Изобретение относится к водному транспортному средству, будь то корабли, суда, катера, танкеры, подводные лодки и т.п., в которых движителем является лопасть, подобная веслу.
Известно, что лопастный движитель в воде обладает большим коэффициентом тяги, чем винт (патент РФ №2172700, В63Н 1/00), хотя достигается это выбором оптимального угла лопасти по отношению к потоку воды в зависимости от скорости. Но в названном патенте никак не рассматривается механизм привода и управления лопастью, т.е. не решена главная задача изобретения, а рассмотрен только механизм взаимодействия лопасти с водой. Поршневой ДВС с КШМ и преобразователем вращательного движения в колебательное является сложным механическим устройством, поэтому реализация таких конструкций в передаче усилий от двигателя на лопасть оказывается нерациональной и потому не находит практического применения. Крыльчатый движитель изобретен давно, имеет хорошую маневренность, большую мощность и большие лопасти, хороший КПД, но привод его от ДВС слишком сложный и громоздкий, поэтому он тоже не получил широкого распространения. В последнее время получил развитие движитель типа «машущее крыло», однако он вызывает заметную качку судна и привод для него также не имеет хороших технических решений.
Движителями водных транспортных средств были паруса, весла, колеса с лопастями, винты. Живые существа в воде работают ластами и плавниками. В существующих судах отсутствуют движители типа плавников, ласт или лопастей, т.к. привод их от существующих ДВС осуществляется достаточно сложно и потому малоэффективно. Связано это с тем, что превращение вращательного движения в колебательное - энергетически невыгодное преобразование. Выход ДВС проще соединить с винтом и тягу судна осуществлять этим винтом, что имеет место в большинстве современных водных транспортных средств. Но ДВС с КШМ - слишком нерациональное, малоэффективное устройство, поэтому не только применять его в транспортных средствах неразумно, но и выпуск их пора прекратить (см. книгу «Автомобильные проблемы», Москва, Сайнс-Пресс, 2006). Если исходить из КПД ТС, то все существующие движители и ТС пора переделывать на более эффективные.
Целью настоящего изобретения является непосредственный привод лопасти от роторного колебательного двигателя (без КШМ). При этом лопасть крепится с помощью рамы непосредственно к концам оси ротора. Такое построение движителя упрощает конструкцию, облегчает вес устройства, избавляет двигатель от системы смазки и системы охлаждения и дает заметно больший КПД по сравнению со стандартными судовыми дизелями, так как роторный поршень работает непосредственно на лопасть без всяких промежуточных механизмов. Роторный колебательный двигатель можно делать двухстороннего действия, так что один конструктивный цилиндр заменяет 12 цилиндров обычного судового двигателя. В предложенном устройстве привод осуществляется значительно проще других существующих устройств.
Принцип работы устройства поясняется на чертежах, где:
на фиг.1 показан общий вид сверху при радиальном расположении клапанов,
на фиг.2 дан боковой вид спереди при лопасти отклоненной в сторону,
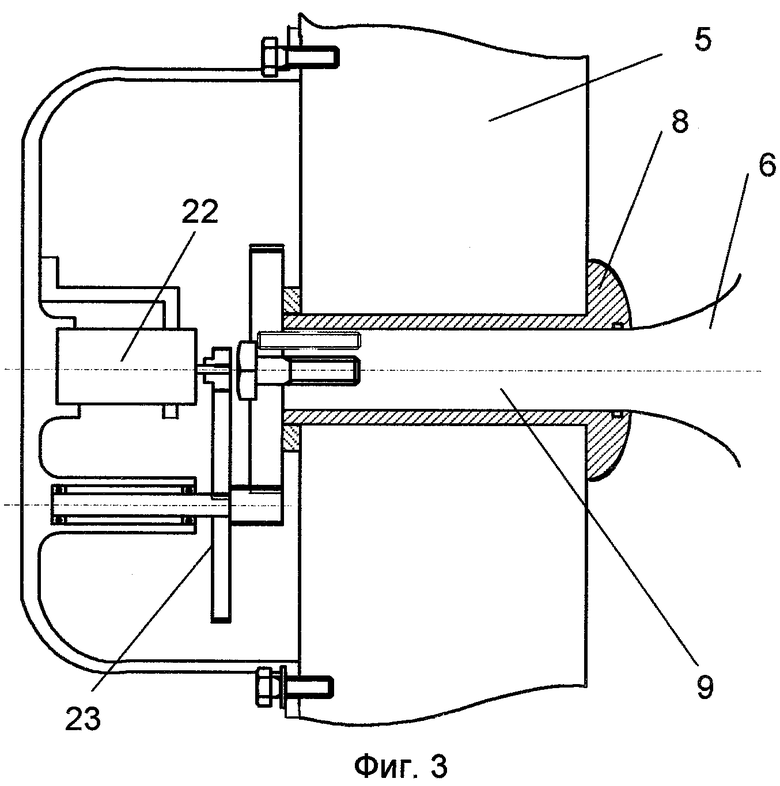
на фиг.3 показано сечение редукторного механизма поворота лопасти,
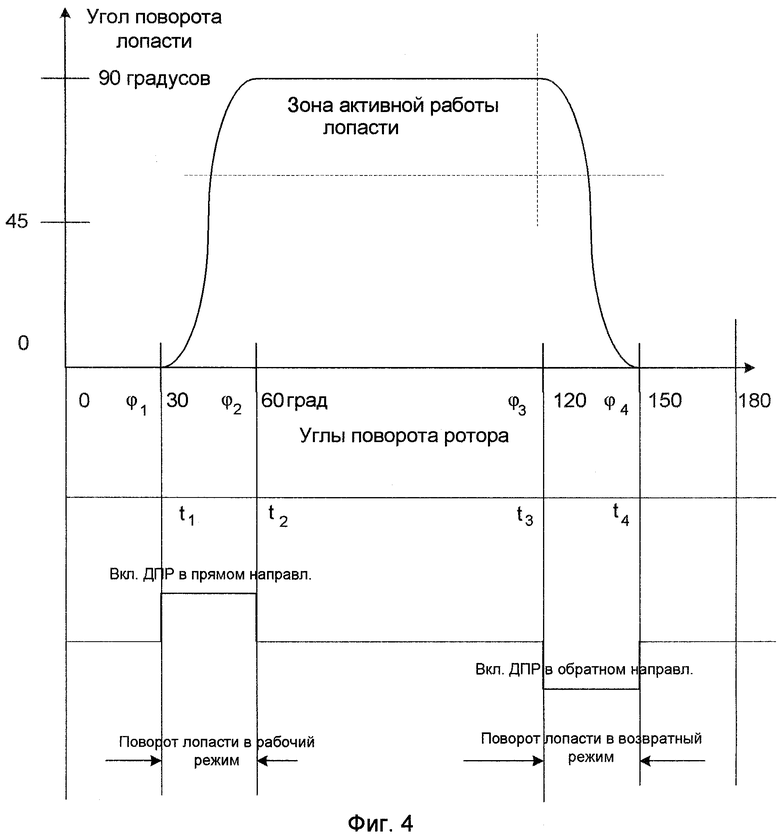
на фиг.4 даны временные диаграммы работы клапанов и электродвигателя управления поворотом лопасти,
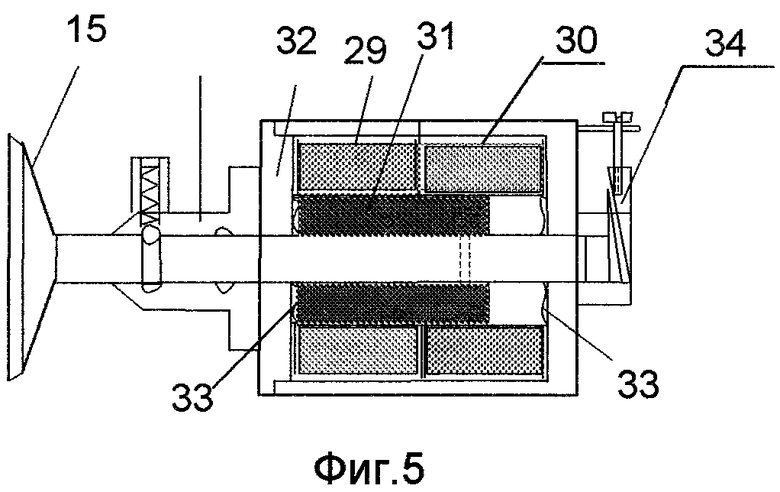
на фиг.5 показан разрез электромагнитного привода клапана,
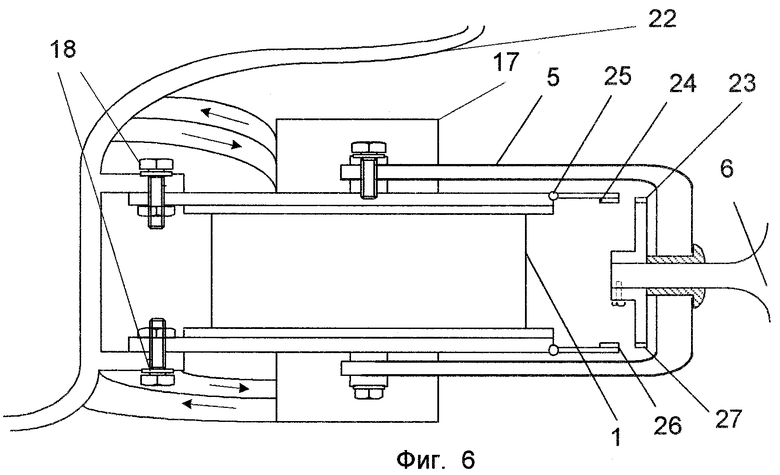
на фиг.6 показано расположение однолопастного движителя сбоку корабля и механизм вращения лопасти с помощью зубчатой шестеренки,
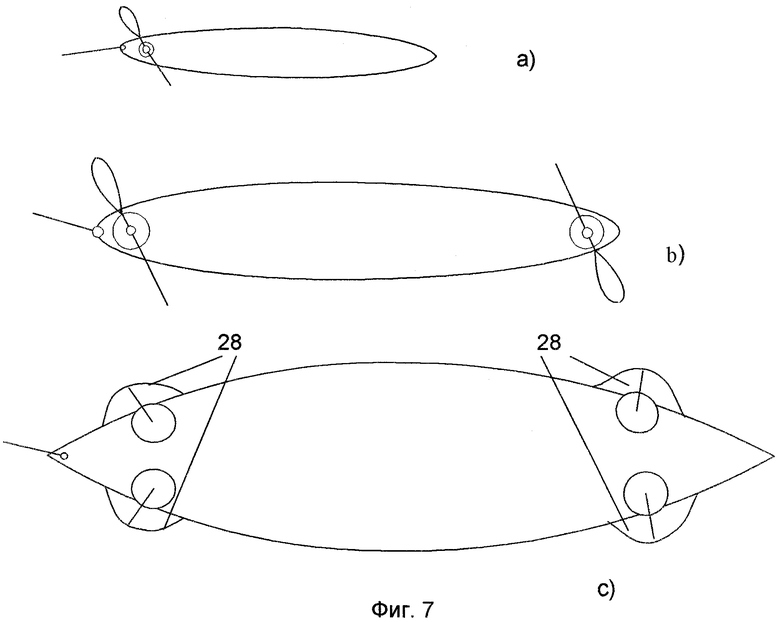
на фиг.7 даны варианты расположения движителей на водном транспорте: а) прогулочный катер с одним движителем, в) сухогруз с двумя движителями, с) скоростной лайнер с четырьмя движителями и ограничителями рассеяния воды вверх и вниз,
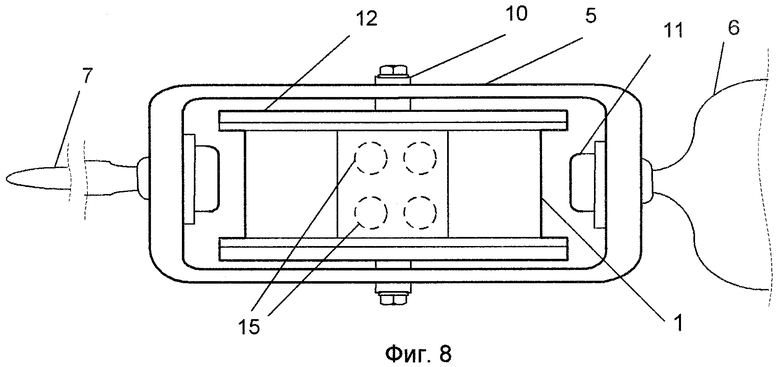
на фиг.8 показан боковой вид движителя с двумя лопастями с радиальным расположением клапанов.
Движитель состоит их роторного колебательного двигателя внутреннего сгорания, преимущественно дизеля, двухстороннего действия. Он содержит статор 1 роторного двигателя с перемычками 2, ротор 3 с поршневыми перемычками 4, раму 5, жестко соединенную с помощью шпонок и болтов с осью ротора 10, в середине рамы находится втулка 8, через которую проходит ось 9 от лопасти 6, на конце которой к ней и к раме привинчен редуктор 11, внутри которого установлен электродвигатель 22. Промежуточная шестерня редуктора 23 связана непосредственно с шестерней на оси электродвигателя, фиг.3, и с понижением передачи с шестерней на оси 9 поворотной лопасти 6. Статор 1 и расположенный соосно внутри него ротор 3 сжаты пластинами 12 с торцевых сторон и свинчены болтами 13. Радиальное расположение электромагнитов 14 и клапанов 15 позволяет раме 5 и лопасти 6 (фиг.1) отклоняться на больший угол, чем при торцовом расположении клапанного механизма, фиг.6. Электромагниты 14 клапанов 15 и форсунки 21 впрыска топлива, фиг.2, закрыты от воды, в которой находится двигатель, крышками 17. Впускные и выпускные трубы уходят в корпус судна. Электромагниты 14 отклонены от радиальной линии для увеличения хода рамы и лопасти. Поэтому расточка посадочного отверстия для клапана также должна производиться с учетом угла отклонения. При торцовом расположении клапанов угол рабочего хода лопасти оказывается меньше, хотя такое расположение клапанов выгоднее с точки зрения впускных и выхлопных труб с разных сторон статора.
На верхней и нижней торцовых пластинах 12 имеется удлинение в одну сторону движителя с отверстиями 18, через которые осуществляется крепление движителя к корпусу 22 судна, как показано на фиг.6. Металлические щиты вдоль хода лопасти сверху и снизу от нее для увеличения пропульсивного коэффициента движителя прикрепляются к корпусу судна, фиг.7 в). На фиг.6 дана врезка двигателя в корпус судна, она осуществляется в углубление в корпусе с целью уменьшения подводных габаритов судна. Движитель может быть закреплен с наклоном, лопастью вниз, как весла у гребцов древних судов, при этом образуется дополнительная подъемная сила. Это уменьшает бурление воды возле движителя при малой загрузке судна.
Рабочий процесс двигателя происходит в следующем порядке.
Запуск двигателя осуществляется подачей из баллона высокого давления некоторого количества горючей смеси через форсунки во все камеры, затем во вторую камеру подается смесь для сжатия первой камеры до момента вспышки, после чего двигатель запускается и подача смеси от баллона перекрывается. Далее смесь подается импульсами через форсунки впрыска, как в обычных дизелях. При запуске и остановке движителя лопасть устанавливается горизонтально. Возможен запуск двигателя от стартера со схемой реверса напряжения в зависимости от положения ротора.
Поворот ротора и рамы происходит в угловых пределах φ1-φ2 и φ3- φ4 градусов до срабатывания концевых выключателей 20, (фиг.1), которые определяют краевое положение рамы и исходные моменты работы схемы управления электромотором и электромагнитами клапанов. Последовательность работы цилиндров и их фазы происходят в соответствии с таблицей:
Порядок работы камер-цилиндров I-IV-III-II, причем камеры I и III - это камеры рабочего прямого хода лопасти, а камеры I и IV работают на возврат лопасти в облегченном режиме с малым потреблением горючего. На интервале t1-t2 лопасть с помощью электродвигателя и редуктора поворачивается в перпендикулярное к повороту рамы положение, на интервале t2-t3 лопасть работает, отталкиваясь от захваченной ей воды, на интервале времени t3-t4 лопасть с помощью редуктора поворачивается в горизонтальное положение, параллельно движению рамы. Поворот лопасти на малых судах можно осуществить без управляющего электромотора с помощью механических стержней и упоров, убираемых с помощью электромагнитов. Для этого на конце оси лопасти с внутренней стороны рамы крепятся две планки под углом между собой 90° и под углом 45° по отношению к плоскости лопасти, а на статоре за 30° от кнопки концевого выключателя устанавливаются опоры. Планка и связанная с ней лопасть поворачиваются на угол 90° от упора в выступ 24, фиг.6, который поворачивает лопасть, упираясь в эти планки. Чтобы лопасть не болталась при вращении ротора от заданного ей положения, после ее поворота срабатывают шаровые фиксаторы с помощью электромагнитов, которые выключаются при подходе рамы к противоположной стороне, где после очередного поворота планки упираются в другую опору 26, после чего срабатывает другой фиксатор.
При запуске и остановке движителя лопасть устанавливается горизонтально. В случае одной лопасти нагрузка на двигатель получается односторонней, и в момент срабатывания III-го цилиндра давление на подшипник оси ротора получается большой величины. Если это давление будет превышать норму для одноразовой смазки этого подшипника, то следует или применить в нем роликовые подшипники, или перейти на вариант с двумя лопастями, когда каждая лопасть компенсирует давление газов сопротивлением воды на лопасть.
Общий вид движителя с двумя противофазными лопастями показан на фиг.8. В этом движителе камеры II и IV работают не на возврат лопасти 6 в исходное положение, а работают на создание движущей силы противоположной лопастью 7, лопасть 6 движется при этом горизонтально. Такой движитель с двумя лопастями располагается в носовой и кормовой частях судна, фиг.6b), или в кормовой, если он один, фиг.6,а).
Поворот лопасти с внутренней стороны поворотной рамы можно осуществлять с помощью шкива с шестеренкой, который в крайнем положении подходит к линейной зубчатой планке, которая поворачивает его и лопасть вместе с ним на угол колебания лопасти, т.е. на 90 градусов. При обратном движении рамы в этом случае поворотную линейку-шестеренку необходимо отклонять на интервале поворота t1-t2 с помощью электромагнита или вспомогательного рычага с приводом от оси ротора.
Управление клапанами 15 осуществляется с помощью реверсивных электромагнитов 14, имеющих обмотки на открывание 29 клапана и на закрывание 30, фиг.5. Импульсы подаются через транзисторы или мощные микросхемы. Для уменьшения удара якоря 31 по корпусу 32 поставлены плоские гофрированные пружины 33. Регулировка клапанов осуществляется с помощью трапеции 34.
Корпус двигателя находится в воде, которая является естественной средой для охлаждения двигателя, блок форсунок и клапанов отделен от воды крышками, в которых проходят в корпус судна трубы впуска воздуха и выпуска отработанных газов. Температура работы двигателя в местах расположения уплотнительных колец и планок, а также в подшипнике ротора и оси рамы устанавливается после прогрева двигателя, когда лопасть находится в горизонтальном положении, эта температура устанавливается при проведении ОКР испытаний и находится в пределах 70-90°, т.е. должна исключать закипание воды вокруг двигателя. В противном случае необходимо применять дополнительно охлаждаемые водой ребра.
Для увеличения тяги движителя, по аналогии с винтовым движителем, необходимо уменьшить рассеивание воды возле лопасти, т.е. поставить щитки 28 возле лопасти вдоль ее хода, что увеличивает силу тяги движителя фиг.7с).
Элементарные расчеты показывают, что весовая мощность такого движителя для водного транспорта получается в несколько раз выше, чем у судовых дизелей, КПД судов также получается в 1,5-2 раза выше. Конечно, расположение двигателя в воде затрудняет его ремонтные свойства. Если расположить двигатель внутри корабля, а изоляцию от воды провести возле оси лопасти, то следует признать, что это тоже не простой механизм со шторками или с резиновыми изоляторами. В этом случае необходимо делать систему охлаждения. Пневматический запуск в данном варианте двигателя является лучшим вариантом по сравнению со стартером, но он требует экспериментальной проработки. Однако множество положительных качеств роторного варианта превалирует над новыми возникшими технологическими трудностями. Два цилиндра и отсутствие системы смазки и охлаждения, отсутствие коленчатого вала делают технологию данного варианта двигателя намного более простой и дешевой по сравнению с многоцилиндровыми судовыми дизельными двигателями. Так как технология изготовления предложенного двигателя во много раз проще ДВС с КШМ, то стоимость его дешевле. Повышение КПД судов в 1,5-2 раза позволяет увеличить дальность хода при том же объеме горючего, что очень важно для морских перевозок грузов или пассажиров на большие расстояния, что в ближайшие годы будет иметь решающее значение с учетом КПД судов и других ТС.
Для мощного судового двигателя диаметром Dвнутр=600 мм и диаметром ротора dнаружн=340 мм получаем среднее давление поршня 15000 кГ, что эквивалентно мощности двигателя 5000 лс при 420 колебаниях в минуту. На поворот лопасти в этом случае приходится 24 мс. Хватит ли мощности двигателя ДПР-62 для работы в прерывистом режиме для поворота лопасти через редуктор за такое время может показать только экспериментальная проверка. Очевидно, что мощности ДПР-72 хватит для выполнения данной функции, но желательно иметь двигатель минимальных габаритов, чтобы максимально снизить потери мощности на сопротивление воды колебаниям редуктора.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВИЖИТЕЛЬ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2384469C2 |
| СИСТЕМА ТЕПЛО- И ЭЛЕКТРОСНАБЖЕНИЯ АВТОМОБИЛЯ | 2014 |
|
RU2566577C1 |
| ВЕТРОСИЛОВАЯ УСТАНОВКА | 2007 |
|
RU2335428C1 |
| РОТОРНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2009 |
|
RU2411377C2 |
| РОТОРНАЯ ЭНЕРГЕТИЧЕСКАЯ СУДОВАЯ УСТАНОВКА | 2016 |
|
RU2633821C1 |
| РЕАКТИВНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ | 1994 |
|
RU2094630C1 |
| ДВИГАТЕЛЬ, ВЕРТОЛЕТ, МЕЛКОВОДНОЕ СУДНО | 1999 |
|
RU2153088C1 |
| ВЫСОКОСКОРОСТНОЕ СУДНО | 2000 |
|
RU2163555C1 |
| СПОСОБ УПРАВЛЕНИЯ СУДОВОЙ КОМБИНИРОВАННОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ | 2011 |
|
RU2483972C1 |
| СУДНО КАШЕВАРОВА | 1991 |
|
RU2104901C1 |

Изобретение относится к области судостроения. Судовой движитель содержит роторный колебательный двигатель. Ось ротора расположена вертикально и соединена с рамой, которая установлена с возможностью поворота вместе с ротором. На раме находится втулка, в которую вставлена ось лопасти. При выполнении рабочего хода гребная поверхность лопасти расположена вертикально, а при выполнении обратного хода - горизонтально. Поворот лопасти вокруг своей оси осуществляется при помощи электродвигателя и редуктора, закрепленных на раме. Судовой движитель оснащен баллоном высокого давления с горючей смесью, который используется для запуска двигателя. Достигается повышение КПД судового движителя и упрощение его конструкции. 7 з.п. ф-лы, 8 ил., 1 табл.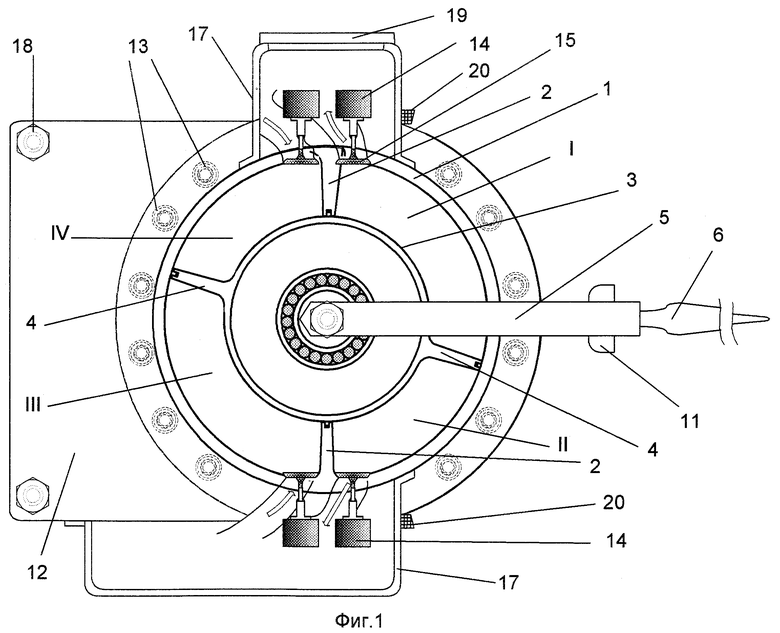
1. Судовой движитель, построенный на основе роторного двигателя колебательного типа двухстороннего действия, содержащий впускные и выпускные клапана и форсунки впрыска дизельного топлива, отличающийся тем, что оба конца оси ротора жестко соединены с рамой, в середине внешней части которой имеется втулка, через которую проходит ось лопасти, создающей давление при совершении рабочего хода и установленной горизонтально при ее движении в обратном направлении.
2. Судовой движитель по п.1, отличающийся тем, что в механизме поворота лопасти применен малый электродвигатель с редуктором, закрепленный на раме с внутренней стороны по отношению к лопасти.
3. Движитель по п.1, отличающийся тем, что статор двигателя находится в воде, которая является естественной средой для охлаждения двигателя, а впускной и выпускной клапана и форсунка впрыска топлива отделены от воды соответствующими перегородками блока двигателя и могут иметь доступ изнутри судна.
4. Движитель по п.1, отличающийся тем, что задний ход и остановка судна осуществляются за счет соответствующей программы управления электродвигателем поворота лопасти и работой форсунок по сигналам с концевых выключателей.
5. Движитель по п.1, отличающийся тем, что двигатель и лопасть наклонены по отношению к горизонтальной ватерлинии судна лопастью вниз для создания дополнительной подъемной силы судна и уменьшения бурления воды на поверхности возле лопасти при малой загрузке судна.
6. Движитель по п.1, отличающийся тем, что для запуска двигателя применен баллон высокого давления, сжатая горючая смесь которого поочередно подается через форсунки до момента воспламенения в камере сгорания и перехода двигателя в рабочий режим.
7. Движитель по п.1, отличающийся тем, что вдоль хода лопасти в рабочем положении к корпусу судна привинчены щитки для увеличения пропульсивного коэффициента движителя.
8. Движитель по п.1, отличающийся тем, что клапана и форсунки движителя расположены с торцевых сторон роторного двигателя.
| СПОСОБ СОЗДАНИЯ ДВИЖУЩЕЙ СИЛЫ АППАРАТА В ТЕКУЧЕЙ СРЕДЕ И ДВИЖИТЕЛЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2172700C2 |
| RU 2070980 C1, 27.12.1996 | |||
| РЕАКТИВНЫЙ СУДОВОЙ ДВИГАТЕЛЬ | 1998 |
|
RU2140374C1 |
| АРМИРОВАННЫЙ СТЕКЛОВОЛОКНОМ АБСОРБИРУЮЩИЙ СЕПАРАТОР | 1998 |
|
RU2181223C2 |
| 0 |
|
SU161596A1 | |

