Изобретение относится к вооружению, в частности, к системам огневого поражения объектов управляемыми боеприпасами.
Известен способ наведения управляемой ракеты [см., например, 1, стр. 142-143, 2, стр. 69-70], основанный на подсвете цели направленным оптическим излучением, захвате и наведении самонаводящегося боеприпаса (СБП) по отраженному оптическому излучению от цели. Недостатком способа является высокая информативность атаки цели СБП, обусловленная возможностью непосредственной регистрации факта подсвета лазерным целеуказателем (ЛЦУ) на объекте поражения. Так, установка датчиков подсвета на объекте поражения позволяет практически мгновенно регистрировать излучение ЛЦУ и в дальнейшем предпринять меры противодействия в виде ложных источников оптического излучения, приводящих к срыву наведения СПБ.
Известен способ наведения управляемого боеприпаса [см, например, 3], позволяющий повысить помехозащищенность СБП, который основан на подсвете области подстилающей поверхности направленным оптическим излучением, захвате и наведении СБП по отраженному оптическому излучению от области подсвета подстилающей поверхности, выборе минимум двух областей подсвета подстилающей поверхности симметричных относительно координат цели и находящихся в поле зрения самонаводящегося боеприпаса, периодическом осуществлении подсвета направленным оптическим излучением выбранных областей подстилающей поверхности с частотой меньшей обратного значения постоянной времени накопления фотонов оптического излучения фотоприемного устройства СБП. Недостатком способа является высокая вероятность срыва наведения СБП при нахождении в его поле зрения ложных источников оптического излучения (ЛИОИ).
Известен способ наведения управляемого боеприпаса [см., например, 4], позволяющий повысить помехозащищенность СБП, который основан на определении координат цели, подсвете области подстилающей поверхности лазерным излучением, захвате и наведении СБП класса воздух-поверхность по отраженному лазерному излучению от области подсвета подстилающей поверхности, перемещении области подсвета подстилающей поверхности лазерным излучением по заданной относительно координат цели траектории, исключающей подсвет лазерным излучением самой цели, определении параметров наведения СБП на цель, учитывающих параметры траектории перемещения области подсвета подстилающей поверхности лазерным излучением, передачи их значений на СБП. Недостатком способа является высокая вероятность срыва наведения СБП при нахождении в его поле зрения ЛИОИ.
Техническим результатом, на достижение которого направлено предлагаемое изобретение, является повышение помехозащищенности СБП.
Технический результат достигается тем, что в известном способе повышения помехозащищенности управляемого боеприпаса, основанном на определении координат цели, подсвете области местонахождения цели, захвате и наведении СБП по отраженному оптическому излучению от области подсвета, принимают излучения всех оптических источников из района местоположения цели, измеряют их частотные, энергетические, временные и пространственные параметры, по значениям которых определяют N число оптических источников и координаты их местоположения, если N>1, то выделяют из N излучений оптических источников отраженное излучение подсвета цели, а остальные N-1 излучений оптических источников классифицируют как ложные, определяют среди N-1 ложных K число оптических источников, излучение которых по своим параметрам приведет к срыву наведения СБП на цель, формируют подсветом области подстилающей поверхности М число альтернативных ЛИОИ, при этом K=М и каждый m-й альтернативный источник оптического излучения по своим частотным, энергетическим и временным параметрам тождественен каждому k-му ЛИОИ, а по местоположению относительно местоположения области подсвета цели симметрично противоположен.
Поражение объектов может осуществляться управляемыми боеприпасами, использующими для наведения направленное оптическое излучение подсвета цели [см, например, 1, стр. 142-143, 2, стр. 69-70, 3, 4]. Включение в состав комплекса защиты объекта ЛИОИ с характеристиками излучения подсвета ЛЦУ позволяет внести корректировки в траекторию полета СБП и осуществить срыв ее наведения на цель [см., например, 5, стр. 77, 6, стр. 476-483]. Поэтому в интересах повышения помехозащищенности СБП с лазерной головкой самонаведения возникает необходимость уменьшения вероятности срыва наведения при появлении в его поле зрения ЛИОИ. Это может обеспечить «компенсация» оптического излучения ложного источника дополнительным излучением с аналогичными параметрами, но расположенного симметрично в противоположном направлении относительно цели.
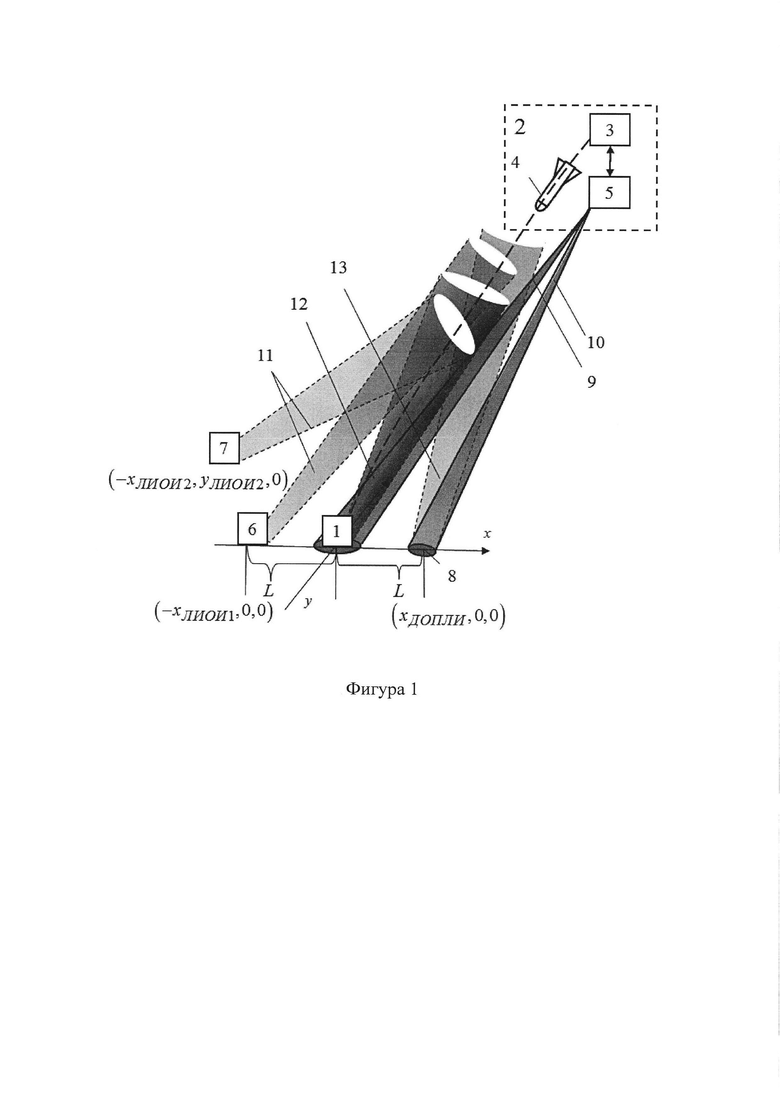
На фигуре 1 представлена схема, поясняющая существо способа (где приняты следующие обозначения: 1 - точка наведения - объект поражения; 2 - комплекс ВТО (КВТО), включающий: носитель-средство запуска СБП 3, СБП 4, ЛЦУ 5; 6, 7 - ЛИОИ; 8 - дополнительная область подсвета, с параметрами ЛИОИ; 9 - луч ЛЦУ; 10 - луч дополнительного подсвета ЛЦУ; 11 - излучение ЛИОИ в направлении КВТО; 12 - отраженное излучение ЛЦУ в направлении комплекса ВТО; 13 - отраженное излучение дополнительного подсвета в направлении КВТО; (-xЛИОИ1,0,0), (-xЛИОИ2,yЛИОИ2,0) - координаты размещения ЛИОИ; (хДОПЛИ,0,0) - координаты области подсвета дополнительным излучением ЛЦУ; L - расстояние между ЛИОИ и областью подсвета ЛЦУ объекта поражения и расстояние между областью подсвета дополнительным излучением ЛЦУ и областью подсвета ЛЦУ объекта поражения).
В соответствии со схемой порядок действий в предлагаемом способе следующий. Для упрощения описания способа, точка наведения - объект поражения 1 размещена в центре декартовой системы координат, а ЛИОИ 6 на оси 0х в точке с координатами (-хЛИОИ1,0,0) на расстоянии L от центра декартовой системы координат, ЛИОИ 7 в точке с координатами (-хЛИОИ2,yЛИОИ2,0). Первоначально КВТО 2 определяет координаты точки наведения - объекта поражения 1. В координаты точки наведения - объекта поражения 1 КВТО 2 наводит ЛЦУ 5, подсвечивает ее лазерным излучением 9 и осуществляет запуск СБП 4. КВТО 2 принимает излучения всех оптических источников с района местоположения объекта поражения 1 и измеряет их частотные, энергетические, временные и пространственные параметры. По значениям параметров КВТО 2 определяет общее N число оптических источников и координаты их расположения в районе размещения объекта поражения 1 (на фигуре 1: N=3, первоначально источниками оптического излучения являются - 12, 6, 7). Если N=1, то на КВТО 2 принимается решение об отсутствии ЛИОИ в районе размещения объекта поражения 1. Если N>1, то КВТО 2 выделяет из N излучений оптических источников отраженное излучение 12 подсвета цели ЛЦУ 5, а остальные N-1 излучений оптических источников классифицирует как ЛИОИ 6, 7 (на фигуре 1: N-1=2). КВТО 2 определяет среди ЛИОИ 6, 7 ЛИОИ 6, излучение 11 которого по своим параметрам приведет к срыву наведения СБП 4 на цель 1 (на фигуре 1: K=1, источником, влияющим на СБП 4, является ЛИОИ 6). Далее КВТО 2 с помощью ЛЦУ 5 на удалении L от координат точки наведения 1 симметрично в противоположном направлении относительно координат расположения центра точки наведения - объекта поражения 1 формирует подсветом 10 области подстилающей поверхности 8 альтернативный источник ЛИОИ 6. Для фигуры 1 координаты (хДОПЛИ,0,0) области подсвета дополнительным излучением ЛЦУ5 есть:
(xДОПЛИ,0,0)=(-хЛИОИ1+2L,0,0).
При этом отраженное излучение 13 от области подсвета 8 по своим частотным, энергетическим и временным параметрам тождественно ЛИОИ 6.
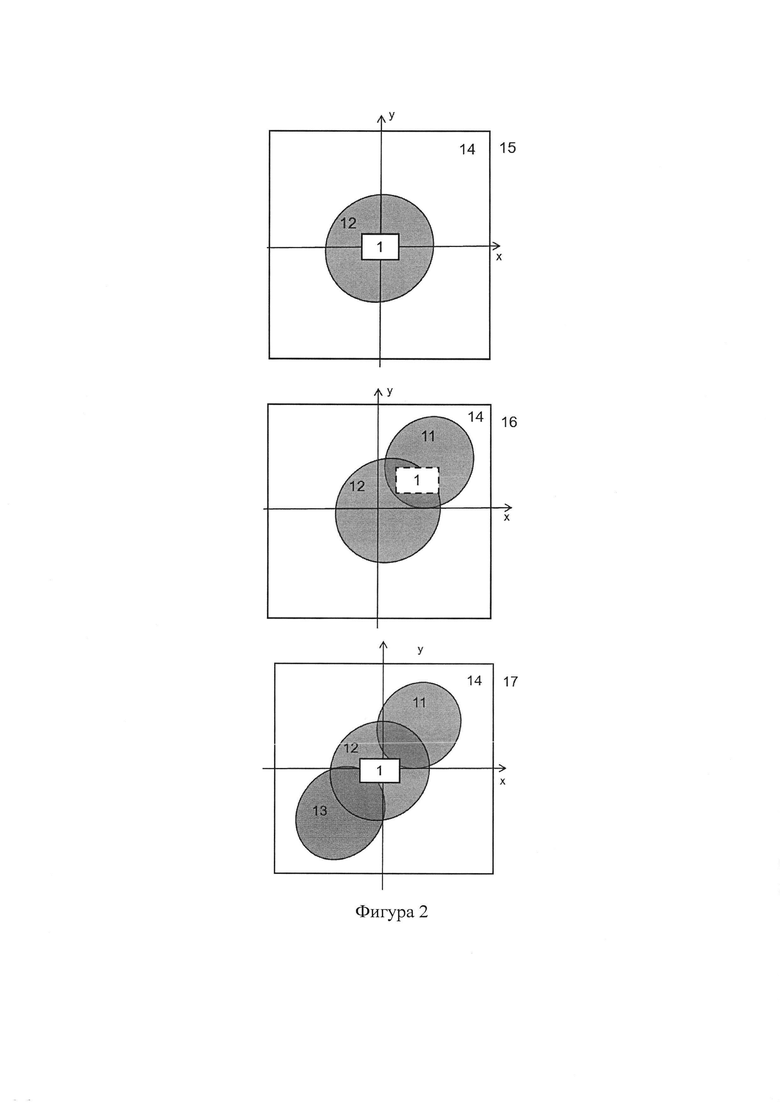
На фигуре 2 представлена схема на примере четырехквадрантного приемника оптического излучения (ПОИ) головки самонаведения, поясняющая функционирования СБП 4 в режиме анализа поступающих изображений в соответствии со способом [см, например, 6, стр. 148-155] (где 14 - фоточувствительная поверхность (ФЧП) четырехквадрантного ПОИ; 11, 13 - (в соответствии с фигурой 1) изображения отраженных сигналов области подсвета цели и дополнительной области подсвета ЛЦУ 5 на ФЧП ПОИ; 11 - (в соответствии с фигурой 1) изображение ЛИОИ 6 на ФЧП ПОИ, 15, 16, 17 - этапы функционирования ПОИ). На этапе 15 СБП 4 принимает отраженное излучение 12 от цели подсвеченной ЛЦУ 5 и на его ФЧП 14 формируется изображение 12. На этом этапе 15, дальнейший алгоритм обработки сигналов ПОИ позволяет наводить СБП 4 на цель 1 с заложенной точностью. На этапе 16 СБП 4 принимает, как излучение 12 ЛЦУ 5, так и излучение 11 ЛИОИ 6. Суммарная обработка их изображений 11, 12 на ФЧП 14 приводит к искажению пеленгационной характеристики цели 1 и соответственно промаху СБП 4. На этапе 17, в соответствии с приведенном выше описанием, формируется дополнительный источник в виде пятна подсвета 8, излучение которого компенсирует искажение изображения истинного подсвета 12 излучением 11 ЛИОИ 6 изображением 13, суммарная обработка которых на ФЧП 14 приводит восстановлению пеленгационной характеристики цели 1 и соответственно наведение на нее СБП 4.
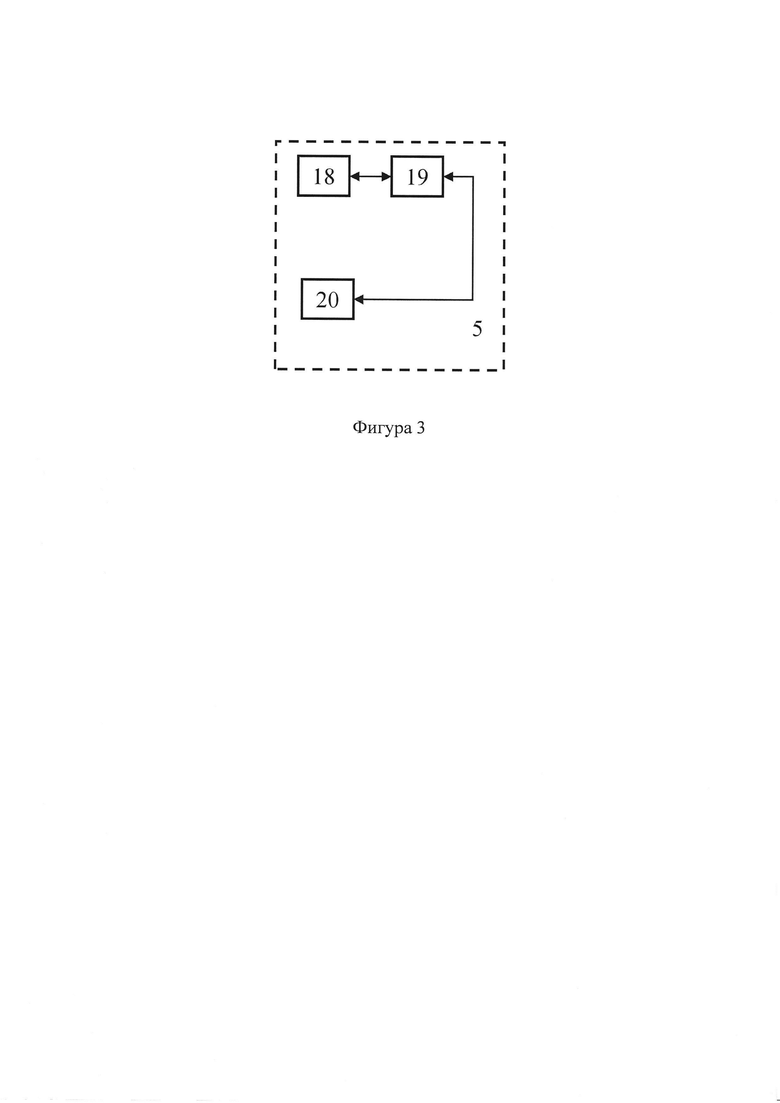
На фигуре 3 представлена блок-схема устройства, с помощь которого может быть реализован способ. Блок-схема устройства содержит: блок обработки и анализа оптических излучений 18, блок управления 19, многоканальный лазер 20, остальные обозначения соответствуют фигуре 1.
Устройство работает следующим образом. После координатной привязки, начала подсвета цели ЛЦУ 5 осуществляет блоком обработки и анализа оптических излучений 18 прием оптических излучений, измерение их параметров и анализ, по результатам которых вырабатывает управляющие сигналы в блок управления 19. Блок управления 19 осуществляет настройку по параметрам многоканальный лазер 20. Многоканальный лазер 20 формирует и излучает дополнительное число оптических сигналов с заданными частотными, энергетическими, пространственными и временным параметрами.
Таким образом, за счет дополнительного подсвета области подстилающей поверхности оптическим излучением с энергетическим, частотными и временным параметрам тождественными ЛИОИ и по местоположению относительно местоположения области подсвета цели симметрично противоположенному, у заявляемого способа появляются свойства повышения эффективности применения СБП на излучение ЛЦУ. Тем самым, предлагаемый способ устраняет недостатки прототипа.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений неизвестен способ помехозащищенности управляемого боеприпаса, основанный на определении координат цели, подсвете области местонахождения цели, захвате и наведении СБП по отраженному оптическому излучению от области подсвета, приеме излучений всех оптических источников из района местоположения цели, измерении их частотных, энергетических, временных и пространственных параметров, определении по значениям которых N числа оптических источников и координат их местоположения, выделении, если N>1, из N излучений оптических источников отраженное излучение подсвета цели, классификации остальных N-1 излучений оптических источников как ложных, определении среди N-1 ложных K числа оптических источников, излучение которых по своим параметрам приведет к срыву наведения СБП на цель, формировании подсветом области подстилающей поверхности М числа альтернативных ЛИОИ, при этом K=М и каждый m-ый альтернативный источник оптического излучения по своим частотным, энергетическим и временным параметрам тождественен каждому к k-ому ЛИОИ, k=m,  а по местоположению относительно местоположения области подсвета цели симметрично противоположен.
а по местоположению относительно местоположения области подсвета цели симметрично противоположен.
Предлагаемое техническое решение практически применимо, так как для его реализации могут быть использованы типовые электротехнические узлы и устройства.
1. Сидорин В.М., Сухарь И.М., Салахов Т.Р., Понамарев В.Г. и др. Средства и системы оптико-электронного подавления. Ч. 1. - М.: Издательство ВВИА им. Проф. Н.Е. Жуковского, 2008, 148 с.
2. Антонов Д.А., Бабич P.M., Балыко Ю.П. и др. Под редакцией Федосова Е.А. Авиация ВВС России и научно-технический прогресс. Боевые комплексы и системы вчера, сегодня, завтра. - М.: Дрофа, 2005, 450 с.
3. Пат. 2660777 RU, МПК F41G 3/00. Способ наведения управляемого боеприпаса / Козирацкий Ю.Л., Козирацкий А.Ю., Кулешов П.Е., Паринов М.Л., Донцов А.А., Балаин С.Е., Нагалин Д.А.; заявитель и патентообладатель ВУНЦ ВВС «ВВА» (г. Воронеж). - 20171103300; заявл. 28.03.2017; опубл. 09.07.2018, Бюл. №19. - 8 с.
4. Пат. 2635299 RU, МПК F41G 9/00. Способ наведения управляемого боеприпаса / Козирацкий Ю.Л., Кулешов П.Е., Паринов М.Л., Балаин С.Е., Левшин Е.А., Донцов А.А.; заявитель и патентообладатель ВУНЦ ВВС «ВВА» (г. Воронеж). - 2016119419; заявл. 19.05.2016; опубл. 09.11.2017, Бюл. №31. - 8 с.
5. Волжин А.В., Сизан И.Г. Борьба с самонаводящимися ракетами. - М.: Воениздат, 1983, стр. 9, Евдокимов В.И., Гумелюк Г.А., Андрющенко М.С. Неконтактная защита боевой техники. - СПб.: Реноме, 2009, 144 с.
6. Юхно П.М. Преднамеренные оптические помехи высокоточному оружию. - М.: ООО «Издательство «Радиотехника», 2017, 640 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОГО БОЕПРИПАСА | 2017 |
|
RU2660777C1 |
| СПОСОБ ПОВЫШЕНИЯ ПОМЕХОЗАЩИЩЕННОСТИ УПРАВЛЯЕМЫХ БОЕПРИПАСОВ С ЛАЗЕРНОЙ СИСТЕМОЙ НАВЕДЕНИЯ | 2020 |
|
RU2755592C1 |
| СПОСОБ НАВЕДЕНИЯ САМОНАВОДЯЩЕГОСЯ БОЕПРИПАСА | 2022 |
|
RU2790052C1 |
| Способ наведения управляемого боеприпаса | 2016 |
|
RU2635299C1 |
| СПОСОБ ЗАЩИТЫ БРОНЕТАНКОВОЙ ТЕХНИКИ | 2008 |
|
RU2373482C2 |
| СПОСОБ ЗАЩИТЫ ОБЪЕКТА ОТ ВЫСОКОТОЧНОГО ОРУЖИЯ С ЛАЗЕРНЫМ НАВЕДЕНИЕМ | 2024 |
|
RU2822806C1 |
| СПОСОБ ПРОТИВОДЕЙСТВИЯ УПРАВЛЯЕМЫМ БОЕПРИПАСАМ | 2015 |
|
RU2593522C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОГО БОЕПРИПАСА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2722711C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОГО БОЕПРИПАСА | 2022 |
|
RU2801294C1 |
| СПОСОБ ВЫСОКОТОЧНОГО ПОРАЖЕНИЯ РАДИОЭЛЕКТРОННЫХ ОБЪЕКТОВ | 2014 |
|
RU2598687C2 |
Изобретение относится к области военной техники и касается способа повышения помехозащищенности управляемого боеприпаса. Способ заключается в определении координат цели, подсвете области нахождения цели, захвате и наведении боеприпаса по отраженному оптическому излучению от области подсвета. При этом принимают излучение всех оптических источников из района нахождения цели, измеряют их частотные, энергетические, временные и пространственные параметры, по значениям которых определяют координаты источников и их местоположение. Из оптических источников выделяют отраженное излучение подсвета цели, а остальные классифицируют как ложные. Среди ложных источников определяют источники, излучение которых может привести к срыву наведения боеприпаса на цель, и формируют подсветом области подстилающей поверхности источники излучения, альтернативные этим ложным источникам. При этом каждый альтернативный источник оптического излучения по своим частотным, энергетическим и временным параметрам тождественен соответствующему ложному источнику оптического излучения, а по положению относительно местоположения области подсвета цели симметрично противоположен. Технический результат заключается в повышении помехозащищенности управляемого боеприпаса. 3 ил.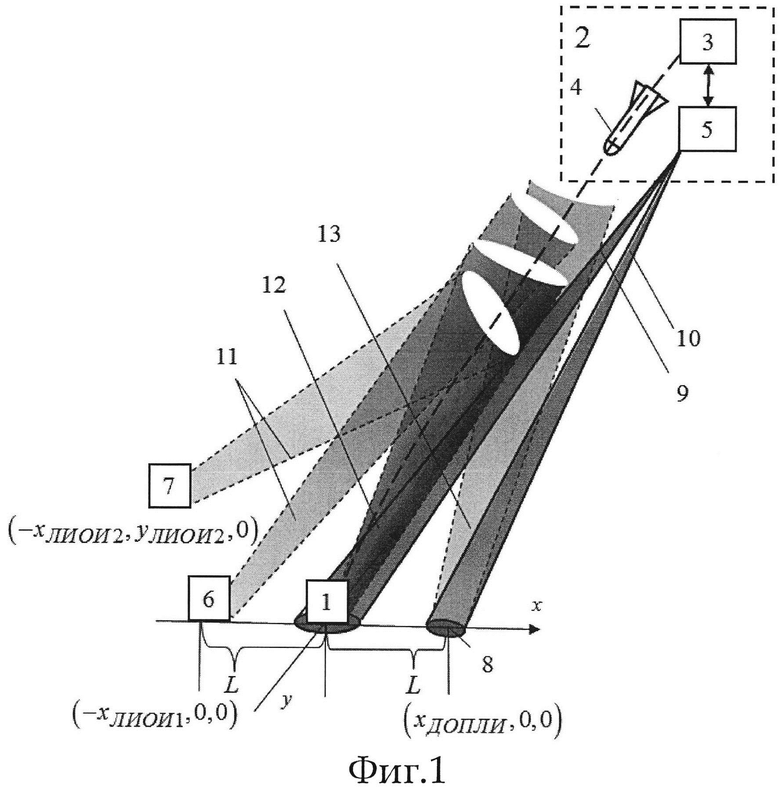
Способ повышения помехозащищенности управляемого боеприпаса, заключающийся в определении координат цели, подсвете области местонахождения цели, захвате и наведении самонаводящегося боеприпаса по отраженному оптическому излучению от области подсвета, отличающийся тем, что принимают излучения всех оптических источников из района местоположения цели, измеряют их частотные, энергетические, временные и пространственные параметры, по значениям которых определяют N число оптических источников и координаты их местоположения, если N>1, то выделяют из N излучений оптических источников отраженное излучение подсвета цели, а остальные N-1 излучений оптических источников классифицируют как ложные, определяют среди N-1 ложных K число оптических источников, излучение которых по своим параметрам приведет к срыву наведения самонаводящегося боеприпаса на цель, формируют подсветом области подстилающей поверхности М число альтернативных ложным источников оптического излучения, при этом K=М и каждый m-й альтернативный источник оптического излучения по своим частотным, энергетическим и временным параметрам тождественен каждому k-му ложному источнику оптического излучения, k=m,  а по местоположению относительно местоположения области подсвета цели симметрично противоположен.
а по местоположению относительно местоположения области подсвета цели симметрично противоположен.
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОГО БОЕПРИПАСА | 2017 |
|
RU2660777C1 |
| Способ наведения управляемого боеприпаса | 2016 |
|
RU2635299C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2290592C1 |
| US 5601255 A1, 11.02.1997. | |||

