Изобретение относится к цифровой обработке изображений и может быть использовано в охранных системах, системах технического зрения, системах космического мониторинга Земли и др.
Известен способ обработки сигналов для выделения объектов, наблюдаемых в последовательности телевизионных изображений [Пат. РФ №2311684, Бюл. №33, 27.11.2007], состоящий в том, что запоминается первый кадр обрабатываемой последовательности в качестве фонового изображения, определяются параметры сдвига и поворота изображения текущего кадра относительно эталонного изображения, при этом угол поворота изображения текущего кадра относительно эталонного изображения определяется до вычисления параметров сдвига изображения, а затем вычисляются параметры сдвига изображения текущего кадра относительно эталонного изображения с субпиксельной точностью, после проверки условия смены эталонного изображения вычисляют параметры сдвига изображения текущего кадра относительно фонового изображения и угла поворота изображения текущего кадра относительно изображения первого кадра по найденным значениям параметров сдвига и поворота текущего кадра относительно эталонного изображения.
Недостатками указанного способа являются высокие вычислительные затраты, а также отсутствие механизма отсеивания участков изображения, содержащих движущиеся объекты.
Известен способ обработки сигналов для совмещения наблюдаемых телевизионных изображений [Ranganath H.S., Borland J.S., Malcolm W.W. Feature extraction technique for fast digital image registration: SOUTHEASTCON, Proceedings of the Region 3 Conference and Exhibit, 1980. - Pp.225-228], состоящий в том, что запоминается исходное изображение, на нем выделяются наиболее информативные участки изображения, запоминается текущее изображение, производится корреляционная обработка выбранных участков с целью установления соответствия текущего и исходного изображений.
Недостатком данного способа является несовершенство метода выделения опорных участков, а также то, что он не учитывает возможность поворота текущего изображения относительно исходного.
Наиболее близким к заявляемому способу является выбранный в качестве прототипа способ обработки сигналов для определения координат объектов, наблюдаемых в последовательности телевизионных изображений [Пат. РФ №2193825, Бюл. №33 27.11.2002], состоящий в том, что принимаются и запоминается сигналы текущего телевизионного изображения, на изображении выбираются 2-N ориентиров, причем N=3, 4, 5,…, формируются сигналы несходства телевизионных изображений 2·N ориентиров текущего телевизионного изображения и телевизионных изображений 2·N ориентиров предыдущего телевизионного изображения, определяются смещения телевизионных изображений 2·N ориентиров текущего телевизионного изображения относительно телевизионных изображений 2-N ориентиров предыдущего телевизионного изображения, на их основе определяют перемещение и крен поля текущего изображения за время между приемом предыдущего и текущего изображений.
Недостатком данного способа является несовершенство метода определения ориентиров, невозможность определения параметров смещения и поворота изображения с малым количество ориентиров, недостаточная точность определения смещения ориентиров.
Технической задачей изобретения является повышение точности определения параметров геометрических преобразований за счет выбора наилучших опорных участков и повышения точности вычисления их координат.
Технический результат, достигаемый при осуществлении заявленного изобретения, заключается в принятии и аналого-цифровом преобразовании сигнала изображения каждого кадра, выборе на первом кадре обрабатываемой последовательности Мэт опорных участков, где Мэт=4, 5, назначении первых Мэт-1 участков основными, а последнего - поисковым, определении положения опорных участков с субпиксельной точностью по данным каждого кадра за время между приемом текущего и следующего кадра, определение на основе координат опорных участков на текущем и предыдущем кадре параметров сдвига и поворота фонового изображения относительно предыдущего изображения, вычисление параметров сдвига и поворота фонового изображения относительно первого кадра, взаимозамене опорного участка, имеющего наибольшую невязку, и поискового опорного участка, замене поискового опорного участка на произвольный участок текущего изображения, не пересекающийся с основными опорными участками и находящийся на достаточном удалении от границ изображения, замене опорных участков, находящихся на небольшом удалении от границ кадра, на произвольные участки текущего изображения, не пересекающиеся с основными опорными участками и находящиеся на достаточном удалении от границ изображения, проведении межкадровой экспоненциальной фильтрации эталонных изображения опорных участков.
Способ обработки сигналов для определения параметров геометрических искажений фона в последовательности телевизионных изображений включает в себя выполнение следующих действий.
Производится прием и аналого-цифровое преобразование сигнала изображения каждого кадра наблюдаемой последовательности. Результат аналого-цифрового преобразования изображения каждого кадра имеет вид матрицы чисел l(i, j, n),  ,
,  где I и J - размеры оцифрованного изображения в элементах разрешения (пикселях), n=1, 2, 3,… - номер кадра. Каждый элемент матрицы l(i, j, n) является результатом квантования яркости соответствующей точки наблюдаемой сцены.
где I и J - размеры оцифрованного изображения в элементах разрешения (пикселях), n=1, 2, 3,… - номер кадра. Каждый элемент матрицы l(i, j, n) является результатом квантования яркости соответствующей точки наблюдаемой сцены.
Осуществляется выбор на изображении первого кадра Мэт опорных участков, где Мэт=4, 5,…. Для этого на первом кадре изображения формируется зона выбора опорных участков Z(n). Она включает в себя точки z(i, j, n) изображения l(i, j, n) первого кадра, отвечающие следующим условиям:

где р - параметр, характеризующий минимальное удаление опорного участка от границ кадра.
Зона поиска первого опорного участка Z1(n) полностью соответствует выбранной зоне поиска Z(n). Зоны поиска всех опорных участков, исключая первый, формируются по правилу:
 ,
,
где  - номер опорного участка;
- номер опорного участка;
ωm(n) - множество точек, принадлежащих эталону wm(α, β, n);
А\В - операция исключения точек множества В из множества A.
Опорный участок wm(α, β, n) выбирается в зоне поиска Zm(n) по следующему правилу:

где
при i, j∈Zm(n), - матрица значений критерия выбора
am, bm - размеры опорного участка;
i, j - координаты центра текущего опорного участка;
 - среднее значение яркости по текущему опорному участку.
- среднее значение яркости по текущему опорному участку.
Производится назначение первых МЭт - 1 участков основными, а последнего - поисковым. Изображения опорных участков на первом кадре принимаются за эталонные изображения wm(α, β, n).
Обработка каждого кадра наблюдаемой последовательности изображений, начиная со второго, начинается с предварительной оценки положения изображений опорных участков  ,
,  . Определение предварительных оценок координат всех опорных участков на текущем изображении кадра производится по правилу:
. Определение предварительных оценок координат всех опорных участков на текущем изображении кадра производится по правилу:

где
 - разностная критериальная функция;
- разностная критериальная функция;
wm(α, β, n) - изображение m-го опорного участка в n-м кадре;
Wm (n) - зона поиска m-го опорного участка в n-м кадре.
Зона поиска Wm(n) представляет собой прямоугольную область изображения, центр которой находится в точке (im(n-1), jw(n-1)), а размеры Iw, Jw заданы заранее и одинаковы для всех опорных участков.
Для уточнения предварительных оценок положения опорных участков производится определение субпиксельных поправок оценок координат δim(n), δjm(n) всех опорных участков на текущем изображении кадра.
Субпиксельные поправки определяются из значений критериальной функции, аппроксимированной в ближайшей окрестности точки  полиномом второго порядка:
полиномом второго порядка:
 ;
;
 .
.
Итоговые оценки положения опорных участков  ,
,  на текущем изображении кадра вычисляются по следующему правилу:
на текущем изображении кадра вычисляются по следующему правилу:
 ,
,
 .
.
Используя полученные оценки положения опорных участков, столбец  , содержащий предварительные оценки параметров смещения и поворота текущего изображения относительно предыдущего, вычисляется по следующему правилу:
, содержащий предварительные оценки параметров смещения и поворота текущего изображения относительно предыдущего, вычисляется по следующему правилу:
 ,
,
(m=1,2,…,Мэт)
где А- - операция псевдообращения матрицы А.
Так как  , то значения
, то значения  будут оцениваться приближенно.
будут оцениваться приближенно.
Исходя из этого, выполняется вычисление столбца невязки оценки D(n) по значениям  и
и  ,
,  следующим образом:
следующим образом:
 .
.
(m=1,2,…,Мэт)
Так как опорный участок с наибольшим суммарным абсолютным значением невязки наиболее вероятно будет вносить наибольшую ошибку в оценку положения изображений опорных участков, то его номер md определяется по следующему правилу:
 .
.
Из рассмотрения исключается поисковый опорный участок, а также участок с номером md. В том случае, когда md=Мэт, ни один основной опорный участок из рассмотрения не исключается. По оценкам координат оставщихся основных опорных участков вычисляются итоговые оценки  параметров смещения и поворота текущего изображения относительно предыдущего по следующему правилу:
параметров смещения и поворота текущего изображения относительно предыдущего по следующему правилу:
 .
.
(m=1,2,…, md-1, md+1,…, Мэт-1)
Значения параметров сдвига Δi(n), Δj(n) и поворота Δφ(n) фона текущего изображения относительно фона первого кадра вычисляются по правилу:
 ,
,
 ,
,

В случае, когда  , наибольшую суммарную абсолютную невязку имеет основной опорный участок
, наибольшую суммарную абсолютную невязку имеет основной опорный участок  . Этот участок с поисковым опорным участком
. Этот участок с поисковым опорным участком  заменяется один на другой по следующему правилу:
заменяется один на другой по следующему правилу:
 ,
,
 ,
,
 .
.
Так как поисковый опорный участок подлежит замене каждый кадр, то присвоение ему данных заменяемого им основного опорного участка не требуется.
Поисковый опорный участок и все основные опорные участки wk(α, β, n), расположенные на расстоянии менее р пикселей от границ изображения, необходимо заменить на опорные участки, выбираемые в зонах поиска Zk(n) случайным образом. При этом зоны поиска Zk(n) формируются на основе Z(n) последовательным исключением из нее всех опорных участков, остающихся неизменными, а также всех уже выбранных эталонов.
Производится межкадровая экспоненциальная фильтрация эталонных изображений опорных участков, не подвергавшихся замене, по следующему правилу:
 ,
,
где kф∈[0, 1] - коэффициент межкадровой фильтрации эталонных изображений опорных участков.
Таким образом, отличия заявляемого способа от прототипа состоят в следующем:
1) наличии улучшенного метода выбора опорных участков;
2) наличии поискового опорного участка и процедуры, позволяющих адаптировать алгоритм к изменениям наблюдаемого изображения;
3) вычислении координат опорных участков с субпиксельной точностью;
4) возможности определения параметров смещения и поворота фона на изображении с малым количеством ориентиров.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ ДЛЯ ВЫДЕЛЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ В ПОСЛЕДОВАТЕЛЬНОСТИ ТЕЛЕВИЗИОННЫХ ИЗОБРАЖЕНИЙ | 2006 |
|
RU2311684C1 |
| СПОСОБ ОБРАБОТКИ ПОСЛЕДОВАТЕЛЬНОСТИ ИЗОБРАЖЕНИЙ ДЛЯ АВТОМАТИЧЕСКОГО ОБНАРУЖЕНИЯ ТАНКЕРА И ОЦЕНИВАНИЯ ЕГО ТРАЕКТОРНЫХ ПАРАМЕТРОВ ПРИ ДОЗАПРАВКЕ В ВОЗДУХЕ НА ФОНЕ ЗВЕЗДНОГО НЕБА | 2016 |
|
RU2624828C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ЦЕЛИ | 2004 |
|
RU2272254C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2014 |
|
RU2564552C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2011 |
|
RU2483324C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВЫХ МОДЕЛЕЙ МЕСТНОСТИ | 2007 |
|
RU2364887C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ КООРДИНАТНЫХ СМЕЩЕНИЙ ОБЪЕКТА СЛЕЖЕНИЯ В ПОСЛЕДОВАТЕЛЬНОСТИ ЦИФРОВЫХ ИЗОБРАЖЕНИЙ | 2011 |
|
RU2460135C1 |
| СПОСОБ СУБПИКСЕЛЬНОГО КОНТРОЛЯ И СЛЕЖЕНИЯ ЗА ПЕРЕМЕЩЕНИЕМ УДАЛЕННОГО ОБЪЕКТА | 2012 |
|
RU2506536C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖУЩИМСЯ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2476825C2 |
| СПОСОБ ПОЛУЧЕНИЯ НА ЛЕТАТЕЛЬНОМ АППАРАТЕ (ЛА) УЛУЧШЕННОГО ИЗОБРАЖЕНИЯ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2015 |
|
RU2591029C1 |
Изобретение относится к цифровой обработке изображений и может быть использовано в охранных системах, системах технического зрения, системах космического мониторинга Земли и др. Технической результат заключается в повышении точности определения параметров геометрических преобразований за счет выбора наилучших опорных участков и повышении точности вычисления их координат. Для чего выбирают на изображении первого кадра Мэт опорных участков, где Мэт=4, 5,…, назначают первые Мэт-1 участков основными, а последний - поисковым. Принимают изображения опорных участков на первом кадре за эталонные. Определяют положения опорных участков с субпиксельной точностью по данным каждого кадра за время между приемом текущего и следующего кадра. Определяют с помощью координат опорных участков на текущем и предыдущем кадре параметры сдвига и поворота фонового изображения относительно предыдущего и первого кадра. 4 з.п. ф-лы.
1. Способ обработки телевизионных сигналов для определения параметров геометрических искажений фона в последовательности телевизионных изображений, заключающийся в приеме и аналого-цифровом преобразовании сигнала изображения каждого кадра, определении параметров сдвига и поворота изображения текущего кадра относительно первого кадра, отличающийся тем, что на изображении первого кадра выбирают Мэт опорных участков, где Мэт=4, 5,…, назначают первых Мэт-1 участков основными, а последний - поисковым, принимают изображения опорных участков на первом кадре за эталонные, определяют положение опорных участков с субпиксельной точностью по данным каждого кадра за время между приемом текущего и следующего кадра, взаимозаменяют опорный участок, имеющий наибольшую невязку и поисковый опорный участок, заменяют поисковый опорный участок на произвольный участок текущего изображения, не пересекающийся с основными опорными участками и находящийся на достаточном удалении от границ изображения, заменяют опорные участки, находящиеся на небольшом удалении от границ кадра, на произвольные участки текущего изображения, не пересекающиеся с основными опорными участками и находящиеся на достаточном удалении от границ изображения, проводят межкадровую экспоненциальную фильтрацию эталонных изображений опорных участков.
2. Способ по п.1, отличающийся тем, что m-й опорный участок выбирают в первом кадре последовательности по правилу:
где 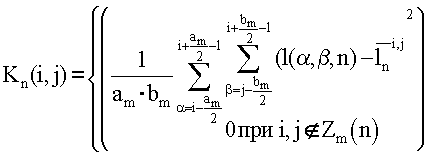
при i, j∈Zm(n) - матрица значений критерия;
n - текущий номер кадра;
l(α, β, n) - текущее изображение;
am, bm - размеры опорного участка;
i, j - координаты центра текущего опорного участка;

- среднее значение яркости по текущему опорному участку;
Zm (n) - зона выбора опорных участков.
3. Способ по п.1, отличающийся тем, что координаты m-го опорного участка  ,
,  , в n-м кадре вычисляются по правилу:
, в n-м кадре вычисляются по правилу:

 ,
,
где δim(n), δjm(n) - субпиксельные поправки оценок координат m-го опорного участка;

- предварительные оценки координат m-го опорного участка;
 - разностная критериальная функция;
- разностная критериальная функция;
wm (α, β, n) - изображение m-го опорного участка в n-м кадре;
Wm(n) - зона поиска m-го опорного участка в n-м кадре.
4. Способ по п.3, отличающийся тем, что вычисление субпиксельных поправок оценок координат m-го опорного участка производится по следующему правилу:
 ;
;
 .
.
5. Способ по п.1, отличающийся тем, что вычисление параметров сдвига (Δi(n), Δj(n)) и поворота Δφ фонового изображения относительно первого кадра производится на основе столбца итоговых оценок параметров геометрических преобразований по следующему правилу:
 ,
,
 ,
,
 ,
,
где
 -
-
(m=1, 2,…,md-1,md+1…,Mэm-1)
столбец итоговых оценок параметров геометрических преобразований;
А- - операция псевдообращения матрицы;
 - номер элемента с наибольшей невязкой;
- номер элемента с наибольшей невязкой;
 -
-
(m=1, 2,…Мэm)
столбец невязок;
 -
-
(m=1, 2,…,Мэm)
столбец предварительных оценок параметров геометрических преобразований.
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ ДЛЯ ВЫДЕЛЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ В ПОСЛЕДОВАТЕЛЬНОСТИ ТЕЛЕВИЗИОННЫХ ИЗОБРАЖЕНИЙ | 2006 |
|
RU2311684C1 |
| RU 2193825 C2, 27.11.2002 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИДЕНТИФИКАЦИИ И ЛОКАЛИЗАЦИИ В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ ЗОНЫ С ОТНОСИТЕЛЬНЫМ ПЕРЕМЕЩЕНИЕМ В СЦЕНЕ И ДЛЯ ОПРЕДЕЛЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЯ | 1997 |
|
RU2216780C2 |
| US 6005609 A, 21.12.1999 | |||
| US 4574393 A, 04.03.1986. | |||

