Область техники
Изобретение относится к радиолокационной метеорологии, а конкретно, к метеообеспечению авиации и может быть использовано для автоматизированного обеспечения в режиме реального времени во время полета воздушных судов всех классов метеорадиолокационной и другой дополнительной метеорологической информацией по трассе полета в поле действия наземных сетей метеорадиолокаторов и других дистанционных измерителей метеорологических параметров.
Уровень техники
В настоящее время в авиации общепринятым является способ радиолокационного обзора атмосферы по курсу полета летательного аппарата с использованием бортовых метеонавигационных радиолокаторов (МНРЛ) Гроза-М, Буран, и др. [Данилов С.Н., Иванов А.В., Москвитин С.П. Самолетный метеонавигационный радиолокатор: МУ. -Тамбов: ТГТУ, 2012. -24 с.; https://ru.wikipedia.org/wiki/авиационные РЛС].
Известен способ метеорадиолокационного обзора атмосферы с использованием метеонавигационной радиолокационной станции, «КОНТУР-10Ц», установленной непосредственно на борту воздушного судна [Метеонавигационная радиолокационная станция «Контур-10Ц» ООО Контур НИИРС, e-mail: public@kontur-niirs.ru]. Обзор производится в секторе горизонтальной и вертикальной плоскостей ~ 5 градусов со сканированием в секторе ~180° азимутальной плоскости направления полета. При этом производится обнаружение облаков, облачных систем и зон опасной турбулентности, строится вертикальный профиль облачности в секторе сканирования.
Недостатки этого способа: вследствие широкой диаграммы направленности антенны снижается пространственное разрешение, происходит сглаживание турбулентных неоднородностей; максимум отражаемости радиоэхо принимается за источник формирования грозовых зарядов, тогда как исследования показывают, что грозовые разряды часто отмечаются в зоне слабого радиоэхо, а иногда и за ее пределами; отсутствие кругового обзора затрудняет выход борта из грозоопасной зоны без оценки структуры и масштаба атмосферного процесса; точность определения высоты верхней границы облаков имеет большие погрешности, не решена задача обхода облачности по высоте; происходит искажение информации бортовой РЛС при сканировании, вследствие расширения диаграммы направленности антенны и появления боковых лепестков на крайних углах сканирования; установление четких границ облачности возможно лишь в дальней зоне формирования фронта электромагнитной волны антенны РЛС.
Наиболее близким, к заявляемому, является способ, принятый за прототип, передачи на борт самолета наземной радиолокационной метеорологической информации во время выполнения авиационных работ по активным воздействиям на облака и осадки с использованием наземного метеорологического радиолокатора [А.А. Бычков, Б.П. Колосков, В.П. Корнеев, А.В. Шаповалов, Г.Г. Щукин, С.В. Мельник, A.M. Захаров, М.В. Белоусов. Автоматизированный метеорологический радиолокационный комплекс «АМРК-АТТЕХ». Труды XXIV Всероссийской научной конференции распространение радиоволн РРВ-24, Иркутск, 29 июня-5 июля 2014 г. стр.152-155.]. С помощью наземного метеорологического радиолокатора и программного обеспечения производится: обнаружение и отображение на мониторе наземного командного пункта метеоинформации о полях облачности и осадках, определение их характеристик. Система радиообмена данными «Земля-борт-Земля» обеспечивает по радиозапросам с Земли прием с самолетов метеоданных о состоянии атмосферы в районе работ и их местоположении по сигналам GPS. Также по радиоканалу производится передача радиолокационных карт облачности и осадков для руководителей воздействия, работающих непосредственно на бортах.
Недостатком этого способа является то, что радиолокационные карты облачности и осадков передаются на борт воздушного судна лишь эпизодически, что необходимо для проведения работ по активным воздействиям на облака, но для выполнения навигационных задач при полетах в сложных метеорологических условиях этих сведений явно недостаточно. Данные об облачности и осадках берутся только от одного радиолокатора, установленного в районе работ, чего недостаточно для выполнения трассовых полетов.
Отображение радиолокационной метеорологической информации происходит простым переносом сечения метеорадиоэхо, зафиксированного наземной станцией, и обозначения на его фоне местоположения ЛА, зафиксированного на момент запроса с Земли.
Отображаемые метеорадиоэхо стационарны и не связываются с местоположением ЛА в пространстве, не меняется их форма отображения в зависимости от удаленности ЛА от метеообъектов.
В этом способе аппаратурно-программный комплекс отображает сечения радиоэхо лишь на уровне и в зоне проведения воздействия, а конфигурация облачности в других местах остается неизвестной.
Кроме того, в составе описываемого аппаратурно-программного комплекса отсутствуют датчики дополнительной метеорологической информации, позволяющих повысить вероятность обнаружения особоопасных метеорологических явлений: грозы, града, турбулентности, наличия крупных гидрометеоров (крупа, ливень, зоны интенсивного обледенения).
Раскрытие изобретения
Задачей предлагаемого изобретения является повышение безопасности полета воздушных судов за счет увеличения информативности, достоверности, наглядности отображения метеорадиолокационных и других метеорологических данных во время полета летательных аппаратов в сложных метеорологических условиях, а также упрощение конструкции, удешевление монтажа, увеличение надежности аппаратуры, повышение грузоподъемности воздушного судна.
Поставленная задача решается следующим образом.
Информация о состоянии атмосферы по трассе полета формируется на основе данных от сети наземных радиолокационных метеорологических станций и других дистанционных источников метеорологической информации, собирается в пределах зоны контролируемого воздушного пространства, предварительно обрабатывается и стандартными методами по запросу бортового процессора в автоматическом режиме передается на борт воздушного судна во время полета.
Принятый на борту радиосигнал декодируют и, вместе с данными приемника позиционирования воздушного судна о скорости перемещения, направлении и местоположении воздушного судна в режиме реального времени, обрабатывают бортовым процессором по выбранному пилотом алгоритму. Затем информацию отображают на бортовом мониторе в виде различных сечений радиоэхо облаков, с отметками на их фоне обнаруженных метеорологических явлений из данных обработки и источников дистанционной метеоинформации, уже относительно местоположения и направления полета самого воздушного судна.
Полученные результаты с высоким разрешением метеообстановки могут отображаться одновременно для нескольких высот полета воздушного судна в виде горизонтальных, круговых и вертикальных, в выбранных направлениях, сечений радиоэхо облаков, с индикацией верхней и нижней границ облачности, зон повышенной водности, турбулентности, воздушных потоков, зон локализации ледяных частиц, зон крупнокапельной фракции гидрометеоров, электрических зарядов и др., что обеспечивает высокую надежность и качество штормооповещения.
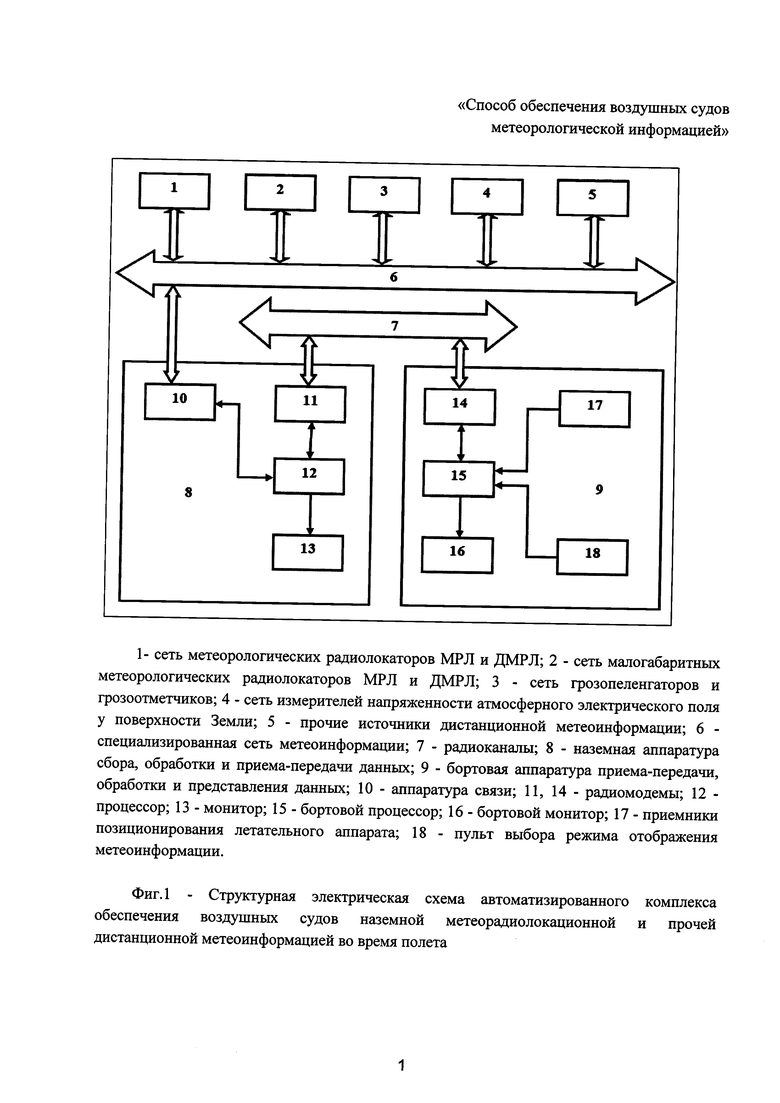
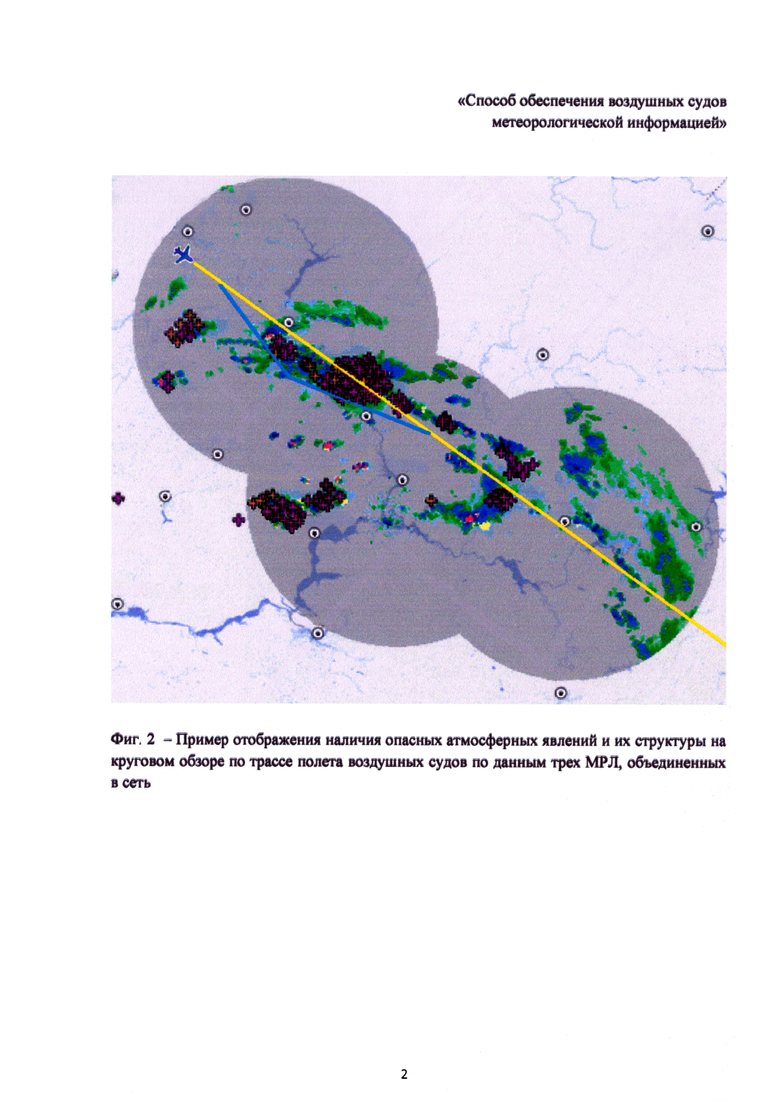
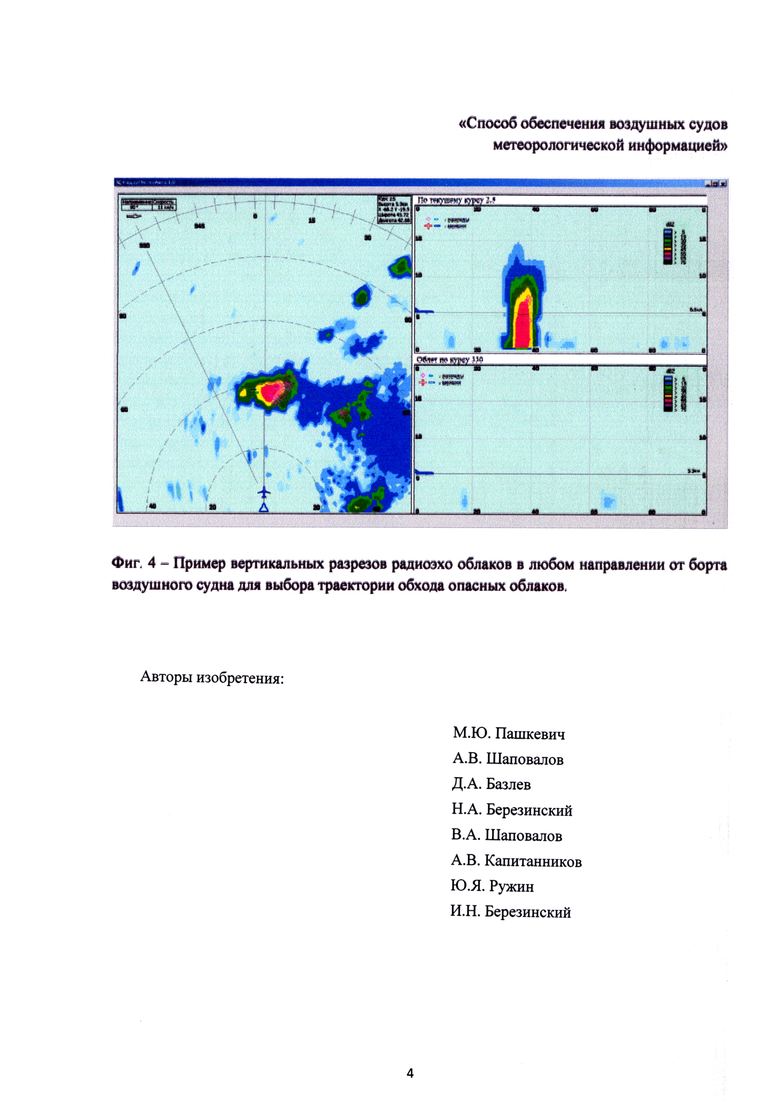
Перечень фигур, поясняющих реализацию способа автоматизированного обеспечения воздушных судов наземной радиолокационной и дополнительной метеорологической информацией: фигура 1 - Структурная электрическая схема автоматизированного комплекса обеспечения воздушных судов наземной радиолокационной метеорологической информацией во время полета; фигура 2 - Пример отображения наличия опасных атмосферных явлений и их структуры на круговом обзоре по трассе полета воздушного судна по данным трех МРЛ, объединенных в сеть; фигура 3 - Пример перехода от наклонных обзоров по лучу РЛС к горизонтальным сечениям и отображение метеообстановки одновременно на нескольких сечениях радиоэхо по высоте; фигура 4 - Пример вертикальных разрезов радиоэхо облаков в любом направлении от борта воздушного судна для выбора траектории обхода опасных облаков.
Пример структурной электрической схемы автоматизированного комплекса обеспечения воздушных судов наземной метеорадиолокационной и прочей дистанционной метеоинформацией во время полета, привязанной к скорости перемещения, направлению и местоположению воздушного судна, отображен на фигуре 1. Комплекс включает в себя следующие блоки и устройства:
1 - сеть метеорологических радиолокаторов МРЛ и ДМРЛ; 2 - сеть малогабаритных метеорологических радиолокаторов МРЛ и ДМРЛ; 3 - сеть грозопеленгаторов и грозоотметчиков; 4 - сеть измерителей напряженности атмосферного электрического поля у поверхности Земли; 5 - прочие источники дистанционной метеоинформации; 6 - специализированная сеть метеоинформации; 7 - радиоканалы; 8 - наземная аппаратура сбора, обработки и приема-передачи данных; 9 - бортовая аппаратура приема-передачи, обработки и представления данных; 10 - аппаратура связи; 11, 14 - радиомодемы; 12 -процессор; 13 - монитор; 15 - бортовой процессор; 16 - бортовой монитор; 17 - приемники позиционирования летательного аппарата; 18 - пульт выбора режима отображения специализированной метеоинформации.
Информация, поступившая с наземных радиолокационных метеорологических сетей (1, 2), сети грозопеленгаторов и грозоотметчиков (3), сети измерителей напряженности электрического поля у поверхности Земли (4) и других дистанционных источников метеорологической информации (5), в цифровом виде по стандартным каналам радиосвязи поступает на вход специализированной сети метеоинформации (6). Там она формируется во временную последовательность файлов и по стандартному каналу связи поступает на вход наземного блока аппаратуры сбора, обработки и передачи данных (8). С выхода аппаратуры связи (10) сигнал поступает на вход процессора (12), где вся информация обрабатывается определенным образом для передачи через наземный модем (11) по радиоканалу (7) в бортовой модем (14) воздушного судна и далее на вход бортового процессора (15). Монитор (13) необходим для контроля сигналов при настройке программно-аппаратных средств, а также для индикации информационных потоков.
Аппаратура автоматизированной обработки, установленная на борту воздушного судна, входит в состав блока (9) бортовой аппаратуры приема, обработки и представления данных. Вся информация с выхода модема (14) поступает на первый порт бортового процессора (15). На второй и третий порты бортового процессора (15) соответственно подается информация с приемника позиционирования воздушного судна (17) о его местоположении в пространстве, и цифровой код, определяющий режим обработки и отображения метеорологической информации на бортовом индикаторе (16). Цифровой код, поступающий на третий порт бортового процессора, формируется в пульте выбора режима отображения (18), задаваемого пилотом.
Поступающая с наземных РЛС информация на первый порт бортового процессора предварительно сформирована в виде отдельных файлов, удобных для дальнейшей обработки и объемно представляет собой информацию о трехмерной структуре радиоэхо облаков и метеоявлений, расположенных в зоне действия радиолокационной сети.
Радиолокационная метеорологическая информация отображается на бортовом индикаторе в различных видах, которые задает пилот с помощью пульта выбора режима обработки и отображения (18).
В отличие от штатного варианта бортовой РЛС, радиолокационная метеорологическая информация от наземной РЛС отображается не только в секторе по направлению полета борта, но и в режиме кругового обзора относительно местоположения и направления полета самого летательного аппарата. По выбору пилота, отображается метеообстановка на различных эшелонах полета ЛА с включением специфических данных, например, верхней или нижней границ облачности, что значительно облегчает выбор варианта маневра для выхода из зоны опасной метеорологической обстановки или для ее облета и т.д.
Кроме того, вследствие технического преимущества наземного МРЛ - высокий потенциал, узкая диаграмма направленности антенны, использование допплеровского и поляризационного режимов - имеются возможности восстановления ослабления электромагнитной волны в мощных радиоэхо, привлечение данных о грозо-градовых характеристиках облачности, турбулентных неоднородностях, сдвигах ветра и т.д. - на индикаторе летательного аппарата может отображаться различная дополнительная метеорологическая информация по выбору пилота. Предупреждение о приближении воздушного судна к опасному метеорологическому объекту автоматически выдается пилоту световыми и звуковыми сигналами.
Осуществление изобретения
В настоящее время, в связи с ростом числа случаев и величины наносимого ущерба от опасных атмосферных явлений, кроме космического мониторинга земной поверхности во всем мире, в том числе и в России, функционируют и создаются новые глобальные и региональные радиолокационные метеорологические сети. В России производится расширение существующей радиолокационной сети и замена устаревших метеорадиолокаторов МРЛ-5 современными доплеровскими ДМРЛ-С, имеющими двойную поляризацию антенны и радиус действия 300 км. Уже введено в строй 29 радиолокаторов, объединенных в единую информационную сеть, покрывающую Европейскую территорию России. По Федеральной целевой программе развития метеорологической радиолокационной сети штормооповещения планируется покрыть всю территорию России за счет ввода еще 40 радиолокаторов данного типа.
Кроме того, в рамках развития региональной сети аэродромов малой авиации, планируется развертывание малогабаритных радиолокационных станций типа Контур-Метео-01 и др. с радиусом действия до 200 км. Они также войдут в состав единой информационной радиолокационной метеорологической сети. При этом дискретность существующей наблюдательной радиолокационной метеорологической сети значительно сократится. Это позволит получить обширную и подробную радиолокационную карту полей метеоэлементов, пригодную для метеообеспечения летательных аппаратов на большой территории и, особенно, в зоне действия аэродромов. В этом случае актуальной становится задача использования данных наземной метеорадиолокационной сети для обеспечения безопасности пилотирования, особенно малых судов, не имеющих на борту метеорадиолокатора.
Установка РЛС на борту связана с существенными материальными вложениями, включающими стоимость аппаратуры, конструктивными доработками летательных аппаратов (усиление конструкции, изготовление и монтаж радиопрозрачного обтекателя антенны, увеличение мощности бортовой энергетической установки, повышенные требования к массогабаритным характеристикам и т.д.) и эксплуатационными затратами. Все эти расходы можно значительно сократить, используя данные с наземной радиолокационной метеорологической сети, возможности современной системы связи земля-борт-земля, автоматическую обработку и отображение на бортовом мониторе метеоинформации в режиме виртуальной РЛС. Причем, отображаемые данные, получаемые в режиме онлайн, обладают большими информационными возможностями по сравнению со штатной бортовой метеорадиолокационной станцией.
Информация, полученная с использованием наземной радиолокационной сети, выгодно отличается от данных, получаемых бортовой РЛС. Наземные РЛС имеют более высокую чувствительность приемника и большую мощность излучения передатчика, а следовательно, более высокий энергетический потенциал, и более узкую диаграмму направленности антенны (менее 1,5°), а значит и более высокое разрешение.
Данные, получаемые от наземных РЛС, имеют информацию в полусфере обзора о трехмерной структуре радиоэхо облаков, расположенных в зоне действия сети. Из них на борту по выбору пилота формируются следующие файлы с привязкой к местоположению летательного аппарата:
- отображение наличия опасных атмосферных явлений и их структуры на круговом обзоре на любой высоте (эшелоне) полета (фигура 2);
- переход от наклонных обзоров по лучу РЛС к горизонтальным сечениям и отображение метеообстановки одновременно на нескольких сечениях радиоэхо облаков (фигура 3);
- вертикальные разрезы радиоэхо облаков в любом направлении от борта воздушного судна для выбора траектории обхода опасных облаков (фигура 4);
- определение высоты верхней и нижней границ (мощности) облаков при выборе варианта их обхода над облаками, или подготовки к посадке на аэродроме;
- определение стадии развития облачности (развитие, диссипация, перспектива грозовой опасности);
- более четкое изображение радиоэха облаков в непосредственной близости от самолета;
- автоматическое определение и векторное указание направления, скорости перемещения облачной системы;
- отображение направления и скорости перемещения радиоэха облака по слоям позволяет по структуре радиоэхо судить о направлении и величине сдвига горизонтальной составляющей воздушных потоков в окрестности облака, и т.д..
По обработанной доплеровской и поляризационной информации оцениваются:
- структура воздушных потоков;
- зоны мелкомасштабной турбулентности;
- местоположение и виды осадков.
По данным грозопеленгационной сети, работающей совместно с радиолокационной сетью, дополнительно устанавливается:
- стадия зрелости облака;
- наличие в облаке грозовых разрядов;
- наиболее вероятное местоположение грозовых ячеек;
- частота наземных и межоблачных разрядов и т.д.
Кроме задач обеспечения безопасности полетов авиации, данный способ может быть с успехом применен в работах по активным воздействиям на облачные процессы с целью перераспределения осадков, тушения лесных и степных пожаров, уменьшения загрязнения атмосферы в результате природных и техногенных аварий и т.д.
Поставленная задача в части упрощения и удешевления способа решается за счет замены дорогостоящего бортового метеорологического радиолокатора, или в дополнение к нему, размещением малогабаритной аппаратуры (процессор, монитор, радиостанция, модем и пульт управления), которые для установки не требуют специальной доработки планера, использования дополнительных узлов крепления, установки радиопрозрачного обтекателя антенны РЛС, а также значительного увеличения энергопотребления.
Поставленная задача - повышение надежности решается за счет исключения из состава бортовой аппаратуры механических узлов вращения (электропривод антенной системы), отказ от применения высоковольтной и СВЧ аппаратуры и т.д.
Поставленная задача - повышение грузоподъемности летательного аппарата решается за счет замены бортовой РЛС с блоками питания, преобразователями напряжений, антенной системы и т.д., имеющих значительный вес и габариты, малогабаритными блоками вычислительной техники и средств связи.
Повышение достоверности информации и наглядности ее отображения на бортовом мониторе обеспечиваются за счет использования при программной обработке большого объема данных за счет высокого энергетического потенциала наземных метеорологических радиолокаторов, узкой диаграммы направленности антенны МРЛ, наличия допплеровского и поляризационного каналов, а также информации, поступающей от грозопеленгаторов, грозоотметчиков, измерителей напряженности электрического поля у поверхности Земли и других дистанционных источников метеорологической информации.
Предлагаемый способ сбора, обработки и представления метеорологической информации позволяет пилоту принимать правильное решение за счет поступающих новых данных: о подробной структуре облачных процессов, грозовой активности, местоположении грозовых зарядов, размере, спектре и фазовом составе облачных частиц, видах и интенсивности осадков, горизонтальных и вертикальных воздушных потоках внутри облака, местоположении зон повышенной водности, ледности и атмосферной турбулентности и т.д.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВИАЦИОННЫЙ СПОСОБ ПОДАВЛЕНИЯ РАЗВИТИЯ МОЩНЫХ КОНВЕКТИВНЫХ ОБЛАКОВ | 2010 |
|
RU2436289C2 |
| АВТОМАТИЗИРОВАННАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ШТОРМООПОВЕЩЕНИЯ И АКТИВНЫХ ВОЗДЕЙСТВИЙ НА ОБЛАКА | 2008 |
|
RU2395819C2 |
| Способ разрушения слоя инверсии температуры в тропосфере | 2018 |
|
RU2694200C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ ГРОЗОВОЙ ОПАСНОСТИ | 1996 |
|
RU2100824C1 |
| СПОСОБ РАДИОТЕХНИЧЕСКОГО ОБНАРУЖЕНИЯ СМЕРЧА | 2005 |
|
RU2339971C2 |
| АВИАЦИОННЫЙ МЕТЕОРОЛОГИЧЕСКИЙ КОМПЛЕКС ДЛЯ АКТИВНЫХ ВОЗДЕЙСТВИЙ НА ОБЛАКА | 2002 |
|
RU2213984C1 |
| АВИАЦИОННЫЙ МЕТЕОРОЛОГИЧЕСКИЙ КОМПЛЕКС ДЛЯ АКТИВНЫХ ВОЗДЕЙСТВИЙ НА ОБЛАКА | 2005 |
|
RU2295742C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2020 |
|
RU2746148C1 |
| СИСТЕМА АВИАДИСПЕТЧЕРСКОГО КОНТРОЛЯ ЗА ВОЗДУШНЫМ ДВИЖЕНИЕМ В БЛИЖНЕЙ ЗОНЕ АЭРОПОРТА | 2002 |
|
RU2239846C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ АКТИВНЫМИ ВОЗДЕЙСТВИЯМИ НА ОБЛАКА | 2002 |
|
RU2213983C1 |

Изобретение относится к области радиолокационной метеорологии и может быть использовано для обеспечения метеорологической информацией воздушных судов. Сущность: формируют метеорологическую информацию по всей трассе полета, включая участки взлета-посадки воздушных судов, по данным сетей наземных метеорологических радиолокаторов, грозопеленгаторов и грозорегистраторов, измерителей напряженности электрического поля у поверхности Земли и прочих дистанционных источников метеоинформации. Полученную метеорологическую информацию объединяют в единый блок. С помощью наземной аппаратуры сбора и обработки проводят обработку полного комплекса данных из всего контролируемого воздушного пространства. В виде сформированных файлов по запросу с воздушного судна в автоматическом режиме по каналам связи метеоинформацию передают на вход бортового модема, соединенного с бортовым процессором, в котором проводят дальнейшую ее обработку. С учетом данных приемника позиционирования борта рассчитывают скорость, направление полета и местонахождение воздушного судна в реальном времени. В соответствии с алгоритмом, выбранным пилотом, отображают одновременно для различных высот полета на бортовом индикаторе метеообстановку в виде горизонтальных, круговых и вертикальных в выбранных направлениях сечений радиоэхооблаков с индикацией на их фоне опасных метеорологических явлений из данных обработки и зафиксированных сетями дистанционных источников метеоинформации в реальных координатах уже относительно местоположения самого воздушного судна. Технический результат: повышение безопасности полета воздушных судов за счет увеличения информативности, достоверности, наглядности отображения метеорадиолокационных и других метеорологических данных. 4 ил.
Способ обеспечения воздушных судов метеорологической информацией, включающий сбор наземной метеорадиолокационной информации, программную обработку и радиообмен данными “Земля-борт-Земля”, отличающийся тем, что метеорологическую информацию формируют по данным сетей наземных метеорологических радиолокаторов, грозопеленгаторов и грозорегистраторов, измерителей напряженности электрического поля у поверхности Земли и прочих дистанционных источников метеоинформации, определяющих метеорологическую обстановку по всей трассе полета, включая участки взлета-посадки воздушных судов, объединяют в единый блок метеоинформации, с помощью наземной аппаратуры сбора и обработки проводят обработку полного комплекса данных из всего контролируемого воздушного пространства и в виде сформированных файлов по запросу с воздушного судна в автоматическом режиме по каналам связи передают на вход бортового модема, соединенного с бортовым процессором, в котором проводят дальнейшую обработку метеоинформации, с учетом данных приемника позиционирования борта рассчитывают скорость, направление полета и местонахождение воздушного судна в реальном времени и в соответствии с алгоритмом, выбранным пилотом, отображают одновременно для различных высот полета на бортовом индикаторе метеообстановку в виде горизонтальных, круговых и вертикальных в выбранных направлениях сечений радиоэхооблаков с индикацией на их фоне опасных метеорологических явлений из данных обработки и зафиксированных сетями дистанционных источников метеоинформации в реальных координатах уже относительно местоположения самого воздушного судна.
| А.А.Бычков и др | |||
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
| Иркутск, Институт солнечно-земной физики Сибирского отделения РАН, 2014, стр.152-155 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕТЕОРОЛОГИЧЕСКИХ ПАРАМЕТРОВ | 2007 |
|
RU2344448C2 |

