28;
3 - источник излучения, предназначен для облучения наблюдаемой цели и может быть выполнен на базе твердотельного лазера на основе YAG, имеющего световой пучок диаметром 8-10 мм;
4 и 5 - первое и второе плоские зеркала соответственно, предназначены для отклонения лазерного излучения в двух взаимно перпендикулярных плоскостях;
6 - первый объектив, предназначен для коллимирования лазерного излучения и может быть выполнен в виде телескопической системы с диаметром входного зрачка DBX=12 мм, диаметром выходного зрачка DВЫХ=85 мм и увеличением Г=0,14;
7 - инфракрасный канал обнаружения, предназначен для обнаружения и определения координат цели в контролируемом пространстве, имеющей тепловой контраст, например, в спектральном диапазоне 3-5 мкм или 8-13 мкм;
8 - второй объектив, предназначен для приема инфракрасного излучения цели и фокусировки его на чувствительные площадки фотоприемника 10 и может быть выполнен в виде зеркала с диаметром входного окна DВХ=250 мм, фокусным расстоянием f=360 мм и полем зрения 1,5×1,5°;
9 - сканирующее плоское зеркало, предназначено для сканирования поля зрения объектива 8 в плоскости, перпендикулярной линейке фотоприемников 10, и может быть выполнено со световым диаметром примерно 125 мм;
10 - N-элементный фотоприемник, предназначен для преобразования инфракрасного излучения цели в электрический сигнал и может быть выполнен в виде линейки из 192 чувствительных элементов (см. патент США №4221966, кл. G01J 1/00 от 09.09.1980), при этом линейка расположена в плоскости чертежа;
11 - аналого-цифровой преобразователь, предназначен для усиления и преобразования аналоговых сигналов в сигналы, квантованные по времени и амплитуде, и может быть выполнен на микросхемах типа 1108П1А и К140УД284;
12 - датчик положения сканирующего зеркала, представляет собой оптико-электронное устройство на базе однокоординатного фотоэлектрического автоколлиматора с погрешностью измерения не более 20 угл. с;
13 - электронный ключ, предназначен для переключения телевизионного и инфракрасного каналов и может быть выполнен на базе мультиплексоров серии 1553;
14 - блок формирования матрицы исходного изображения, предназначен для сбора информации, характеризующей исходное изображение цели, передачи ее для дальнейшей обработки и выдачи координат цели;
15 - блок определения элементов матрицы результирующего изображения, предназначен для вычисления элементов матрицы результирующего изображения в соответствии с формулой (1) и их выдачи для дальнейшей отработки;
16 - блок оценки коэффициентов линейного преобразования, предназначен для вычисления этих коэффициентов по формулам (3), (4), (5), (6), (7) и (8) и их выдачи для дальнейшей работы системы;
17 - блок вычисления критериальной функции, предназначен для оценки этой функции в соответствии с формулой (2) и передачи ее значений для дальнейшей отработки;
18 - блок выбора минимального значения критериальной функции, предназначен для поиска наименьшего значения этой функции и выдачи на входы блока 14 информации о координатах цели.
Следует подчеркнуть, что блоки с 14 по 18 являются цифровыми вычислительными и могут быть реализованы в соответствии с рекомендациями приведенных источников информации [1], [2], [3].
Многоканальная система наведения, использующая эталонное изображение, работает следующим образом.
Допустим, что не нарушает общности рассуждений, цель попала в поле зрения телевизионного 1 и инфракрасного 7 каналов обнаружения и что контраст между ней и окружающим ее фоном в обоих каналах присутствует. Тогда координаты Uхт и Uут цели с первого и второго выходов телевизионного канала поступают на первый и второй входы ключа 13, который находится в разомкнутом состоянии.
В инфракрасном канале обнаружения излучение цели улавливается объективом 8 и после отражения от плоского зеркала 9 фокусируется на чувствительной площадке N-элементного фотоприемника 10. Плоское зеркало 9 колеблется вокруг оси ОМ, лежащей в плоскости чертежа, и тем самым осуществляет сканирование поля зрения в плоскости, перпендикулярной плоскости чертежа.
С выхода фотоприемника 10 сигнал поступает на вход аналого-цифрового преобразователя 11, где он усиливается и преобразуется из аналогового в цифровой, т.е. дискретизируется и квантуется. При этом здесь этот процесс управляется выходными сигналами датчика 12 положения сканирующего зеркала. Выходные сигналы цифроаналогового преобразователя 11 поступают на вход блока 14 формирования матрицы исходного изображения, где осуществляется сбор информации, характеризующей исходное изображение цели, т.е. элементы матрицы исходного изображения.
Эти элементы ST(k+i-1, l+j-1) подаются на вход блока 15 определения матрицы результирующего изображения, на другой вход которого засылаются элементы матрицы h(i,j) импульсного отклика цифрового фильтра. В блоке 15 осуществляется вычисление элементов матрицы результирующего изображения  по формуле (1), которые направляются на входы блока 16 оценки коэффициентов линейного преобразования и блока 17 вычисления критериальной функции. На другие входы блоков 16 и 17 подаются значения элементов матрицы эталонного изображения Sэи(f,g).
по формуле (1), которые направляются на входы блока 16 оценки коэффициентов линейного преобразования и блока 17 вычисления критериальной функции. На другие входы блоков 16 и 17 подаются значения элементов матрицы эталонного изображения Sэи(f,g).
Следует отметить, что блок 17 на указанных входах должен иметь элементы задержки, поскольку он может начать работу только после получения информации от блока 16, который осуществляет оценку параметров линейного преобразования а и b соответственно по формулам (7) и (8), предварительно производя вычисления по формулам (3), (4), (5) и (6). Величины а и b засылаются на входы блока 17 вычисления критериальной функции. Этот блок производит вычисление критериальной функции R(k,l) в соответствии с формулой (2). Эти значения направляются на вход блока 18 выбора минимального значения критериальной функции.
Блок 18 осуществляет поиск наименьшего значения критериальной функции Rmin и засылает величины k и l, соответствующие Rmin, на входы (N+1)- й и (N+2)-й блока 14 формирования матрицы исходного изображения. Блок 14 производит выбор координат, определяемых значениями k и l, которые являются координатами цели. Например, если k=5, a l=6, то координаты цели будут следующие: по оси x - 5-е значение, а по оси у - 6-е.
Сигналы Uхи и Uуп поступают на третий и четвертый входы ключа 13, управление работой которого осуществляется автоматически или вручную с помощью оператора. С выхода ключа 13 сигналы телевизионного или инфракрасного каналов обнаружения поступают на входы приводов зеркал 4 и 5 и привода слежения всего комплекса аппаратуры, т.е. на выход системы наведения.
Таким образом, технический результат достигается не за счет использования математического аппарата, а за счет технических средств (блоков и элементов), упомянутых в процессе описания работы системы, которая позволяет повысить достоверность распознавания изображения цели путем обеспечения независимости эталона от условий ее наблюдения.
Промышленная применимость изобретения обосновывается тем, что оно может быть использовано в различных областях (отраслях) в процессе поиска и определения координат целей или каких-либо других объектов.
Источники информации
1. Приборы с зарядовой связью. /Под ред. М.Хоувза и Д.Моргана: Пер. с англ. - М.: Энергоиздат, 1981. - 376 с., ил.
2. Руководство пользователя по сигнальным микропроцессорам ADSP-2100. / Пер. с англ. О.В. Луневой; Под ред. А.Д.Викторова; Санкт-Петербургский государственный электротехнический университет. - Санкт-Петербург, 1997. - 520 с.
3. В.Б. Стешенко. ПЛИС фирмы "ALTERA": Проектирование устройств обработки сигналов. / М.: "Додека", 2000.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЦВЕТНОСТИ ЭЛЕМЕНТА ЦЕЛИ В КОНТРОЛИРУЕМОЙ ЗОНЕ | 2022 |
|
RU2785092C1 |
| МНОГОКАНАЛЬНАЯ СИСТЕМА НАВЕДЕНИЯ | 2000 |
|
RU2199709C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ФУНКЦИЙ ЦЕННОСТИ ЕДИНИЧНЫХ ОЦЕНОЧНЫХ ПОКАЗАТЕЛЕЙ СЛОЖНЫХ ТЕХНИЧЕСКИХ СИСТЕМ | 2010 |
|
RU2445687C1 |
| Навигационная комбинированная оптическая система | 2018 |
|
RU2694786C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ОЦЕНОЧНЫХ ПОКАЗАТЕЛЕЙ ПРИ ОПРЕДЕЛЕНИИ ТЕХНИЧЕСКОГО УРОВНЯ СЛОЖНЫХ ТЕХНИЧЕСКИХ СИСТЕМ | 2010 |
|
RU2435209C1 |
| Оптико-электронная система для определения спектроэнергетических параметров и координат источника лазерного излучения инфракрасного диапазона | 2015 |
|
RU2616875C2 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ГЕОМЕТРИЧЕСКИХ ИСКАЖЕНИЙ ФОНА В ПОСЛЕДОВАТЕЛЬНОСТИ ТЕЛЕВИЗИОННЫХ ИЗОБРАЖЕНИЙ | 2008 |
|
RU2367111C1 |
| Комбинированная многоканальная головка самонаведения | 2017 |
|
RU2693028C2 |
| УСТРОЙСТВО ИМИТАЦИИ ИНФРАКРАСНОГО ИЗЛУЧЕНИЯ НАЗЕМНЫХ ОБЪЕКТОВ | 2013 |
|
RU2547759C1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ ПРЕДПОЧТИТЕЛЬНОГО УРОВНЯ УНИФИКАЦИИ ТЕХНИЧЕСКИХ СИСТЕМ | 2010 |
|
RU2427900C1 |
Система содержит лазерный дальномер, два канала обнаружения, один из которых выполнен телевизионным, а другой - инфракрасным, который содержит второй объектив и N-элементный фотоприемник, датчик положения сканирующего зеркала, ключ, аналого-цифровой преобразователь, блок определения элементов матрицы результирующего изображения, блок оценки коэффициентов линейного преобразования, блок вычисления критериальной функции, блок выбора минимального значения критериальной функции и блок формирования матрицы исходного изображения. Технический результат - повышение достоверности распознавания изображения цели путем обеспечения независимости эталона от условий ее наблюдения. 1 ил.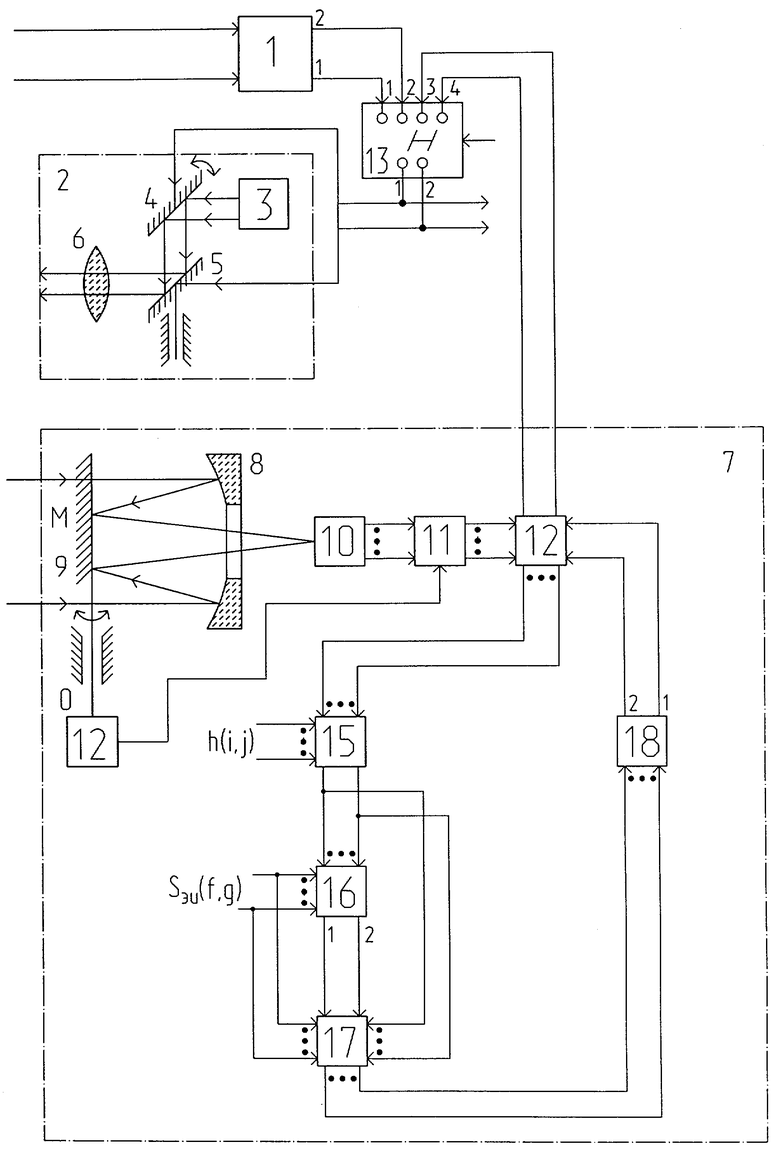
Многоканальная система наведения, использующая эталонное изображение, включающая в себя лазерный дальномер, содержащий последовательно расположенные источник излучения, первое и второе плоские зеркала с приводом вращения каждое и первый объектив и, по меньшей мере, два канала обнаружения, один из которых выполнен телевизионным, а другой - инфракрасным, при этом отражающие поверхности первого и второго зеркал обращены друг к другу и расположены под углом к оптической оси первого объектива, инфракрасный канал обнаружения содержит второй объектив, оптически сопряженный через сканирующее плоское зеркало с оптическим входом N-элементного фотоприемника, датчик положения сканирующего зеркала, ключ, управление работой которого осуществляется автоматически или с помощью оператора, а также аналого-цифровой преобразователь, при этом выходы с первого по N-ый N-элементного фотоприемника соединены с соответствующими входами аналого-цифрового преобразователя, управляющий вход которого соединен с выходом датчика положения сканирующего зеркала, первый и второй входы ключа соединены с первым и вторым выходами телевизионного канала обнаружения соответственно, а первый и второй выходы ключа являются выходом системы, а также подключены к приводам вращения первого и второго плоских зеркал соответственно, отличающаяся тем, что она дополнительно содержит блок определения элементов матрицы результирующего изображения, блок оценки коэффициентов линейного преобразования, блок вычисления критериальной функции, блок выбора минимального значения критериальной функции и блок формирования матрицы исходного изображения, с первого по N-ый входы которого соединены с соответствующими выходами аналого-цифрового преобразователя, а с первого по N-ый выходы - с соответствующими входами блока определения элементов матрицы результирующего изображения, с первого по m-ый входы которого являются входом системы, на который поступают величины h(i, j), характеризующие элементы матрицы импульсного отклика цифрового фильтра, а с первого по N-ый выходы - с соответствующими входами блока оценки коэффициентов линейного преобразования и блока вычисления критериальной функции, с (N+1)-го по (N+P)-ый входы которых являются входом системы, на который поступают величины Sэu(f,g), характеризующие элементы матрицы эталонного изображения, первый и второй выходы блока оценки коэффициентов линейного преобразования подключены соответственно к (N+P+1)-му и (N+P+2)-му входам блока вычисления критериальной функции, с первого по N-ый выходы которого соединены с соответствующими входами блока выбора минимального значения критериальной функции, первый и второй выходы которого подключены соответственно к (N+1)-му и (N+2)-му входам блока формирования матрицы исходного изображения, (N+1)-ый и (N+2)-ой выходы которого соединены соответственно с третьим и четвертым входами ключа.
| МНОГОКАНАЛЬНАЯ СИСТЕМА НАВЕДЕНИЯ | 2000 |
|
RU2199709C2 |
| ДВУХКАНАЛЬНАЯ СИСТЕМА НАВЕДЕНИЯ | 1998 |
|
RU2138003C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ УПРАВЛЕНИЯ ОГНЕМ (ВАРИАНТЫ) | 2002 |
|
RU2224206C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА АВТОСОПРОВОЖДЕНИЯ | 1993 |
|
RU2081383C1 |
| US 4324491 A, 14.04.1982 | |||
| US 4221966 A, 09.09.1980. | |||

