Изобретение относится к области радиолокационной метеорологии и может быть использовано как в гражданской, так и в военной метеорологии для коррекции значения энергетического потенциала наземных и бортовых радаров.
Известны различные способы контроля и коррекции энергетического потенциала радара следующими методами:
- по величине отраженного сигнала от местных предметов;
- путем раздельного измерения технических параметров радара;
- с помощью стандартного отражателя;
- с помощью контрольного резонатора (эхо-камеры).
(Латинский С.М., Шарапов В.И., Ксендз С.П., Афанасьев С.С. Теория и практика эксплуатации радиолокационных систем под ред. Латинского С.М. - М.: Советское радио, 1970, с.30-36).
К недостаткам известных способов можно отнести низкую точность измерений, обусловленную влиянием неконтролируемых факторов и сложность их реализации на практике.
Наиболее близким к заявляемому объекту является способ коррекции энергетического потенциала радара по стандартной токопроводящей мишени, у которой значение поперечного сечения обратного рассеяния известно (Руководство по применению радиолокаторов МРЛ-4, МРЛ-5 и МРЛ-6. / М.Т.Абшаев, И.И.Бурцев, С.И.Ваксенбург, Г.Ф.Шевела. - Л.: Гидрометеоиздат, 1980, с.138-145. Прототип).
На практике при определении энергетического потенциала радара осуществляют его калибровку по стандартной мишени. Смысл калибровки радара по стандартной мишени сводится к определению энергетического его потенциала, что позволяет в дальнейшем измерять радиолокационную отражаемость цели относительно известного поперечного сечения обратного рассеяния токопроводящей мишени.
При калибровке радара по известному способу используется стандартная мишень в виде металлизированной сферы диаметром не менее 30,5 см. При калибровке радара стандартную мишень устанавливают на расстоянии 3-10 км от радара и поднимают с помощью специального троса на высоту 500-1000 метров над поверхностью земли. Для этой цели, как правило, используют шары-пилоты, а сам процесс осуществляется в безветренную погоду. Затем путем радиолокационного зондирования определяют расстояние до мишени и мощность радиоэхо на приемном конце радара. После чего определяют значение энергетического потенциала радара (Сλ) по известной формуле.
Существенным недостатком известного способа является то, что под воздействием ряда неконтролируемых факторов величина (Сλ) не является постоянной, а сама процедура его измерения сопряжена со значительными трудозатратами, т.к. требует специального транспорта, лебедки, удерживающей шаро-пилот на высоте 500-1000 м с помощью специального троса. Кроме того, рельеф подстилающей поверхности и климатические условия (снег, грязь, туман, ветер) не всегда обеспечивают возможность коррекции значения (Сλ) таким способом. Поэтому на практике данную процедуру выполняют один раз в течение года, а затем при эксплуатации радара осуществляют периодически коррекцию величины (Сλ) по реперным целям (гора, различные искусственные возвышения и т.д.). Однако осуществлять регулярно в оперативном режиме коррекцию величины (Cλ) по реперным целям в каждом цикле измерения не представляется возможным. В результате существенно снижается точность радиолокационных измерений.
Техническим результатом от использования заявленного технического решения является повышение точности радиолокационных измерений путем коррекции энергетического потенциала радара в каждом цикле измерения.
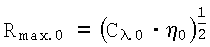
Технический результат достигается тем, что в известном способе коррекции энергетического потенциала радара с использованием калибровочной мишени наряду с существующим реальным радиолокационным каналом формируют виртуальный опорный канал с заданным значением энергетического потенциала радара (Сλo), и калибровочной мишенью, в качестве которой используют виртуальную облачную среду с заведомо известным уровнем радиолокационной отражаемости (ηo), затем при коррекции энергетического потенциала радара в реальном канале осуществляют зондирование облачной среды, в котором выделяют локальный исследуемый объем и с экрана радара для данного объема, используя огибающую видеоимпульса, определяют максимальное значение интенсивности эхо-сигнала под огибающей видеоимпульса (ZR.1), расстояние до облачной среды (R1), соответствующее этому значению, максимальное значение интенсивности эхо-сигнала (Zmax.1) от локального исследуемого объема на удалении его от радара, равном единичному расстоянию (Re) в 1 км, и протяженность проекции огибающей видеоимпульса (ΔR1) на ось расстояний, после этого для виртуального опорного канала, где задано значение энергетического потенциала радара (Сλ.o) и значение радиолокационной отражаемости виртуальной облачной среды (ηo), расчетным путем определяют максимальную дальность аппаратурного контакта (Rmax.o) по формуле
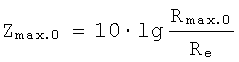
затем для данного канала, используя найденное значение (Rmax.o), определяют максимальное значение интенсивности эхо-сигнала (Zmax.o) от виртуальной облачной среды, на удалении его от радара, равном единичному расстоянию (Re) в 1 км, по формуле
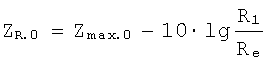
и максимальное значение интенсивности эхо-сигнала (ZR.0), соответствующее найденному в реальном канале расстоянию (R1), по формуле
после чего, используя полученные значения ZR.0, Zmax.0 и Zmax.1, определяют протяженность проекции огибающей видеосигнала на ось расстояний в виртуальном эталонном канале (ΔRo) по формуле
и, используя значения найденных величин (ΔRo, ΔR1, Zmax.o и ZR.1), находят разность электромагнитной плотности облачной среды между виртуальным опорным и реальным каналами (ΔD), по формуле
после этого осуществляют коррекцию энергетического потенциала радара (Сλ.1), определяя истинное его значение по формуле
Технический результат достигается и тем, что максимальное значение интенсивности эхо-сигнала (Zmax.1) на расстоянии (Re) от радара в реальном канале определяют по формуле
Технический результат достигается также и тем, что при определении проекции огибающей видеоимпульса на ось расстояний в каждом канале берется начальный участок огибающей эхо-сигнала, ограниченный максимумом интенсивности эхо-сигнала.
Предлагаемый способ коррекции энергетического потенциала радара имеет значительные преимущества в сравнении с известными способами, что позволяет существенно повысить точность радиолокационных измерений без использования сложных калибровочных мишеней.
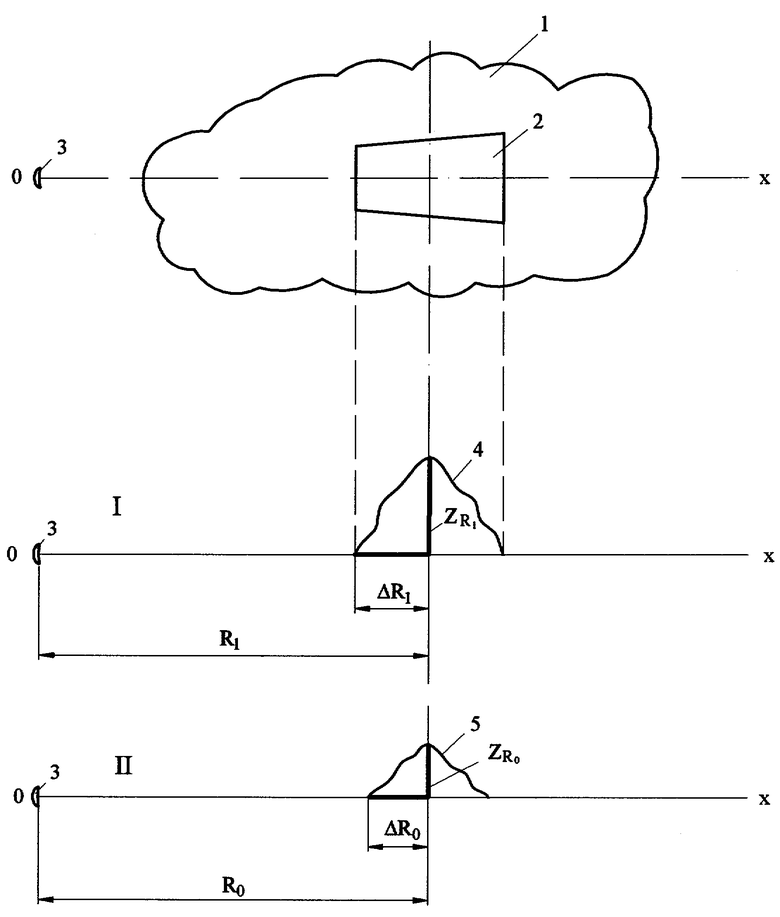
Сущность изобретения поясняется чертежом, где схематически представлена система, реализующая предлагаемый способ.
На чертеже схематически изображено облако 1, в котором выделена локальная исследуемая область 2 облачной среды. Реальный канал обозначен позицией I, а виртуальный эталонный канал - позицией II. Радар в каналах I и II обозначен позицией 3. В реальном канале I видеосигнал, принятый от локальной исследуемой области 2, схематически представлен в виде огибающей 4, а в виртуальном опорном канале II - в виде огибающей 5. Максимальные значения интенсивности эхо-сигнала под огибающими 4 и 5 в каналах I и II обозначены, соответственно, через (ZR.1) и (ZR.0), а расстояние от радара 3 до центральной части локальной области 2 в каналах обозначены соответственно через R1 и R0.
Проекции огибающих эхо-сигналов 4 и 5 на ось расстояний (о-х) в реальном I и виртуальном опорном канале II обозначены соответственно через ΔR1 и ΔR0.
При определении проекций огибающих эхо-сигнала ΔR1 и ΔR0 берутся начальные участки огибающих 4 и 5, ограниченные максимальными уровнями интенсивности эхо-сигнала под огибающими (ZR.1) и (ZR.0). На чертеже участки ΔR1 и ΔR0, а также максимальные уровни интенсивности эхо-сигнала под огибающими (ZR.1) и (ZR.0) выделены жирной линией.
Способ коррекции энергетического потенциала радара реализуется следующим образом.
Предварительно наряду с существующим реальным радиолокационным каналом (I) формируют виртуальный опорный канал (II) с заданным значением энергетического потенциала радара (Сλo), в котором в качестве калибровочной мишени используют виртуальную облачную среду, с заведомо известными уровнем радиолокационной отражаемости (ηo). Затем для коррекции энергетического потенциала радара (Сλ.1) в реальном канале (I) осуществляют зондирование облака 1, в котором затем выделяют локальный исследуемый объем облачной среды 2. После этого с экрана радара 3 определяют максимальное значение интенсивности эхо-сигнала (ZR.1) под огибающей видеоимпульса 4, и расстояние (R1) до этого уровня в облачной среде. Одновременно определяют и максимальное значение интенсивности эхо-сигнала (Zmax.1) на удалении локального исследуемого объема 2 от радара в 1 км, и протяженность проекции огибающей видеоимпульса (ΔR1) на ось расстояний (о-х). Затем для виртуального опорного канала (II), где заданы значения энергетического потенциала радара (Сλ.o) и радиолокационная отражаемость виртуальной облачной среды (ηo), расчетным путем определяют максимальную дальность аппаратурного контакта (Rmax.o), максимальную интенсивность эхо-сигнала (Zmax.o) на удалении локального исследуемого объема 2 от радара в 1 км, и максимальное значение интенсивности эхо-сигнала (ZR.0), соответствующее найденному в реальном канале расстоянию (R1). Затем, используя полученные значения ZR.0, Zmax.0 и Zmax.1, определяют протяженность проекции огибающей видеосигнала на ось расстояний (ΔRo) и разность электромагнитной плотности облачной среды (ΔD) между виртуальным опорным и реальным каналами. Затем осуществляют коррекцию энергетического потенциала радара (Сλ.1), определяя истинное его значение по формуле
Пример конкретного выполнения способа.
В качестве примера приводится результат коррекции энергетического потенциала (Сλ.1) метеорологического радара типа МРЛ-5, имеющего в штатном режиме Сλ.1=1026 см3 и длину волны излучения λ=10 см.
Для коррекции энергетического потенциала радара (Сλ.1) в реальном канале (I) осуществлялось радиолокационное зондирование облака 1, в котором затем был выделен исследуемый локальный объем 2, создающий в точке приема эхо-сигнал со следующими параметрами:
R1=30 км; ZR.1=25 дБ (в одном направлении движения электромагнитной волны); ΔR1=5 км. Данные значения R1, ZR и ΔR1, определенные с экрана радара с использованием огибающей эхо-сигнала 4, являются исходными для рассматриваемого канала (I).
Исходные данные для виртуального опорного канала (II): Сλ.0=1026 см3 и ηo=10-8 см-1. Значения Сλ.0 и ηo в данном канале приняты соответствующими порядку величин, наблюдаемых на практике.
Используя исходные данные, определяем:
Для реального канала.
Максимальное значение интенсивности эхо-сигнала от локального исследуемого объема облачной среды на удалении его от радара в 1 км

Для опорного канала.
1. Максимальную дальность аппаратурного контакта (Rmax.o), по формуле

2. Максимальное значение интенсивности эхо-сигнала (Zmax.o), по формуле

3. Максимальное значение интенсивности эхо-сигнала (ZR.0) для найденного в реальном канале расстояния (R1) по формуле

Затем, используя полученные выше значения ZR.0, Zmax.0 и Zmax.1, определяем протяженность проекции огибающей видеосигнала на ось расстояний (ΔRo) в виртуальном эталонном канале по формуле

После этого, используя найденные значения (ΔR1), (ΔR0), (Zmax.1) и (ZR.1), находим разность электромагнитной плотности облачной среды (ΔD) между виртуальным опорным (II) и реальным (I) каналами, по формуле

а затем осуществляем коррекцию энергетического потенциала радара (Сλ.1), определяя истинное его значение по формуле

Использование в качестве стандартной калибровочной мишени виртуальной облачной среды с заведомо известными параметрами позволяет осуществлять контроль энергетического потенциала радара в оперативном режиме и в каждом цикле измерения. При этом учитываются все погрешности, в том числе и погрешности, обусловленные влиянием неконтролируемых факторов, что обеспечивает высокую точность радиолокационных измерений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ РАДИОЛОКАЦИОННОЙ ОТРАЖАЕМОСТИ ОБЛАЧНОЙ СРЕДЫ | 2007 |
|
RU2374664C2 |
| СПОСОБ ИЗМЕРЕНИЯ ЭЛЕКТРОМАГНИТНОЙ ПЛОТНОСТИ ОБЛАЧНОЙ СРЕДЫ | 2007 |
|
RU2374663C2 |
| СПОСОБ ИЗМЕРЕНИЯ ОСЛАБЛЕНИЯ РАДАРНОГО ИЗЛУЧЕНИЯ ОБЛАКАМИ И ОСАДКАМИ | 2009 |
|
RU2414723C1 |
| СПОСОБ РАННЕГО ОБНАРУЖЕНИЯ АТМОСФЕРНЫХ ВИХРЕЙ В ОБЛАКАХ НЕКОГЕРЕНТНЫМ РАДАРОМ | 2012 |
|
RU2503030C1 |
| СПОСОБ РАЗЛИЧЕНИЯ СЛУЧАЙНЫХ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 1998 |
|
RU2137151C1 |
| СПОСОБ ИЗМЕРЕНИЯ ОСАДКОВ | 1995 |
|
RU2097798C1 |
| СПОСОБ ОДНОВОЛНОВОГО РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ ЗАРЯДА ОБЛАКОВ И ОСАДКОВ | 2015 |
|
RU2600170C1 |
| Способ определения параметров пространственного распределения отражателей в объемной цели | 1990 |
|
SU1800416A1 |
| МЕТЕОРОЛОГИЧЕСКАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2014 |
|
RU2574167C1 |
| Способ обеспечения воздушных судов метеорологической информацией | 2017 |
|
RU2672040C2 |
Изобретение может быть использовано как в гражданской, так и в военной метеорологии для коррекции энергетического потенциала наземных и бортовых радаров без использования сложных калибровочных мишеней. Достигаемый технический результат - повышение точности радиолокационных измерений путем коррекции энергетического потенциала радара в каждом цикле измерений. Согласно способу, наряду с существующим реальным радиолокационным каналом формируют виртуальный опорный канал с заданным значением энергетического потенциала радара, и калибровочной мишенью, в качестве которой используют виртуальную облачную среду с заведомо известным уровнем радиолокационной отражаемости. При коррекции энергетического потенциала радара осуществляют зондирование облачной среды, в результате которого определяют расстояние до исследуемого локального объема облака, затем находят проекцию огибающей видеоимпульса на ось расстояний, соответственно, в реальном и опорном каналах, после этого методом вычислений находят разность электромагнитной плотности облачной среды между виртуальным опорным и реальным каналами, а затем осуществляют коррекцию энергетического потенциала радара, определяя истинное его значение по соответствующей вычислительной формуле. 2 з.п. ф-лы, 1 ил.
1. Способ коррекции энергетического потенциала радара с использованием калибровочной мишени, отличающийся тем, что наряду с существующим реальным радиолокационным каналом формируют виртуальный опорный канал с заданным значением энергетического потенциала радара (Сλ0) и калибровочной мишенью, в качестве которой используют виртуальную облачную среду с заведомо известным уровнем радиолокационной отражаемости (η0), затем при коррекции энергетического потенциала радара в реальном канале осуществляют зондирование облачной среды, в котором выделяют локальный исследуемый объем, и с экрана радара для данного исследуемого объема определяют максимальное значение интенсивности (ZR.1) эхо-сигнала под огибающей видеоимпульса, расстояние до облачной среды (R1), соответствующее этому значению, максимальное значение интенсивности эхо-сигнала (Zmax.1) от локального исследуемого объема на удалении его от радара, равном единичному расстоянию (Re) в 1 км, и протяженность проекции огибающей видеоимпульса (ΔR1) на ось расстояний, после этого для виртуального опорного канала, где задано значение энергетического потенциала радара (Сλ0) и значение радиолокационной отражаемости виртуальной облачной среды (η0), расчетным путем определяют максимальную дальность радара до локального исследуемого объема зондируемой облачной среды (Rmax.0) по формуле
 ,
,
затем для данного канала, используя найденное значение (Rmax.0), определяют максимальное значение интенсивности эхо-сигнала (Zmax.0) от виртуальной облачной среды, на удалении его от радара, равном единичному расстоянию (Re) в 1 км, по формуле
 ,
,
и максимальное значение интенсивности эхо-сигнала (ZR.0), соответствующее найденному в реальном канале расстоянию (R1), по формуле
 ,
,
после чего, используя полученные значения ZR.0, Xmax.0 и Zmax.1, определяют протяженность проекции огибающей видеосигнала на ось расстояний в виртуальном опорном канале (ΔR0) по формуле
 ,
,
затем, используя значения найденных величин (ΔR0, ΔR1, Zmax.0 и ZR.1), находят разность электромагнитной плотности облачной среды между виртуальным опорным и реальным каналами (ΔD) по формуле
 ,
,
после этого осуществляют коррекцию энергетического потенциала радара (Сλ.1), определяя истинное его значение по формуле
2. Способ коррекции энергетического потенциала радара по п.1, отличающийся тем, что максимальное значение интенсивности эхо-сигнала (Zmax.1) на расстоянии (Re) от радара в реальном канале определяют по формуле
 .
.
3. Способ коррекции энергетического потенциала радара по п.1, отличающийся тем, что при определении проекции огибающей видеоимпульса на ось расстояний в каждом канале берется начальный участок огибающей эхо-сигнала, ограниченный максимумом интенсивности эхо-сигнала.
| АБШАЕВ М.Т | |||
| и др | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| - Л.: Гидрометеоиздат, 1980, с.138-145 | |||
| УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ ФАЗЫ ПЕРЕДАВАЕМОГО ПО ВОЛС ВЫСОКОЧАСТОТНОГО АНАЛОГОВОГО СИГНАЛА | 1997 |
|
RU2119719C1 |
| АППАРАТ ДЛЯ РАЗЛИВКИ ГУСТЫХ ЖИДКОСТЕЙ | 1930 |
|
SU22560A1 |
| УСТАНОВКА-ИМИТАТОР ОТРАЖЕННЫХ СИГНАЛОВ МАЛЫХ ДАЛЬНОСТЕЙ | 2004 |
|
RU2275653C1 |
| АВИАЦИОННЫЙ МЕТЕОРОЛОГИЧЕСКИЙ КОМПЛЕКС ДЛЯ АКТИВНЫХ ВОЗДЕЙСТВИЙ НА ОБЛАКА | 2002 |
|
RU2213984C1 |
| US 3491358 А, 20.01.1970 | |||
| РЕЖЕКТОРНЫЙ ФИЛЬТР ЧЕТВЕРТОГО ПОРЯДКА | 2020 |
|
RU2749400C1 |
| US 4015257 А, 29.03.1977. | |||

